Изобретение относится к области технической диагностики и неразрушающего контроля материалов и может быть использовано в качестве датчика измерения малых деформаций.
Известен композитный датчик измерения механических напряжений (Gore J., Fixter L., Eaton S., Horkins M., West R., Stinger L., Composite sensor. Pat. WO 2010055282, G01L 1/22, G01R 33/09, G01M 5/00, publ. 20.05.2010), выполненный из полимерной матрицы и армирующих элементов. Внутри массива полимерной матрицы размещен, по меньшей мере, один слой электропроводной ткани. В слое расположен, по меньшей мере, один магнитомягкий аморфный ферромагнитный провод (АФМ). Через АФМ пропускают переменный ток и регистрируют напряжение на АФМ. При приложении механической нагрузки к материалу импеданс АФМ может изменяться вследствие эффекта гигантского магнитного импеданса и гигантского стресс-импедансного эффекта. Изменение импеданса АФМ приводит к изменению регистрируемого напряжения.
Недостатком этого устройства является сложность измерения локальных механических нагрузок, поскольку датчик имеет протяженный размер и измеряет сигнал, пропорциональный механическим нагрузкам, приложенным по всей длине АФМ. Кроме этого, вследствие эффекта гигантского магнитного импеданса, указанный композитный датчик может реагировать на приложенные внешние магнитные поля, которые будут искажать эффект, связанный с воздействующей механической нагрузкой.
Прототипом предложенного изобретения является датчик измерения механических деформаций (Гудошников С.А., Попова А.В., Фатеев В.М., Игнатов А.С., Тарасов В.П., Гореликов Е.С.) Датчик измерения механических деформаций Заявка на изобретение RU 2016145963, G01L 1/12, G01B 7/24.). Датчик представляет собой прямоугольную пластину из полимерного материала с поперечными разрезами, обеспечивающими возможность ее растяжения в продольном направлении. На верхней поверхности пластины выполнено посадочное место в виде центрально-симметричного углубления. Внутри посадочного места размещен миниатюрный соленоид, в котором расположена дифференциальная измерительная катушка с магниточувствительным элементом в виде АФМ, причем АФМ расположен внутри дифференциальной катушки. Концы АФМ соединены с первой парой контактных площадок, расположенных на противоположных концах прямоугольной пластины, дифференциальная измерительная катушка подключена ко второй паре контактных площадок, а миниатюрный соленоид подключен к третьей паре контактных площадок. При этом все три пары контактных площадок соединены с электронным измерительным устройством, которое содержит источник переменного тока частоты ƒ, источник постоянного тока, усилитель сигналов на удвоенной частоте переменного тока 2ƒ. При этом источник переменного тока соединен с контактными площадками АФМ, источник постоянного тока соединен с контактными площадками миниатюрного соленоида, а вход усилителя сигналов на удвоенной частоте соединен с контактными площадками измерительной катушки и через аналого-цифровой преобразователь соединен с персональным компьютером.
Недостатком этого устройства является нелинейная зависимость между измеряемой деформацией Δl и выходным напряжением датчика: U2f ~ 1/(Δl+H0)2 (где H0 - приложенное к датчику магнитное поле, создаваемое соленоидом), что, с одной стороны, требует сложной обработки сигнала, а с другой стороны, снижает точность измерений в области малых деформаций.
В предложенном изобретении достигается технический результат, заключающийся в расширении функциональных возможностей датчика, а именно в линеаризации передаточной характеристики датчика за счет введения стабилизирующей цепи обратной связи по воздействующему магнитному полю и соответствующем повышении точности в области малых деформаций.
Технический результат достигается следующим образом.
В конструкцию датчика для измерения механических деформаций, состоящего из прямоугольной пластины, выполненной из полимерного материала с поперечными разрезами, обеспечивающими возможность ее растяжения в продольном направлении, и с посадочным местом в виде центрально-симметричного углубления для миниатюрного соленоида, содержащего дифференциальную измерительную катушку с размещенным внутри нее магниточувствительным элементом, выполненным из аморфного ферромагнитного провода, трех пар контактных площадок, а также источника постоянного тока, генератора переменного тока частоты f и усилителя, дополнительно введены генератор переменного напряжения удвоенной частоты 2f, синфазный с генератором частоты f, синхронный детектор сигнала удвоенной частоты 2f и усилитель обратной связи, при этом дополнительно введенный генератор частоты 2f соединен с первым входом дополнительно введенного синхронного детектора сигнала частоты 2f, второй вход которого, в свою очередь, соединен с выходом усилителя, а его выход соединен с дополнительно введенным усилителем обратной связи, при этом усилитель обратной связи напрямую подключен к аналого-цифровому преобразователю, а обратная связь замыкается при включении ключа обратной связи через источник постоянного тока, записывающий миниатюрный соленоид.
В отличие от прототипа, в котором осуществляется прямое измерение амплитуды выходного сигнала датчика, в предложенном техническом решении осуществляется измерение сигнала обратной связи, пропорционального изменению дополнительного магнитного поля, которое прикладывается к АФМ для удержания фиксированного значения выходного напряжения измерительной катушки U0. Благодаря измерению величины тока, создающего дополнительно прикладываемое магнитное поле, линеаризуется передаточная характеристика датчика в широком диапазоне деформаций, при этом измеряемое напряжение пропорционально изменению приложенной деформации.
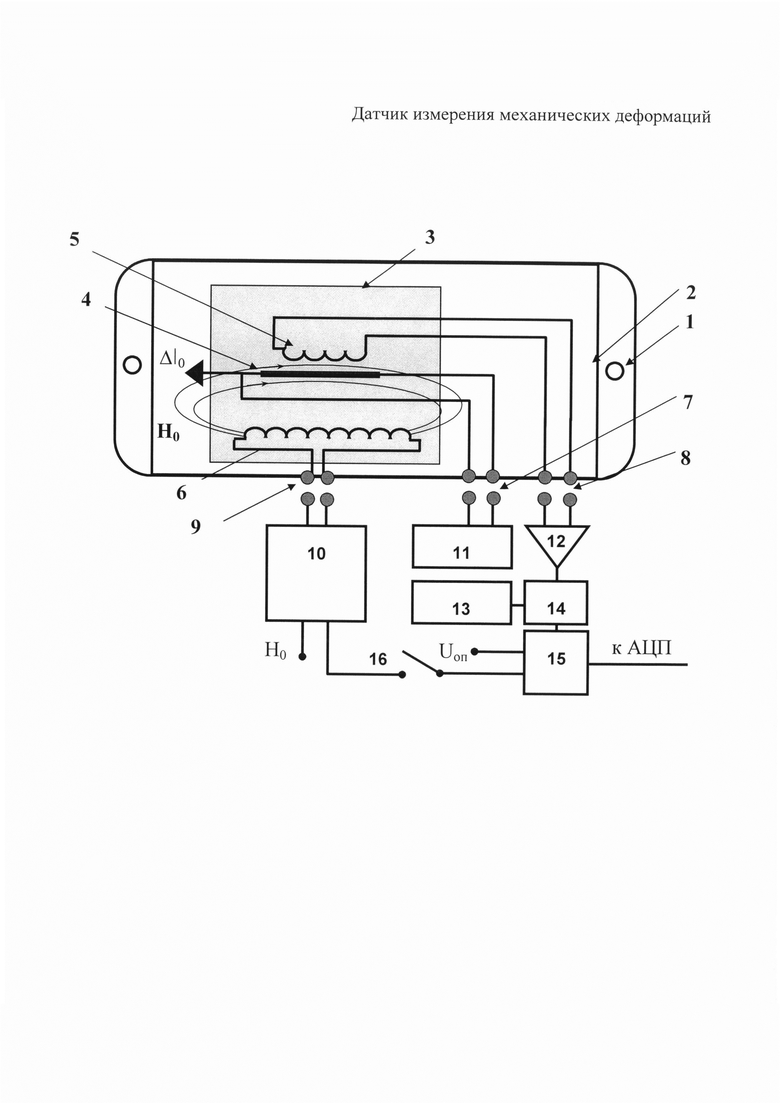
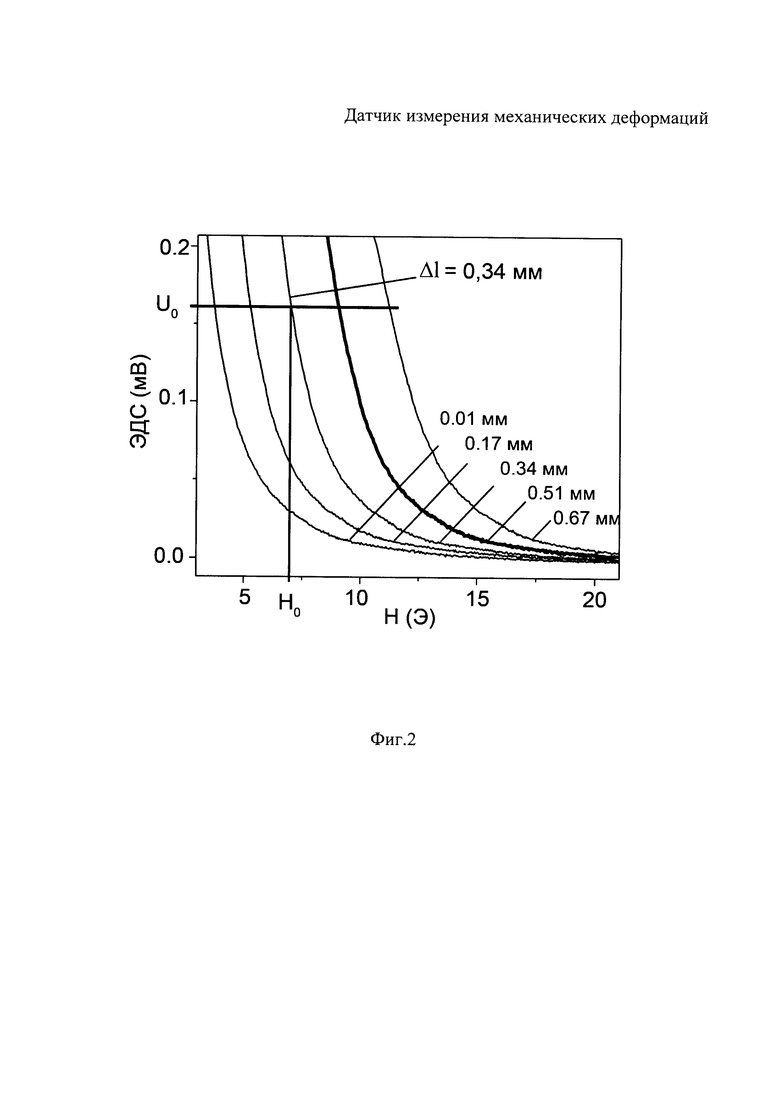
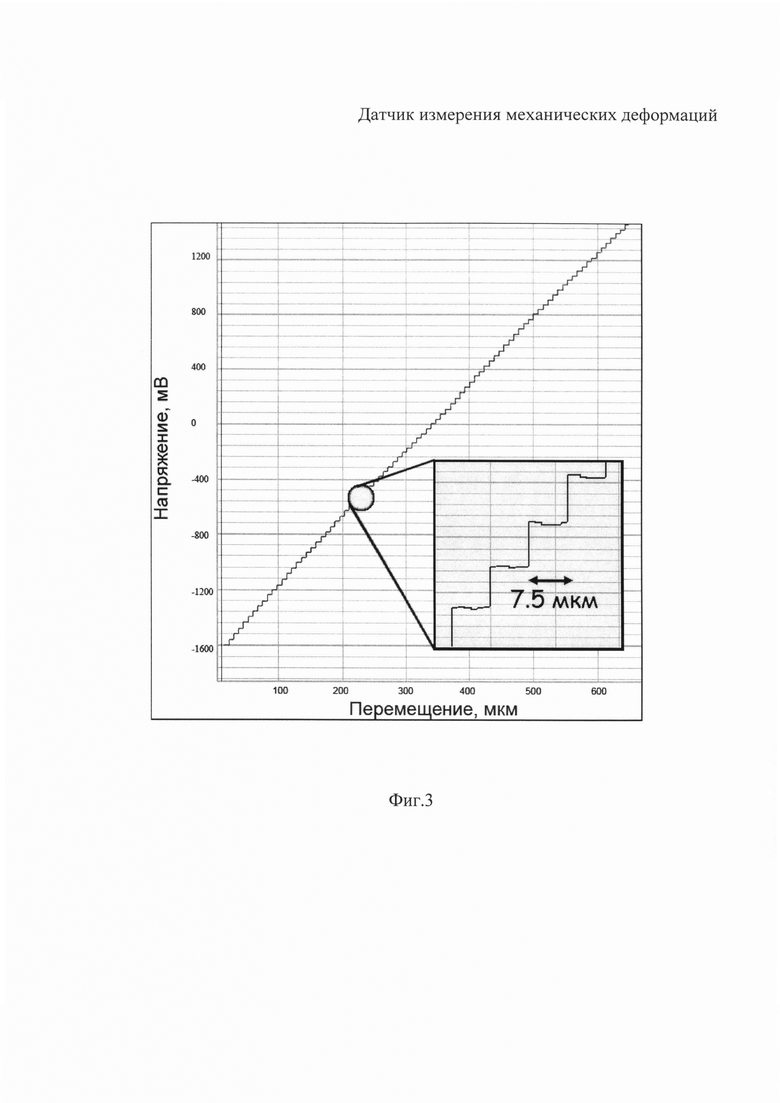
Изобретение поясняется чертежами, где на фиг. 1 изображена схема датчика измерения механических деформаций, на фиг. 2 изображено семейство кривых малоуглового вращения вектора намагниченности (МВВН) АФМ, измеренных под действием приложенных растягивающих деформаций, на фиг. 3 показан результат измерений растягивающих деформаций с помощью предлагаемого датчика.
На фигуре 1 показаны крепежные отверстия 1, прямоугольная пластина 2, посадочное место 3, АФМ 4, дифференциальная измерительная катушка 5, миниатюрный соленоид 6, первая пара контактных площадок 7, вторая пара контактных площадок 8, третья пара контактных площадок 9, источник постоянного тока 10, генератор переменного сигнала частоты f 11, усилитель 12, генератор переменного напряжения удвоенной частоты 2f 13, синхронный детектор сигнала удвоенной частоты 2f 14, усилитель обратной связи 15 и ключ замыкания обратной связи 16. Буквенные обозначения Н0 и U0 соответствуют начальным значениям поля подмагничивания, создаваемого миниатюрным соленоидом, и фиксированному значению выходного напряжения на измерительной катушке.
На фигуре 2 показана зависимость выходного напряжения датчика измерения деформаций от воздействующего магнитного поля при отключенной с помощью ключа 16 цепи обратной связи и различных растягивающих деформациях. Деформацию создают за счет подвешивания к АФМ грузов различной массы. Пересчет величины деформации АФМ в зависимости от величины подвешенного к АФМ груза происходит в соответствии с выражением: Δl=(0.5/30)*Δm, где: Δl величина деформации в миллиметрах, Δm - масса подвешиваемого груза в граммах.
На фигуре 3 приведены результаты измерений выходного напряжения датчика (Uon-U) от величины приложенных деформаций Δl.
Перед использованием датчик предварительно настраивается.
В ходе настройки датчика размыкают ключ обратной связи 16. Для регистрации сигналов датчика, связанных с приложенными деформациями, через АФМ 4 пропускают возбуждающий переменный ток амплитудой I0 (в пределах 5-10 мА) и частотой f (в пределах 5-10 кГц), создаваемый генератором переменного сигнала 11. Также к АФМ 4 прикладывают постоянное магнитное поле Н0, которое создается миниатюрным соленоидом 6 при протекании через него постоянного тока от источника постоянного тока 10. Создаваемое постоянное магнитное поле Н0 (величиной в пределах 10-12 Э), направленное вдоль оси АФМ, должно превышать в несколько раз значение поля анизотропии АФМ.
При воздействии возбуждающего переменного тока и постоянного магнитного поля на дифференциальной измерительной катушке 5 появляется переменный сигнал ЭДС на частоте 2f, который усиливается усилителем 12 и детектируется синхронным детектором 14 на частоте опорного сигнала 2f, создаваемого генератором удвоенной частоты 13. Выходной сигнал синхронного детектора 14 подключен через усилитель обратной связи к аналого-цифровому преобразователю.
В отсутствие воздействующей механической деформации на датчик, амплитуда сигнала электродвижущей силы на измерительной катушке 5 (соответствует точке пересечения нижней кривой МВВН (0.01 мм) и вертикальной линии Н0), фиксирована и имеет минимальное значение. При механическом растяжении исследуемого объекта (датчика) происходит увеличение амплитуды сигнала электродвижущей силы на катушке 5 (соответствует точке пересечения сдвинутой кривой МВВН (0.17 мм) и вертикальной линии Н0), за счет сдвига кривой малоуглового вращения вектора намагниченности в область значений больших магнитных полей. При еще большем механическом растяжении датчика (0.34 мм) сигнал дифференциальной измерительной катушки 5 достигает значения, соответствующего величине U0 и т.д. Величина деформации l0, соответствующая сигналу ЭДС дифференциальной измерительной катушки U0, соответствует условному начальному растяжению датчика и должна находиться примерно в центре между минимальной (0.01 мм) и максимальной (в нашем случае 0.67 мм) деформациями. Для сигнала дифференциальной измерительной катушки U0 определяют соответствующее значение выходного напряжения синхронного детектора 14 и подстраивают Uon так, чтобы оно сравнялось по величине с выходным напряжением синхронного детектора. Если после указанных установок замкнуть ключ обратной связи 16, то за счет действия цепи обратной связи амплитуда сигнала дифференциальной измерительной катушки будет удерживаться на уровне U0. При этом выходным сигналом, поступающим на вход АЦП, будет разностный сигнал (Uon-U), пропорциональный изменению величины деформации на Δl относительно исходной деформации l0. Следует отметить, что после установления указанных настроек и замыкания обратной связи, датчик начинает работать автоматически при включении питания схемы регистрации. При этом выходное напряжение датчика будет соответствовать текущему значению деформации (растяжению или сжатию) датчика относительно величины l0. В качестве примера на фигуре 3 приведены результаты измерений выходного напряжения датчика (Uon-U) от величины приложенных деформаций Δl с шагом 7.5 микрометров в широком диапазоне приложенных деформаций.
Таким образом, в предложенном датчике технический результат, заключающийся в линеаризации передаточной характеристики датчика и повышении точности в области малых деформаций, достигается за счет введения стабилизирующей цепи обратной связи и измерения сигнала обратной связи, пропорционального изменению дополнительного магнитного поля, которое прикладывается к АФМ для удержания фиксированного значения выходного напряжения дифференциальной измерительной катушки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик измерения механических деформаций | 2016 |
|
RU2654827C1 |
| Способ измерения характеристик аморфных ферромагнитных микропроводов | 2016 |
|
RU2632996C1 |
| ДАТЧИК ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ | 2013 |
|
RU2552124C1 |
| Датчик измерения механических напряжений на основе микропроводов с положительной магнитострикцией | 2020 |
|
RU2746765C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СЛАБЫХ МАГНИТНЫХ ПОЛЕЙ НА ОСНОВЕ ЭФФЕКТА ГИГАНТСКОГО МАГНИТНОГО ИМПЕДАНСА | 2018 |
|
RU2680165C1 |
| Способ контроля механических свойств металлопроката, изготовленного из ферромагнитных металлических сплавов и устройство для его осуществления | 2023 |
|
RU2807964C1 |
| Способ определения температуры аморфных ферромагнитных микропроводов при токовом нагреве | 2018 |
|
RU2696826C1 |
| Способ определения петель гистерезиса аморфных ферромагнитных микропроводов на основе железа | 2023 |
|
RU2814644C1 |
| Высокочувствительный магнитоимпедансный датчик градиентных магнитных полей | 2022 |
|
RU2784211C1 |
| Двухканальный пропорционально-дифференциальный феррозонд | 2023 |
|
RU2817510C1 |
Изобретение относится к измерительной технике и представляет собой датчик механических деформаций на основе аморфных ферромагнитных микропроводов. Датчик конструктивно объединяет магниточувствительный элемент и электронное измерительное устройство. Магниточувствительный элемент представляет собой вытянутую планарную растяжимую полимерную пластину, на которой с двух концов закреплен аморфный ферромагнитный микропровод, проходящий через измерительную катушку в виде встречно соединенных соленоидов из медной проволоки, которая, в свою очередь, размещена внутри соленоида. Электронное измерительное устройство объединяет генератор синусоидального электрического тока I частотой f, соединенный с аморфным ферромагнитным микропроводом, источник постоянного тока, соединенный с соленоидом, усилитель, соединенный с измерительной катушкой. Для формирования цепи обратной связи в электронное измерительное устройство введены генератор частоты 2f, синхронный детектор, усилитель обратной связи и ключ замыкания обратной связи. С помощью соленоида создают начальное магнитное поле Н0, направленное вдоль оси аморфного ферромагнитного микропровода и намагничивающее его до насыщения. Через аморфный ферромагнитный микропровод пропускают синусоидальный электрический ток I частотой f. Усиливают и детектируют сигнал дифференциальной измерительной катушки на удвоенной частоте генератора 2f и определяют величину деформации за счет введения стабилизирующей цепи обратной связи и измерения сигнала обратной связи, пропорционального изменению дополнительного магнитного поля, которое прикладывается к аморфному ферромагнитному микропроводу для удержания фиксированного значения выходного напряжения дифференциальной измерительной катушки. Техническим результатом при реализации заявленного решения выступает расширение функциональных возможностей датчика, а именно линеаризация передаточной характеристики датчика за счет введения стабилизирующей цепи связи по воздействующему магнитному полю и соответствующее повышение точности в области малых деформаций. 3 ил.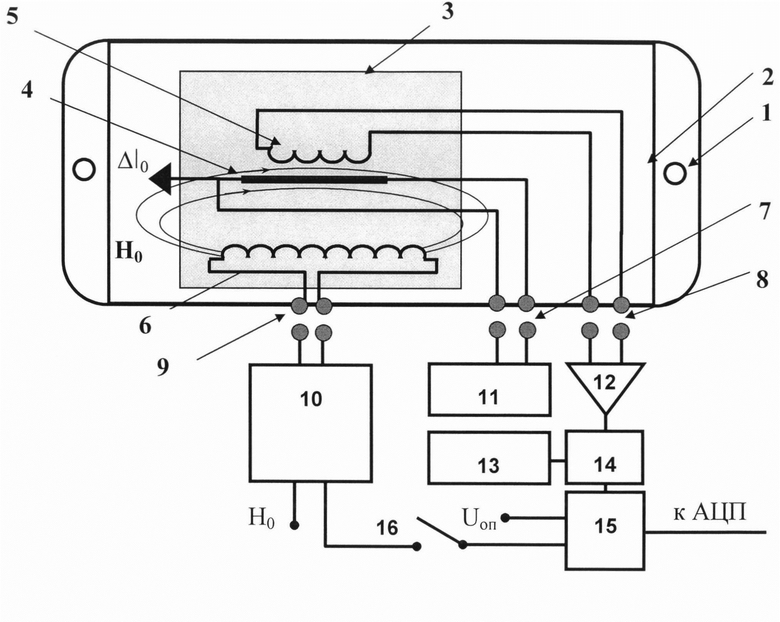
Датчик измерения механических деформаций, состоящий из прямоугольной пластины, выполненной из полимерного материала с поперечными разрезами, обеспечивающими возможность ее растяжения в продольном направлении, и с посадочным местом в виде центрально-симметричного углубления для миниатюрного соленоида, содержащего дифференциальную измерительную катушку с размещенным внутри нее магниточувствительным элементом, выполненным из аморфного ферромагнитного микропровода, подключенного к первой паре контактных площадок, при этом дифференциальная измерительная катушка подключена ко второй паре контактных площадок, а миниатюрный соленоид подключен к третьей паре контактных площадок, в свою очередь, генератор переменного тока частоты f соединен с первой парой контактных площадок, вход усилителя сигналов дифференциальной измерительной катушки соединен со второй парой контактных площадок, а источник постоянного тока соединен с третьей парой контактных площадок, отличающийся тем, что в него дополнительно введены генератор переменного тока удвоенной частоты 2f, синфазный с генератором частоты f, синхронный детектор сигнала удвоенной частоты 2f, усилитель обратной связи и ключ замыкания обратной связи, причем дополнительно введенный генератор частоты 2f соединен с дополнительно введенным синхронным детектором сигнала удвоенной частоты, который, в свою очередь, соединен с усилителем и с дополнительно введенным усилителем обратной связи с другой стороны, а усилитель обратной связи подключен к аналого-цифровому преобразователю и через дополнительно введенный ключ замыкания обратной связи - к источнику постоянного тока.
| СПОСОБ ИЗГОТОВЛЕНИЯ ДАТЧИКОВ ДЛЯ КОНТРОЛЯ ЦИКЛИЧЕСКИХ ДЕФОРМАЦИЙ | 2012 |
|
RU2507478C1 |
| Способ изготовления форм плоской печати | 1960 |
|
SU143655A1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2010 |
|
RU2437070C2 |
| US 5650570 A1, 22.07.1997 | |||
| US 2004103725 A1, 03.06.2004.. | |||

