Изобретение относится к области гидроакустики и может быть использовано для оценки технических параметров подводного объекта на гидроакустическом полигоне.
Известен способ аналогичного назначения, заключающийся в размещении на полигоне гидроакустического рабочего средства измерения (РСИ), обеспечении движения по прямолинейной траектории испытуемого подводного объекта, с равномерной скоростью относительно рабочего средства измерений, приеме рабочим средством измерений доплеровского сигнала от движущегося подводного объекта и последующей обработке принятого доплеровского сигнала, в результате которой определяют время-частотные распределения составляющих спектра излучения движущегося подводного объекта /RU 2284484, кл. G01H 3/10, 2006/.
Данный способ принят за прототип.
В прототипе в спектре излучения подводного объекта выделяют стабильную по частоте дискретную составляющую ƒ0 и на выделенной дискретной составляющей измеряют распределение доплеровских частот ƒ(t) во времени t, определяют значение скорости подводного объекта и траверзное расстояние от подводного объекта до РСИ.
Недостатком прототипа является невозможность с его помощью проведения исследований отражательных способностей подводного объекта.
Техническим результатом, получаемым от внедрения изобретения, является устранение данного недостатка прототипа, т.е. получение возможности оценки уровня отражения тонального акустического сигнала от корпуса подводного объекта.
Данный технический результат достигается за счет того, что в известном доплеровском способе оценки технических параметров подводного объекта на гидроакустическом полигоне, заключающемся в размещении на полигоне гидроакустического рабочего средства измерений, обеспечения движения по прямолинейной траектории испытуемого подводного объекта, с равномерной скоростью относительно рабочего средства измерений, приеме рабочим средством измерений доплеровского сигнала от движущегося подводного объекта и последующей обработке принятого доплеровского сигнала, в результате которой определяют время-частотные распределения движущегося подводного объекта, испытуемый подводный объект облучают акустической волной на фиксированной частоте, а прием доплеровского сигнала рабочим средством измерений проводят в отраженном от подводного объекта излучении, при последующей оценке уровней отражения тонального сигнала от корпуса подводного объекта.
Изобретение поясняется чертежами.
На фиг. 1 и 2 представлены схемы измерения вторичных физических полей для пояснения существа предложенного способа; на фиг. 3 представлена частотно-временная диаграмма для пояснения существующего способа; на фиг. 4 - частотно-временная диаграмма для пояснения работы предложенного способа.
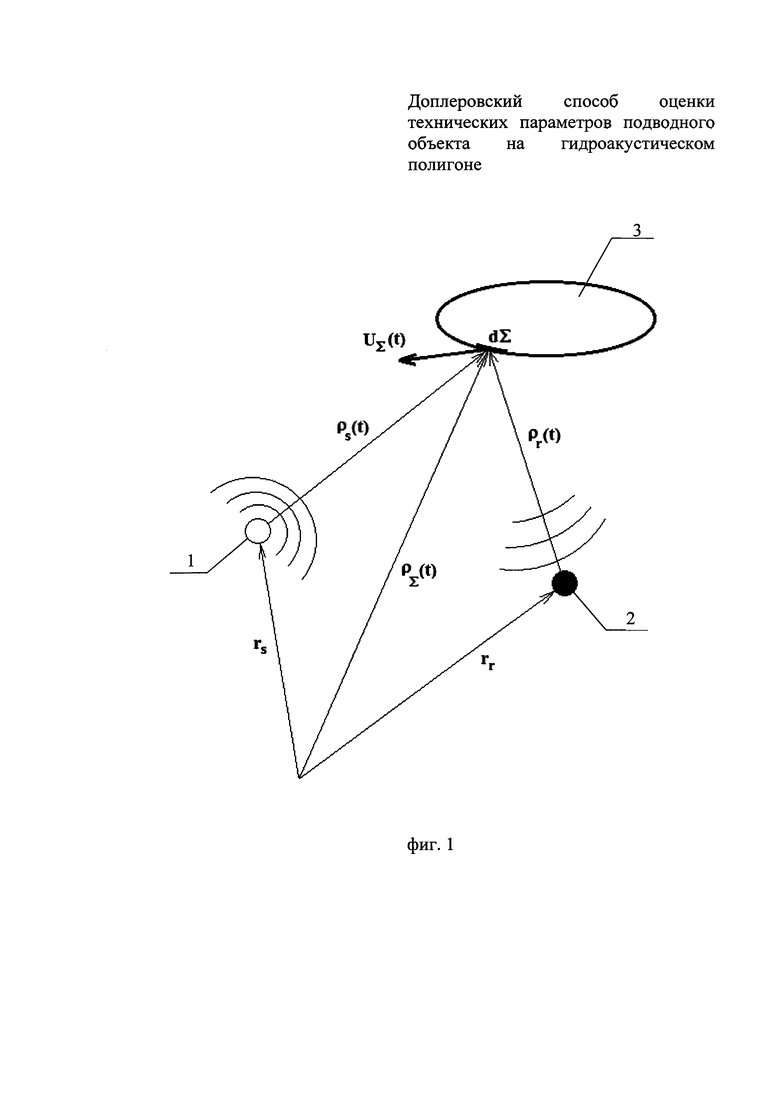
Схема измерения параметров вторичных физических полей (фиг. 1) основана на следующем физическом явлении. Пусть в морской среде, в которой в фиксированных точках расположены источник 1 и приемник 2 звуковых волн, движется некоторый подводный объект 3.
Источник 1 (изображен светлым кружком) и приемник 2 (темный кружок) расположены в точках rs, и rγ соответственно. Источник непрерывно на фиксированной частоте ƒ0 излучает звуковую волну, которая, отразившись от движущегося объекта 3, попадает на приемник 2. Во время своего движения объект 3 создает в окружающем его пространстве поле скорости V(r,t), которое описывает обтекающий его поток жидкости.
Пусть некоторая часть принимаемой волны отразилась в момент времени t от малого элемента dΣ поверхности объекта 3, координаты которого задаются радиус-вектором ρΣ(t). Скорость этого элемента описывается величиной UΣ(t)=dρΣ(t)/dt.
В целях дальнейшего изложения вводятся три скалярных числа Маха, характеризующих рассматриваемую ситуацию:  - число Маха обтекающего объект потока,
- число Маха обтекающего объект потока,  - число Маха отражающего элемента,
- число Маха отражающего элемента,  - акустическое число Маха. Здесь с - скорость звука в морской среде, max|va(r,t)| - максимальное значение колебательной скорости акустической волны, создаваемой в пространстве источником излучения.
- акустическое число Маха. Здесь с - скорость звука в морской среде, max|va(r,t)| - максимальное значение колебательной скорости акустической волны, создаваемой в пространстве источником излучения.
При этом выполнены следующие условия:
1. Ma, MU, MV<<1, что означает справедливость использования линейных моделей при описании проявляющихся в рассматриваемой ситуации акустико-гидродинамических явлений.
2. Mv<<Ма при r=rs,rγ, что означает пренебрежимую малость потока обтекания объекта в точках, где расположены излучатель и приемник.
3. Постоянство во времени и пространстве скорости звука с морской среды.
4. Неизменность во времени реологических характеристик (то есть упруго-пластичных свойств) элемента поверхности dΣ.
Тогда частота сигнала, отраженного от элемента dΣ, в момент времени t и пришедшего на приемник, определяется выражением

и описывает эффект Доплера, возникающий при отражении звуковой волны от движущегося отражающего элемента при неподвижных источнике и приемнике.
Полный отраженный сигнал, поступающий на приемник, представляет собой интеграл по всей поверхности Σ рассеивающего объекта. Отраженные сигналы от разных элементов dΣ, поверхности поступают на приемник с разными частотами и различными временными задержками. Но если за время прохода объекта максимальная скорость его элементов поверхности ограничена некоторой величиной  , то во все моменты времени спектр отраженного сигнала, пришедшего на приемник, будет заключен в пределах
, то во все моменты времени спектр отраженного сигнала, пришедшего на приемник, будет заключен в пределах

С учетом того, что, как уже обусловливалось выше, U/c<<1, соотношение (2) допускает приближенную запись

Таким образом, спектр сигнала, поступающего на приемник, заведомо лежит в пределах, определяемых соотношением (3).
Помимо отраженного от объекта сигнала, на приемник поступает прямой сигнал от излучателя, частота которого неизменна и равна ƒ0. Если полный сигнал, поступивший на приемник, подвергнуть полосовой фильтрации с центральной частотой полосы ƒ0 и шириной  , то на выходе приемного тракта сформируется сигнал, обусловленный только отражением от движущегося объекта, спектр которого лежит в пределах
, то на выходе приемного тракта сформируется сигнал, обусловленный только отражением от движущегося объекта, спектр которого лежит в пределах

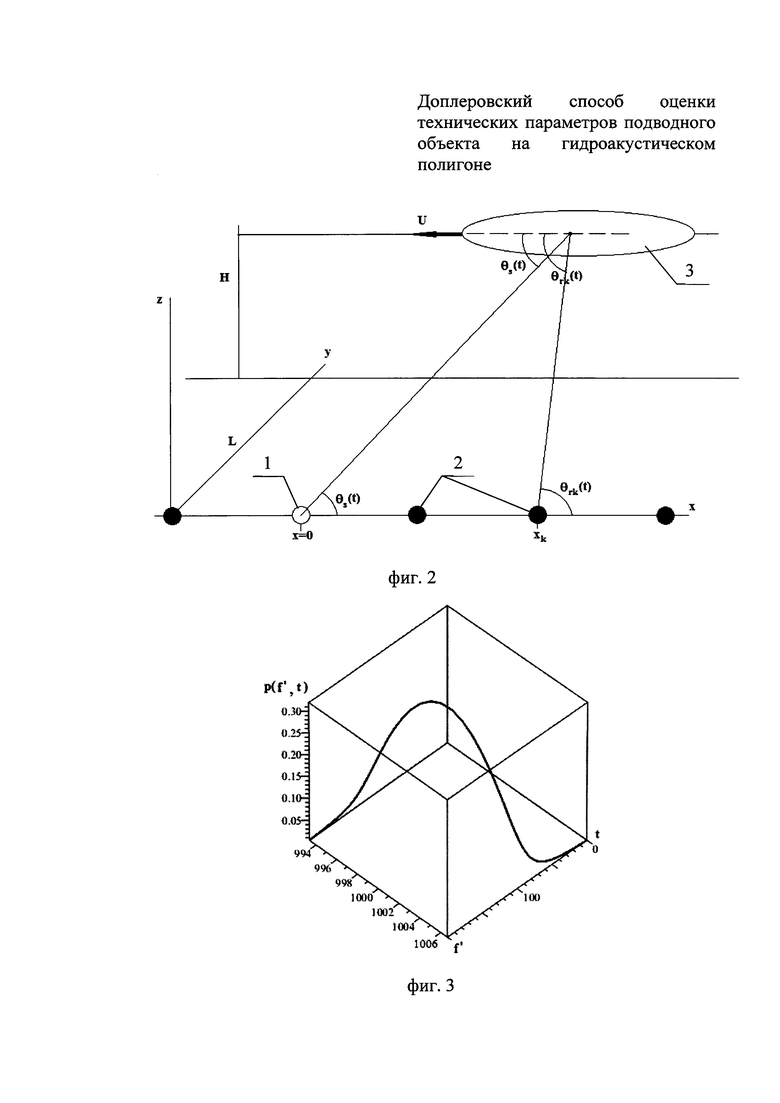
На изложенных выше физических свойствах приема отраженного сигнала от движущегося объекта 3 с использованием эффекта Доплера основана схема измерения параметров вторичных полей, приведенная на фиг. 2.
Если бы отражатель представлял собой малую плоскую пластину, движущуюся вдоль направления оси x со скоростью u=-Uex, то частота ƒ' сигнала, пришедшего на k-тый приемник, оказалось бы связанной с частотой излученного сигнала ƒ0 соотношением

Так как отражающий объект находится в движении, то углы θs и θrk являются функциями времени. В системе отчета времени, связанный с часами, расположенными на отражающем объекте, в каждый момент времени ракурсное положение определяется соотношением

где x(t)=х0-Ut, где x0 - положение отражателя в момент времени t=0.
Подстановка (6) в (5) определяет частоту отраженного сигнала на приемнике соотношением

представляющим собой известную функцию времени при известных параметрах движения отражателя.
Учет радиального ослабления сигнала в рамках модели сферической волны позволяет в грубом приближении определить вклад в принимаемое давление на частоте ƒ' выражением

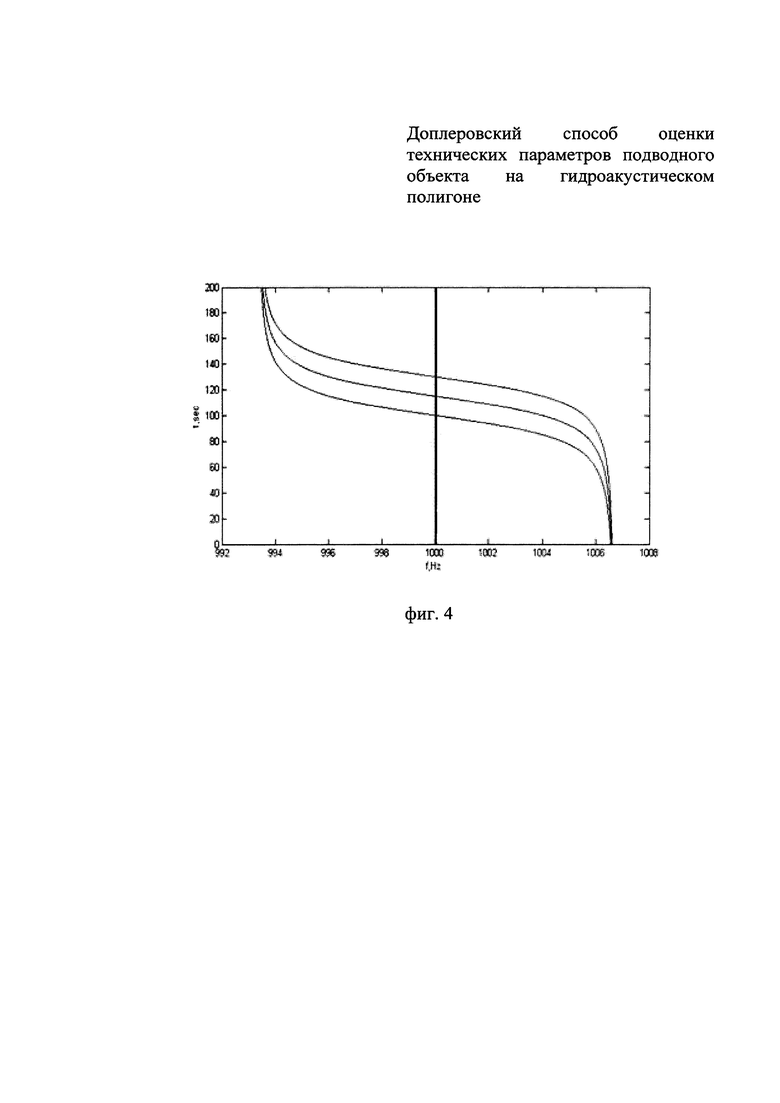
На фиг. 3 представлен сигнал на приемнике, как функция времени и (соответствующей этому времени) частоты ƒ'. Вычисления проводились по формулам (7, 8) для H=50 м, L=0, xr=-50 м, x0=500 м, U=5 м/c во временном диапазоне t∈[0...200 с]. Частота излучения ƒ0=1000 Гц.
Полученная временно-частотная зависимость позволяет с помощью фильтрации в узкой полосе, окружающей частоту ƒ0 излучателя, отстроиться от прямого сигнала, приходящего на приемник, и, как результат, измерять характеристики вторичных акустических полей, отраженных от исследуемого объекта.
Приведенные оценочные результаты получены для модели отражателя малых геометрических размеров.
Способ реализуется следующим образом.
Испытуемый подводный объект 3 движется по прямолинейной траектории с равномерной скоростью курсом к РСИ 2 (фиг. 2).
При этом испытуемый подводный объект 3 облучают акустической волной на фиксированной частоте ƒ0 при помощи излучателя 1, и осуществляют прием доплеровского сигнала РСИ 2 в отраженном от корпуса подводного объекта 3 излучения.
На фиг. 4 представлен вид время-частотного распределения в отраженном от корпуса подводного объекта излучении, которую (совместно с проходной характеристикой) используют для оценки уровней отражения тонального акустического сигнала от корпуса подводного объекта. Чем достигается поставленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроакустический доплеровский способ оценки технических параметров отдельных участков корпуса подводного объекта на полигоне | 2017 |
|
RU2650722C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2000 |
|
RU2178630C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В УСЛОВИЯХ ИЗМЕРИТЕЛЬНОГО ГИДРОАКУСТИЧЕСКОГО ПОЛИГОНА С НЕПОСТОЯННОЙ ВО ВРЕМЕНИ ПЕРЕДАТОЧНОЙ ФУНКЦИЕЙ | 1992 |
|
RU2063106C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| СПОСОБ ОЦЕНКИ ДОПЛЕРОВСКОГО СМЕЩЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СЛОЖНОГО СИГНАЛА | 2014 |
|
RU2565237C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2284543C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2004 |
|
RU2284484C2 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
Изобретение относится к области гидроакустики и может быть использовано для оценки технических параметров подводного объекта (ПО) на гидроакустическом полигоне. Техническим результатом, получаемым от внедрения изобретения, является получение возможности оценки уровня отражения тонального акустического сигнала от корпуса ПО. Способ заключается в том, что ПО направляют по прямолинейной траектории мимо гидроакустического рабочего средства измерений (РСИ). Облучают ПО акустической волной на фиксированной частоте. Осуществляют прием доплеровского сигнала РСИ, отраженных от ПО. Определяют время-частотные распределения и оценку уровней отражения тонального сигнала от корпуса ПО. 4 ил.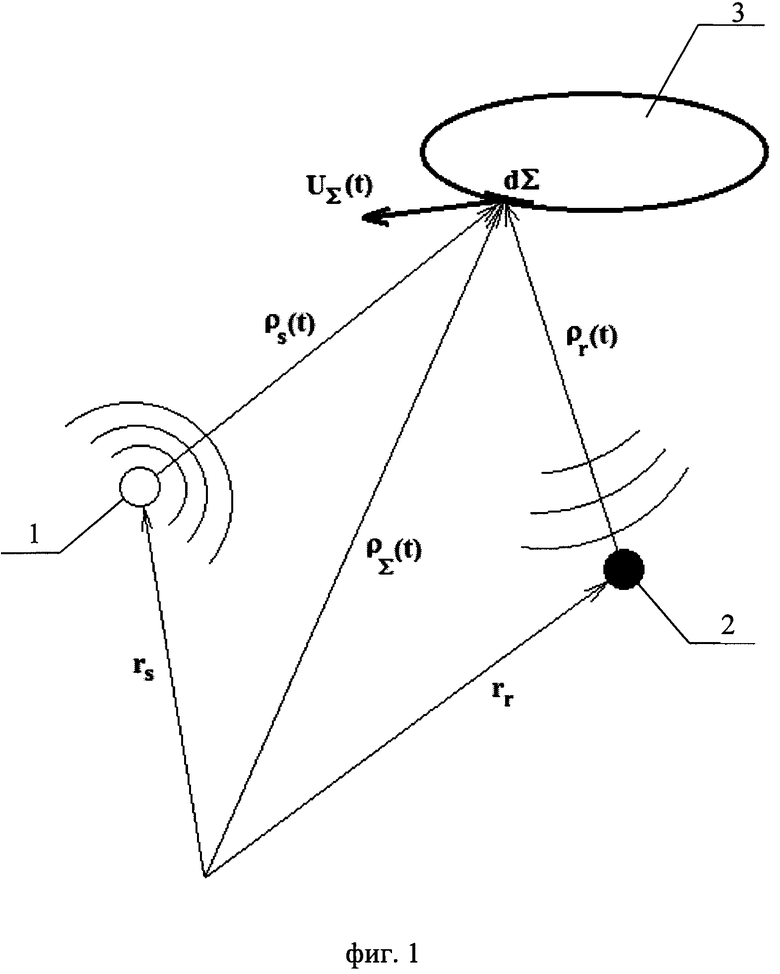
Доплеровский способ оценки технических параметров подводного объекта на гидроакустическом полигоне, заключающийся в размещении на полигоне гидроакустического рабочего средства измерений, обеспечении движения по прямолинейной траектории испытуемого подводного объекта, с равномерной скоростью относительно рабочего средства измерений, приеме рабочим средством измерений доплеровского сигнала от движущегося подводного объекта и последующей обработке принятого доплеровского сигнала, в результате которой определяют время-частотные распределения движущегося подводного объекта, отличающийся тем, что испытуемый подводный объект облучают акустической волной на фиксированной частоте, а прием доплеровского сигнала рабочим средством измерений проводят в отраженном от подводного объекта излучении, при последующей оценке уровней отражения тонального сигнала от корпуса подводного объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2004 |
|
RU2284484C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОРЕПЛАВАНИЯ СУДОВ С БОЛЬШОЙ ОСАДКОЙ И ВОДОИЗМЕЩЕНИЕМ | 2007 |
|
RU2342681C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ В ВИДЕ ЗВУКОРЯДА НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2011 |
|
RU2464588C1 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1999 |
|
RU2232473C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЗВУКОВОГО ДАВЛЕНИЯ ГИДРОАКУСТИЧЕСКОГО ИСТОЧНИКА В ЕСТЕСТВЕННОМ ВОДОЕМЕ И ИЗЛУЧАТЕЛЬ ОПОРНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2010456C1 |
| JP 2000241545 A, 08.09.2000. | |||

