Устройство карданова подвеса для увеличения диапазона углов поворота изделия относительно гиростабилизированной платформы (ГСП) относится к области приборостроения и может быть использовано в системах управления подвижных объектов (летательных аппаратов) с использованием гиростабилизированной платформы, установленной на изделии в кардановом подвесе.
Известен способ увеличения диапазона углов поворота изделия относительно ГСП, установленной на изделии в кардановом подвесе (RU 2552857 от 25.11.2013 г.). Увеличение углов поворота вокруг продольной, поперечной и вертикальной осей изделия относительно ГСП, установленной на изделии в кардановом подвесе, обеспечивают за счет автоматического перевода трехосного карданова подвеса по сигналам от вычислительного устройства из режима работы с «ракетными» углами в режим работы с «самолетными» углами и обратно на заданное (требуемое) число раз с помощью двигателя механизма разворота (ДМР), установленного на дополнительной наружной раме карданова подвеса ГСП, при этом ось вращения дополнительной рамы относительно летательного аппарата устанавливают коллинеарно вертикальной оси летательного аппарата.
Рассматриваемая схема четырехосного карданова подвеса позволяет обеспечить:
- совмещение в одном приборе функции двух приборов: определение «ракетных» и «самолетных» углов ориентации изделия, используя предлагаемый механизм разворота рам четырехосного карданова подвеса;
- улучшение технических характеристик изделия: повышение маневренности изделия, экономии энергетики;
- сохранение таких же точностных характеристик комплекса командных приборов (ККП), как в схеме с трехосным кардановым подвесом;
- стабилизация ГСП не изменяется и работает в режиме трехосного гироскопического стабилизатора (ТГС);
- масса и моменты инерции ГСП не увеличиваются;
- жесткость конструкции между гироблоками и двигателями стабилизации сохраняется, как и в трехосном ТГС;
- переключение прибора из режима работы с «ракетными» углами в режим работы с «самолетными» углами и обратно осуществляется разворотом трехосного карданова подвеса относительно корпуса изделия на углы от нуля до ±90 градусов и обратно по сигналам от вычислительного устройства;
- внешние возмущения на ГСП при работающем и неработающем ДМР передаются через трение в подшипниках, установленных на осях карданова подвеса;
- при всех режимах работы с «ракетными» и «самолетными» углами, а также при переходе от «ракетных» углов к «самолетным» углам и обратно необходимо следить, чтобы угол Θ2 по промежуточной оси трехосного карданова подвеса не превышал пределов ±70 градусов.
В патенте RU 2552857 отмечено, что дополнительная рама может иметь различное конструктивное исполнение, обеспечивающее минимальный вес и габариты прибора.
Анализ показывает, что во всех режимах работы используется один и тот же ТГС, а дополнительная рама служит только для перевода работы ТГС из одного режима в другой.
Требования к ТГС и к наружной раме различны.
Основные требования к ТГС:
- обеспечить заданную максимально возможную точность определения угловой ориентации и движения центра масс изделия относительно инерциального пространства;
- изготовление ТГС в целом и его комплектующих (акселерометров, гироблоков, датчиков углов, двигателей стабилизации, элементов системы прицеливания) должно быть высокоточным, прецизионным;
- должны строго выдерживаться режимы температуры, давления, влажности;
- должна быть обеспечена точная балансировка вокруг осей карданова подвеса ТГС;
- должна быть обеспечена требуемая жесткость и равножесткость конструкции гироблоков и карданова подвеса;
- трение в подшипниках гироблоков и карданова подвеса должно быть минимальным;
- влияние внешних воздействий на прибор (вибраций, магнитно-электрических полей и др.) должно быть сведено к минимуму;
- габаритно-массовые характеристики должны быть минимальными и удовлетворять требованиям заказчика.
Следует подчеркнуть, что в рассматриваемой конструкции ТГС для функционирования прибора во всех режимах работы необходимо, чтобы угол поворота вокруг промежуточной оси подвеса ГСП не превышал пределов ±70 градусов.
Основные требования к дополнительной наружной раме:
- дополнительная наружная рама должна обеспечивать поворот карданова подвеса ТГС вокруг вертикальной оси изделия на угол от нуля до ±90 градусов и обратно заданное (требуемое) число раз;
- угол поворота рамы определяют по показаниям датчика угла, который устанавливают на эту ось. Точность этого датчика может быть на порядок ниже точности датчиков углов, которые устанавливают на оси карданова ТГС;
- двигатель механизма разворота ТГС должен поворачивать карданов подвес относительно изделия со скоростью более 60 градусов в секунду;
- ось вращения наружной рамы должна быть коллинеарна вертикальной оси изделия и ортогональна наружной оси подвеса ТГС.
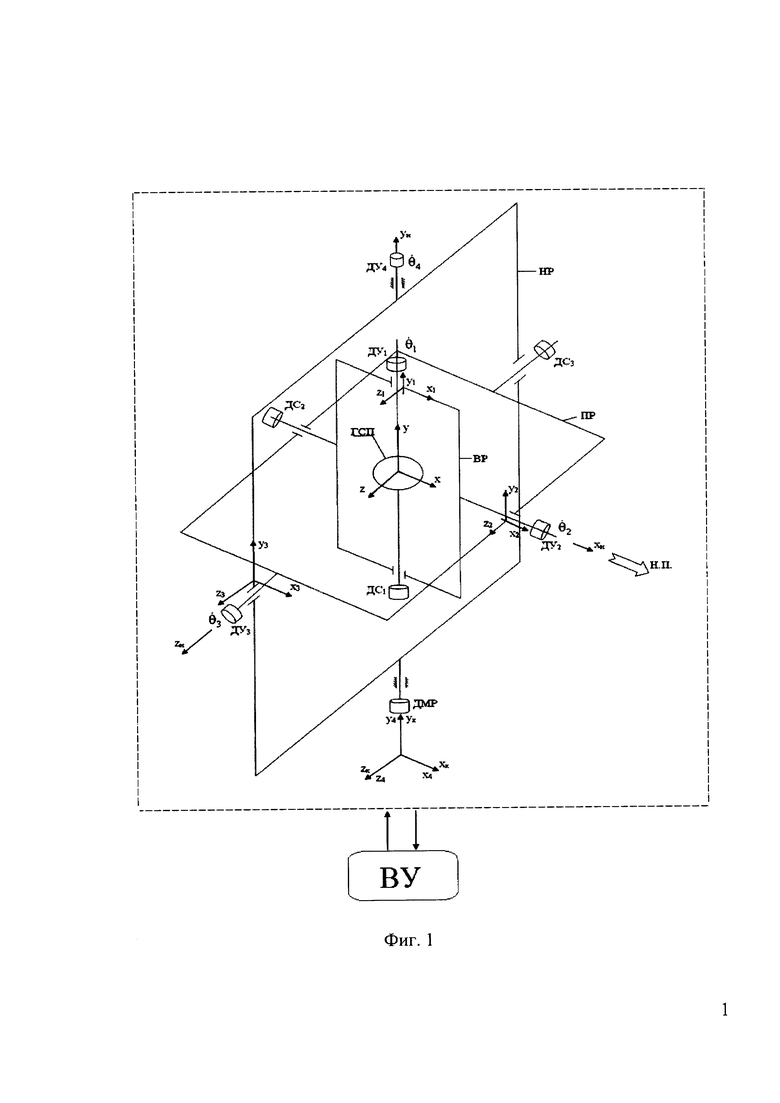
Кинематическая схема крепления дополнительной рамы внутри корпуса изделия приведена на фиг. 1.
XYZ - система координат, связанная с ГСП;
X1Y1Z1, X2Y2Z2, X3Y3Z3, X4Y4Z4 - системы координат, связанные с внутренней, промежуточной, наружной и дополнительной наружной рамами;
XКYКZК - система координат, связанная с корпусом;
XИYИZИ - система координат, связанная с изделием;
ДС1, ДС2, ДС3 - двигатели силовой стабилизации;
ДУ1, ДУ2, ДУ3, ДУ4 - датчики углов (ДУ);
ДМР - двигатель механизма разворота;
ВУ - вычислительное устройство;
Θ1, Θ2, Θ3, Θ4 - углы поворота.
Дополнительную наружную раму можно установить как внутри корпуса ТГС, так и снаружи.
Задачей настоящего изобретения является разработка устройства карданова подвеса для увеличения диапазона углов поворота изделия без изменения конструкции ТГС.
Поставленная задача решается тем, что предложено устройство карданова подвеса для увеличения диапазона углов поворота изделия, включающее ТГС с ВУ, при этом ТГС через закрепленные на нем две дополнительные полуоси с подшипниками установлен на переходной раме, которая жестко закреплена на корпусе изделия и на которой установлен ДМР с редуктором, выходная шестерня которого закреплена на одной из полуосей ТГС, на другой полуоси установлен ДУ, по которому определяют угол поворота карданова подвеса ТГС вокруг вертикальной оси изделия. Вход ДМР соединен с выходом ВУ, выход ДУ соединен с входом ВУ.
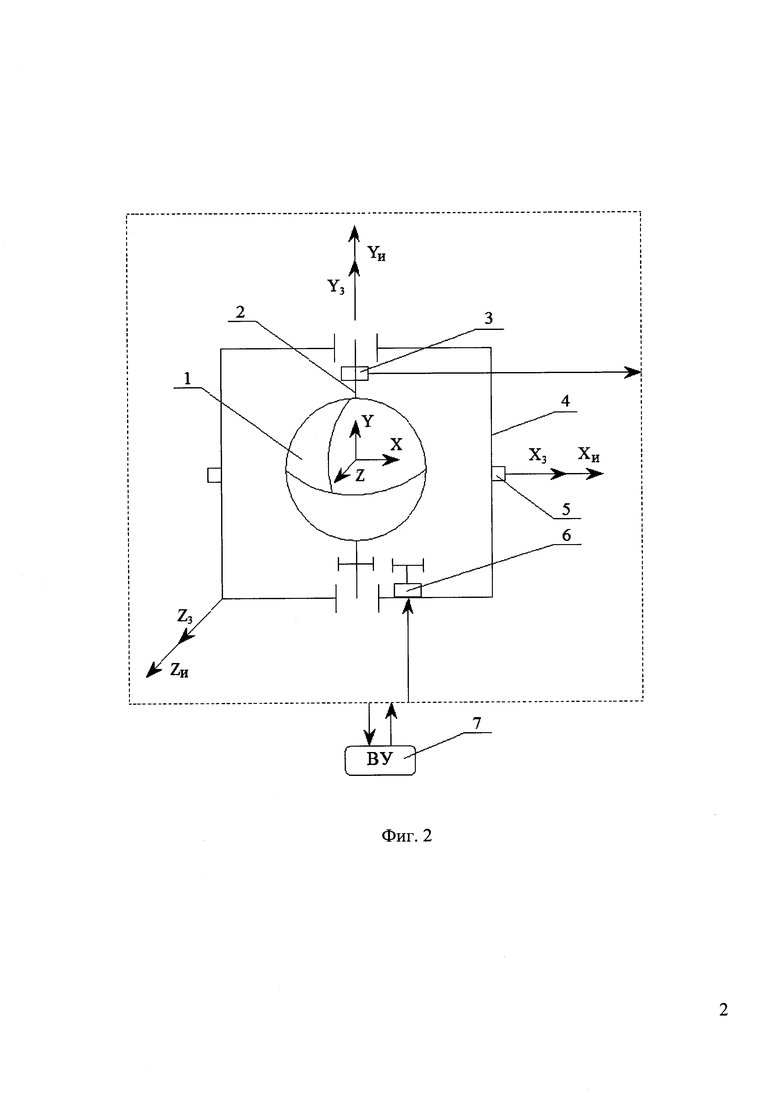
Предлагаемая кинематическая схема устройства карданова подвеса для увеличения диапазона углов поворота изделия относительно ГСП с креплением дополнительной рамы снаружи корпуса ТГС приведена на фиг. 2, где
XYZ - система координат, связанная с ГСП;
X3Y3Z3 - система координат, связанная с переходной рамой;
XИYИZИ - система координат, связанная с изделием;
1 - корпус ТГС;
2 - полуось;
3 - ДУ;
4 - переходная рама;
5 - изделие;
6 - ДМР с редуктором;
7 - ВУ.
Корпус ТГС через закрепленные на нем две полуоси с подшипниками установлен на переходной раме, на которой также установлен ДМР с редуктором, выходная шестерня которого соединена с шестерней, закрепленной на одной из полуосей ТГС. Вход ДМР соединен с выходом вычислительного устройства для автоматического переключения ТГС из режима работы с «ракетными» углами в режим работы с «самолетными» углами и обратно требуемое число раз. Переходная рама жестко закреплена на корпусе изделия.
На другой полуоси установлен ДУ, по которому определяют угол поворота карданова подвеса ТГС вокруг вертикальной оси изделия.
В изделиях с «самолетными» углами наружную ось ТГС крепят коллинеарно продольной оси изделия. В изделиях, требующих увеличенных углов поворота вокруг продольной, поперечной и вертикальной осей изделия и работающих в режимах «ракета» - «самолет» и обратно, наружную ось ТГС в исходном положении предпочтительно устанавливать коллинеарно поперечной оси ракеты, как показано на фиг. 2. В этом случае дополнительной наружной рамой предлагаемого устройства является корпус ТГС.
По информации чувствительных элементов ТГС в ВУ определяют угловую ориентацию и линейное перемещение центра масс изделия относительно инерциального пространства.
Крепление дополнительной рамы снаружи корпуса ТГС экономически более выгодно, так как можно использовать унифицированный ТГС. Унифицированный ТГС можно использовать в изделиях с ракетными углами, где наружную ось ТГС устанавливают коллинеарно поперечной оси изделия.
Таким образом, предложено устройство карданова подвеса для увеличения диапазона углов поворота изделия, включающее ТГС с вычислительным устройством. ТГС через закрепленные на нем две дополнительные полуоси с подшипниками установлен на переходной раме, которая жестко закреплена на корпусе изделия. На переходной раме установлен ДМР с редуктором, выходная шестерня которого закреплена на одной из полуосей ТГС. На другой полуоси установлен ДУ, по которому определяют угол поворота ТГС относительно изделия вокруг вертикальной оси. Выход ДУ соединен с входом ВУ, а вход ДМР соединен с выходом ВУ.
Техническим результатом предлагаемого устройства являются:
- расширение функциональных возможностей изделия;
- сохранение точностных характеристик ККП, как и в схемах с ТГС;
- уменьшение стоимости ККП за счет использования унифицированных ТГС;
- упрощение изготовления и эксплуатации ККП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УВЕЛИЧЕНИЯ ДИАПАЗОНА УГЛОВ ПОВОРОТА ИЗДЕЛИЯ ОТНОСИТЕЛЬНО ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ, УСТАНОВЛЕННОЙ НА ИЗДЕЛИИ В КАРДАННОВОМ ПОДВЕСЕ | 2013 |
|
RU2552857C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ РАКЕТЫ-НОСИТЕЛЯ И ВЫВОДИМОГО ЕЮ НА ОРБИТУ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2415383C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |
Изобретение относится к области приборостроения и может быть использовано в системах управления подвижных объектов (летательных аппаратов) с использованием гиростабилизированной платформы, установленной на изделии в кардановом подвесе. Устройство карданова подвеса для увеличения диапазона углов поворота изделия содержит трехосный гиростабилизатор (ТГС) с вычислительным устройством, при этом ТГС через закрепленные на нем две дополнительные полуоси с подшипниками установлен на переходной раме, которая жестко закреплена на корпусе изделия и на которой установлен двигатель механизма разворота (ДМР) с редуктором, выходная шестерня которого закреплена на одной из полуосей ТГС, при этом вход ДМР соединен с выходом вычислительного устройства, на другой полуоси установлен датчик угла, по которому определяют угол поворота карданова подвеса ТГС вокруг вертикальной оси изделия, выход которого соединен с входом вычислительного устройства. Технический результат - расширение функциональных возможностей изделия при сохранении точностных характеристик прибора. 2 ил.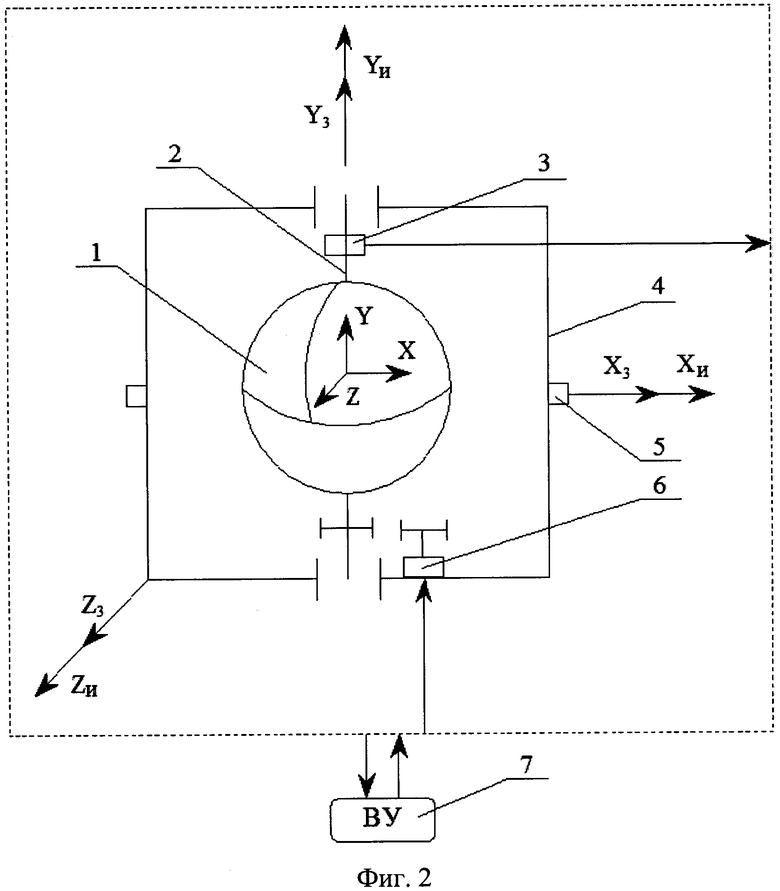
Устройство карданова подвеса для увеличения диапазона углов поворота изделия, включающее трехосный гиростабилизатор (ТГС) с вычислительным устройством, отличающееся тем, что ТГС через закрепленные на нем две дополнительные полуоси с подшипниками установлен на переходной раме, которая жестко закреплена на корпусе изделия и на которой установлен двигатель механизма разворота (ДМР) с редуктором, выходная шестерня которого закреплена на одной из полуосей ТГС, при этом вход ДМР соединен с выходом вычислительного устройства, на другой полуоси установлен датчик угла, по которому определяют угол поворота карданова подвеса ТГС вокруг вертикальной оси изделия, выход которого соединен с входом вычислительного устройства.
| СПОСОБ УВЕЛИЧЕНИЯ ДИАПАЗОНА УГЛОВ ПОВОРОТА ИЗДЕЛИЯ ОТНОСИТЕЛЬНО ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ, УСТАНОВЛЕННОЙ НА ИЗДЕЛИИ В КАРДАННОВОМ ПОДВЕСЕ | 2013 |
|
RU2552857C1 |
| Подвес трехосного гиростабилизатора киноаппарата | 1981 |
|
SU989321A1 |
| ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 2000 |
|
RU2157966C1 |
| WO 2015162247 A1, 29.10.2015 | |||
| US 5868031 A1, 09.02.1999. | |||

