Изобретение относится к способу оптимизации времени включения Кориолисова гироскопа и Кориолисову гироскопу, подходящему для реализации способа.
Кориолисовы гироскопы (вибрационный гироскоп, датчики скорости вращения) содержат систему масс, которая состоит из одной части или обычно из нескольких частей и приводится в колебательное движение. С этой целью для работы Кориолисова гироскопа возбуждают первый тип колебаний (возбуждающих колебаний) системы масс. Если выполняется вращательное движение Кориолисова гироскопа вдоль его осей чувствительности, возникающие Кориолисовы силы возбуждают второй тип колебаний системы масс, которые измеряют непосредственно или косвенно, и во время данного процесса получают выходной сигнал, который представляет второй тип колебаний (считываемых колебаний или регистрируемых колебаний). Считываемый сигнал оценивают в соответствии с изменениями амплитуды, представляющими собой меру измерения скорости вращения, придаваемой Кориолисову гироскопу. В Кориолисовом гироскопе, соответствующем системе с обратной связью, амплитуда считываемых колебаний постоянно восстанавливается до фиксированного значения, например до нуля, с помощью цепи управления таким образом, что приложенную скорость вращения выводят из компенсирующих сил, необходимых в данном процессе. Считываемый сигнал при работе системы с обратной связью в этом случае пропорционален Кориолисовой силе FC, в то время как считываемый сигнал при работе системы без обратной связи пропорционален амплитуде регистрируемых колебаний.
Когда Кориолисов гироскоп включают в первый раз или включают повторно (установка в исходное состояние), амплитуда возбуждающих колебаний в момент времени включения t=0 имеет значение, равное нулю, и затем устанавливается равным предварительно заданному значению для возбуждающих колебаний. В этом случае время, за которое достигается установившееся состояние амплитуды возбуждающих колебаний, может составлять более 0,1 сек, в то время как период измерения для определения считываемого сигнала может быть намного меньше, например, только 10 мсек. В частности, во время включения Кориолисова гироскопа, которому придана высокая скорость вращения, например, равная 1000°/сек, считываемый сигнал или масштабный коэффициент гироскопа может быть определен очень быстро с достаточной точностью. Поскольку во время включения амплитуда возбуждающих колебаний еще не достигает своего значения в установившемся состоянии, считываемый сигнал на выходе Кориолисова гироскопа может предоставлять "неверное" значение, не удовлетворяющее техническим требованиям для Кориолисова гироскопа.
Возможность решения данной проблемы состоит в оптимизации частотного диапазона основного контроллера блока считывания. Дополнительная возможность решения данной проблемы состоит в обеспечении достаточного источника силы, чтобы во время включения система масс возбуждалась первым типом колебаний силами, диапазон которых значительно выходит за пределы сил, необходимых при нормальных условиях.
Задача изобретения, таким образом, состоит в обеспечении простого способа оптимизации времени включения Кориолисова гироскопа, который можно комбинировать с другими мероприятиями для оптимизации времени включения, и подходящего для этого Кориолисова гироскопа.
Согласно настоящему изобретению данная задача решена с помощью способа и Кориолисова гироскопа в соответствии с независимыми пунктами формулы изобретения. Предпочтительные варианты реализации раскрыты в зависимых пунктах формулы.
Способ оптимизации времени включения Кориолисова гироскопа согласно настоящему изобретению, имеющего систему масс, приводимую в состояние возбуждающих колебаний Кориолисова гироскопа параллельно первой оси, причем отклонение системы масс в результате действия Кориолисовой силы вдоль второй оси, заданной перпендикулярно первой оси, проверяют посредством выходного сигнала Кориолисова гироскопа, способ включает в себя определение амплитуды возбуждающих колебаний Кориолисова гироскопа в заданный момент времени, определение выходного сигнала Кориолисова гироскопа в заданный момент времени и генерацию нормированного выходного сигнала Кориолисова гироскопа путем умножения определенного выходного сигнала на отношение амплитуды возбуждающих колебаний Кориолисова гироскопа в установившемся состоянии к определенной амплитуде.
Согласно варианту осуществления этапы определения амплитуды, определения выходного сигнала и генерирования нормированного выходного сигнала повторяют по меньшей мере в дополнительно заданное время.
Согласно варианту осуществления по меньшей мере один из заданных моментов времени определяют как достигнутый при помощи устройства отсчета времени.
Согласно другому варианту осуществления амплитуда возбуждающих колебаний Кориолисова гироскопа определяют непрерывно. По меньшей мере один из заданных моментов времени определяют как достигнутый, если определенная амплитуда возбуждающих колебаний достигает соответствующего предварительно заданного значения.
Если амплитуда возбуждающих колебаний определяют непрерывно, способ завершается согласно варианту осуществления, если определенная амплитуда соответствует амплитуде возбуждающих колебаний Кориолисова гироскопа в установившемся состоянии.
Согласно другому варианту осуществления способ завершается после достижения предварительно заданного момента времени.
Кориолисов гироскоп согласно настоящему изобретению содержит систему масс, приводимую в состояние возбуждающих колебаний Кориолисового гироскопа параллельно первой оси, причем отклонение системы масс в результате действия Кориолисовой силы вдоль второй оси, заданной перпендикулярно к первой оси, проверяют с использованием выходного сигнала Кориолисова гироскопа. Дополнительно, Кориолисов гироскоп содержит считывающее устройство, которое содержит первый блок обнаружения, второй блок обнаружения и блок вывода. Первый блок обнаружения выполнен с возможностью определять амплитуду возбуждающих колебаний Кориолисова гироскопа в заданный момент времени, в то время как второй блок обнаружения выполнен с возможностью определять выходной сигнал Кориолисова гироскопа в заданный момент времени. Блок вывода выполнен с возможностью генерировать нормированный выходной сигнал Кориолисова гироскопа путем умножения определенного выходного сигнала на отношение амплитуды возбуждающих колебаний Кориолисова гироскопа в установившемся состоянии к определенной амплитуде.
Согласно варианту осуществления Кориолисов гироскоп содержит дополнительное устройство отсчета времени, выполненное с возможностью определять заданный момент времени как достигнутый.
Согласно другому варианту осуществления Кориолисов гироскоп содержит дополнительный блок сравнения, выполненный с возможностью сравнивать определенную амплитуду с предварительно заданным значением.
В дальнейшем изобретение будет объяснено подробно со ссылкой на сопровождающие чертежи в соответствии с примерными вариантами осуществления.
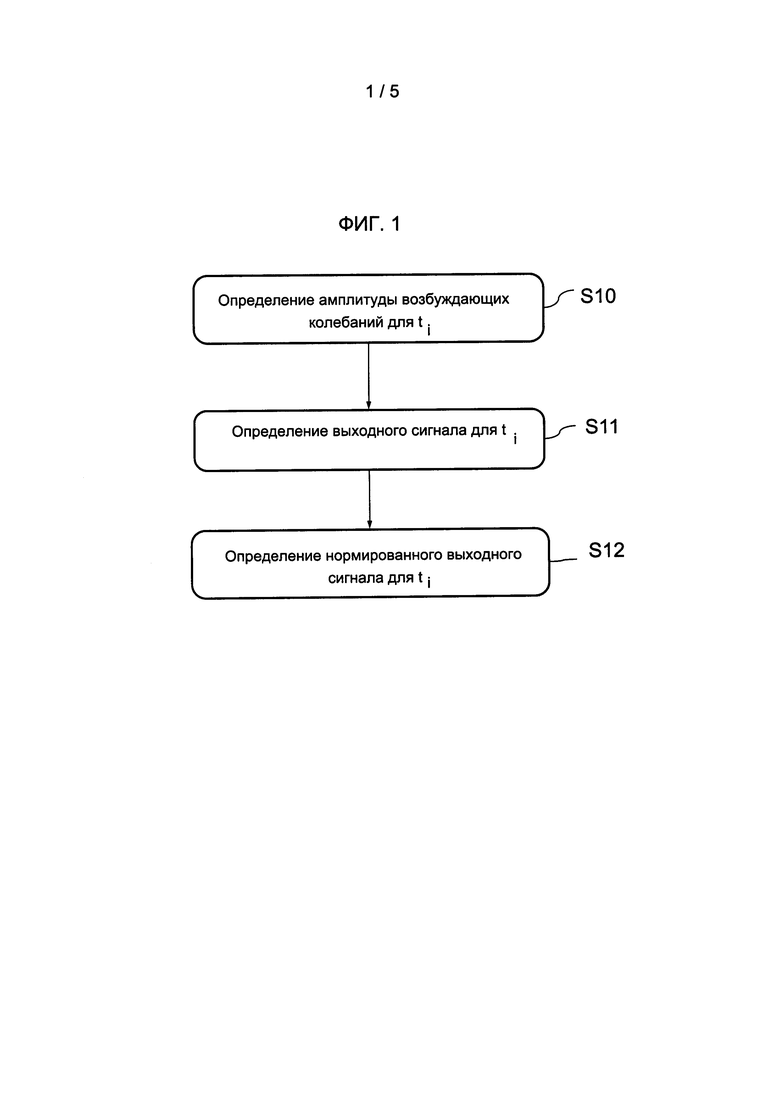
На фиг. 1 схематично показан первый вариант осуществления способа оптимизации времени включения Кориолисова гироскопа согласно настоящему изобретению.
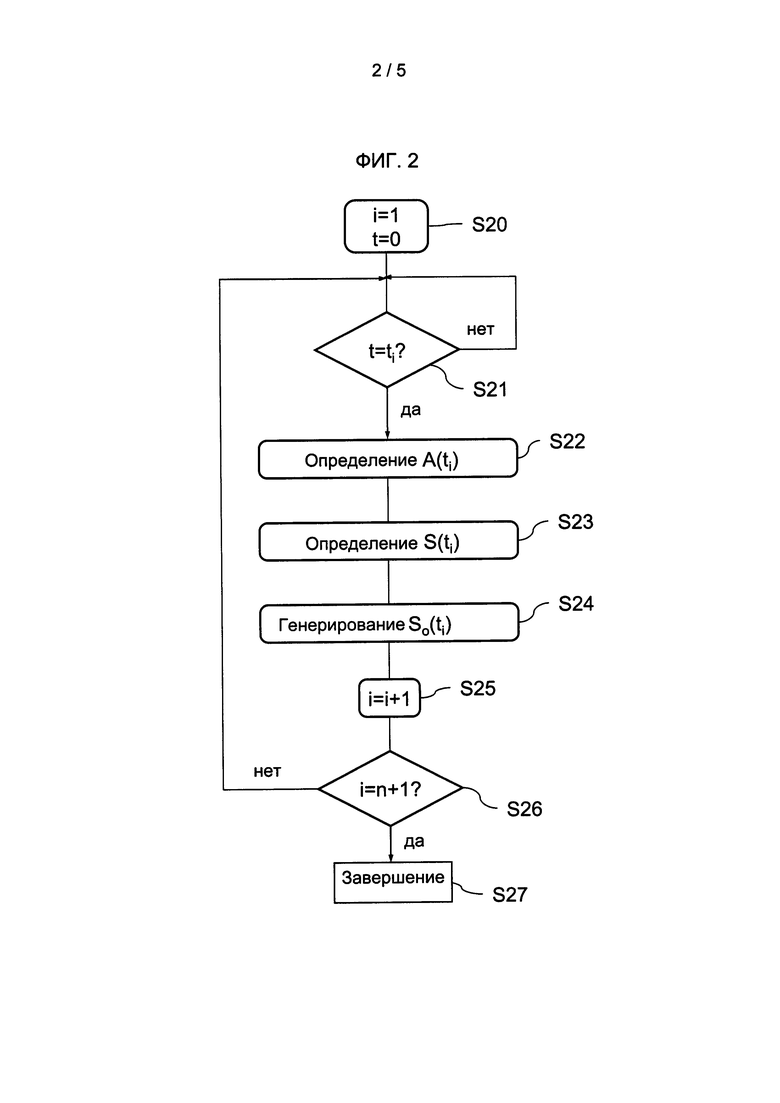
На фиг. 2 показано схематическое изображение второго варианта осуществления способа оптимизации времени включения Кориолисова гироскопа, в котором заданные моменты времени определяются устройством отсчета времени.
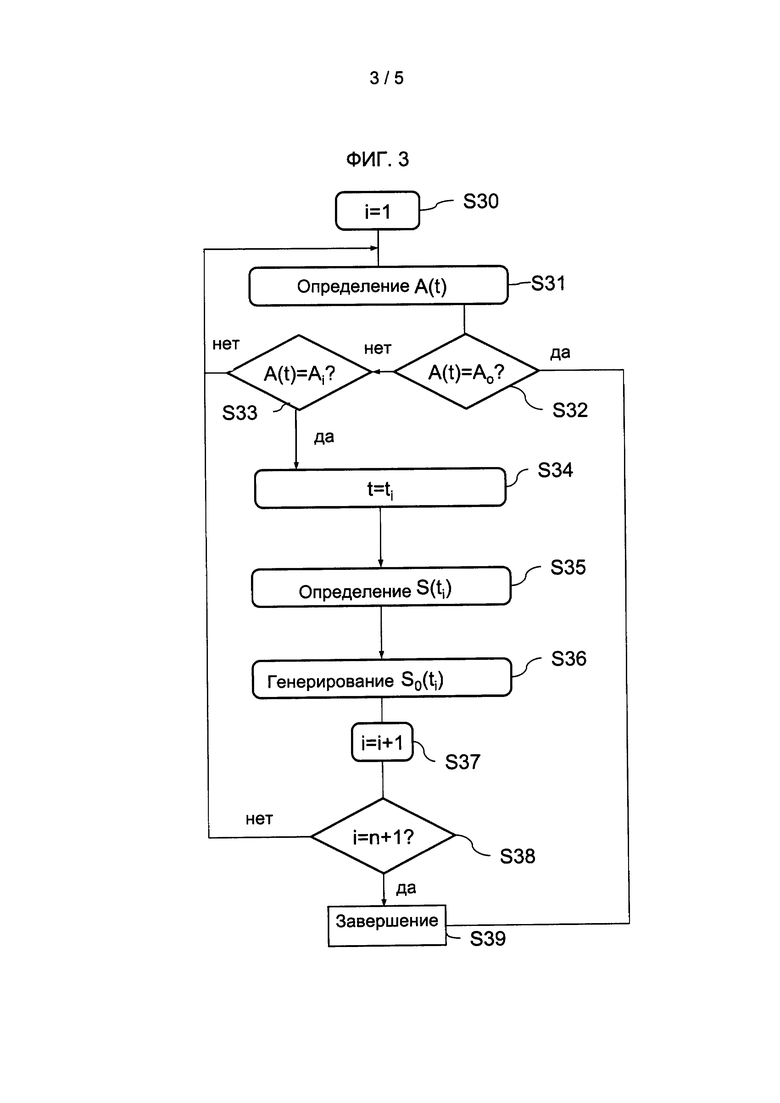
На фиг. 3 показано схематическое изображение третьего варианта осуществления способа оптимизации времени включения Кориолисова гироскопа согласно настоящему изобретению, в котором заданные моменты времени определяются путем сравнения непрерывно определяемой амплитуды с соответствующим предварительно заданным значением.
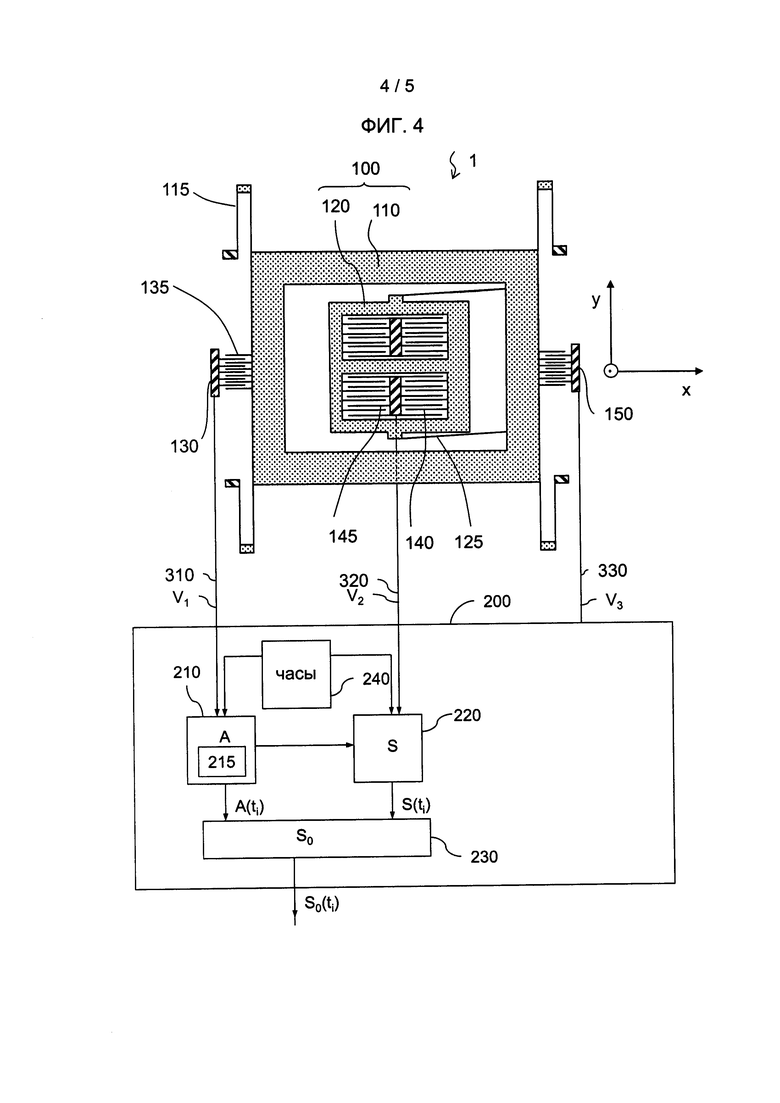
На фиг. 4 показано схематическое изображение Кориолисова гироскопа в виде состоящего из двух частей одиночного осциллятора согласно варианту осуществления изобретения.
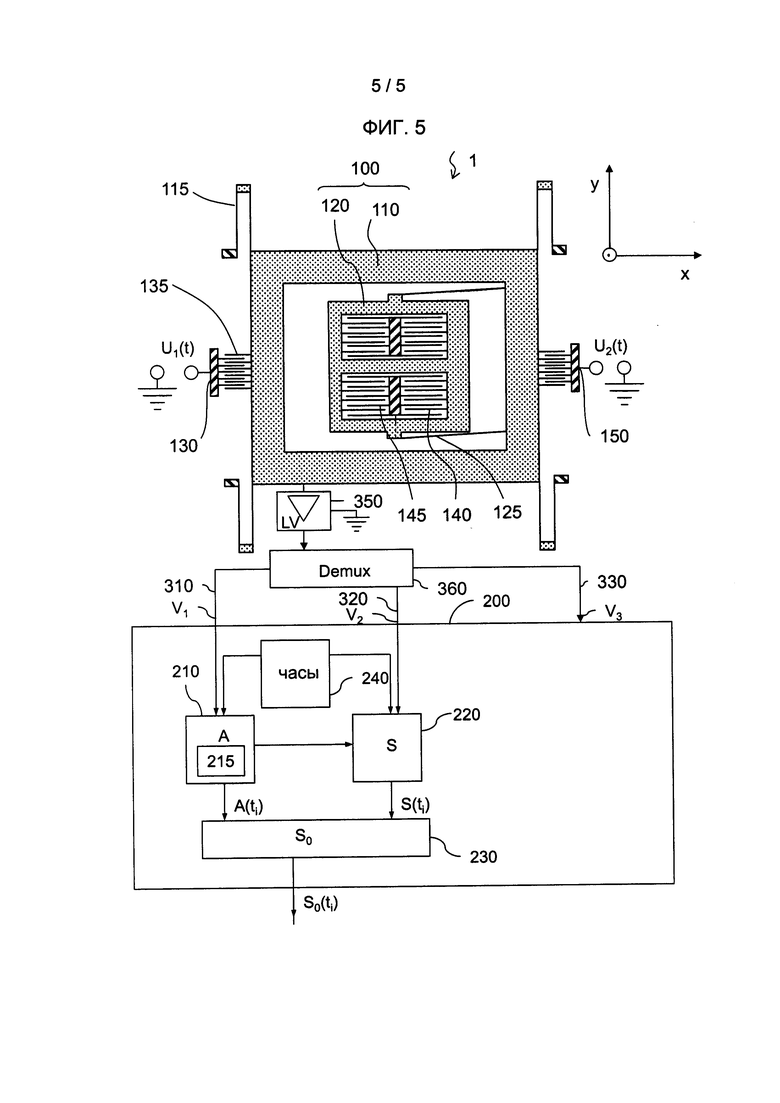
На фиг. 5 показано схематическое изображение Кориолисова гироскопа в виде состоящего из двух частей одиночного осциллятора согласно дополнительному варианту осуществления изобретения.
Обычно в Кориолисовом гироскопе коэффициент пропорциональности между силой Кориолиса и скоростью вращения, которая пропорциональна амплитуде возбуждающих колебаний, называют масштабным коэффициентом. В этом случае используется уравнение:

в котором для производной отклонения x возбуждающих колебаний используется следующее уравнение:

где
FC - Кориолисова сила,
m - масса регистрирующего осциллятора,
x - отклонение возбуждающих колебаний,
Ω - угловая скорость или скорость вращения (то есть измеряемый параметр),
A(t) - амплитуда отклонения возбуждающих колебаний, и
ω - рабочая частота возбуждающих колебаний, которая предпочтительно соответствует резонансной частоте возбуждающего осциллятора.
В данном процессе возбуждающие колебания Кориолисова гироскопа являются колебаниями, в которые приводится система масс Кориолисова гироскопа параллельно первой оси (оси x). Масса m регистрирующего осциллятора в уравнении (1) является массой системы масс, которая в результате действия Кориолисовой силы вдоль второй оси (оси y) приводится в возбуждение до регистрируемых колебаний. Систему масс Кориолисова гироскопа можно формировать как систему масс, состоящую из одной части, или как систему масс, состоящую из нескольких частей. Например, система масс может содержать две частичные массы (осцилляторы), которые соединены друг с другом посредством пружинной системы и которые могут осуществлять относительное перемещение относительно друг друга. Для такой системы масс, состоящей из нескольких частей, в уравнении (1) в качестве массы m регистрирующего осциллятора, совершающего колебания вдоль второй оси, используется только масса частичной массы.
Если включение Кориолисова гироскопа выполнено из состояния покоя в момент времени t=0, то есть, когда значение A(t=0) равно 0, по прошествии от одного до десяти процентов (1%-10%) времени установления амплитуды возбуждающих колебаний производную амплитуды A(t) по времени можно не учитывать при следующих типичных значениях: при времени установления амплитуды A(t) более 0,1 сек и при рабочей частоте возбуждающих колебаний равной ω=2п⋅10000 сек-1.
На фиг. 1 схематично показан первый вариант осуществления способа оптимизации времени включения Кориолисова гироскопа.
Здесь в заданный момент времени ti определяют амплитуду A(ti) возбуждающих колебаний, а также выходной сигнал S(ti) Кориолисова гироскопа в заданный момент времени ti (этапы S10 и S11). Выходной сигнал S может быть вышеупомянутым масштабным коэффициентом или выходным сигналом Кориолисова гироскопа. Выходной сигнал S Кориолисова гироскопа может подаваться уже в обработанной форме. Например, выходной сигнал может быть уже обработан посредством аналогово-цифровых преобразователей, демодуляторов и/или других компонентов, например, с целью компенсации влияния температуры.
На этапе S12 для заданного момента времени ti генерируется нормированный выходной сигнал S0(ti) путем деления определенного выходного сигнала S(ti) на определенную амплитуду A(ti) и умножения результата на амплитуду А0 возбуждающих колебаний в установившемся состоянии. В данном процессе амплитуда A0 возбуждающих колебаний в установившемся состоянии известна из процесса калибровки или из значения, установленного в контроллере с обратной связью для амплитуды. Таким образом, для получения нормированного выходного сигнала S0(ti) применима следующая формула:
Если выходной сигнал S Кориолисова гироскопа представляет собой масштабный коэффициент, нормированный выходной сигнал S0 будет нормированным масштабным коэффициентом, который можно использовать на последующих этапах для расчета других величин или выходных сигналов Кориолисова гироскопа.
Посредством данной нормализации для заданного момента времени ti, который находится в пределах времени установления возбуждающих колебаний, может генерироваться действительный выходной сигнал, удовлетворяющий всем техническим требованиям. В принципе, способ можно также реализовать для заданных моментов времени ti, лежащих за пределами времени установления.
Способ оптимизации времени включения, показанный на фиг. 1, можно осуществлять только для одного заданного момента времени ti в пределах времени установления возбуждающих колебаний или можно осуществлять для нескольких моментов времени ti, где i=1 до n, причем один, несколько или все из заданных моментов времени ti (i=1…n) могут лежать в пределах времени установления возбуждающих колебаний.
По завершении времени установления возбуждающих колебаний способ генерирования нормированного выходного сигнала может быть снова опущен, так что Кориолисов гироскоп выдает определенный выходной сигнал S(t). Это соответствует обычному процессу регистрации Кориолисова гироскопа.
Заданный момент(ы) времени ti могут быть определены двумя способами. С одной стороны, один или несколько заданных моментов времени ti могут быть предварительно заданы временно и могут быть определены при помощи устройства отсчета времени, с другой стороны, один или несколько заданных моментов времени могут быть определены как достигнутые, если амплитуда возбуждающих колебаний достигает соответствующего предварительно заданного значения.
На фиг. 2 показано схематическое изображение второго варианта осуществления способа оптимизации времени включения Кориолисова гироскопа согласно настоящему изобретению, в котором заданные моменты времени определяются как достигнутые при помощи устройства отсчета времени. В этом случае конкретные значение времени ti от i=1 до n предварительно заданы и соответствуют конкретным моментам времени в пределах и, при необходимости, также за пределами времени установления возбуждающих колебаний. Например, t1 может соответствовать моменту времени, когда амплитуда отклонения возбуждающих колебаний достигает около 10% своего значения А0 в установившемся состоянии, что может достигать, например, величины до 10 мкм. Дополнительно, предварительно заданные моменты времени ti могут, например, соответствовать моментам времени, когда амплитуда отклонения возбуждающих колебаний достигает около 50% или около 90% своего значения А0 в установившемся состоянии. Последнее значение tn может, например, соответствовать моменту времени, когда амплитуда отклонения возбуждающих колебаний достигает своего значения А0 в установившемся состоянии. В данном процессе предварительно заданные моменты времени от t1 до tn могут основываться на экспериментальных значениях или могут основываться на расчетах переходного колебательного процесса возбуждающих колебаний. Одиночные моменты времени ti могут распределяться равномерно или неравномерно по времени установления возбуждающих колебаний.
В качестве начальных значений согласно способу в соответствии с фиг. 2 на первом этапе S20 индекс i установлен равным единице и время t включения Кориолисова гироскопа установлено равным нулю. При помощи устройства отсчета времени измеряют время, прошедшее с момента t=0, то есть, с момента включения Кориолисова гироскопа, при этом измеренное время t сравнивают с предварительно заданным значением для ti, например, ti (этап S21). Когда достигнуто предварительно заданное значение ti, для данного момента времени ti определяют амплитуду A(ti), а также определяют выходной сигнал S(ti) Кориолисова гироскопа (этапы S22 и S23). На этапе S24 генерируют нормированный выходной сигнал S0(ti) и выход в соответствии с уравнением (3) на основе определенной амплитуды A(ti) и выходного сигнала S(ti). Затем i увеличивают на единицу (этап S25) и на этапе S26 выполняется проверка, достиг ли i максимального значения, равного n+1. Если это так, способ завершается на этапе S27, в противном случае этапы с S21 по S26 повторяются. В качестве устройства синхронизации, измеряющего время, можно, например, использовать часы или тактовый генератор, соединенный со счетчиком.
В качестве альтернативы измерению времени и его сравнению с предварительно заданным значением на этапе S21 можно также использовать предварительно заданные циклы тактового генератора, то есть, сигналы на момент включения, для принятия решения, достигнут заданный момент времени ti или нет. В этом случае временные интервалы между отдельно взятыми заданными моментами времени ti всегда будут одинаковыми.
На фиг. 3 схематично показан третий вариант осуществления способа оптимизации времени включения Кориолисова гироскопа согласно настоящему изобретению, в котором заданные моменты времени ti определены посредством измерения амплитуды A(t) возбуждающих колебаний. Это означает, что амплитуду A(t) возбуждающих колебаний определяют непрерывно и сравнивают с предварительно заданными значениями, при этом момент времени, когда амплитуда A(t) достигает предварительно заданного значения Ai, определяют как заданный момент времени ti.
Аналогично этапу S20 на фиг. 2, на этапе S30 индекс i вначале устанавливают равным 1, однако без необходимости определять или фиксировать время. На этапе S31 определяют амплитуду A(t), которую затем сравнивают с амплитудой А0 в установившемся состоянии возбуждающих колебаний (этап S32). Если амплитуда A(t) уже достигла значения А0, выполнение по способу завершается непосредственно на этапе S39. Если амплитуда A(t) возбуждающих колебаний еще не достигла значения А0, на этапе S33 амплитуду сравнивают с предварительно заданным значением Ai, например, с А1. Если значение Ai еще не достигнуто, этапы с S31 по S33 повторяют, пока амплитуда A(t) не достигнет значения Ai. Если на этапе S34 амплитуда A(t) достигла предварительно заданного значения Ai, время t, для которого A(t)=Ai, задают как заданное время ti, при этом время t или продолжительность на самом деле определять не обязательно. Затем на этапе S35 определяют выходной сигнал S(ti) и на этапе S36 генерируют нормированный выходной сигнал S0(ti) способом, аналогичным уже описанному в отношении этапов S23 и S24 на фиг. 2. Ниже в данном документе на этапе S37 индекс i увеличивают на единицу и на этапе S38 сравнивают со значением n+1. Если индекс i достигает значения n+1, способ завершится на этапе S39. Если значение n+1 еще не достигнуто, этапы с S31 по S38 повторяются.
Этап S38 также может быть опущен, чтобы после этапа S37 повторялись этапы с S31 до S37 до тех пор, пока на этапе S32 не будет определено, что амплитуда A(t) соответствует амплитуде А0 в установившемся состоянии. Альтернативно, этап S32 также может быть опущен, чтобы повторялись этапы S31 и с S33 по S37 до тех пор, пока не достигнуто i=n+1, при этом при необходимости амплитуда A(t) может уже достичь значения А0.
Также в способе согласно второму варианту осуществления (фиг. 2) амплитуда A(t) возбуждающих колебаний может измеряться или определяться непрерывно, то есть, не только при достижении заданного момента времени ti. Подобно этому во втором и третьем варианте осуществления способа выходной сигнал S(t) может задаваться непрерывно. Тогда можно непрерывно генерировать также нормированный выходной сигнал S0(t). В данном процессе фактор A0/A(t) нормализации можно, например, рассчитывать в заданные моменты времени ti, так что S0(t) генерируется для моментов времени t при ti<t<ti+1 фактором нормализации A0/A(ti).
В принципе, заданные моменты времени должны выбираться так, что интервал между двумя последовательными моментами времени ti и ti+1 больше или равен периодам измерения амплитуды A(t), выходного сигнала S(t) или времени t, при этом самый продолжительный период измерения является определяющим.
Согласно дополнительному варианту осуществления также возможны произвольные комбинации компонентов второго и третьего варианта осуществления. Например, один или несколько заданных моментов времени, например, первый заданный момент времени t1, может быть определен как достигнутый при помощи устройства отсчета времени, в то время как один или несколько других заданных моментов времени, например, последний заданный момент времени tn определяют посредством измеренной амплитуды A(t) и ее сравнения с предварительно заданным значением Ai.
На фиг. 4 схематично показан Кориолисов гироскоп в конкретном варианте осуществления, который подходит для осуществления способа согласно настоящему изобретению. Кориолисов гироскоп 1 содержит систему масс 100 и считывающее устройство 200, соединенное с системой масс посредством сигнальных линий 310, 320, 330.
Согласно варианту осуществления, показанному на фиг. 4, система масс 100 содержит первую частичную массу 110, которая образует возбуждающую рамку, и вторую частичную массу 120, которая служит в качестве определяющей массы. Однако функции двух частичных масс могут также реализовываться массой, состоящей из одной части. Первая частичная масса 110 закреплена на основании при помощи первых пружинных элементов 115 и может возбуждаться для колебаний вдоль первой оси (оси x) посредством неподвижных возбуждающих электродов 130, жестко соединенных с основанием, и подвижных возбуждающих электродов 135, жестко соединенных с первой частичной массой 110. Для этого на неподвижные возбуждающие электроды 130 (не показаны) подают переменное напряжение U(t). Вторая частичная масса 120 соединена с первой частичной массой 110 посредством вторых пружинных элементов 125, так что она может отклоняться в результате действия Кориолисовой силы, действующей на систему масс 100 вдоль второй оси (оси y). Вторая ось перпендикулярна первой оси. Отклонение второй частичной массы 120 можно определять посредством считываемого сигнала при помощи подвижных считывающих электродов 140, жестко соединенных со второй частичной массой 120, и фиксированных считывающих электродов 145, жестко соединенных с основанием.
В варианте осуществления, показанном на фиг. 4, неподвижные возбуждающие электроды 130 соединены с блоком 200 считывания посредством первой сигнальной линии 310, обеспечивающей возможность передачи первого сигнала V1. Первый сигнал V1 может, например, содержать амплитуду возбуждающих колебаний первой частичной массы 110.
Однако первый сигнал V1 также может быть сигналом, который позволяет определять амплитуду возбуждающих колебаний после нескольких этапов обработки. На фиг. 4 показан случай, когда создание возбуждающих колебаний, а также считывание мгновенного значения амплитуды А возбуждающих колебаний выполняется посредством одних и тех же электродов, то есть, посредством возбуждающих электродов 130 и 135. Здесь используется тот факт, что все сигналы могут накладываться.
Для ясности на фиг. 4 показано считывание только первого сигнала V1, но не функции привода, которая возбуждает колебания. В дополнение, первая сигнальная линия 310 не должна обязательно соединяться с неподвижными возбуждающими электродами 130. Например, одна или несколько отдельных пар электродов, из которых одна часть жестко соединена с основанием и другая часть жестко соединена с первой частичной массой 110, может использоваться для регистрации возбуждающих колебаний, то есть, мгновенного значения амплитуды возбуждающих колебаний, и может соединяться с сигнальной линией 310. Также возможна оптическая регистрация амплитуды возбуждающих колебаний. В каждом случае первый сигнал V1 принимается и по сигнальной линии 310 передается в считывающее устройство 200.
Кориолисов гироскоп 1 дополнительно содержит вторую сигнальную линию 320, посредством которой второй сигнал V2 может передаваться в считывающее устройство 200. В варианте осуществления, показанном на фиг. 4, вторая сигнальная линия 320 жестко соединена с неподвижными считывающими электродами 145. Однако второй сигнал V2 можно также получать посредством другого типа регистрации перемещения второй частичной массы, так что вторая сигнальная линия 320 не должна быть обязательно соединена с неподвижным считывающим электродом 145. Второй сигнал V2 является выходным сигналом Кориолисова гироскопа 1.
Дополнительно Кориолисов гироскоп может содержать одну или несколько дополнительных сигнальных линий, например, третью сигнальную линию 330, посредством которой, например, третий сигнал V3 может передаваться между блоком 200 считывания и системой масс 100. Например, третья сигнальная линия 330 может быть соединена с дополнительным электродом 150, который, например, служит для корректировки ошибок.
Согласно варианту осуществления, показанному на фиг. 5, напряжения U1(t) и U2(t) прикладывают для приведения в действие возбуждающего осциллятора и, косвенно, для регистрации его механических колебаний. Напряжения прикладывают между клеммами неподвижных возбуждающих электродов 130 и землей или между дополнительным электродом 150 и землей. Пробная масса, состоящая из электрически соединенных возбуждающих и считывающих осцилляторов, всегда сохраняет потенциальное заземление посредством электрометрического усилителя 350. Напряжения U1 и U2 прикладывают для генерации сигналов V1 и V3. Для получения сигнала V2 к соответствующим электродам 140, 145 внутри считывающего осциллятора посредством электрометрического усилителя 350 прикладывают напряжение, аналогично напряжениям U1 и U2 (не показаны).
На выходе электрометрического усилителя 350 генерируется изображение суммы всех меняющихся во времени напряжений между электродами 130, 150 и пробной массой, оцениваемых с помощью зависящих от времени емкостей. Для разделения отдельных сигналов обеспечен демультиплексор 360. Демультиплексирование может достигаться путем приложения постоянного напряжения только к предварительно заданным электродам для определения на предварительно заданных интервалах времени и путем последующего инвертирования знака напряжения. Это обеспечивает два выборочных значения, которые вычитаются друг из друга и представляют собой сопоставленную форму механического движения возбуждающих и/или считываемых колебаний.
Согласно варианту осуществления, показанному на фиг. 5, сигналы V1, и V2 и V3, таким образом, представляют собой считываемые сигналы изменений емкостей, сопоставленных с напряжениями, и, следовательно, механических перемещений.
Считывающее устройство 200 содержит первый блок 210 обнаружения, второй блок 220 обнаружения и блок 230 вывода. Первый блок 210 обнаружения выполнен с возможностью определять амплитуду A(ti) возбуждающих колебаний Кориолисова гироскопа 1 в заданный момент времени ti из первого сигнала V1. Второй блок 220 обнаружения выполнен с возможностью определять выходной сигнал S(ti) в заданный момент времени ti из второго сигнала V2. Блок 230 вывода выполнен с возможностью генерировать нормированный выходной сигнал S0(ti) Кориолисова гироскопа для определения момента времени ti путем умножения выходного сигнала S(ti), определенного вторым блоком 220 обнаружения на отношение амплитуды А0 возбуждающих колебаний в установившемся состоянии к амплитуде A(ti), определенной посредством первого блока 210 обнаружения. Это обеспечивает возможность считывающему устройству 200 Кориолисова гироскопа 1 выдавать нормированный выходной сигнал S0, который удовлетворяет техническим требованиям к достоверным данным также и во время фазы включения Кориолисова гироскопа 1.
Однако нормированный выходной сигнал S0 можно также использовать для дальнейшей обработки сигналов, окончательные результаты которой представляют собой в этом случае выходной сигнал Кориолисова гироскопа. С этой целью считывающее устройство 200 или Кориолисов гироскоп 1 может содержать дополнительные компоненты. Например, считывающее устройство 200 может содержать компоненты для компенсации температурных влияний на выходной сигнал Кориолисова гироскопа.
Как уже было описано в отношении одного способа настоящего изобретения первый блок 210 обнаружения или первый блок 210 обнаружения и второй блок 220 обнаружения могут быть сформированы таким образом, что амплитуда A(t) возбуждающих колебаний или амплитуда A(t) и выходной сигнал S(t) определяют непрерывно. Тогда амплитуду A(t), а также выходной сигнал S(t) можно передавать непрерывно на блок 230 вывода и обрабатывать в нем. Однако также возможно, что только значения амплитуды A(ti) и выходного сигнала S(ti) в заданный момент времени ti передаются и обрабатываются блоком 230 вывода.
Как описано в отношении второго и третьего варианта осуществления способа согласно настоящему изобретению заданные моменты времени ti могут задаваться как достигнутые посредством устройства отсчета времени или при достижении предварительно заданного значения Ai амплитуды A(t). Вследствие этого считывающее устройство 200 может дополнительно содержать устройство 240 отсчета времени, например, часы или тактовый генератор и/или блок 215 сравнения.
В этом случае устройство 240 отсчета времени определяет время t как заданный момент времени ti, если продолжительность достигла предварительно заданного значения или если опознан сигнал часов. Тогда заданные моменты времени ti не зависят от измеренной амплитуды A(t) возбуждающих колебаний. Если заданный момент времени ti опознан или задан устройством 240 отсчета времени как достигнутый, устройство 240 отсчета времени даст команду первому блоку 210 обнаружения определить амплитуду A(ti) и даст команду второму блоку 220 обнаружения определить выходной сигнал S(ti).
Хотя в вариантах осуществления, показанных на фиг. 4 и 5, считывающее устройство 200 содержит устройство 240 отсчета времени, временно заданный сигнал для определения амплитуды A(ti) и выходной сигнал S(ti) могут также генерироваться компонентом за пределами считывающего устройства 200 или даже за пределами Кориолисова гироскопа 1 и могут передаваться первому блоку 210 обнаружения и второму блоку 220 обнаружения.
Блок 215 сравнения служит для сравнения амплитуды A(t) возбуждающих колебаний, непрерывно определяемой при помощи первого блока 210 обнаружения, с предварительно заданным значением Ai. Если блок 215 сравнения опознает, что предварительно заданное значение Ai достигнуто, соответствующее время будет опознано или задано как заданный момент времени ti и второму блоку 220 обнаружения будет дана команда определить выходной сигнал S(ti). Значение A(t)=A(ti)=Ai далее передается в блок 230 вывода и используется для генерирования нормированного выходного сигнала S0(ti), как описано.
На фиг. 4 и 5 блок 215 сравнения показан в качестве компонента первого блока 210 обнаружения. Однако блок 215 сравнения может также располагаться за пределами первого блока 210 обнаружения, за пределами считывающего устройства 200 или даже за пределами Кориолисова гироскопа 1, в случае если он подходит для того, чтобы заставить первый блок 210 обнаружения передать значения A(ti) амплитуды блоку 230 вывода и заставить второй блок 220 обнаружения определить значения выходного сигнала S(ti) и передать данное значение блоку 230 вывода.
Способ согласно настоящему изобретению и Кориолисов гироскоп, подходящий для него, обеспечивает возможность оценки качества масштабного коэффициента или выходного сигнала Кориолисова гироскопа уже во время включения Кориолисова гироскопа. Это позволяет оценить, можно ли достичь желаемого значения масштабного коэффициента при нормальной работе, то есть, при установившемся состоянии возбуждающих колебаний, и, следовательно, будет ли Кориолисов гироскоп удовлетворять техническим требованиям и работать, как требуется. Соответственно, нет необходимости ждать момента времени наихудшего случая, чтобы решить, является ли выходной сигнал Кориолисова гироскопа достаточно точным. Это приводит к значительному снижению времени включения Кориолисова гироскопа, например, с коэффициентом 100. Дополнительно, способ и компоненты Кориолисова гироскопа, необходимого для него, могут быть легко реализованы и могут объединяться с другими мероприятиями по оптимизации времени включения.
Предложен способ для определения факта выхода гироскопа на установившийся режим работы, позволяющий его использовать для достоверных измерений, и устройство для реализации данного способа. Заявленный способ оптимизации времени включения Кориолисова гироскопа заключается в том, что система масс указанного гироскопа приводится в состояние возбуждающих колебаний параллельно первой оси (х), причем отклонение системы масс в результате действия Кориолисовой силы вдоль второй оси (y), заданной перпендикулярно первой оси (х), проверяют с использованием выходного сигнала Кориолисова гироскопа, содержащего определение амплитуды (А) возбуждающих колебаний Кориолисова гироскопа в заданный момент времени, и генеририруют нормированный выходной сигнал (S0) от Кориолисова гироскопа путем умножения определенного выходного сигнала (S) на отношение амплитуды (А0) возбуждающих колебаний Кориолисова гироскопа в установившемся состоянии к определенной амплитуде (А), на основании которого судят о выходе гироскопа на установившийся режим работы, и тем самым оптимизируют процесс использования гироскопа с момента его включения. Указанный способ реализуется при помощи соответствующего устройства, включающего в себя специальные электронные блоки. Данная группа изобретений позволяет более оптимально использовать Кориолисов гироскоп, начиная с момента его включения. 2 н. и 7 з.п. ф-лы, 5 ил.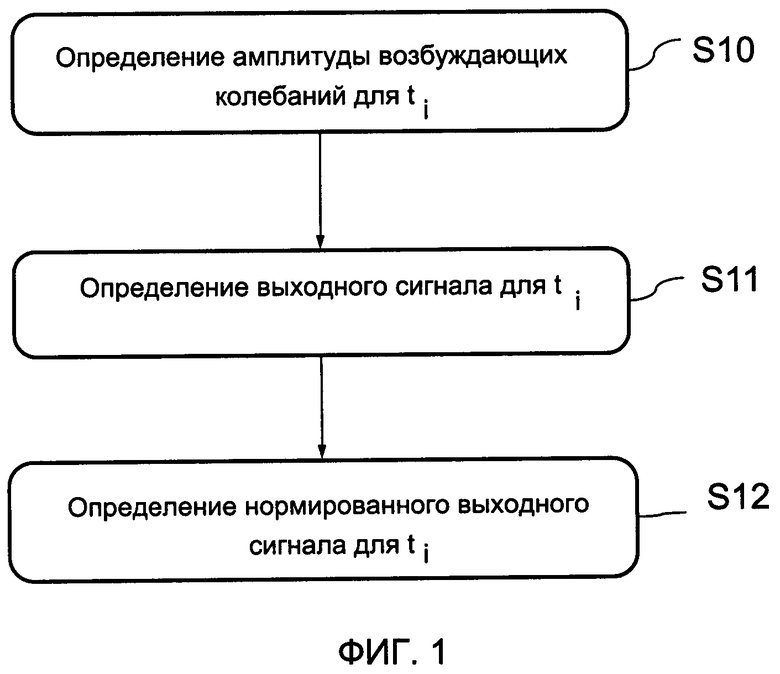
1. Способ оптимизации времени включения Кориолисова гироскопа (1), имеющего систему (100) масс, приводимую в состояние возбуждающих колебаний Кориолисова гироскопа (1) параллельно первой оси (х), причем отклонение системы масс в результате действия Кориолисовой силы вдоль второй оси (y), заданной перпендикулярно первой оси (х), проверяемо с использованием выходного сигнала (S) Кориолисова гироскопа (1), включающий:
определение амплитуды (А) возбуждающих колебаний Кориолисова гироскопа (1) в заданный момент времени (ti),
определение выходного сигнала (S) Кориолисова гироскопа (1) в заданный момент времени (ti) и
генерирование нормированного выходного сигнала (S0) Кориолисова гироскопа (1) путем умножения определенного выходного сигнала (S) на отношение амплитуды (А0) возбуждающих колебаний Кориолисова гироскопа (1) в установившемся состоянии к определенной амплитуде (А).
2. Способ по п. 1, дополнительно включающий
повторение этапов для определения амплитуды (А), для определения выходного сигнала (S) и для генерирования нормированного выходного сигнала (S0) для по меньшей мере одного дополнительно заданного момента времени (ti+1).
3. Способ по п. 1 или 2,
отличающийся тем, что
по меньшей мере один из заданных моментов времени (ti, ti+1) определяют как достигнутый при помощи устройства (240) отсчета времени.
4. Способ по п. 1 или 2,
отличающийся тем, что
амплитуду (А) возбуждающих колебаний Кориолисова гироскопа (1) определяют непрерывно и
по меньшей мере один из заданных моментов времени (ti, ti+1) определяют как достигнутый, когда определенная амплитуда (А) возбуждающих колебаний достигает соответствующего предварительно заданного значения (Ai, Ai+1).
5. Способ по п. 4,
отличающийся тем, что
способ завершают, когда определенная амплитуда (А) соответствует амплитуде (А0) возбуждающих колебаний Кориолисова гироскопа (1) в установившемся состоянии.
6. Способ согласно одному из предшествующих пунктов,
отличающийся тем, что
способ завершают после достижения предварительно заданного момента времени (tn).
7. Кориолисов гироскоп (1) содержит:
систему (100) масс, приводимую в состояние возбуждающих колебаний Кориолисова гироскопа (1) параллельно первой оси (х), причем отклонение системы масс в результате действия Кориолисовой силы вдоль второй оси (y), заданной перпендикулярно первой оси (х), проверяемо с использованием выходного сигнала (S) Кориолисова гироскопа (1), и
считывающее устройство (200), содержащее первый блок (210) обнаружения, второй блок (220) обнаружения и блок (230) вывода, и в котором
первый блок (210) обнаружения выполнен с возможностью определять амплитуду (А) возбуждающих колебаний Кориолисова гироскопа (1) в заданный момент времени (ti),
второй блок (220) обнаружения выполнен с возможностью определять выходной сигнал (S) Кориолисова гироскопа (1) в заданный момент времени (ti), и
блок (230) вывода выполнен с возможностью генерировать нормированный выходной сигнал (S0) Кориолисова гироскопа (1) путем умножения определенного выходного сигнала (S) на отношение амплитуды (А0) возбуждающих колебаний Кориолисова гироскопа (1) в установившемся состоянии к определенной амплитуде (А).
8. Кориолисов гироскоп (1) по п. 7, дополнительно содержащий:
устройство отсчета времени (240), выполненное с возможностью задавать заданное время (ti) как достигнутое или инициировать определение амплитуды (А) возбуждающих колебаний и выходного сигнала (S) Кориолисова гироскопа (1) в заданный момент времени (ti).
9. Кориолисов гироскоп (1) по п. 7 или 8, дополнительно содержащий:
блок (215) сравнения, выполненный с возможностью сравнения определенной амплитуды (А) с предварительно заданным значением.
| ГАЕЧНЫЙ КЛЮЧ | 1993 |
|
RU2060871C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| DE 102005034702 A1, 01.02.2007 | |||
| Кран к аппарату для газирования жидкостей | 1928 |
|
SU20013A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2383863C1 |
| СПОСОБ НАСТРОЙКИ БЛОКА ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ, СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДРЕЙФА ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЯ КОЛЕБАТЕЛЬНОСТИ И ПОЛОСЫ ПРОПУСКАНИЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА ДАТЧИКА УГЛОВОЙ СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ЮСТИРОВКИ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269747C1 |

