Заявляемый объект относится к области пассивной гидролокации и может быть использован, например, при создании системы мониторинга обстановки в охраняемой морской экономический зоне.
Задачей обработки данных в пассивной системе мониторинга, является обнаружение шумящих объектов (целей). При этом реакция оператора указанной системы на обнаруженную цель может зависеть от ее класса. (Примеры классов морских целей: танкер, яхта, субмарина, катер, морское животное и т.д.). В связи с этим необходимой компонентой задачи обнаружения может являться принятие решения о классе цели по ее обнаруженной отметке.
Как правило, комплекс задач, решаемых в известных гидроакустических пассивных системах мониторинга, включает только обнаружение сигналов шумоизлучения (ШИ) морских целей (т.е. обнаружение отметок) и измерение их пеленгов с использованием одиночных шумопеленгаторных станций. Основу описанных в известных источниках способов обнаружения сигналов ШИ морских объектов (см., например, Колесникова И.К., Румынская И.А. Основы гидроакустики и гидроакустические станции. - Л.: Судостроение, 1970, - С. 250-255; Простаков А.Л. Электронный ключ к океану. - Л.: Судостроение, 1978. - С. 21-23; Гусев В.Г. Системы пространственно-временной обработки гидроакустической информации. - Л.: Судостроение, 1988. - С. 47-51; Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. - Л.: Судостроение, 1981. - С. 69-78, а также способы обнаружения сигналов ШИ морских объектов по патентам РФ №2145426, 2316791 и 2373553) составляет совокупность операций, обеспечивающих прием сигналов на фоне помех, измерение мощности предполагаемого (т.е. обнаруживаемого) сигнала в каждом направлении наблюдения и принятии решения об обнаружении отметок целей при превышении порога соответствующими результатами измерения мощности. Как отмечено выше, при обнаружении каждой отметки в известных аналогах реализуется измерение направления прихода соответствующего ей сигнала, т.е. ее пеленгование. Последняя операция описана, например, в цитированной выше книге Колесниковой И.К. и Румынской И.А. (см. с. 227…236).
Одним из недостатков указанных способов является отсутствие принятия решения о классе цели по ее обнаруженной отметке.
Наиболее близким по технической сущности к заявляемому объекту является способ обнаружения шумящих объектов, входящий в состав объекта по патенту РФ No 2526896 на «Способ определения местоположения объектов в пассивной системе мониторинга» (прототип). Ниже приводится сравнительно подробное описание прототипа в связи с тем, что все его признаки входят и в состав заявляемого объекта. Блок-схема прототипа представлена на фиг. 1, где обозначены:
1 - прием сигналов (не менее чем) двумя приемными позициями;
2 - пространственная селекция;
3 - некогерентное накопление сигналов по времени;
4 - принятие решений об обнаружении отметок целей;
5 - формирование пеленгационных линий положения;
6 - определение расстояний между каждой из двух приемных позиций системы и точками пересечения пеленгационных линий положения;
7 - измерение уровней принимаемых сигналов, соответствующих обнаруженным отметкам;
8 - пересчет измеренных уровней к точкам пересечения пеленгационных линий положения;
9 - формирование функций разности результатов пересчета уровней сигналов;
10 - определение координат целей.
Далее приводится описание прототипа (а также и заявляемого объекта) при приеме двумя приемными позициями.
Операция 1 (прием сигналов двумя приемными позициями) предусматривает преобразование акустических сигналов в каждой приемной позиции в электрические. В каждой из приемных позиций она реализуется, например, так же, как в объекте по патенту РФ №2316791, а именно гидроакустической антенной решеткой, содержащей, в частности, совокупность гидрофонов. См. также, например, А.П. Евтютов, В.Б. Митько. Примеры инженерных расчетов в гидроакустике. Л., Судостроение, 1981, с. 116, рис. 1.8).
Операция 2 (пространственная селекция) реализуется посредством формирования в каждой приемной позиции веера приемных характеристик направленности (пространственных каналов обработки). Операция пространственной селекции показана на рис. 1.8. с. 15 (позиции 1 и 2) в «Справочнике по гидроакустике» А.В. Евтютова и др. Л. Судостроение. 1982. В этом источнике она включает и операцию приема сигналов антенной (позиция 1 на указанном рис. 1.8). Однако в настоящем описании операция приема сигналов выделена как отдельная, чем обеспечивается возможность указания на то, что она выполняется в нескольких приемных позициях. Блок-схема устройства формирования веера приемных характеристик направленности приведена в цитированном «Справочнике…» на рис. 1.10, с. 16. В итоге выполнения операции 2 в каждой приемной позиции сформированы, например, временные реализации сигналов, соответствующих каждому пространственному каналу обработки. Совокупность выходов устройства, реализующего данную операцию (она показана на рис. 1.10 цитированного «Справочника…») подключена к входам показанных на этом рисунке блоков фильтров 4; строго говоря, сигналы с отводов линий задержки (позиция 3 на рис. 1.10) передаются на входы фильтров 4 не непосредственно, а через сумматоры (на рис. 1.10. сумматоры не показаны; они заменены на этом рисунке сплошными и пунктирными прямыми линями, пересекающими совокупность регистров сдвига). На выходе каждого из упомянутых сумматоров формируется сигнал, соответствующий одному из пространственных каналов обработки.
Операция 3 (некогерентное накопление сигналов по времени) показана в цитированном «Справочнике…» на рис. 1.8 (позиции 3, 4 и 5) как совокупность операций полосовой фильтрации, детектирования и осреднения по времени, реализуемых в каждом пространственном канале обработки в каждой приемной позиции.
Операция 4 (принятие решений об обнаружении отметок целей) в каждой приемной позиции реализуется, например, аналогично объектам, описанным в цитированной выше книге Колесниковой И.К., Румынской И.А. Основы гидроакустики и гидроакустические станции. - Л.: Судостроение, 1970, - С. 250-255, упомянутым выше объектам по патентам РФ №2145426,2316791 и 2373553, а также книге Тюрина А.М.и др. Основы гидроакустики. - Л.: Судостроение, 1966, - С. 191-209, и предусматривает принятие решения об обнаружении отметок цели (или целей) при превышении порога соответствующими результатами выполнения операции некогерентного накопления сигналов по времени.
Операция 5 (формирование пеленгационных линий положения, т.е. определение углов между, например, осью начала отсчета пеленгов, ориентированной в направлении на Север, и направлением на отметку) реализуется согласно цитированной выше книге И.К. Колесниковой и И.А. Румынской (см. с. 227…236), или книге Э.Ф. Свиридова «Сравнительная эффективность моноимпульсных радиолокационных систем пеленгации». Л. Судостроение, 1964. Например, в варианте фазового пеленгования эта операция реализуется посредством измерения разности фаз сигналов, сформированных по двум половинам приемной антенны; возможен и вариант реализации операции пеленгования, приведенный в описании объекта по патенту РФ №2316791 (в описании данного изобретения это операция 3). В результате выполнения данной операции формируются пеленгационные линии положения, каждая из которых характеризуется параметром ϕji. Здесь i=1, 2 - номер приемной позиции, ji - номер отметки, по которой сформирована пеленгационная линия положения в i-й приемной позиции. Указанный угол ϕji, как отмечено выше, есть угол между упомянутой осью начала отсчета пеленгов и направлением из i-й приемной позиции на j-ю отметку; каждый из указанных углов отсчитывается от упомянутой оси по часовой стрелке.
Операция 5 может выполняться над данными в тех пространственных каналах обработки (характеристиках направленности), в которых обнаружены отметки, и с учетом углов ориентации соответствующих этим каналам характеристик направленности. Этому соответствует показанная на фиг. 1 связь между операциями 4 и 5.
Данная операция 5 в вариантах классического, например, амплитудного моноимпульсного пеленгования выполняется над результатами выполнения операции 2 (этот вариант связи между операциями 2 и 5 на фиг. 1, а также и фиг. 2 не показан), а в случае ее выполнения на основе соотношения уровней результатов некогерентного накопления сигналов по времени (как это описано, например, в книге «Применение цифровой обработки сигналов» под ред. Э. Оппенгейма. М. Мир. 1980, с. 325 или в описании объекта по патенту РФ №2316791 на «Способ обнаружения сигналов шумоизлучения морских объектов) - над результатами выполнения операции 3; в последнем случае указанные уровни результатов некогерентного накопления сигналов по времени, вырабатываемые при выполнении операции 3, либо передаются на вход операции 5 по показанной на фиг. 1 (а также фиг. 2) связи, либо транслируются операцией 4 на вход операции 5. Указанные варианты реализации операции формирование пеленгационных линий положения (над результатами выполнения операции либо 2, либо 3) между собой эквивалентны.
Операция 6 (определение расстояний между каждой из двух приемных позиций системы и точками пересечения пеленгационных линий положения) реализуется с использованием соответствующих расчетных соотношений, приведенных в описании объекта по патенту РФ No 2526896 (являющемуся прототипом). В результате выполнения операции 6 (по совокупности всех обнаруженных отметок) определяются расстояния между i-й приемной позицией и целью, сигнал шумоизлучения которой является j-й отметкой, по которой сформирована пеленгационная линия положения в i-й приемной позиции; указанные расстояния обозначим как Rji.
Между номером  каждой точки пересечения пеленгационных линий положения и парой сочетаний индексов j1 и j2 этих пеленгационных линий положения (характеризующихся упомянутыми при описании операции 5 углами ϕj1 и ϕj2) существует взаимно однозначное соответствие вида
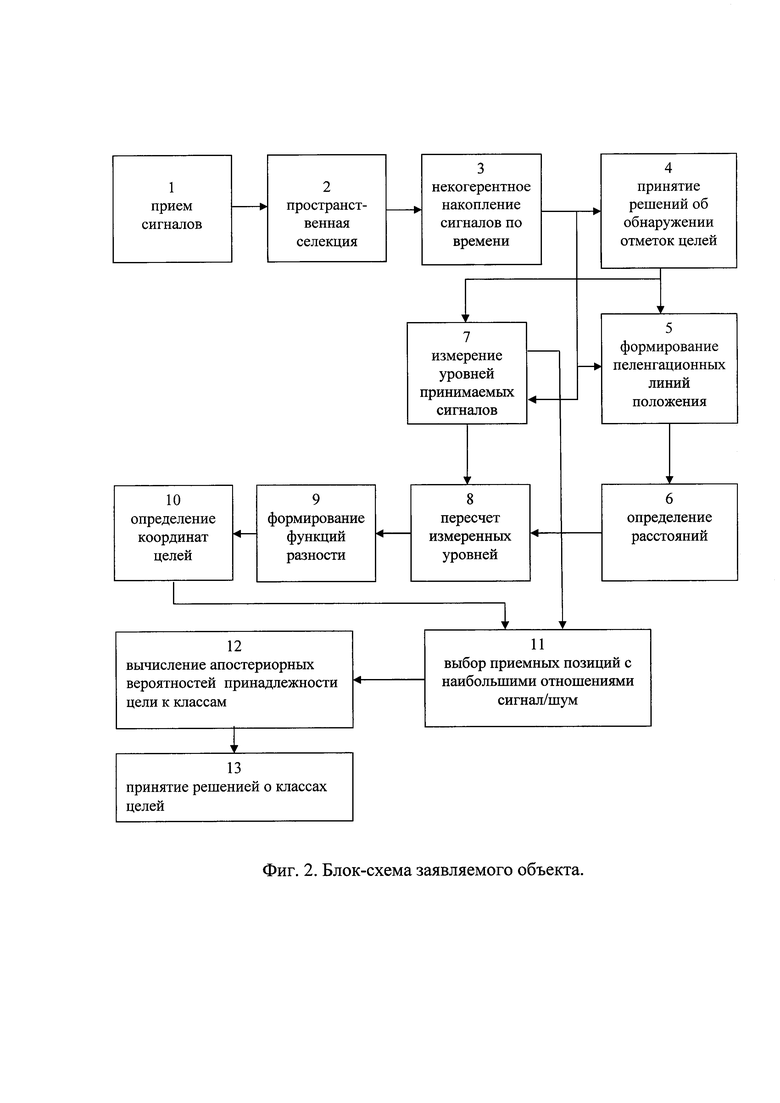
каждой точки пересечения пеленгационных линий положения и парой сочетаний индексов j1 и j2 этих пеленгационных линий положения (характеризующихся упомянутыми при описании операции 5 углами ϕj1 и ϕj2) существует взаимно однозначное соответствие вида  В связи с тем, что нумерация указанных точек пересечения пеленгационных линий положения произвольна, конкретизации указанного взаимно однозначного соответствия применительно к общему случаю является излишней. Пример такого соответствия иллюстрируется фиг. 3, где показаны (обозначены), в частности, номера всех точек пересечения пеленгационных линий положения в ситуации обнаружения двумя приемными позициями трех целей.
В связи с тем, что нумерация указанных точек пересечения пеленгационных линий положения произвольна, конкретизации указанного взаимно однозначного соответствия применительно к общему случаю является излишней. Пример такого соответствия иллюстрируется фиг. 3, где показаны (обозначены), в частности, номера всех точек пересечения пеленгационных линий положения в ситуации обнаружения двумя приемными позициями трех целей.
Операция 7 (измерение уровней принимаемых сигналов, соответствующих обнаруженным отметкам) реализуется следующим образом. Результаты выполнения операции 3 (они формируются на выходах, не показанных на рис. 1.10 цитированного выше «Справочника…» сумматоров) в тех пространственных каналах, в которых в результате выполнения операции 4 обнаружены отметки целей, обозначаются как Sji. По каждому из них вычисляется искомый измеренный уровень принятого сигнала Sji вх=Sji/Кт, где Кт - коэффициент передачи тракта обработки (в него входит совокупность устройств, реализующих совокупность операций 1…3). Данный коэффициент предварительно определяется по результатам калибровки указанного тракта обработки, либо расчетным путем. Для простоты изложения считаем, что этот коэффициент во всех пространственных каналах совпадает.
Операция 8 (пересчет измеренных уровней к точкам пересечения пеленгационных линий положения) предусматривает пересчет уровней принимаемых сигналов (последние измерены в процессе выполнения операции 7) к точкам их возможного излучения Sji изл, точнее, к одному метру от этих точек. Пересчет осуществляется по формуле Sji изл=Sji вх/H(Rji), где H(Rji) - потери распространения на расстоянии Rji. В процессе выполнения данной операции в приведенную выше формулу для расчета каждого значения Sji изл в качестве параметра Rji используется расстояние от i-й приемной позиции до обнаруженной в ней j-й отметке.
Для выполнения рассматриваемой операции 8 необходимо задать закон ослабления звука (или потери распространения). Известно (см., например, Гийес Л., Сабате П. Основы акустики моря. - Л.: Гидрометиздат, 1967. - С. 94-95), что потери при так называемом стандартном распространении определяются как:

(здесь rп=1 м - так называемое единичное расстояние, a0 - пространственное затухание звука; наиболее распространено соотношение для расчета величина пространственного затухания звука вида  (дБ/км), где применительно к случаю приема широкополосного сигнала
(дБ/км), где применительно к случаю приема широкополосного сигнала  - среднегеометрическая частота рабочего диапазона; все входящие в формулу расстояния - в метрах.
- среднегеометрическая частота рабочего диапазона; все входящие в формулу расстояния - в метрах.
Формула для расчета потерь распространения в общем случае приведена в книге Урика Р.Дж. Основы гидроакустики. - Л.: Судостроение, 1978. - С. 170). Она имеет вид:

где r0 - переходное расстояние (м). Там же (с. 170) приведено описание методики приближенного расчета переходного расстояния r0. Существует множество программ, позволяющих рассчитать потери распространения или величину переходного расстояния r0 применительно к конкретным гидролого-акустическим условиям. В частном случае сферического закона ослабления уровня сигнала с расстоянием имеем r0=Rji и тогда (2) совпадает с (1). Для простоты можно ограничиться рассмотрением ситуации сферического закона.
Операция 9 (формирование функций разности результатов пересчета уровней сигналов) предусматривает расчет функций разности  (где
(где  номер точки пересечения пеленгационных линий положения; нумерация указанных точек произвольная), например, (в варианте двух приемных позиций) вида
номер точки пересечения пеленгационных линий положения; нумерация указанных точек произвольная), например, (в варианте двух приемных позиций) вида

где пары индексов при уровнях Sj1 изл и Sj2 изл при расчете функции разности результатов пересчетов уровней для  точки пересечения пеленгационных линий положения
точки пересечения пеленгационных линий положения  связаны упомянутой выше зависимостью
связаны упомянутой выше зависимостью  σп - прогнозируемая стандартная ошибка пересчета результатов измерения уровней сигналов в приемных позициях к точкам пересечения пеленгационных линий положения; на сегодня в качестве экспертной оценки данной величины может быть принята величина σп=3 дБ. Следует заметить, что качество решения задачи, от неточности задания величины о п зависит несущественно.
σп - прогнозируемая стандартная ошибка пересчета результатов измерения уровней сигналов в приемных позициях к точкам пересечения пеленгационных линий положения; на сегодня в качестве экспертной оценки данной величины может быть принята величина σп=3 дБ. Следует заметить, что качество решения задачи, от неточности задания величины о п зависит несущественно.
Операция 10 (определение координат целей) содержит следующие две фазы: в первой фазе реализуется идентификация целей путем сравнения всех вычисленных величин  с порогом, равным, например, П=0.1, а превысивших этот порог - еще и между собой (одна из этих двух операций может быть опущена). В случае реализации идентификации путем сравнения всех вычисленных величин
с порогом, равным, например, П=0.1, а превысивших этот порог - еще и между собой (одна из этих двух операций может быть опущена). В случае реализации идентификации путем сравнения всех вычисленных величин  с порогом решение о наличии цели в
с порогом решение о наличии цели в  точке пересечения линий положения принимается при выполнении условия
точке пересечения линий положения принимается при выполнении условия  при этом цели, по которым выработаны пеленгационные линии положения, пересекающиеся в этой
при этом цели, по которым выработаны пеленгационные линии положения, пересекающиеся в этой  точке (для которой выполняется условие
точке (для которой выполняется условие  ) считаются проидентифицированными или идентичными. В итоге выявляются точки фактического расположения обнаруженных шумящих объектов (целей).
) считаются проидентифицированными или идентичными. В итоге выявляются точки фактического расположения обнаруженных шумящих объектов (целей).
Далее во второй фазе определяются координаты этих точек, являющихся фактически координатами обнаруженных целей. Пояснения по выполнению операции 10 в части определения координат приведено в описании объекта по патенту РФ No 2526896.
В итоге реализации прототипа вырабатываются результаты определения координат обнаруженных целей.
Недостатком прототипа, как и всех упомянутых выше аналогов, является отсутствие принятия решения о классе цели по ее обнаруженной отметке.
Целью заявляемого технического решения является устранение указанного недостатка прототипа, а именно обеспечение наряду с определением координат обнаруженных целей также и принятия решения о классе каждой из них.
Цель достигается тем, что в способе обнаружения шумящих объектов гидроакустической пассивной системой мониторинга, заключающемся в приеме сигналов аппаратурой разнесенных приемных позиций, пространственной селекции по принятым сигналам в каждой из приемных позиций, некогерентном накоплении по времени каждого из результатов пространственной селекции, принятии решений об обнаружении отметок от целей по результатам накопление по времени, формировании по результатам обнаружения каждой отметки пеленгационных линий положения в не менее чем двух позициях, определении координат точек пересечения пеленгационных линий положения, определении расстояний между каждой из не менее чем двух приемных позиций системы и точками пересечения линий положения, сформированных в этих позициях, измерении уровней принимаемых этими позициями сигналов, по которым обнаружены отметки, пересчете каждого из этих уровней к точкам пересечения пеленгационных линий положения, соответствующим указанным отметкам, формировании функций разности результатов пересчета уровней сигналов от каждой из указанных приемных позиций к одной и той же точке пересечения этих линий положения для ряда этих точек, определении координат целей как координат только тех точек пересечения пеленгационных линий положения, для которых функции разности результатов пересчета уровней сигналов превышают порог, дополнительно по каждой конкретной цели, координаты которой определены, выбирается та из приемных позиций, в которой отношение уровня сигнала от этой цели к уровню шума превышает отношение уровня сигнала от этой же цели к уровню шума во всех прочих приемных позициях, и по уровню сигнала от указанной цели в выбранной приемной позиции, пересчитанного к точке ее расположения, вычисляется массив апостериорных вероятностей принадлежности этой цели к каждому из заданных классов, по результатам сравнения вычисленных апостериорных вероятностей принадлежности каждой цели к каждому из заданных классов определяется класс каждой обнаруженной цели.
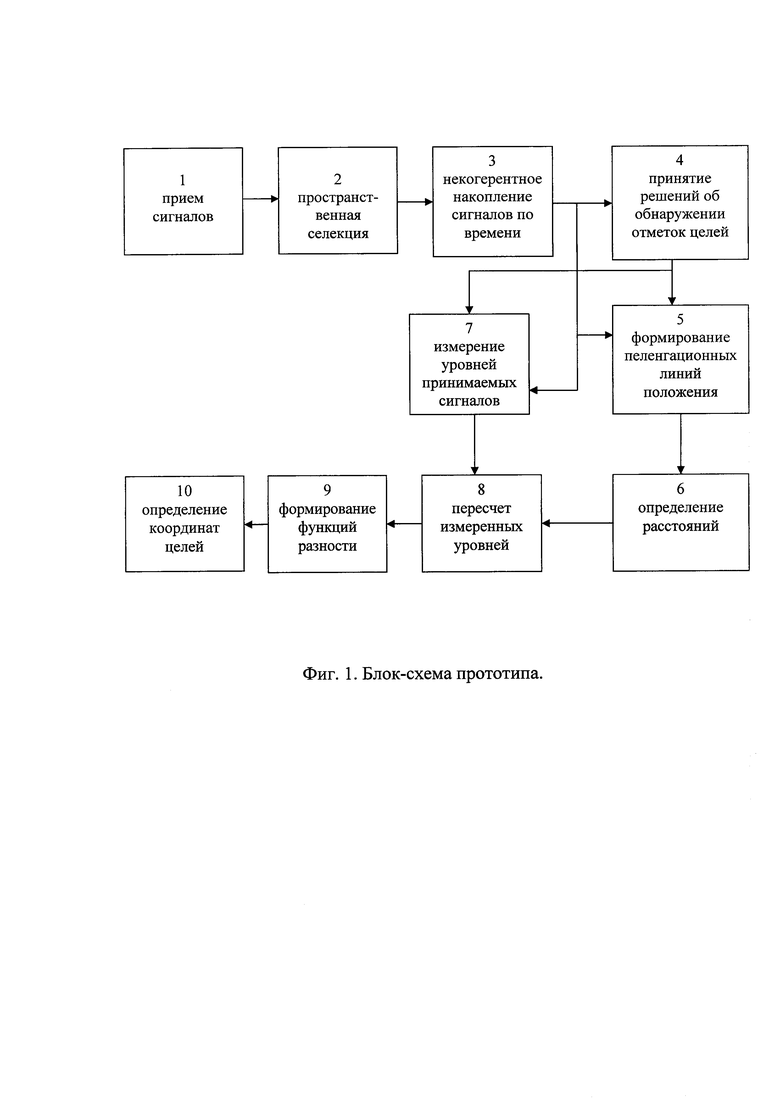
Блок-схема заявляемого объекта представлена на фиг. 2. Операции 1…10 блок-схемы на фиг. 2 по своим названиям, выполняемым функциям и взаимодействию между собой полностью совпадают с операциями прототипа, фигурирующими под соответствующими номерами на блок-схеме фиг. 1. Новые в сравнении с прототипом операции на фиг. 2 обозначены:
- 11 выбор приемных позиций с наибольшими отношениями сигнал/шум по каждой цели, координаты которой определены;
- 12 вычисление массива апостериорных вероятностей принадлежности каждой цели к каждому из классов;
- 13 определение класса каждой цели по результатам сравнения вычисленных апостериорных вероятностей принадлежности этой цели к каждому из заданных классов.
Операция 11 (выбор приемных позиций с наибольшими отношениями сигнал/шум по каждой цели, координаты которой определены), например, при одинаковых уровнях помех во всех приемных позициях и во всех направлениях в каждой из этих позиций предусматривает сравнение результатов измерения тех уровней принимаемых сигналов (эти результаты вырабатываются в итоге выполнения операции 7), которые относятся к идентичным целям. Как указано выше при описании операции 10, координатами целей являются координаты тех  точек пересечения пеленгационных линий положения, для которых выполнено условие
точек пересечения пеленгационных линий положения, для которых выполнено условие  В связи с этим цели, по которым определены координаты, являются идентичными. Каждой
В связи с этим цели, по которым определены координаты, являются идентичными. Каждой  точке пересечения пеленгационных линий положения соответствует пара измеренных при выполнении операции 7 уровней Sji вх (индексы j и i это пары уровней для
точке пересечения пеленгационных линий положения соответствует пара измеренных при выполнении операции 7 уровней Sji вх (индексы j и i это пары уровней для  точки определяются зависимостью
точки определяются зависимостью  Из этой пары уровней выбирается максимальный по индексу i номера приемной позиции
Из этой пары уровней выбирается максимальный по индексу i номера приемной позиции 
Указание на то, что операция 11 выполняется по каждой цели, координаты которой определены, отражено в блок-схеме заявляемого объекта на фиг. 2 в виде связи между операциями 10 и 11. При этом, как отмечено в предыдущем абзаце, из всех поступающих на вход операции 11 результатов измерения уровней принимаемых сигналов (операция 7) для выполнения операции 11 используются только те, которые имеют отношение к обнаруженным целям. Вместо этой связи между операциями 10 и 11 возможен вариант реализации способа со связью между операциями 10 и 7; при этом на вход операции 11 подаются только те результаты измерения уровней принимаемых сигналов (операция 7), которые соответствуют целям, координаты которых определены.
Результатами выполнения операции 11 является массив из L (L - количество обнаруженных источников шумоизлучения) значений  при
при 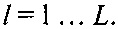
Операция 12 (вычисление апостериорных вероятностей принадлежности каждой цели к каждому из классов) выполняется следующим образом. Пусть априорная вероятность обнаружения цели k-го класса (т.е. вероятность нахождения цели k-го класса в зоне действия системы мониторинга) равна Pk, а плотность распределения вероятностей уровня шумоизлучения (задаваемого, как правило, в одном метре от источника этого шумоизлучения) цели k-го класса имеет вид логнормального распределения, т.е. плотность распределения вероятностей логарифма уровня шумоизлучения является нормальной и имеет вид

где K - общее количество возможных классов; U=lgS, где при вычислении апостериорных вероятностей принадлежности к разным классам цели, расположенной в  точке, в (3) осуществляется подставка
точке, в (3) осуществляется подставка  величины σk и
величины σk и  соответственно стандарт (стандартное отклонение) и математическое ожидание случайной величины Uk, определяемой как Uk=lgSизл k, где Sизл k - уровень сигнала шумоизлучения цели k-го класса. Параметры σk и
соответственно стандарт (стандартное отклонение) и математическое ожидание случайной величины Uk, определяемой как Uk=lgSизл k, где Sизл k - уровень сигнала шумоизлучения цели k-го класса. Параметры σk и  определяются, например, путем их оценивания по целям разных (известных в точках приема) классов, маневрирующих в зоне обзора системы мониторинга (т.е. путем так называемого «обучения с учителем» или «самообучения с учителем»).
определяются, например, путем их оценивания по целям разных (известных в точках приема) классов, маневрирующих в зоне обзора системы мониторинга (т.е. путем так называемого «обучения с учителем» или «самообучения с учителем»).
При этом апостериорная вероятность  принадлежности обнаруженной цели, расположенной в
принадлежности обнаруженной цели, расположенной в  точке, к k-му классу определяется соотношением
точке, к k-му классу определяется соотношением

В итоге выполнения операции 12 формируется L массивов, содержащих по K результатов вычисления апостериорных вероятностей 
Операция 13 (определение класса каждой цели по результатам сравнения вычисленных апостериорных вероятностей принадлежности этой цели к каждому из заданных классов) выполняется путем сравнения рассчитанных в результате выполнения операции 12 величин апостериорных вероятностей  При этом для каждого в отдельности массива апостериорных вероятностей
При этом для каждого в отдельности массива апостериорных вероятностей  при фиксированном значении индекса
при фиксированном значении индекса  определяется индекс
определяется индекс  при той из апостериорных вероятностей
при той из апостериорных вероятностей  которая является максимальной среди всех значений
которая является максимальной среди всех значений  при указанном фиксированном индексе
при указанном фиксированном индексе  Класс каждой
Класс каждой  цели (т.е. цели, расположенной в
цели (т.е. цели, расположенной в  точке пересечения пеленгационных линий положения) определяется как
точке пересечения пеленгационных линий положения) определяется как 
Принцип действия заявляемого объекта состоит в следующем. Основным классификационным признаком (т.е. параметром сигнала) ШИ, по которому может приниматься решение о классе цели, является ее приведенная шумность, т.е. уровень сигнала ШИ на расстоянии в 1 метр от источника его излучения (примечание: тот факт, что этот уровень классически определяется в полосе шириной 1 Гц в окрестности частоты 1 кГц, в рамках настоящей заявки является несущественным). В приемном тракте шумопеленгаторной станции (приемной позиции) возможно измерение уровня принятого сигнала ШИ. Для оценивания же приведенной шумности цели по ее обнаруженной отметке (с учетом результата измерения уровня принятого сигнала ШИ) необходимо знать коэффициент ослабления сигнала ШИ при его распространении от цели до приемной позиции (фактически до приемной антенны шумопеленгаторной станции), который однозначно определяется расстоянием между целью и приемной позицией, которое в заявляемом объекте определяется так же, как и в прототипе.
Итак, при реализации заявляемого способа в итоге выполнения операции 10 формируются результаты определения координат (обнаруженных) целей, а в итоге выполнения операции 13 - классы этих целей, чем и обеспечивается достижение технического эффекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения объектов гидроакустической пассивной системой в условиях многомодового распространения звука | 2017 |
|
RU2667330C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ В ПАССИВНОЙ СИСТЕМЕ МОНИТОРИНГА | 2013 |
|
RU2526896C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681432C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681526C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
Заявляемый объект относится к области пассивной локации (гидролокации) и используется при создании системы мониторинга обстановки в морской зоне. Техническим результатом является определение координат обнаруженных целей и принятие решения о классе каждой из них. Способ предусматривает прием сигналов разнесенных приемных позиций, пространственную селекцию по принятым сигналам в каждой из позиций, некогерентное накопление каждого из результатов пространственной селекции, принятие решений об обнаружении отметок от целей по результатам накопления по времени, формирование по результатам обнаружения каждой отметки пеленгационных линий положения, определение координат точек пересечения пеленгационных линий положения, определение расстояний между приемными позициями системы, измерение уровней принимаемых этими позициями сигналов, по которым обнаружены отметки, пересчет каждого из этих уровней, формирование функций разности результатов пересчета уровней сигналов, определение координат целей, выбор по каждой конкретной цели, координаты которой определены, вычисление по уровню сигнала от указанной цели в выбранной приемной позиции, пересчитанного к точке ее расположения, вычисление апостериорных вероятностей принадлежности этой цели к каждому из заданных классов и определение класса каждой обнаруженной цели. 3 ил.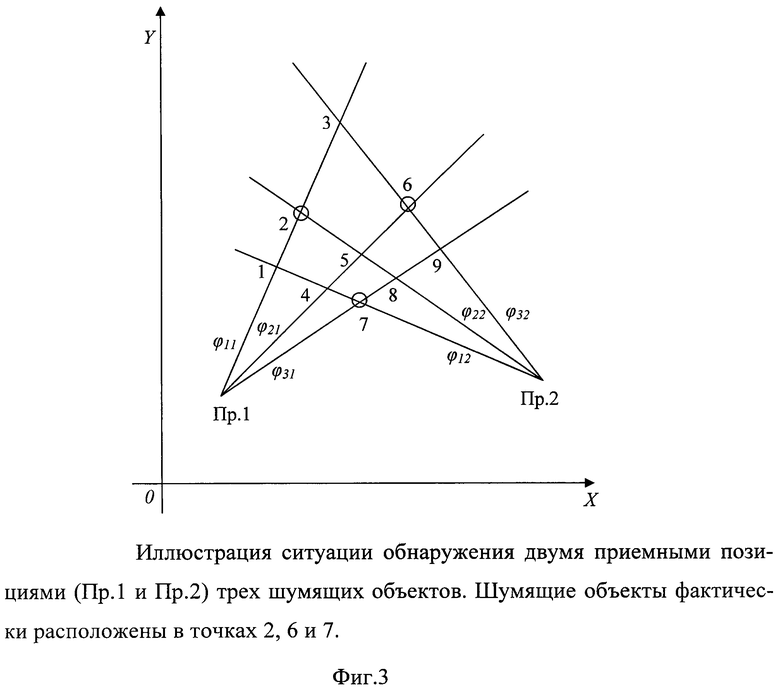
Способ обнаружения шумящих объектов гидроакустической пассивной системой мониторинга, заключающийся в приеме сигналов аппаратурой разнесенных приемных позиций, пространственной селекции по принятым сигналам в каждой из приемных позиций, некогерентном накоплении по времени каждого из результатов пространственной селекции, принятии решений об обнаружении отметок от целей по результатам накопления по времени, формировании по результатам обнаружения каждой отметки пеленгационных линий положения в не менее чем двух позициях и определении координат точек пересечения пеленгационных линий положения, определении расстояний между каждой из не менее чем двух приемных позиций системы и точками пересечения линий положения, сформированных в этих позициях, измерении уровней принимаемых этими позициями сигналов, по которым обнаружены отметки и пересчете каждого из этих уровней к точкам пересечения пеленгационных линий положения, соответствующим указанным отметкам, формировании функций разности результатов пересчета уровней сигналов от каждой из указанных приемных позиций к одной и той же точке пересечения этих линий положения для ряда этих точек, определении координат целей как координат только тех точек пересечения пеленгационных линий положения, для которых функции разности результатов пересчета уровней сигналов превышают порог, отличающийся тем, что по каждой конкретной цели, координаты которой определены, выбирается та из приемных позиций, в которой отношение уровня сигнала от этой цели к уровню шума превышает отношение уровня сигнала от этой же цели к уровню шума во всех прочих приемных позициях, и по уровню сигнала от указанной цели в выбранной приемной позиции, пересчитанного к точке ее расположения, вычисляется апостериорная вероятность принадлежности цели к одному из заданных классов, по результатам сравнения вычисленных апостериорных вероятностей принадлежности каждой цели к каждому из заданных классов определяется класс каждой обнаруженной цели.
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| Электролит для выделения электролизом интерметаллидной фазы из титано-никелевых сплавов | 1955 |
|
SU106756A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЦЕЛЕЙ ПО ГИДРОЛОКАЦИОННЫМ СИГНАЛАМ | 2008 |
|
RU2368919C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| CN 104536007 A, 22.04.2015. | |||

