P-1.обретение относится к автоматизации техно.кличсских процессов, а именно к автоматизации процесс; д|)( материала в лроби.чьныл агрегатах, преимущественно в щековых дробилках, и может быть исиользопяно в промышленности строительных материалов, а также в металлургической и горнорудной промышленнсти. Известно устройство для регулирования производительности дробилки, содержащее датчик и регулятор ироизводительности дробилки, датчик и регулятор мощности (нагрузки) привода дробилки, выполненные ан;)Л(), блок зада-ния и регулируемый привод питателя, загружающего дробилку, а также предназначенные для защиты узла питатель дробилка дискретные датчики: уровня материала в приемном бункере, негабаритного куска материала в приемной пасти дробилки и скорости конвейера, отводящего материал от дробилки I. В связи с неоднородностью дробимого материала нестандартные куски часто застревают в верхней часп кчмеры дробления, выще зоны ЭФФ1 к I ппного дробления (происходит так называе.мо( ивисание). При этом потребляемая дроби-лки) мощность отличается от мощности .ХО.1ОСТОГО хода не начительно, даже при наличии слоя материала на зависшем куске. Поэтому известное устройство не срабатывает, и материал по-прежнему поступает в дробилку, вызывая ее завал. Наиболее близким к предлагаемому по технической сущности является устройство для регулирования производительности дробилки, включающее датчики мощности дробилки и уровня материала в дробилке и регулируемый привод питателя дробилки с блоком управления 2. Укачанное устройство позволяет достичь максимальной производительности в условиях изменения крупности и формы кусков материала, но только за счет снижения надежности работы: максимальная производительность дробилки может быть достигнута лищь при высоком рабочем уровне заполнения материалом дробилки, т. е. при увеличении предельного уровня, по которому Регулятор уровня данного устройства останавливает питатель, следовательно, при заиг MiM:.; и;|;ал дробилки не исключается. Л ii 1,::1 предотвращения необходимо ограничписШ, рабочий уровень загрузки дробилки, умен1, производительность. Цель 11:и)брстения - повышение точности регулирования. Поставленная цель достигается тем, что устройство для регулирования производительности дробилки, включающее датчики мощнч, дробилки . и уровня материала в дроби. 1ке и регулируемый привод питателя дробилки г блоком управления снабжено 1 7.J двумя пороговыми элементами и логическим элементом И, первый вход которого соединен с выходом первого порогового элемента, подключенного к датчику мощности дробилки, второй вход - с выходом второго порогового элемента подключенного к датчику уровня материала в дробилке, а выход - с регулируемым приводом питателя дробилки. На фиг. 1 изображена структурная схема устройства на фиг. 2 - работа устройства; на фиг. 3 - пример выполнения блока управления. Устройство (фиг. 1) содержит датчик 1 мощности привода дробилки 2, соединенный с пороговым элементом 3, датчик 4 уровня материала в дробилке 2, соединенный с другим пороговым элементом 5, логический элемент И 6, регулируемый привод 7 питателя 8 и блок 9 управления. Датчик 1 MOUIности включает измеритель 10 и сумматор 11. На фиг. 2 изображен кусок материала, зависщий в дробилке 2 на уровне ho- В известном устройстве при зависании питатель 8 продолжает работать и останавливается блоком 9 управления только при достижении предельного уровня Ьш, при этом дробилка 2 завалена материалом на высоте от ho до hm, что приводит к длительной остановке дробилки, необходимой для разбора завала (эта операция является ручной и поэтому весьма трудоемкой). Предлагаемое устройство останавливает питатель 8 непосредственно после зависания и остановка дробилки 2 необходима лищь на малый промежуток времени, затрачиваемый на уборку застрявщего куска. Блок 9 управления может быть выполнен в различных вариантах, отличаясь регулируемыми величинами (например, производительность дробилки 2, производительность питателя 8, мощность привода дробилки 2, уровень материала в дробилке 2 и соответственно наличием или отсутствием соответствующих датчиков, однако подобрать соответствующий аналоговый уровнемер, затруднительно в связи с отсутствием подходящих для дробилок надежных и точных стандартных датчиков). Могут быть также отличия в количестве автоматических регуляторов и способе их соединения между собой - параллельное или последовательное. В качестве примера (на фиг. 3) приведен блок 9 управления, содержащий последовательно соединенные блок 12 задания, регулятор 13 производительности дробилки 2, второй вход которого подключен к датчику 14 производительности и регулятор 15 мощности привода дробилки 2, подключенный вторым входом к датчику 1 мощности, а выходом - к задающему входу привода 7 питателя 8. Указанные элементы блока 9 осуществляют непрерывное регулирование производительности дробилки 2. Кроме того, он содержит «аварийные датчики: датчик 16 уровня материала в приемном бункере 17, с которого питатель 8 загружает дробилку 2 материалом; датчик 18 негабаритного куска материала в дробилке 2 и датчик 19 скорости конвейера 20, отводящего дробленный материал от дробилки 2. Эти датчики подсоединены к блокирующим входам привода 7 питателя 8, как и выход элемента 6 и осуществляют остановку питателя 8 при «низкой подущке материала на нем (предохранение его от повреждения от падающих в бункер 17 кусков при загрузке последнего исходным материалом). при попадании «негабарита в дробилку 2 (для исключения завала дробилки при дальнейшей работе питателя 8), при остановке конвейера 20 или при сходе, пробуксовке или снижении скорости его ленты (для предотвращения его завала дробленным материалом). Датчик 1 мощности измеряет активную мощность, потребляемую приводом дробилки 2 за вычетом мощности холостого хода, потребляемой дробилкой при отсутствии в ней материала. Датчик 1 (фиг. 3) содержит измеритель 10, представляющий собой преобразователь активной мощности, соединенный с высоковольтным приводом дробилки 2 через понизительные трансформаторы тока и напряжения, и сумматор 11, в котором из величины сигнала РО. измерителя 10 вычитается активная мощность холостого хода Рку. Пороговые элементы 3 и 5 являются стандартными. В качестве датчика 4 уровня используется радиозотопный прибор, он устанавливается на противоположных стенках дробилки 2 на уровне 2/3 высоты камеры дробления. Логический элемент 6 является стандартным. Регулируемый привод 7 может быть выполнен по любой системе управления с плавным регулированием частоты вращения электродвигателя питателя 8, например асинхронно-вентильный каскад, тиристорный преобразователь - двигатель постоянного тока, тиристорный преобразователь - вентильный двигатель, преобразователь частоты - асинхронный двигатель. Датчик 14 производительности измеряет мгновенную производительность дробилки 2 и устанавливается на конвейере 20 в непосредственной близости от места падения материала из дробилки 2 (для исключения ухуди1ения качества регулирования в результате транспортного запаздывания). Датчик может быть выполнен на основе любых серийных конвейерных весов или датчиков, имеющих выходной сигнал мгновенной производительности. Датчики 16 и 18 радиоизогопные ириборы. Датчик 16 устанавливается на приемном бункере 17 на высоте 1 2 м от уровня ленты питателя 8, а датчик 18 между питателем 8 и дробилкой 2 на 0,5 м выще боковой ее футеровки. При этом гамма-реле датчика 18 настраивается с порогом, исключающим ложное срабатывание и остановку питателя 8 от пролетающих мимо при работе дробилки кусков материала. Датчик 19 - реле скорости, устанавливается на конвейере 20. Устройство работает следующим образом. При нормальном ходе технологического процесса поддерживается заданная производительность дробилки 2 блоком 9 управления изменяющим скорость питателя 8 по заданному закону с помощью привода 7. Пороговое значение элементов 3 и 5 устанавливается таким, что при этом на входах элемента 6 исключается одновременное появление сигналов (если в зоне дробления материал, то величина мощности от датчика 1 превышает порог элемента 3 и на его выходе «Меньще сигнал отсутствует, а когда на нем появляется сигнал, это значит отсутствие материала в дробилке, например, при пуске, но при этом уже величина сигнала уровня от датчика 4 меньще порога элемента 5 и на выходе «Больше последнего отсутствует сигнал). Одновременное появление сигналов на обоих входах элемента 6 возможно лищь в случае зависания куска материала в камере дробления, поскольку при этом датчик уровня 4 показывает наличие материала в дробилке 2, а датчик 1 мощности выдает сигнал небольшой величины. В результате срабатывает элемент И 6 и останавливает питатель 8 через привод 7. Таким образом, в устройстве может быть увеличен рабочий уровень загрузки дробилки, что позволяет достичь ее максимальной производительности при обеспечении высокого уровня надежности, поскольку завал дробилки при зависании исключается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования трехстадийного комплекса дробления | 1986 |
|
SU1450861A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ | 2015 |
|
RU2595739C1 |
| Устройство для регулирования производительности дробилки | 1982 |
|
SU1036372A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ РЕЖИМОМ КОНУСНОЙ ДРОБИЛКИ | 2019 |
|
RU2734831C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ МАТЕРИАЛА | 2004 |
|
RU2272673C2 |
| Способ регулирования режима работы комплекса дробления и устройство для его осуществления | 1988 |
|
SU1570772A1 |
| Способ регулирования режима работы дробилки | 1981 |
|
SU946672A1 |
| Устройство для регулирования производительности дробилки | 1983 |
|
SU1135493A1 |
| Система регулирования замкнутым процессом дробления | 1983 |
|
SU1163909A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЩЕКОВОЙДРОБИЛКИ | 1972 |
|
SU335001A1 |

УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ДРОБИЛКИ, включающее датчики мощности дробилки и уровня материала в дробилке и регулируемый привод питателя дробилки с блоком управления, отличающееся тем, что, с целью повыщения точности регулирования, оно снабжено двумя пороговыми элементами и логическим элементом И, первый вход которого соединен с выходом первого порогового элемента, подключенного к датчику мощности дробилки, второй вход - с выходом второго порогового элемента, подключенного к датчику уровня материала в дробилке, а выход - с регулируемым приводом питателя дробилки. (Л оэ сд оо 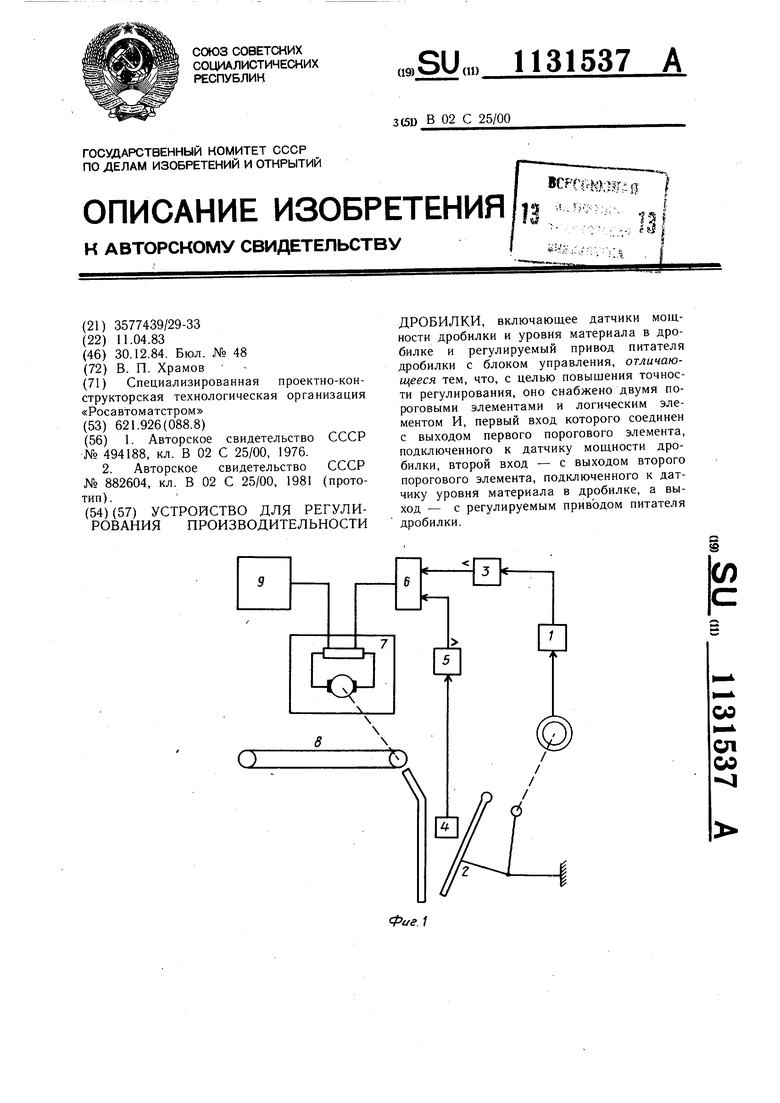
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для регулирования производительности дробилки | 1974 |
|
SU494188A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 882604, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
