Способ динамической корректировки чувствительности дефектоскопических средств при высокоскоростном контроле относится к области ультразвукового (УЗ) неразрушающего контроля длинномерных изделий, в том числе, железнодорожных (ж.д.) рельсов. Способ может использоваться для обнаружения и оценки внутренних и поверхностных дефектов в длинномерных изделиях: в трубах, штангах, металлических листах, тавровых балках, контактных проводах (электротранспорта) и т.п. при сканировании их в широком диапазоне скоростей. Способ пригоден при дефектоскопии действующих рельсовых путей при контроле их дефектоскопными автомотрисами и автомобилями на комбинированном ходу, вагонами-дефектоскопами и диагностическими комплексами.
Не нарушая общности подхода, рассмотрим возможность реализации заявляемого способа на примере контроля ж.д. рельсов скоростными и высокоскоростными многоканальными дефектоскопическими средствами на базе УЗ методов контроля.
Достоверность контроля длинномерных изделий (например, ж.д. рельсов средствами дефектоскопии) во многом зависит от соблюдения заданных параметров в процессе контроля. Естественно, в широком диапазоне (5-120 км/ч) скоростей контроля эксплуатирующихся в пути рельсов, обеспечить необходимую стабильность и эффективность дефектоскопирования с первоначально установленными параметрами контроля маловероятно. При изменении чувствительности контроля параметры сигналов от одного и того же отражателя будут существенно меняться.
Например, при контактном способе ввода УЗ колебаний в металл рельсов на высоких (60-120 км/ч) скоростях сканирования проявляются разнообразные факторы, негативно влияющие на качество контроля:
- неоптимальное поступление контактирующей жидкости, подаваемой под акустические блоки из-за гидродинамических и динамических воздействий;
- воздействия неровностей пути (просадок, выплесков в болтовых стыках, седловин над сварными стыками и т.п.);
- нарушения центровки ультразвуковых электроакустических преобразователей (ЭАП) от продольной оси рельсов (в кривых участках, на рельсах с боковым износом головки).
Даже приближенная оценка влияния некоторых факторов на измеряемые параметры сигналов показывает, что при соблюдении действующей технологии с сохранением предварительной настройки каналов, при высокоскоростном сканировании можно ожидать значительные (до 80%) отклонения параметров контроля от первоначальных значений, которые могут привести к пропуску опасных дефектов в контролируемом объекте.
Поэтому решения, направленные на сохранение требуемой достоверности контроля путем динамической компенсации влияния мешающих факторов УЗ контроля в широком диапазоне скоростей сканирования, являются актуальными.
Известны способы оценки реальной чувствительности контроля по авторскому свидетельству [1] и по патенту [2], где для настройки и корректировки чувствительности контроля используют специальные приспособления (пластинки для определения акустических характеристик объекта), т.е. корректируют параметры контроля по результатам измерений с учетом состояния контролируемого объекта. Недостатком известных устройств и способа является узкая область применения и невозможность их использования в широком диапазоне скоростей сканирования.
Известно устройство регулировки чувствительности каналов дефектоскопа путем использования формирователя порогового уровня по уровню структурных шумов в контролируемых длинномерных объектах (рельсах) [3]. Однако, как показала практика, оценка только уровня шумов не дает необходимой информации для корректной регулировки чувствительности. Это всего лишь приводит к непомерному возрастанию объемов файлов дефектограмм и к существенному затруднению процедуры их передачи с бортов скоростных дефектоскопических комплексов в региональные центры расшифровки для дистанционного анализа. Важно, что сильно зашумленные дефектограммы практически непригодны для визуального анализа и выявления опасных дефектов.
Известен способ оценки работоспособности дефектоскопических средств при высокоскоростном контроле длинномерных объектов (рельсов) по [4], заключающийся в том, что оценку производят на разных скоростях перемещения путем анализа усредненной оценки сигналов от конструктивных элементов объекта, по которой определяют предельную скорость контроля. Недостатком известного способа является ограниченная область применения и низкая достоверность контроля. Ограниченная область применения связана с тем, что в известном способе определяется только допустимая скорость сканирования. Способ не направлен на исправление (компенсацию) воздействий неизбежных при высокоскоростном сканировании негативных факторов, что приводит к снижению качества и достоверности контроля.
Известен способ корректировки чувствительности УЗ рельсового дефектоскопа по патенту [5], заключающийся в относительном перемещении средства и контролируемого объекта, периодическом излучении в контролируемый объект УЗ зондирующих сигналов, приеме отраженных УЗ сигналов от однотипных конструктивных элементов (болтовых отверстий) объекта, оценке амплитуд сигналов и их регистрации, по которой корректируют чувствительность дефектоскопического средства.
Недостатками известного способа [5], принятого за прототип, являются ограниченная область применения и низкая достоверность контроля, вызванные неполным использованием информативных признаков эхо-сигналов от конструктивных отражателей для корректировки чувствительности контроля (используются только амплитуды сигналов) и отсутствием учета влияния текущей скорости сканирования на достоверность контроля.
Задачей, решаемой в заявляемом способе, является повышение качества и достоверности контроля длинномерных объектов контроля путем динамической корректировки чувствительности дефектоскопических средств при высоких скоростях сканирования с учетом действующих при этом негативных факторов.
Для решения поставленной задачи в способе корректировки чувствительности дефектоскопических средств при высокоскоростном контроле длинномерных объектов, заключающимся в относительном перемещении средства и контролируемого объекта в диапазоне скоростей, периодическом излучении в контролируемый объект ультразвуковых зондирующих сигналов, приеме и регистрации отраженных от однотипных конструктивных элементов объекта сигналов, измерении их параметров, по которым корректируют чувствительность дефектоскопического средства, дополнительно измеряют текущую скорость контроля, предварительно формируют набор данных сигналов от конструктивных элементов на разных скоростях и чувствительностях контроля, на основе набора данных устанавливают зависимость между усредненными параметрами сигналов, чувствительностью и скоростью контроля, при выполнении рабочего контроля по измеренным при текущей скорости параметрам сигналов от конструктивных элементов вычисляют необходимую величину коррекции чувствительности дефектоскопического средства.
Существенными отличиями заявляемого способа по сравнению с прототипом являются следующие факторы:
1. В прототипе вопросы изменения параметров сигналов от конструктивных элементов объекта в зависимости от скорости сканирования не рассматриваются. В то же время, например, при контроле эксплуатируемых ж.д. рельсов в диапазоне скоростей от 5 до 120 км/ч эти изменения существенны и должны быть учтены при корректировке чувствительности контроля.
2. Согласно формуле известного технического решения (прототипа) в качестве основного измеряемого параметра используется амплитуда эхо-сигналов от конструктивных элементов. Однако, как показано в [6] и подтверждено в патентах [4 и 7], при УЗ контроле длинномерных изделий ограниченных размеров (размеры сечений изделия сравнимы с размером УЗ пучка) более информативными параметрами являются условные размеры дефектов или совместное использование условных размеров с амплитудными параметрами каждого эхо-импульса в пачке сигналов (интегральный параметр). В заявляемом способе для формирования управляющего сигнала для корректировки чувствительности используются условные размеры или интегральный параметр сигналов от конструктивных элементов, что является более корректным и достоверным.
3. Предварительно формируют набор данных сигналов от конструктивных элементов на разных скоростях и чувствительностях контроля. Формирование такого набора данных, как будет показано ниже, необходимо для получения зависимости параметров сигналов от конструктивных элементов от скорости и чувствительности контроля для конкретного дефектоскопического средства. В прототипе такой анализ не производится.
4. Предлагаемый способ предусматривает использование технического решения в разных областях промышленности. При этом, возможны случаи, когда дефектоскопическое средство является стационарным, а относительно него перемещается контролируемый объект (например, металлические трубы, листы, штанги, тавровые балки, рельсы при их производстве и др.). В прототипе предусмотрен вариант использования известного способа только при контроле эксплуатируемых ж.д. рельсов с помощью дефектоскопных тележек на малых (4-5 км/ч) скоростях при перемещении дефектоскопического средства по контролируемому объекту.
Технический результат заявляемого способа: повышение качества и достоверности контроля длинномерных объектов контроля путем динамической корректировки чувствительности дефектоскопических средств в широком диапазоне скоростей сканирования.
Заявляемый способ иллюстрируется следующими графическими материалами.
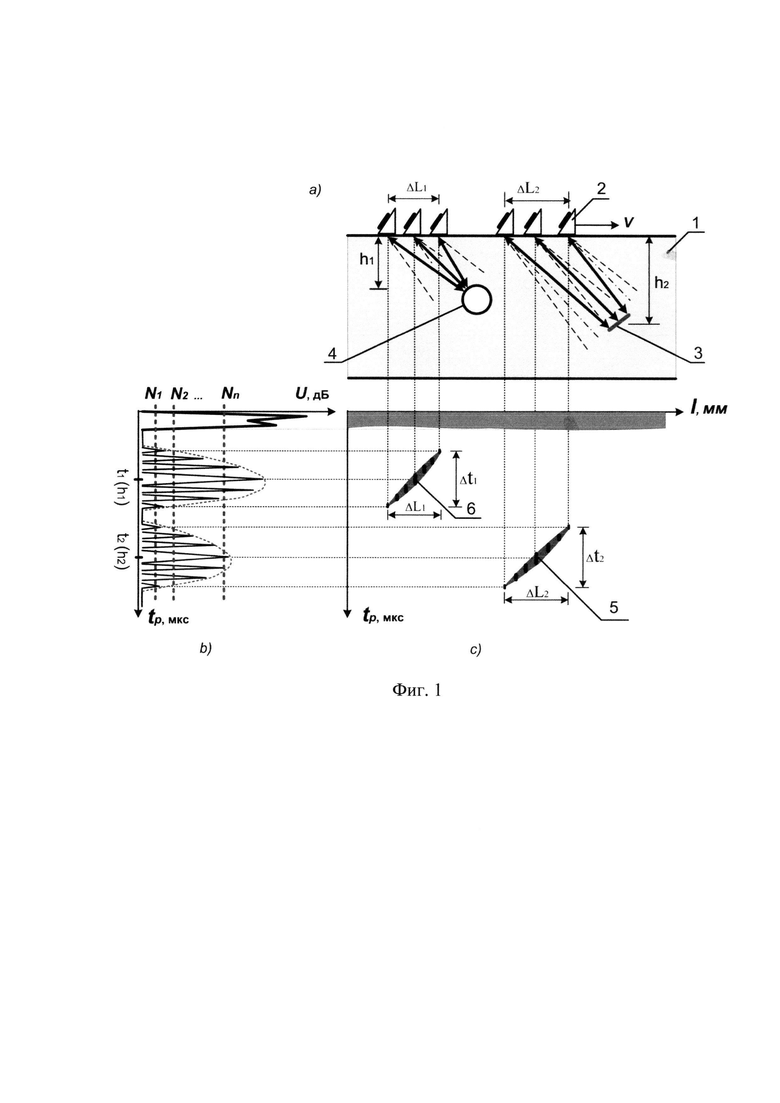
Фиг. 1. Демонстрация формирования сигналов на развертках типа А (а) и В (b) и отображение измеряемых параметров отражателей (с), где:
1 - контролируемый объект;
2 - ультразвуковые электроакустические преобразователи (ЭАП);
3 - внутренняя несплошность (дефект);
4 - конструктивный элемент объекта (в рельсах - болтовое отверстие);
5 - пачки (группы) сигналов от дефекта на В-развертке;
6 - пачка сигналов от болтового отверстия.
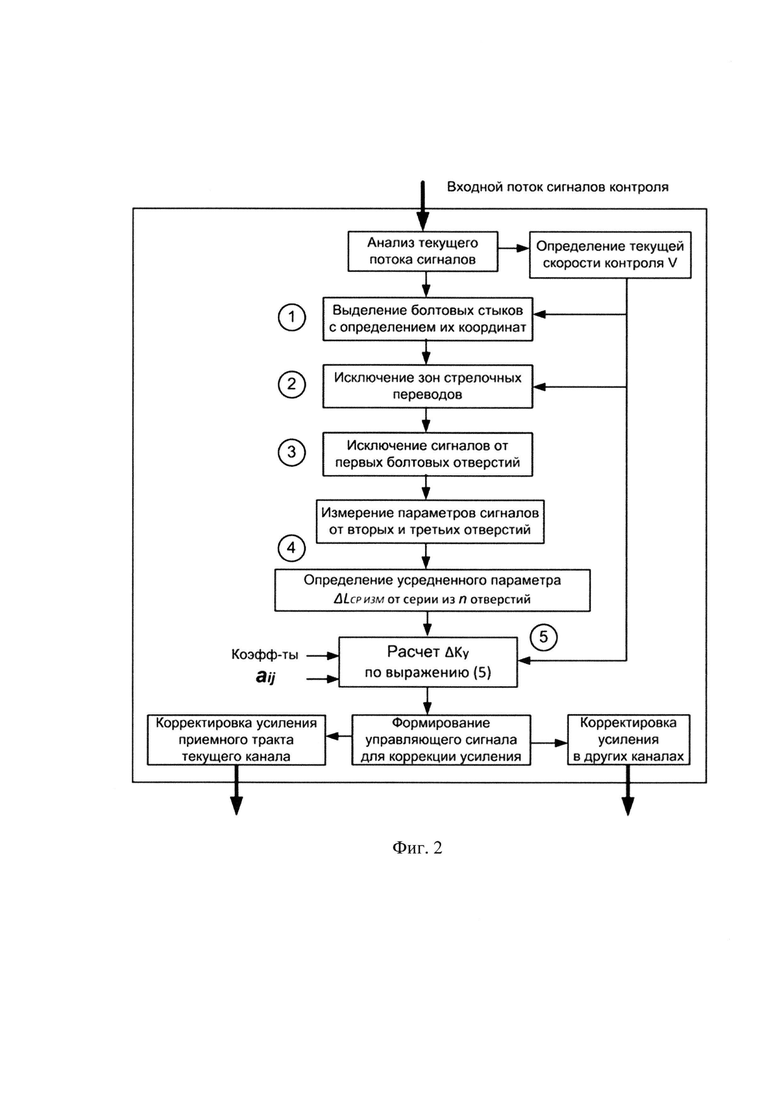
Фиг. 2. Последовательность (алгоритм) формирования набора данных сигналов от конструктивных элементов и корректирующего сигнала для динамической корректировки чувствительности контроля.
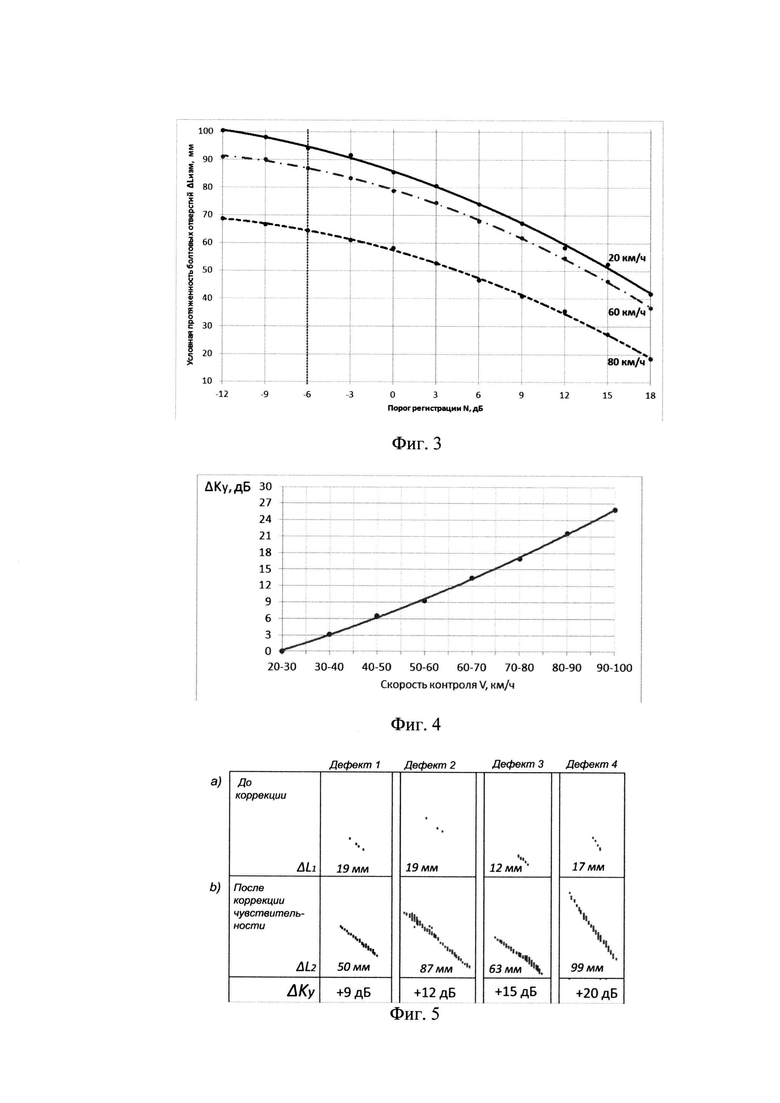
Фиг. 3. Зависимости условной протяженности болтовых отверстий от чувствительности (порога регистрации) на трех разных скоростях контроля: 20, 60 и 80 км/ч.
Фиг. 4. Зависимость величины требуемой корректировки чувствительности от скорости сканирования для конкретных параметров контроля (например, при заданной величине условной протяженности - зоны локации дефектов ΔL).
Фиг. 5. Примеры реализации заявляемого способа при выявлении реальных внутренних дефектов в головке рельсов: сигналы от дефектов до (а) и после (b) корректировки чувствительности контроля.
Рассмотрим реализацию заявляемого способа на примере высокоскоростного УЗ контроля уложенных в путь ж.д. рельсов вагонами-дефектоскопами или диагностическими комплексами (дефектоскопическими средствами), позволяющими контролировать рельсовые пути протяженностью до 250-300 км за один проезд со скоростями до 120 км/ч.
При перемещении со скоростями V от нуля до максимального значения по рельсовым путям дефектоскопического средства (на фиг. 1 не показан) ЭАП 2 (например, ЭАП на основе УЗ пьезопластин) перемещается по поверхности контролируемого объекта 1 (фиг. 1). На пути сканирования последовательно встречаются и регистрируются эхо-сигналы от конструктивных элементов 4 и искомых дефектов 3 (фиг. 1а) с соответствующими параметрами сигналов:
- амплитуда U, дБ;
- временная задержка эхо-сигнала t, мкс относительно зондирующего импульса;
- условная протяженность пачки сигналов по длине изделия (зона локации отражателя) ΔL, мм;
- условная высота дефекта Δt, мкс (или ΔН в мм);
- глубины залегания дефекта h, мм (по максимальному импульсу в средней части пачки).
Наиболее простым и информативным способом представления дефектоскопической информации является развертка типа В на координатной плоскости «Время распространения УЗ луча в контролируемом изделии tp, мкс - путь перемещения преобразователя по изделию l, мм» (фиг. 1с) [8]. Формируется интуитивно понятная дефектограмма, наглядно отображающая взаимное расположение различных отражателей в контролируемом изделии в виде групп (пачек) эхо-сигналов. Как визуальным, так и автоматизированным способом можно определить условные размеры ΔL и Δt пачек сигналов от отражателей (фиг. 1с) при установленном амплитудном уровне N регистрации сигналов (фиг. 1в).
На практике, в соответствии с нормативно-технической документацией (НТД) по контролю [9], в основном используют условную протяженность ΔL, мм пачек сигналов от дефектов и отражателей (для ненаправленных отражателей параметры ΔL и Δt взаимосвязаны). Браковочные признаки сигналов в рельсовой дефектоскопии также ориентированы на оценку условной протяженности ΔL (а не максимальной амплитуды) искомых дефектов. Согласно требованиям НТД минимальная условная протяженность сигналов от дефектов, подлежащих к дополнительному осмотру в пути, составляет ΔLmin - 20 мм на номинальном уровне условной чувствительности контроля.
В общем случае, как показано в [4 и 7], в качестве информационного параметра сигналов от конструктивных отражателей объекта целесообразно использовать интегральный параметр, наиболее полно отражающий характеристики сигналов с учетом условной протяженности ΔL (количества эхо-импульсов, отраженных от дефекта) и амплитуды каждого импульса.
Основная идея предлагаемого способа заключается в измерении в процессе сканирования текущих параметров сигналов от регулярных конструктивных элементов объекта контроля, сравнении измеренных параметров с их базовыми значениями, и, при их значительном расхождении, - в формировании сигнала коррекции текущей чувствительности контроля. Использование регулярно встречающихся на пути сканирования типовых (одинаковых) конструктивных элементов позволяет объективно учитывать воздействие негативных факторов и, в соответствии с заявляемым способом, оперативно корректировать параметры (чувствительность) контроля на конкретном участке контролируемого объекта (рельсового пути).
В общем случае, в качестве регулярных конструктивных отражателей рельсового пути, которые возможно и целесообразно использовать для коррекции чувствительности каналов дефектоскопических средств, могут являться: вторые и третьи отверстия в болтовых стыках; донная поверхность рельсов (для настройки каналов прямых ЭАП с углом 0°); угловые отражатели в зоне торцов рельсов, образованные поверхностью катания (подошвой) и торцом рельсов в зоне болтовых стыков; сварные стыки рельсов, например, путем использования характерных отражений от структуры металла в зоне термического влияния [10].
Не нарушая общности рассмотрения, возможность реализации способа продемонстрирована на примере использования только одного из возможных параметров регистрируемых сигналов - условного размера ΔL (протяженности зоны локации) болтовых отверстий (фиг. 1а и с). При использовании более сложных параметров, например, интегрального параметра, принципы реализации способа сохраняются, а точность корректировки чувствительности контроля может быть повышена.
Последовательность операций по динамической (во время проезда скоростного дефектоскопического средства) корректировке чувствительности контроля с учетом получаемых характеристик сигналов от болтовых отверстий в рельсах можно представить в виде алгоритма (фиг. 2). В качестве примера за тестовые конструктивные элементы в рельсах взяты стандартизированные отверстия (диаметром 36 мм для рельсов типа Р65 по ГОСТ [9]) в зоне болтовых стыков для крепления болтами стыковых накладок.
Во время проезда дефектоскопического средства из потока принимаемых в процессе сканирования сигналов по специальному алгоритму (подпрограмма 1 на фиг. 2) выделяются группы сигналов в зоне болтовых стыков. При этом целесообразно исключить сигналы, получаемые в зонах стрелочных переводов (кроме сигналов от отверстий на примыкающих разрядных звеньях). В этих зонах ходовая часть любой подвижной единицы испытывает значительные динамические воздействия, и сигналы, получаемые на этих участках, могут отличаться от сигналов, фиксируемых на основном перегоне. Поэтому вопросы обеспечения корректного контроля зон стрелочных переводов должны рассматриваться отдельно. Возможный вариант распознавания стрелочных переводов (подпрограмма 2 на фиг. 2) и даже их проектов (типов) предложен в [10].
Как показано в [4], при сплошном сканировании принятыми схемами УЗ прозвучивания первые болтовые отверстия (подсчет отверстий осуществляется от стыкового зазора) озвучиваются не полностью из-за малой протяженности зоны локации со стороны торцов рельсов. Нарушения геометрии поверхности катания рельсов вблизи стыкового зазора также оказывают значительное влияние на параметры сигналов от первых отверстий. Поэтому с помощью специальной подпрограммы 3 (фиг. 2), сигналы от первых болтовых отверстий должны быть исключены из рассмотрения, а измерение параметров производится только от вторых и третьих отверстий стыкуемых рельсов. В отдельной подпрограмме 4 (фиг. 2) выполняется измерение усредненной условной протяженности ΔLCP ИЗМ сигналов от набора (не менее 30 штук) указанных отверстий, а также сравнение ΔLCP ИЗМ с базовым значением ΔLБ.
В качестве базового значения ΔLБ сигналов от конструктивных элементов целесообразно использовать условный размер пачек сигналов от болтовых отверстий, полученных при благоприятных условиях (малая скорость сканирования, стабильный акустический контакт и т.п.). При существенном (например, более ±10%) отклонении параметров принимаемых сигналов ΔLCP ИЗМ от базового значения ΔLБ, должен вырабатываться управляющий сигнал для корректировки коэффициента усиления (чувствительности) приемного тракта дефектоскопического средства. Требуемая величина корректировки чувствительности контроля ΔKY рассчитывается с помощью соответствующего выражения подпрограммой 5.
Покажем пример получения выражения для расчета величины ΔKy (фиг. 2) с использованием полученного при тестовом проезде по участку пути набора данных. С целью наглядности на фиг. 3 представлен процесс формирования набора данных (в виде трех зависимостей) при разных чувствительностях и скоростях контроля. Зависимости усредненной условной протяженности ΔLCP ИЗМ сигналов от болтовых отверстий получены на трех скоростях контроля (20, 60 и 80 км/ч) при обработке реальной дефектограммы участка рельсового пути протяженностью около 110 км Юго-Восточной ж.д., проконтролированного скоростным дефектоскопическим комплексом «АВИКОН-03М». На каждом амплитудном пороге регистрации N измерялась условная протяженность пачек сигналов от 50 болтовых отверстий, и определялось их среднее значение ΔLCP ИЗМ (первые болтовые отверстия вблизи торцов рельсов не учитывались). На фиг. 3 видно, что при всех скоростях контроля повышение порога регистрации сигналов (т.е. снижение чувствительности контроля) приводит к уменьшению условной протяженности сигналов от отверстий по квадратичному закону. Например, при уменьшении чувствительности контроля на 30 дБ (от -12 дБ до +18 дБ) значения ΔLCP ИЗМ падают на 60-70%.
При анализе сигналов на уровне регистрации «-6 дБ» (являющимся рабочим порогом при поиске дефектных сечений) видно, что изменение скорости сканирования на 60 км/ч (с 20 до 80 км/ч) приводит к уменьшению условных размеров отверстий в рельсах ΔLCP ИЗМ примерно на 30 мм (30%) (см. расстояние по вертикальной оси между крайними линиями на фиг. 3).
Отметим, что формирование набора данных сигналов от конструктивных элементов на разных скоростях и чувствительностях контроля может быть выполнено как при отдельном тестовом проезде, так и при выполнении рабочего проезда с поиском потенциальных дефектов. В последнем случае, определенная часть участка объекта (рельсового пути) до момента накопления набора данных, достаточных для получения первоначальных зависимостей (аналогично фиг. 3), характерных для конкретного дефектоскопического средства, может быть проконтролирован с недостаточной достоверностью. При контроле железнодорожных рельсов с помощью высокоскоростных дефектоскопических средств этот участок обычно не превышает 3-5 км (участок набора скорости). После накопления данных и ведения корректировки чувствительности в соответствии с заявляемым способом начинается рабочий проезд с управлением параметров контроля с учетом воздействующих негативных факторов.
Полученные на фиг. 3 зависимости показывают, что величина необходимой корректировки чувствительности ΔKY дефектоскопического средства при высокоскоростном сканировании одновременно зависит как минимум от двух взаимосвязанных факторов: от скорости сканирования и от измеренного условного размера тестового отражателя. В действующих системах контроля текущие значения этих параметров могут быть определены с высокой точностью.
Располагая данными, графически изображенными на фиг. 3 и содержащими информацию об условной протяженности ΔLCP.ИЗМ, скорости V и пороговом уровне регистрации сигналов N, при котором проводились измерения, для имеющегося набора сигналов от болтовых отверстий, можно установить связь между указанными параметрами. В частности, можно определить зависимость порога регистрации (чувствительности) от условной протяженности при любом фиксированном значении скорости и, тем самым, - определить зависимость требуемого значения корректировки чувствительности тракта ΔKY от измеренных значений ΔL на текущей скорости V. Для этого нужно аппроксимировать конечный набор из М точек в трехмерном пространстве

поверхностью, отражающей связь между условной протяженностью, скоростью и порогом отображения.
Зададим поверхность уравнением следующего вида:

где aij, i=0, …,I, j=0, …, J - некоторые коэффициенты. Определим такие значения коэффициентов aij, при которых поверхность будет оптимальным образом соответствовать исходному набору данных, а именно, когда сумма квадратов расстояний от поверхности до набора имеющихся точек будет минимальной. Необходимо найти минимум функции многих переменных
Из условия на экстремум функции FL
вытекает система из (I+1)×(J+1) линейных алгебраических уравнений относительно коэффициентов aij:

Если в качестве исходных точек в трехмерном пространстве (1) взять данные, изображенные на фиг. 3, и при описании поверхности (2) использовать степени скоростей и порогов регистрации не выше первой (I=1, J=1), то в результате решения системы уравнений (3) мы получим следующие значения четырех имеющихся в данном случае коэффициентов:
a 00≈93.8, а01≈-2.06, a10≈-0.432, а11≈0.00465,
и зависимость N от V и ΔL будет задаваться выражением:

Требуемая величина корректировки усиления может быть определена по выражению:
Необходимо отметить, что в полученном выражении, хотя это явно и не видно из (5), условная протяженность сигналов от отверстий ΔLCP ИЗМ в достаточно больших пределах зависит от скорости. Вследствие ощутимого сдвига ЭАП за время распространения УЗ колебаний до дефекта (отражателя) и обратно, условный размер отражателя ΔLИЗМ, измеренный при динамическом режиме (V>0), будет иметь меньшее значение, чем ΔL0, определенный при стационарном режиме (V≈0). В [12 и 13] показано, что при скоростях выше 100 км/ч этот фактор может привести к уменьшению зоны локации искомого дефекта более чем на 20% по сравнению с величиной, измеренной при малых скоростях сканирования. Кроме того, при больших скоростях на уменьшение значения ΔLИЗМ существенное влияние оказывают и отмеченные выше воздействующие на дефектоскопическое средство негативные факторы (нестабильность контакта и т.п).
Для практической реализации может быть получена простая зависимость величины корректировки коэффициента усиления ΔKy при увеличении (в рабочем диапазоне) скоростей сканирования. Для фиксированного базового значения сигналов от болтовых отверстий LБ=90 мм (измеренного на малых скоростях сканирования с хорошим акустическим контактом) и измеренных на разных скоростях V усредненных значений ΔLCP ИЗМ отверстий (при обработке указанной выше реальной дефектограммы участка рельсового пути) по выражению (5) можно построить зависимость, показывающую величину необходимой коррекции усиления приемного тракта дефектоскопического канала ΔKY от скорости сканирования V (фиг. 4).
Фиг. 4 демонстрирует, что при увеличении скорости с 20 до 100 км/ч для сохранения качества проводимого контроля следует увеличить чувствительность контроля (в данном примере - на 25-26 дБ). При этом сигналы от типовых конструктивных элементов (отверстий в рельсах) будут иметь значения, близкие к ΔLБ, а потенциальные дефекты в рельсах будут обнаруживаться так же, как и при нормальных условиях сканирования (при малых скоростях контроля и без воздействия мешающих внешних факторов).
В общем случае изменение чувствительности дефектоскопического средства можно выполнить несколькими способами, путем:
- изменения коэффициента усиления приемного тракта;
- регулировки амплитуды зондирующих импульсов;
- изменения порога отображения анализируемых сигналов.
В любом случае первоначальную информацию о необходимости корректировки чувствительности в предлагаемом способе получают путем оценки параметров сигналов, получаемых от конструктивных элементов в процессе сканирования контролируемого изделия.
Предварительная проверка предложенного принципа корректировки чувствительности дефектоскопических каналов проведена на реальных дефектах в головке рельсов (фиг. 5). Как видно (фиг. 5а), все сигналы от четырех рассматриваемых дефектов по действующей НТД могут быть проигнорированы оператором, т.к. их условные размеры малы (ΔLИЗМ<ΔLmin). Введение корректировки чувствительности (добавление усиления) ΔKУ, в соответствии с заявляемым способом, позволяет увеличить условные размеры (ΔL2 на фиг. 5б) от дефектов в 3-6 раза по сравнению с размерами ΔL1 сигналов до коррекции (фиг. 5а), что обеспечивает их надежное обнаружение как визуально, так и автоматизированным способом.
Таким образом, предлагаемый способ оперативной (динамической) корректировки чувствительности с использованием отражений от конструктивных элементов контролируемого объекта в условиях высокоскоростного контроля и действия неблагоприятных факторов позволяет решить поставленную задачу и получить ожидаемый технический результат: повысить качество и достоверность контроля длинномерных объектов.
Важным преимуществом заявляемого способа является и то, что корректировка чувствительности дефектоскопического средства является не отдельным технологическим процессом, а производится постоянно и оперативно в процессе дефектоскопии длинномерного объекта.
Источники
1. SU 836577.
2. RU 2726277.
3. RU 62708.
4. RU 2753810.
5. RU 2603332.
6. Ермолов И.Н. Методы ультразвуковой дефектоскопии. Ч. 1. Московский горный институт, 1966. 267 с.
7. RU 2699942.
8. Марков А.А., Кузнецова Е.А. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2. Расшифровка дефектограмм. С-Пб.: Ультра Принт, 2014. 332 с.
9. ГОСТ 18576-96. Контроль неразрушающий. Рельсы железнодорожные. Методы ультразвуковые. 1996.
10. RU 2573707.
11. RU 2652673.
12. Особенности оценки условных размеров дефектов при значительных скоростях сканирования // Дефектоскопия. 1989. №3. С. 8-16.
13. SU 998943.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОКАНАЛЬНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2023 |
|
RU2809185C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии длинномерных объектов | 2021 |
|
RU2756933C1 |
| Способ оценки работоспособности дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2753810C1 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |
| Способ оценки работоспособности искательной системы дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2758403C1 |
| Способ зеркально-теневого ультразвукового контроля с адаптивным пороговым уровнем | 2022 |
|
RU2787948C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ИЗДЕЛИЙ | 2001 |
|
RU2184373C1 |
| Способ ультразвукового контроля локальных участков рельсов | 2023 |
|
RU2823665C1 |
| Способ прогнозирования развитий аномалий в головке рельсов | 2019 |
|
RU2699942C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |
Использование: для динамической корректировки чувствительности дефектоскопических средств при высокоскоростном контроле длинномерных объектов. Сущность изобретения заключается в том, что осуществляют относительное перемещение дефектоскопического средства и контролируемого объекта в определенном диапазоне скоростей, выполняют периодическое излучение в контролируемый объект ультразвуковых зондирующих сигналов, осуществляют прием и регистрацию отраженных от однотипных конструктивных элементов объекта сигналов, измеряют их параметры, по которым корректируют чувствительность дефектоскопического средства, при этом измеряют текущую скорость контроля, предварительно формируют набор данных сигналов от конструктивных элементов на разных скоростях и чувствительностях контроля, на основе набора данных устанавливают зависимость между усредненными параметрами сигналов, чувствительностью и скоростью контроля, при выполнении рабочего контроля по измеренным при текущей скорости параметрам сигналов от конструктивных элементов вычисляют необходимую величину корректировки чувствительности дефектоскопического средства. Технический результат: повышение качества и достоверности контроля длинномерных объектов контроля путем динамической корректировки чувствительности дефектоскопических средств в широком диапазоне скоростей сканирования. 5 ил.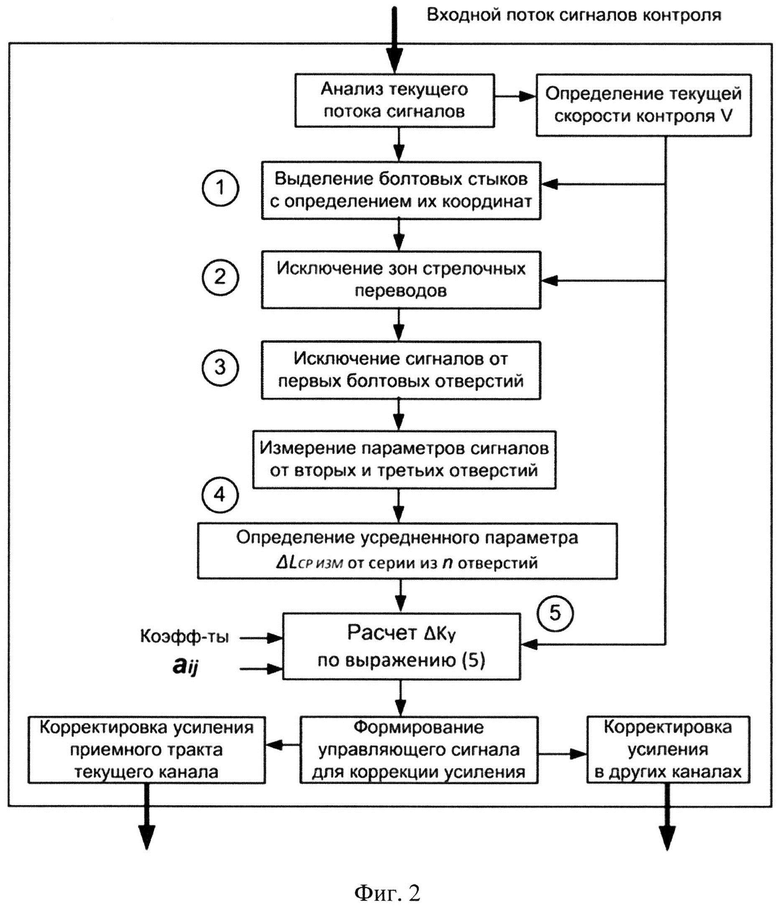
Способ динамической корректировки чувствительности дефектоскопических средств при высокоскоростном контроле длинномерных объектов, заключающийся в относительном перемещении средства и контролируемого объекта в диапазоне скоростей, периодическом излучении в контролируемый объект ультразвуковых зондирующих сигналов, приеме и регистрации отраженных от однотипных конструктивных элементов объекта сигналов, измерении их параметров, по которым корректируют чувствительность дефектоскопического средства, отличающийся тем, что измеряют текущую скорость контроля, предварительно формируют набор данных сигналов от конструктивных элементов на разных скоростях и чувствительностях контроля, на основе набора данных устанавливают зависимость между усредненными параметрами сигналов, чувствительностью и скоростью контроля, при выполнении рабочего контроля по измеренным при текущей скорости параметрам сигналов от конструктивных элементов вычисляют необходимую величину корректировки чувствительности дефектоскопического средства.
| СПОСОБ НАСТРОЙКИ ЧУВСТВИТЕЛЬНОСТИ РЕЛЬСОВОГО УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 2015 |
|
RU2603332C1 |
| Способ оценки работоспособности дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2753810C1 |
| Устройство для масштабной корректировки | 1960 |
|
SU134133A1 |
| Аппарат для непрерывного разваривания сырья в спиртовом производстве | 1959 |
|
SU124397A1 |
| WO 8203919 A1, 11.11.1982 | |||
| US 7516662 B2, 14.04.2009. | |||

