Изобретение относится к авиационной технике, а именно к шасси летательных аппаратов.
Из патента RU 2567496 С1 (опубл. 10.11.2015) известен многовинтовой беспилотный летательный аппарат вертикального взлета и посадки, имеющий амортизированное посадочное лыжеобразное шасси, упругие пластинчатые дуги, выполненные из пружинной стали.
Из патента RU 130955 U1 (опубл. 10.08.2013) известен беспилотный летательный аппарат, включающий опорную раму, к которой снизу жестко присоединены кольцевой обтекатель, а также двигатель с движителем в виде вентилятора, а стойки шасси закреплены по периметру опорной рамы. Причем так как основные нагрузки при посадке аппарата 1 принимают на себя стойки 6 шасси, эти нагрузки не передаются на обтекатель 4 и на двигатель 3 с вентилятором 5, что позволяет обеспечить защиту от ударов. При этом рама 2 выполняется прочной и способной выдержать нагрузки как от работы двигателя 3, так и от ускорений, возникающих при посадке. Рама 2 может быть в форме креста на виде сверху Фиг. 2, к концам которой крепятся стойки 6. В общем случае рама 2 имеет центральную часть и «лучи», к которым крепятся стойки шасси 6. Рама 2 может изготавливаться из металла или композитного углепластика. Так как к раме 2 крепятся все основные узлы конструкции аппарата, в частности кольцевой обтекатель 4, стойки шасси 6, контейнер 9 с бортовой аппаратурой, прикрепленный через амортизаторы 10, то количество креплений всех этих элементов конструкции к раме будет определяться количеством «лучей» рамы.
Из патента RU 2395429 С1 известен винтокрылый летательный аппарат, содержащий фюзеляж и полозковое шасси, имеющее полозы, соединенные первым поперечным элементом и вторым поперечным элементом, первые и вторые соединительные средства, предназначенные для соединения первого поперечного элемента с фюзеляжем, и одно центральное третье соединительное средство, расположенное для передачи усилий от второго поперечного элемента к фюзеляжу и, наоборот, отличающийся тем, что указанные первые соединительные средства содержат две первые части, предназначенные для размещения на первом поперечном элементе и для опоры на него, причем указанные первые соединительные средства активно передают усилия от первого поперечного элемента к фюзеляжу до тех пор, пока деформация первого поперечного элемента остается меньше определенного уровня деформации при перекатывании или вертикальной осадке; и указанные вторые соединительные средства содержат две вторые части, предназначенные для размещения на первом поперечном элементе и для опоры на него тогда, когда указанный определенный уровень деформации поперечного элемента достигнут или превышен, причем указанные вторые соединительные средства проходят вне указанных первых частей на обеих сторонах и становятся активными только тогда, когда деформация первого поперечного элемента достигает или превышает определенный уровень деформации.
Эти решения требуют повышенной жесткости аппарата, который работает в условиях динамических нагрузок, особенно при посадке аппарата на определенную местность, ограниченную плоским рельефом, что при таких конструктивных схемах приводит к большей материалоемкости аппаратов, что влияет на их эксплуатационные качества.
Технический результат, достигаемый при реализации заявленной группы изобретений, заключается в создании такой конструкции шасси для летательного аппарата вертикального взлета и посадки, при которой достигается:
упрощение конструкции и уменьшение веса летательного аппарата, для адаптивного шасси по п.п. 1 и 3 - обеспечивается посадка на наклонную нестабильную поверхность, сохраняя при этом горизонтальное положение летательного аппарата относительно линии горизонта. Например, при посадке на палубу корабля во время плавания, при этом сохраняя горизонтальное положение летательного аппарата относительно линии горизонта;
для адаптивного шасси по пп. 2 и 4 обеспечивается посадка на неподготовленную поверхность, в частности на пересеченную местность с допустимым перепадом высот, при этом сохраняя горизонтальное положение летательного аппарата относительно линии горизонта;
а также в обеспечении улучшенных эксплуатационных качеств летательного аппарата за счет упрощения конструкции и уменьшения веса летательного аппарата, а также в обеспечении универсальности посадочных условий для летательного аппарата, в частности для летательного аппарата вертикального взлета и посадки, с учетом применения заявленных вариантов шасси.
Указанный технический результат достигается следующим образом.
По первому варианту применяется заявленное адаптивное шасси летательного аппарата вертикального взлета и посадки, содержащее две дугообразные стойки, причем место крепления дугообразных стоек к корпусу летательного аппарата центрируется с точкой пересечения дугообразных стоек и вертикальной оси, проходящей через центр масс летального аппарата, причем угол пересечения дугообразных стоек составляет 90 градусов, при этом каждая дугообразная стойка снабжена приводом, связанным с блоком управления (контроллером) и гироскопом, при этом привод обеспечивает варьирование и регулировку рабочей длины дугообразной стойки.
Во втором варианте адаптивное шасси летательного аппарата содержит как минимум четыре дугообразные полустойки, причем место крепления дугообразных полустоек к корпусу летательного аппарата центрируется с точкой пересечения дугообразных полустоек и вертикальной оси, проходящей через центр масс летального аппарата, причем угол пересечения дугообразных полустоек составляет 90 градусов, при этом каждая дугообразная полустойка снабжена приводом, связанным с блоком управления (контроллером) и гироскопом, при этом каждый привод обеспечивает варьирование и регулировку рабочей длины каждой дугообразной полустойки.
В третьем варианте адаптивное шасси летательного аппарата содержит две дугообразные стойки, причем место крепления дугообразных стоек к корпусу летательного аппарата центрируется с точкой пересечения дугообразных стоек и вертикальной оси, проходящей через центр масс летального аппарата, причем угол пересечения дугообразных стоек составляет 90 градусов, при этом каждая дугообразная стойка снабжена приводом, связанным с блоком управления (контроллером) и гироскопом, а также снабженное 3D-сканером поверхности посадочной площадки, при этом привод обеспечивает варьирование и регулировку рабочей длины дугообразной стойки в соответствии с информацией, полученной от 3D-сканера поверхности посадочной площадки еще до момента приземления, причем каждая стойка снабжена опорой, включающей опорный элемент с плавающим креплением к стойке, при этом материал, из которого выполнен опорный элемент, обеспечивает максимальное сцепление опорного элемента с поверхностью.
В четвертом варианте адаптивное шасси летательного аппарата содержит как минимум четыре дугообразные полустойки, причем место крепления дугообразных полустоек к корпусу летательного аппарата центрируется с точкой пересечения дугообразных полустоек и вертикальной оси, проходящей через центр масс летального аппарата, причем угол пересечения дугообразных полустоек составляет 90 градусов, при этом каждая дугообразная полустойка снабжена приводом, связанным с блоком управления (контроллером) и гироскопом, а также снабженное 3D-сканером поверхности посадочной площадки, при этом каждый привод обеспечивает варьирование и регулировку рабочей длины каждой дугообразной полустойки в соответствии с информацией, полученной от 3D-сканера поверхности посадочной площадки еще до момента приземления,
причем каждая полустойка снабжена опорой, включающей опорный элемент с плавающим креплением к полустойке, при этом материал, из которого выполнен опорный элемент, обеспечивает максимальное сцепление опорного элемента с поверхностью.
Заявленный летательный аппарат содержит адаптивное шасси в соответствии с любым из заявленных вариантов. Также вышеуказанные адаптивные шасси применяются в летательном аппарате вертикального взлета и посадки. Также для обеспечения устойчивого положения (стабильного положения) фюселяжа летательного аппарата относительно линии горизонта на корпусе обеспечены направляющие.
Заявленный способ посадки и взлета летального аппарата содержит адаптивное шасси в соответствии с любым из заявленных вариантов, при котором адаптивное шасси самонастраивается посредством приводов и блока управления (контроллера) в соответствии с рельефом поверхности и динамикой движения мобильной посадочной площадки еще до момента приземления.
Сущность предлагаемого изобретения заключается в том, чтобы обеспечить улучшенные эксплуатационные качества летательного аппарата за счет упрощения конструкции и уменьшения веса летательного аппарата, а также в обеспечении универсальности посадочных условий для летательного аппарата вертикального взлета и посадки с учетом применения заявленных вариантов шасси.
Составные части и устройства адаптивного шасси летательного аппарата схематично представлены на следующих чертежах:
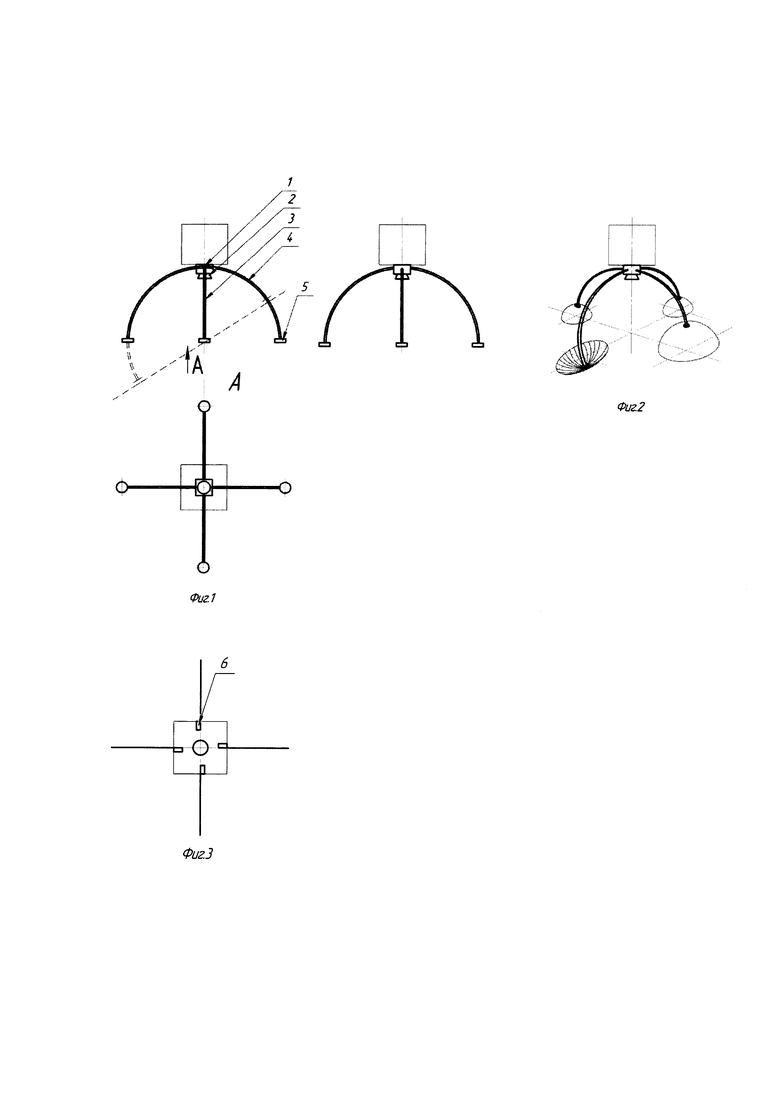
На фиг. 1 изображен общий вид летательного аппарата, а также вариант варьирования рабочей длины дугообразных стоек/полустоек при посадке на наклонную нестабильную поверхность, при этом летательный аппарат сохраняет горизонтальное положение относительно линии горизонта. Например, при посадке на палубу корабля во время плавания, при этом сохраняя горизонтальное положение летательного аппарата относительно линии горизонта.
На фиг. 2 изображен вариант посадки летательного аппарата с заявленным в соответствии с вариантами изобретения адаптивным шасси на неподготовленную поверхность, в частности на пересеченную местность с допустимым перепадом высот, при этом летательный аппарат сохраняет горизонтальное положение относительно линии горизонта.
На фиг. 3 изображен схематичный вариант расположения приводов для варьирования рабочей длины стоек/полустоек.
На чертежах обозначены:
1 - внешний корпус для расположения приводов;
2 - 3D-сканер поверхности посадочной площадки;
3 - дугообразные стойки/полустойки;
4 - дугообразные стойки/полустойки;
5 - опора, имеющая конфигурацию, включающую плавающий опорный элемент и плавающие крепления к стойке;
6 - приводы.
Конструкция заявленных вариантов адаптивного шасси подразумевает вариации посадки на те типы поверхностей, которые не обеспечены существующими вариантами шасси летательных аппаратов. Так, существует необходимость обеспечить возможность посадки на наклонную ровную поверхность, такую как палуба корабля, которая во время движения корабля имеет нестатичное положение и может иметь наклон под разными углами в зависимости от погодных условий. Также существует необходимость посадки летальных аппаратов на поверхность, обладающую рельефом, на котором могут быть кочки или впадина. Заявленное шасси разработано таким образом, что с помощью конструкции обеспечивает возможность посадки на любую из вышеперечисленных поверхностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для фиксации и удержания летательного аппарата на ферромагнитных поверхностях | 2017 |
|
RU2681610C1 |
| СПОСОБ ПРИЧАЛИВАНИЯ ДИРИЖАБЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2840302C1 |
| МОТОРНЫЙ САМОЛЕТ С КОМБИНИРОВАННОЙ ГИДРОДИНАМИЧЕСКОЙ И АЭРОДИНАМИЧЕСКОЙ КОНСТРУКЦИЕЙ ДЛЯ ВЗЛЕТА И ПОСАДКИ НА ВОДЕ, ГРУНТЕ ИЛИ СНЕГУ | 2007 |
|
RU2431584C2 |
| КАРКАС ДИСКООБРАЗНОГО ДИРИЖАБЛЯ И ДИРИЖАБЛЬ, СОДЕРЖАЩИЙ ТАКОЙ КАРКАС | 2023 |
|
RU2820177C1 |
| Устройство летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2657642C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
| АКВААЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2626418C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-КОНВЕРТОПЛАН-АМФИБИЯ (ВАРИАНТЫ) | 2005 |
|
RU2312795C2 |
Изобретение относится к авиационной технике и касается шасси для летательного аппарата (ЛА) вертикального взлета, совершающего посадку на неподготовленную поверхность или палубу корабля. Адаптивное шасси ЛА содержит две дугообразные стойки или четыре полустойки, причем место крепления дугообразных стоек к корпусу ЛА центрируется с точкой пересечения дугообразных стоек и вертикальной оси, проходящей через центр масс ЛА, при этом каждая дугообразная стойка снабжена приводом, связанным с блоком управления и гироскопом, а также снабженные 3D-сканером поверхности посадочные площадки. При этом привод обеспечивает регулировку длины дугообразной стойки в соответствии с информацией, полученной от 3D-сканера поверхности посадочной площадки еще до момента приземления. Каждая стойка снабжена опорой, включающей опорный элемент с плавающим креплением к стойке. Причем материал, из которого выполнен опорный элемент, обеспечивает максимальное сцепление опорного элемента с поверхностью. Достигается упрощение конструкции, уменьшение веса, сохранение горизонтального положения ЛА относительно линии горизонта при посадке на неподготовленную поверхность (пересеченную местность с перепадом высот) или палубу корабля. 6 н. и 1 з.п. ф-лы, 3 ил.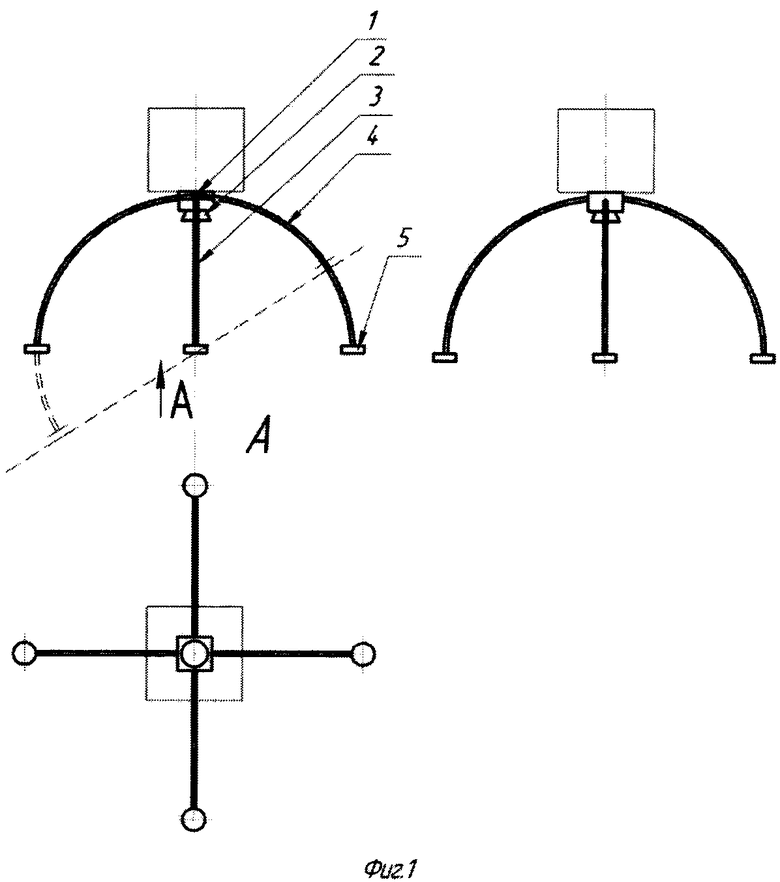
1. Адаптивное шасси летательного аппарата, содержащее две дугообразные стойки, причем место крепления дугообразных стоек к корпусу летательного аппарата центрируется с точкой пересечения дугообразных стоек и вертикальной оси, проходящей через центр масс летального аппарата, причем угол пересечения дугообразных стоек составляет 90 градусов, при этом каждая дугообразная стойка снабжена приводом, связанным с блоком управления и гироскопом, при этом привод обеспечивает варьирование и регулировку рабочей длины дугообразной стойки.
2. Адаптивное шасси летательного аппарата, содержащее как минимум четыре дугообразные полустойки, причем место крепления дугообразных стоек к корпусу летательного аппарата центрируется с точкой пересечения дугообразных полустоек и вертикальной оси, проходящей через центр масс летального аппарата, причем угол пересечения дугообразных полустоек составляет 90 градусов, при этом каждая дугообразная полустойка снабжена приводом, связанным с блоком управления и гироскопом, при этом каждый привод обеспечивает варьирование и регулировку рабочей длины каждой дугообразной полустойки.
3. Адаптивное шасси летательного аппарата, содержащее две дугообразные стойки, причем место крепления дугообразных стоек к корпусу летательного аппарата центрируется с точкой пересечения дугообразных стоек и вертикальной оси, проходящей через центр масс летального аппарата, причем угол пересечения дугообразных стоек составляет 90 градусов, при этом каждая дугообразная стойка снабжена приводом, связанным с блоком управления и гироскопом, а также снабженные 3D-сканером поверхности посадочные площадки, при этом привод обеспечивает регулировку длины дугообразной стойки в соответствии с информацией, полученной от 3D-сканера поверхности посадочной площадки еще до момента приземления, причем каждая стойка снабжена опорой, включающей опорный элемент с плавающим креплением к стойке, при этом материал, из которого выполнен опорный элемент, обеспечивает максимальное сцепление опорного элемента с поверхностью.
4. Адаптивное шасси летательного аппарата, содержащее как минимум четыре дугообразные полустойки, причем место крепления дугообразных полустоек к корпусу летательного аппарата центрируется с точкой пересечения дугообразных полустоек и вертикальной оси, проходящей через центр масс летального аппарата, причем угол пересечения дугообразных полустоек составляет 90 градусов, при этом каждая дугообразная полустойка снабжена приводом, связанным с блоком управления и гироскопом, а также снабженные 3D-сканером поверхности посадочные площадки, при этом каждый привод обеспечивает варьирование и регулировку рабочей длины каждой дугообразной полустойки в соответствии с информацией, полученной от 3D-сканера поверхности посадочной площадки еще до момента приземления, причем каждая полустойка снабжена опорой, включающей опорный элемент с плавающим креплением к полустойке, при этом материал, из которого выполнен опорный элемент, обеспечивает максимальное сцепление опорного элемента с поверхностью.
5. Летательный аппарат, содержащий адаптивное шасси в соответствии с пп. 1-4.
6. Летательный аппарат по п.5, в котором для обеспечения устойчивости (стабильного положения) фюзеляжа летательного аппарата относительно шасси на корпусе обеспечены направляющие.
7. Способ посадки и взлета летального аппарата по п.5, содержащего адаптивное шасси по пп. 1-4, при котором адаптивное шасси самонастраивается посредством приводов и блока управления (контроллера) в соответствии с рельефом поверхности и динамикой движения мобильной посадочной площадки еще до момента приземления.
| US 20160272308 A1, 22.09.2016 | |||
| ШАССИ (ВАРИАНТЫ) | 2006 |
|
RU2356794C2 |
| ВЕРТОЛЕТ | 1990 |
|
RU2030328C1 |
| US 2927747 A, 08.03.1960 | |||
| US 3208707 A, 28.09.1965 | |||
| БРОНЕБОЙНЫЙ БОЕПРИПАС | 2019 |
|
RU2712855C1 |

