Изобретение относится к транспортному машиностроению, в частности к гидравлическим системам управления транспортными средствами, преимущественно карьерными самосвалами.
Известна система рулевого управления для большегрузных транспортных средств [1, Мариев П.Л, Егоров А.Н. и др. Карьерные самосвалы особо большой грузоподъемности. Проектирование, технологии, маркетинг / П.Л. Мариев и др., Минск: Интегралполиграф, 2008, стр. 124-126, рис. 2.6.1], содержащая усилитель потока рабочей жидкости под давлением, сообщенный с распределителем рулевого механизма и с полостями двух одноштоковых цилиндров.
Недостатком такой системы является то, что с ее помощью можно осуществлять рулевое управление по схеме поворота передних управляемых колес большегрузного транспортного средства с соблюдением точных параметров угла поворота этих колес от выбранных конструктивных параметров колесной базы, что снижает универсальность применения гидросистемы и не подходит для приемлемой маневренности тяжеловесных большегрузных транспортных средств, например бронетехники или карьерных самосвалов сверхвысокой грузоподъемности (свыше 450 тонн), для которых необходим согласованный поворот не только переднего, но и заднего моста.
Известна более универсальная и эффективная для маневренности большегрузных транспортных средств система их рулевого управления [2, Патент RU 2488508, МПК B62D 5/06, B62D 15/00, приоритет 24.04.2012, опубликован 27.07.2013]. Она содержит два усилителя потока рабочей жидкости под давлением, один из которых сообщен через распределитель рулевого механизма с полостями двух двухштоковых цилиндров, а другой из которых сообщен с полостями дополнительных двухштоковых цилиндров через делитель потока, и два дополнительных распределителя, связанных с одним из штоков дополнительных двухштоковых цилиндров, другие штоки которых связаны с предварительно сжатыми центрирующими пороговыми пружинами.
Недостатком аналога [2] является сложность конструкции и технического обслуживания системы рулевого управления из-за наличия в ней двух усилителей потока, которые запитываются от двух гидробаков через две насосные станции, а также из-за наличия двух штоков в двухштоковых основных и дополнительных цилиндрах и связи их штоков с дополнительными элементами системы - двух дополнительных распределителей и предварительно сжатых центрирующих пороговых пружин.
Такая система рулевого управления позволяет применить ее в классической схеме поворота управляемых колес тяжеловесных транспортных средств относительно их мостов. Однако она ограничивает увеличение грузоподъемности тяжеловесных транспортных средств.
Более прогрессивной схемой их поворота является управление поворотом самих мостов относительно друг друга, например, установленных на опорно-поворотных кругах, вращаемых с помощью цилиндров гидросистемы.
Для такой схемы поворота известна система рулевого управления, применяемая для большегрузных транспортных средств [3, Самосвал БелАЗ 75710. Руководство по эксплуатации 75710-3902015 РЭ, г. Жодино, БелАЗ, стр. 9-1-9-3] и принятая за прототип изобретения. Данная система, в отличие от аналога [2], содержит не два, а один усилитель потока рабочей жидкости под давлением и меньшее количество управляющих и соединительных элементов. Это обеспечивается ее оригинальной схемой, которая включает в себя один усилитель потока рабочей жидкости под давлением, соединенный со штоковыми полостями четырех цилиндров обоих мостов, и два распределителя, один из которых соединен с рулевым механизмом и сообщен своими выходами с бесштоковыми полостями правого и левого цилиндров управления поворотом опорно-поворотного круга переднего моста транспортного средства, а другой - соединен с рулевым механизмом и сообщен своими выходами с бесштоковыми полостями правого и левого цилиндров управления поворотом опорно-поворотного круга заднего моста транспортного средства.
Оба распределителя снабжены электромагнитными клапанами, соединенными с релейным блоком управления, который также соединен с датчиками крайних положений опорно-поворотного круга переднего моста транспортного средства, и с датчиком нейтрального положения опорно-поворотного круга заднего моста транспортного средства. При этом для функционирования упомянутых датчиков и ограничения поворота мостов карьерного самосвала специально установлены попарно упоры, а между ограничителями на остове закреплены ограничители.
Конструкция системы прототипа [3] хотя и проще, чем конструкция системы аналога [2], однако из-за того, что в системе по прототипу [3] заложен принцип поочередного поворота управляемых мостов большегрузного транспортного средства, в ней применяется удвоенное количество элементов и соединительных гидролиний. Это также усложняет техническое обслуживание системы.
Кроме того, она не обеспечивает возможность одновременного поворота управляемых мостов большегрузного транспортного средства, что снижает ее функциональные возможности, а также функциональные возможности для маневренности самого транспортного средства.
Применение же для такого принципа поворота карьерного самосвала упомянутых трех датчиков и сопутствующих им ограничителей поворота и упоров для управляемых мостов еще больше усложняет конструкцию и техническое обслуживание как системы рулевого управления данного большегрузного транспортного средства, так и его самого.
Задача изобретения состоит в достижении технического результата, направленного на упрощение конструкции и технического обслуживания системы рулевого управления, а также на расширение ее функциональных возможностей при применении в обеспечении маневренности большегрузного транспортного средства.
Поставленная задача для изобретения решается тем, что в системе рулевого управления для большегрузных транспортных средств, содержащей усилитель потока с распределителем выбора направления потока рабочей жидкости под давлением, соединенный с рулевым механизмом и со штоковыми полостями правого и левого цилиндров управления поворотом опорно-поворотного круга переднего моста, и два распределителя, один из которых соединен с рулевым механизмом и сообщен своими выходами с бесштоковыми полостями правого и левого цилиндров управления поворотом опорно-поворотного круга переднего моста большегрузного транспортного средства, а второй - не соединен с рулевым механизмом, снабжен электромагнитным блоком управления и сообщен своими выходами со штоковыми и бесштоковыми полостями правого и левого цилиндров управления поворотом опорно-поворотного круга заднего моста большегрузного транспортного средства, причем с электромагнитным блоком управления соединено управляющее устройство, которое соединено также с датчиками, имеются отличительные признаки: электромагнитный блок управления снабжен пропорциональными электромагнитами и датчики установлены с возможностью измерения текущих углов поворота опорно-поворотных кругов, а в качестве управляющего устройства применен программируемый контроллер, который связан с пропорциональными электромагнитами и с датчиками.
Снабжение электромагнитного блока управления пропорциональными электромагнитами позволит с достаточной точностью обеспечивать поворот опорно-поворотного круга заднего моста большегрузного транспортного средства по положению переднего.
Установка датчиков с возможностью измерения текущих углов поворота опорно-поворотных кругов направлено на упрощение конструкции и технического обслуживания системы рулевого управления, так как не потребуется обязательного применения и установки, как в прототипе [3], для функционирования датчиков крайних и среднего положения мостов сопутствующих им ограничителей поворота и упоров. При этом достаточно двух датчиков вместо трех.
Применение в качестве управляющего устройства программируемого контроллера, который связан с упомянутыми пропорциональными электромагнитами и с датчиками, позволит создать более простой принцип поворота заднего моста по положению переднего, что кроме упрощения конструкции системы также обеспечит управление распределителем, не соединенным с рулевым механизмом по величине угла рассогласования, контролируемого упомянутыми датчиками. При этом улучшатся показатели по быстродействию и точности управления поворотом и эксплуатационные показатели большегрузного транспортного средства, а также расширятся возможности выполнения различных поворотов (одним из мостов, двумя мостами в противоположном или в одном направлении), что улучшит маневренность такого транспортного средства. Дополнительные отличительные признаки изобретения:
- один датчик установлен на остове и связан рычажным механизмом с опорно-поворотным кругом переднего моста, а второй датчик установлен на остове и связан рычажным механизмом с опорно-поворотным кругом его заднего моста большегрузного транспортного средства;
- применены датчики электромагнитного типа, связанные рычажными механизмами с опорно-поворотными кругами большегрузного транспортного средства.
В совокупности все отличительные признаки изобретения позволят применить такую систему в прогрессивной схеме поворота большегрузных транспортных средств по принципу поворота заднего моста по положению переднего с помощью легкого и точного управления, что обеспечивает создание тяжеловесных транспортных средств грузоподъемностью свыше 450 тонн.
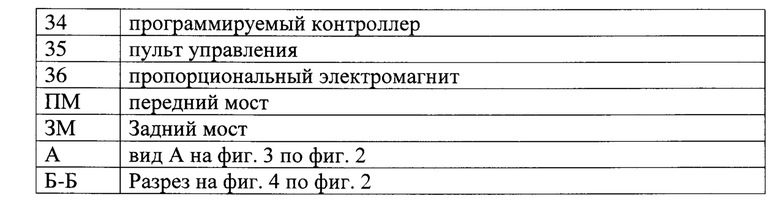
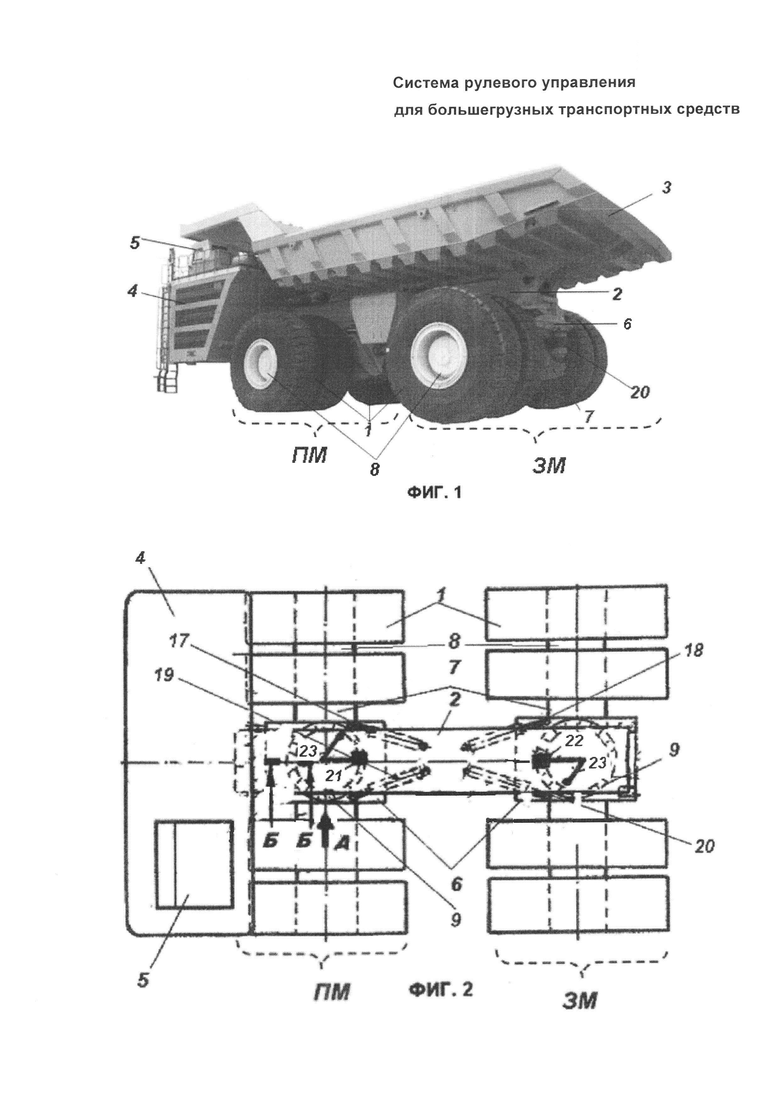
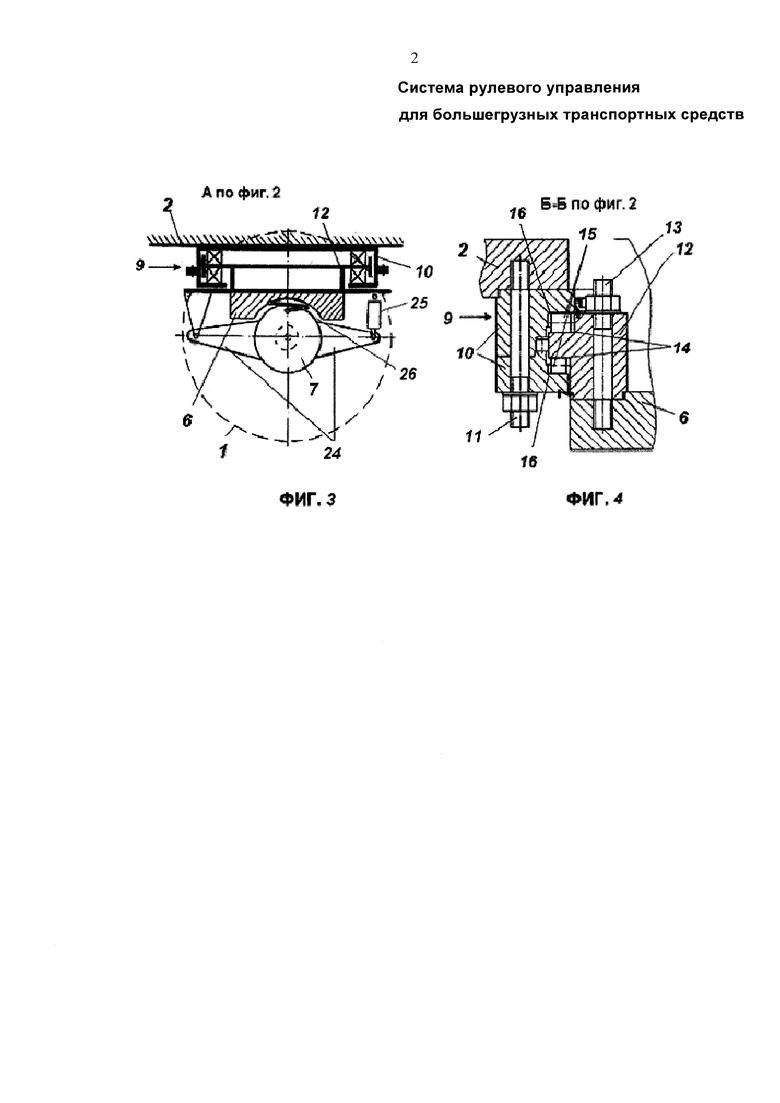
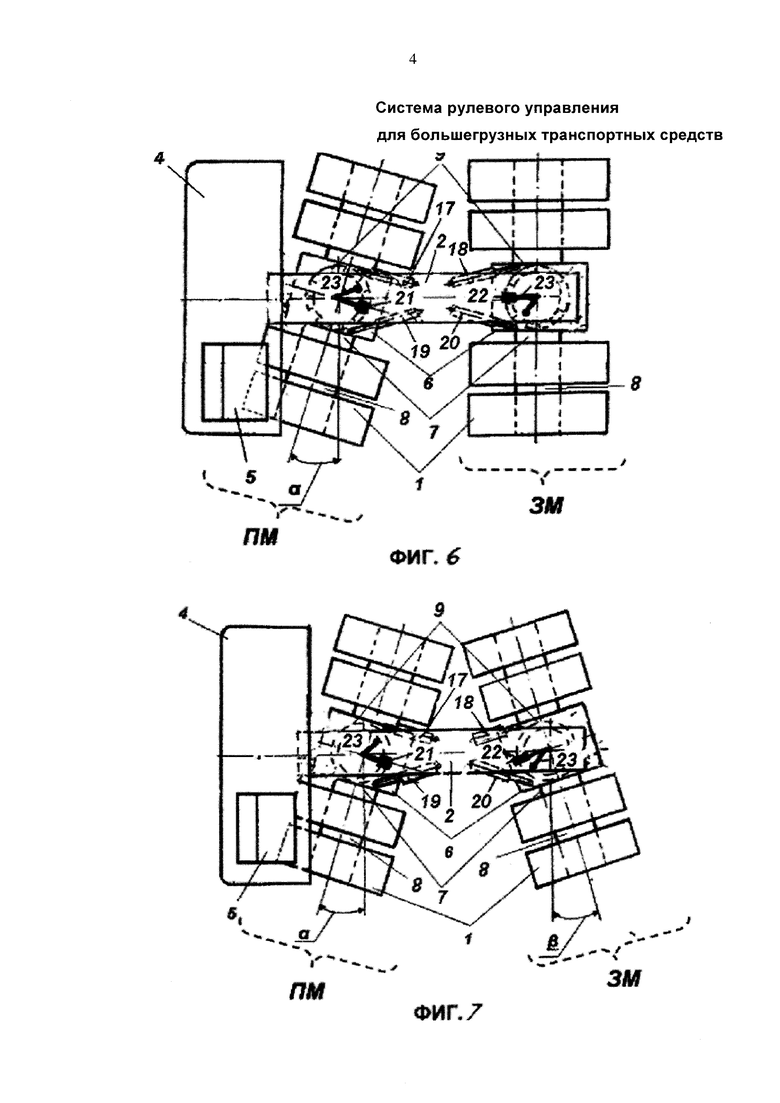
Сущность изобретения поясняется иллюстрациями, где на фиг. 1 показан, в качестве примера, общий вид большегрузного транспортного средства, в котором может быть установлена система рулевого управления по изобретению; на фиг. 2 - схема расположения мостов такого транспортного средства; на фиг. 3 - вид А по фиг. 2, с изображением схемы устройства моста; на фиг. 4 - разрез Б-Б по фиг. 2 на частично показанное устройство опорно-поворотного круга по фиг. 3; на фиг. 5 показана функциональная схема системы рулевого управления применительно к схеме расположения мостов большегрузного транспортного средства по фиг. 2; на фиг. 6 - то же, что и на фиг. 2, но с поворотом одного моста большегрузного транспортного средства; на фиг. 7 - то же, что и на фиг. 6, но с поворотом двух его мостов.
Устройство по изобретению применяется для большегрузных транспортных средств и устанавливается, например, на карьерном самосвале (фиг. 1), имеющем в качестве движителей колеса 1 переднего моста ПМ и заднего моста ЗМ, закрепленные подвижно на остове 2, на котором установлена грузовая платформа 3 и моторный отсек 4 с кабиной 5.
Каждый мост ПМ и ЗМ карьерного самосвала содержит поворотный корпус 6 с центральным корпусом 7, соединенным с бортовыми корпусами 8, на которых установлены колеса 1. Поворотные корпуса 6 снабжены опорно-поворотным кругом 9 (фиг. 1-4), состоящим из неподвижного составного кольца 10 (фиг. 3, 4), которое закреплено шпильками 11 (фиг. 4) на остове 2, и подвижного цельного кольца 12, которое закреплено шпильками 13 на поворотном корпусе 6. Подвижное цельное кольцо 12 снабжено сверху и снизу беговыми дорожками 14, контактирующими с телами качения - роликами 15, расположенными между ним и беговыми дорожками 16 неподвижного составного кольца 10.
Причем каждый опорно-поворотный круг 9 присоединен к остову 2 и выполнен с возможностью своего поворота (фиг. 6, 7) направо и налево с помощью соединенных с поворотным корпусом 6 и с остовом 2 правых цилиндров 17, 18 и левых цилиндров 19, 20 системы рулевого управления (фиг. 2, 5-7) карьерного самосвала (фиг. 1), в которую также входят датчики 21 и 22 (фиг. 2, 5-7), выполненные с функцией измерения текущего угла поворота опорно-поворотных кругов 9 соответственно переднего моста ПМ и заднего моста ЗМ и которые установлены на этих кругах.
Применены датчики 21, 22 электромагнитного типа, установленные на остове 2 и связанные рычажными механизмами 23 с поворотными корпусами 6 большегрузного транспортного средства.
Центральные корпуса 7 соединены с поворотными корпусами 6 через центральные рычаги 24 (фиг. 3), плечи которых соединены с элементами подвески 25, например с амортизаторами или/и демпферами, которые соединены также с поворотными корпусами 6. Центральные корпуса 7 соединены с поворотным корпусом 6 с помощью монтажного элемента, например двуплечего шарнирного рычага 26.
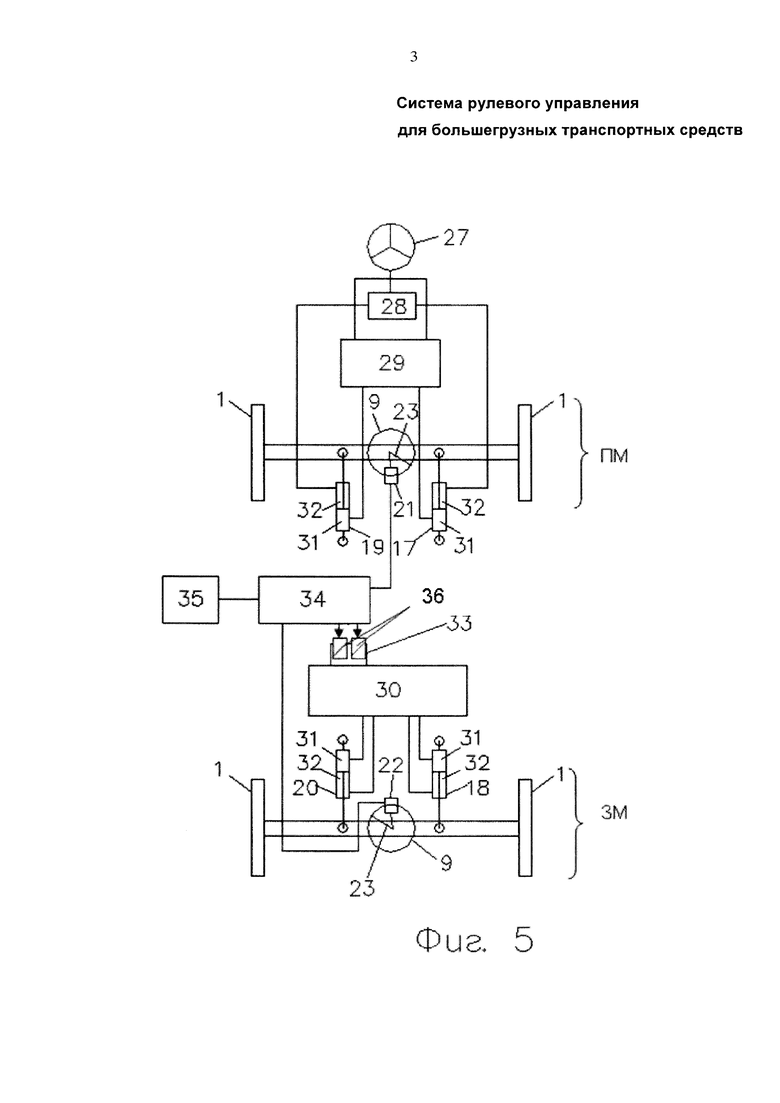
Система рулевого управления (фиг. 5) для большегрузных транспортных средств, таких как карьерный самосвал (фиг. 1), включает в себя также рулевой механизм 27, усилитель потока с распределителем выбора направления потока рабочей жидкости под давлением 28, два распределителя 29, 30, которые входят в гидравлическую часть системы рулевого управления, содержащую (не показано) традиционные элементы для транспортных средств, например гидронасос, бак, пневмогидроаккумуляторы, объединенные в коллекторный накопитель энергии, фильтры, предохранительные, обратные, разгрузочные, двухмагистральные, приоритетные и редукционные клапаны, трубопроводы, шланги, штуцеры и т.д.
Распределитель 29 соединен с рулевым механизмом 27 и сообщен своими выходами с бесштоковыми полостями 31 правого и левого цилиндров 17 и 19, а усилитель потока с распределителем выбора направления потока рабочей жидкости под давлением 28 соединен с рулевым механизмом 27 и сообщен своими выходами со штоковыми полостями 32 правого и левого цилиндров 17 и 19 управления поворотом опорно-поворотного круга 9 переднего моста ПМ большегрузного транспортного средства. Распределитель 30 не соединен с рулевым механизмом 27, снабжен электромагнитным блоком управления 33 и сообщен своими выходами с бесштоковыми и штоковыми полостями соответственно 31 и 32 правого и левого цилиндров соответственно 18 и 20 управления поворотом опорно-поворотного круга 9 заднего моста ПМ большегрузного транспортного средства.
С электромагнитным блоком управления 33 распределителя 30 соединено управляющее устройство, в качестве которого применен программируемый контроллер 34, который соединен также с датчиками 21 и 22.
В кабине 5 (фиг. 1) транспортного средства находится пульт управления 35 (фиг. 5) работой программируемого контроллера 34.
Блок управления 33 снабжен пропорциональными электромагнитами 36, с которыми соединен программируемый контроллер 34.
Контроль исправности датчиков 21 и 22, контроль электромагнитного блока 33 с пропорциональными электромагнитами 36 распределителя 30, контроль состояния гидравлической части и диагностика аварийных ситуаций производится с помощью диагностических приборов (не показаны), встроенных в систему рулевого управления, с выводом результатов на электронную панель приборов в кабине 5 (фиг. 1) большегрузного транспортного средства.
Принцип работы гидросистемы рулевого управления (фиг. 5) для большегрузных транспортных средств следующий.
После пуска двигателя (не показан) в моторном отсеке 4 (фиг. 1) карьерного самосвала поток рабочей жидкости подается к усилителю потока с распределителем выбора направления потока рабочей жидкости под давлением 28 и к распределителям 29 и 30 (фиг. 5), которые находятся в нейтральном положении. При движении карьерного самосвала по прямой (фиг. 2) цилиндры 17-20 (фиг. 2, 5) находятся также в нейтральном положении и к ним не поступает рабочая жидкость под давлением.
Изначально, например, программируемый контроллер 34 настроен на схему поворота (фиг. 6) большегрузного транспортного средства только с помощью переднего моста ПМ.
Например, при повороте колеса рулевого механизма 27 вправо рабочая жидкость от усилителя потока с распределителем выбора направления потока рабочей жидкости под давлением 28 (фиг. 5) поступает в штоковую полость 32 правого цилиндра 17, а от распределителя 29 в бесштоковую полость 31 левого цилиндра 19, из штоковой полости 32 которого, а также из бесштоковой полости 31 правого цилиндра 17 рабочая жидкость поступает на слив. Происходит поворот (фиг. 6) переднего моста ПМ большегрузного транспортного средства вправо. При этом в зависимости от величины перемещения колеса рулевого механизма 27 происходит пропорциональное изменение объема рабочей жидкости в упомянутых бесштоковых и штоковых полостях 31, 32 правого и левого цилиндров 17, 19. Это вызывает поворот на определенный угол подвижного цельного кольца 12 (фиг. 3, 4) опорно-поворотного круга 9 по роликам 15 относительно неподвижного составного кольца 10 переднего моста ПМ (фиг. 6), заставляя его переместиться на соответствующий угол относительно остова 2 большегрузного транспортного средства, обеспечивая его необходимый поворот.
Аналогично происходит и поворот влево большегрузного транспортного средства его передним мостом ПМ.
При необходимости выполнения большегрузным транспортным средством маневров с меньшим радиусом (более крутого его поворота), например вправо, на пульте управления 35 (фиг. 5) переключают программируемый контроллер 34 в режим работы с одновременным поворотом переднего ПМ и заднего ЗМ мостов. В результате при повороте рулевого механизма 27 в выбранном направлении происходит поворот переднего моста ПМ описанным выше способом и одновременно рабочая жидкость от распределителя 30 поступает в штоковую полость 32 правого цилиндра 18 и в бесштоковую полость 31 левого цилиндра 20, из штоковой полости 32 которого, а также из бесштоковой полости 31 правого цилиндра 18 рабочая жидкость поступает на слив. Происходит поворот (фиг. 7) заднего моста ЗМ большегрузного транспортного средства вправо, т.е. в обратную сторону от поворота переднего моста ПМ. При этом происходит аналогичное выше описанное следящее действие системы.
Аналогично происходит и поворот влево большегрузного транспортного средства за счет поворота влево передним мостом ПМ и поворота заднего моста ЗМ вправо.
Возможны и другие режимы поворота (не показаны), после выбора нужного режима работы программируемого контроллера 34 (фиг. 5) через пульт 35, например, когда поворачивается только задний мост ЗМ или передний и задний мост поворачиваются синхронно в одну и ту же сторону.
В описанных выше случаях функционирования гидросистемы рулевого управления при одновременном повороте переднего ПМ и заднего моста ЗМ, например по схеме, показанной на фиг. 7, программируемый контроллер 34 управляет избирательно через пропорциональные электромагниты 36 электронного блока управления 33 распределителем 30 по величине угла рассогласования поворотов переднего и заднего мостов ПМ, ЗМ, контролируемого соответственно датчиками 21 и 22, установленными на них.
В случае отказа электронной системы управления поворотом заднего моста ЗМ гидравлическая система управления поворотом переднего моста ПМ позволяет большегрузному транспортному средству двигаться в режиме ограниченной управляемости. Для обеспечения возможности отключения водителем, при необходимости, системы поворота заднего моста ЗМ (при этом он автоматически устанавливается в нейтральное положение) на панели приборов в кабине 5 (фиг. 1) имеется соответствующий выключатель.
Для управления процессом наладки системы рулевого управления, на основе разработанного алгоритма настройки взаимного положения мостов ПМ и ЗМ после сборки большегрузного транспортного средства и при эксплуатации, разработано и установлено в программируемый контроллер 34 (фиг. 5) соответствующее программное обеспечение (не показано).
Таким образом, такое применение опорно-поворотных кругов 9 (фиг. 2, 3, 4) в мостах ПМ и ЗМ большегрузного транспортного средства и описанная выше их конструкция по изобретению, с обеспечением его поворота с помощью использования описанной выше рулевой системы поворота, позволит:
- применить восемь шин одного типоразмера вместо традиционно применяемых шести шин, что направлено на увеличение грузоподъемности, например, карьерного самосвала до 450 тонн и выше;
- обеспечить возможность поворота двух мостов такого транспортного средства относительно его цельной рамы в различных режимах, что значительно улучшит его маневренность и уменьшит габариты в целом;
- улучшить устойчивость на поворотах и улучшить маневренность большегрузного транспортного средства, что повысит, вследствие этого, его грузоподъемность.
Изобретение внедрено в опытной конструкции карьерного самосвала БЕЛА3-75710, успешно прошедшего эксплуатационные испытания.
Источники информации
1. Мариев П.Л, Егоров А.Н. и др. Карьерные самосвалы особо большой грузоподъемности. Проектирование, технологии, маркетинг / П.Л. Мариев и др., Минск: Интегралполиграф, 2008, стр. 124-126, рис. 2.6.1.
2. Патент RU 2488508, МПК B62D 5/06, B62D 15/00, приоритет 24.04.2012, опубликован 27.07.2013.
3. Самосвал БЕЛА3-75710. Руководство по эксплуатации 75710-3902015 РЭ, г. Жодино, БЕЛАЗ, стр. 9-1-9-3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ БОЛЬШЕГРУЗНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2625695C1 |
| АВТОМОБИЛЬНОЕ ПОВОРОТНОЕ УСТРОЙСТВО И КАРЬЕРНЫЙ САМОСВАЛ НА ЕГО ОСНОВЕ | 2015 |
|
RU2602618C1 |
| КОМПОНОВОЧНАЯ СХЕМА ШАССИ ГРУЗОВОГО АВТОМОБИЛЯ | 2015 |
|
RU2596200C1 |
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ | 1989 |
|
SU1829271A1 |
| Транспортное средство | 1979 |
|
SU770867A1 |
| Транспортное средство | 1979 |
|
SU887306A2 |
| Гидравлический привод опрокидывающего механизма автомобиля-самосвала | 1989 |
|
SU1743941A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО СНИЖЕНИЯ КУРСОВОГО УВОДА ПРИЦЕПА ТРАКТОРНОГО ПОЕЗДА | 2004 |
|
RU2270102C2 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2049690C1 |
Изобретение относится к области транспортного машиностроения. Система рулевого управления для большегрузных транспортных средств содержит усилитель потока, соединенный с рулевым механизмом и со штоковыми полостями правого и левого цилиндров опорно-поворотного круга переднего моста, и два распределителя. Один распределитель соединен с рулевым механизмом и сообщен с бесштоковыми полостями правого и левого цилиндров опорно-поворотного круга переднего моста. Другой распределитель не соединен с рулевым механизмом, снабжен электромагнитным блоком управления и сообщен с штоковыми и с бесштоковыми полостями правого и левого цилиндров опорно-поворотного круга заднего моста. Управляющее устройство соединено с электромагнитным блоком управления и с датчиками. Электромагнитный блок управления снабжен пропорциональными электромагнитами. Датчики измеряют углы поворота опорно-поворотных кругов. Достигается расширение функциональных возможностей системы рулевого управления. 2 з.п. ф-лы, 7 ил. 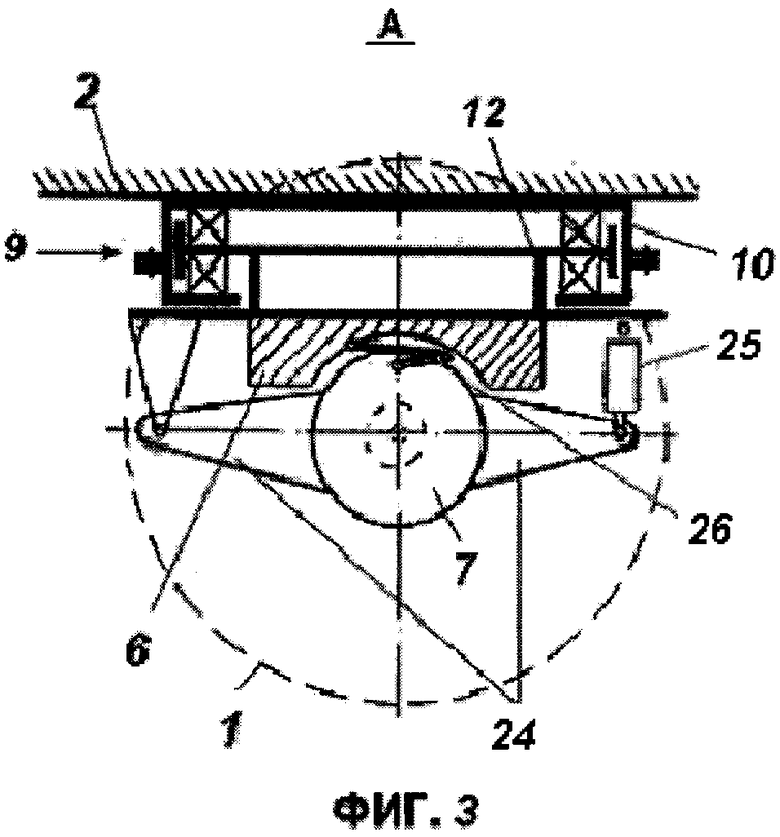
1. Система рулевого управления для большегрузных транспортных средств, содержащая усилитель потока с распределителем выбора направления потока рабочей жидкости под давлением, соединенный с рулевым механизмом и со штоковыми полостями правого и левого цилиндров управления поворотом опорно-поворотного круга переднего моста большегрузного транспортного средства, и два распределителя, один из которых соединен с рулевым механизмом и сообщен своими выходами с бесштоковыми полостями правого и левого цилиндров управления поворотом опорно-поворотного круга переднего моста большегрузного транспортного средства, а второй – не соединен с рулевым механизмом, снабжен электромагнитным блоком управления и сообщен своими выходами со штоковыми и бесштоковыми полостями правого и левого цилиндров управления поворотом опорно-поворотного круга заднего моста большегрузного транспортного средства, причем с электромагнитным блоком управления соединено управляющее устройство, которое соединено также с датчиками, отличающаяся тем, что электромагнитный блок управления снабжен пропорциональными электромагнитами, а датчики установлены с возможностью измерения текущих углов поворота опорно-поворотных кругов, при этом в качестве управляющего устройства применен программируемый контроллер, который связан с пропорциональными электромагнитами и с датчиками.
2. Система по п.1, отличающаяся тем, что один датчик установлен на остове и связан рычажным механизмом с опорно-поворотным кругом переднего моста большегрузного транспортного средства, а второй датчик установлен на остове и связан рычажным механизмом с опорно-поворотным кругом его заднего моста.
3. Система по п.1, отличающаяся тем, что применены датчики электромагнитного типа, связанные рычажными механизмами с опорно-поворотными кругами большегрузного транспортного средства.
| АВТОМОБИЛЬ ПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ С УПРАВЛЯЕМЫМ МОСТОМ В КАЧЕСТВЕ ГАСИТЕЛЯ КОЛЕБАНИЙ | 2011 |
|
RU2469898C2 |
| Система рулевого управления транспортного средства | 1983 |
|
SU1133157A1 |
| US 20100013190 A1, 21.01.2010 | |||
| US 2896734 A1, 28.07.1959. | |||

