Изобретение относится к области приборостроения и может быть использовано при создании инерциальных навигационных систем.
Известна инерциальная навигационная система, содержащая бортовой вычислитель с данными о начальных параметрах поступательного и вращательного движения и алгоритмом обработки поступающей информации, датчики поступательного и углового движения [1].
Недостатками данной системы являются низкая надежность, высокая стоимость.
Наиболее близкой по технической сущности является инерциальная навигационная система [2], содержащая бортовой вычислитель, одностепенную платформу, механически соединенную с двигателем через редуктор, датчики поступательного и углового движения, установленные на платформе так, что их ось чувствительности образует с осью вращения платформы угол  и коммутатор, соединяющий датчики с бортовым вычислителем.
и коммутатор, соединяющий датчики с бортовым вычислителем.
Особенностью описанной системы является постоянное вращение одностепенной платформы вокруг своей оси, что позволяет использовать вместо трех датчиков вращательного движения и трех датчиков поступательного движения один датчик вращательного движения и один датчик поступательного движения, оси чувствительности которых посредством вращения платформы будут поочередно проходить через оси ортогональной системы координат, связанной с телом, соответствующие осям чувствительности датчиков системы [1], что обеспечивает повышение надежности системы, уменьшение массы и габаритов, снижение стоимости.
Недостатком описанной инерциальной навигационной системы является то, что информация через коммутатор снимается с датчиков только в момент, когда ось чувствительности датчиков вследствие вращения проходит в окрестности соответствующей оси системы координат, связанной с телом, что приводит к потере информации в то время, когда ось чувствительности датчиков находится вне окрестности оси координат, кроме того, фиксированный угол между осью чувствительности датчика и осью вращения платформы не позволяют адаптировать движение измерительной оси датчика по отношению к вектору измеряемой величины.
В основу изобретения положена техническая задача, заключающаяся в повышении динамической точности восстановления векторов углового и поступательного движения объекта.
Указанная техническая задача решается тем, что инерциальная навигационная система, установленная на объекте и содержащая подвижную платформу, механически соединенную с двигателем, установленным на объекте, датчики поступательного и углового движения, один из которых, например поступательного движения, установлен на платформе и соединен через передающий блок с бортовым вычислителем, согласно изобретению снабжена второй подвижной платформой, на которой установлен другой датчик, например углового движения, и обе платформы выполнены двухстепенными, а каждый датчик установлен на платформе так, что его измерительная ось перпендикулярна внутренней оси платформы, причем датчики поступательного и углового движения соединены с бортовым вычислителем через передающие блоки, выполненные в виде скользящих контактов и расположенные по внешним и внутренним осям платформ, при этом внутренняя ось каждой платформы механически соединена с собственным управляемым двигателем, установленным на внешней оси соответствующей платформы и связанным с бортовым вычислителем через передающий блок, выполненный в виде скользящих контактов, расположенный по внутренней оси этой платформы, а внешняя ось каждой платформы механически соединена с соответствующим управляемым двигателем, установленным на объекте и связанными с бортовым вычислителем.
Две двухстепенные платформы, на которых установлены датчики, благодаря управляемым двигателям позволяют выполнять независимое программное движение чувствительных осей датчиков и адаптировать их положение и движение по отношению к восстановленным векторам углового и поступательного движения объекта, что ведет к повышению динамической точности восстановления векторов углового и поступательного движения объекта. Кроме того, в отличие от коммутатора, осуществляющего дискретную передачу информации, скользящие контакты передают информацию с датчиков непрерывно, что ведет к повышению динамической точности восстановления векторов углового и поступательного движения объекта вследствие более высокой частоты обновления информации.
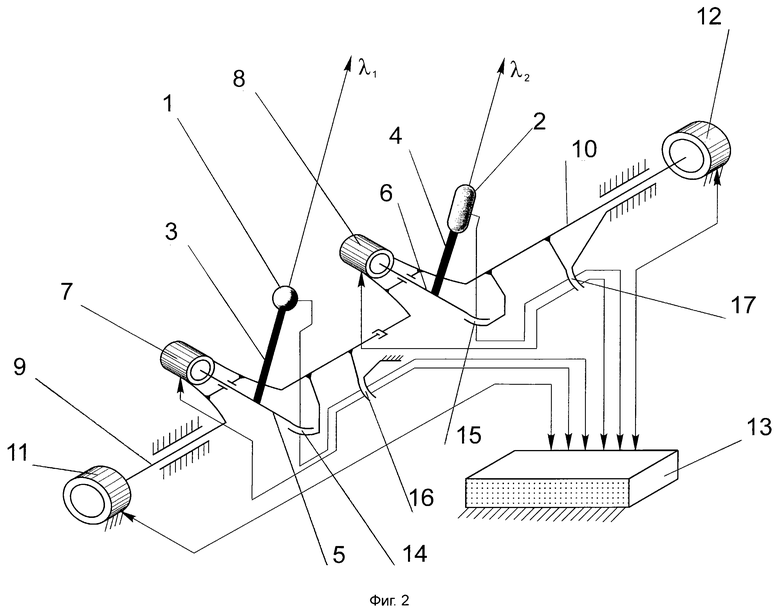
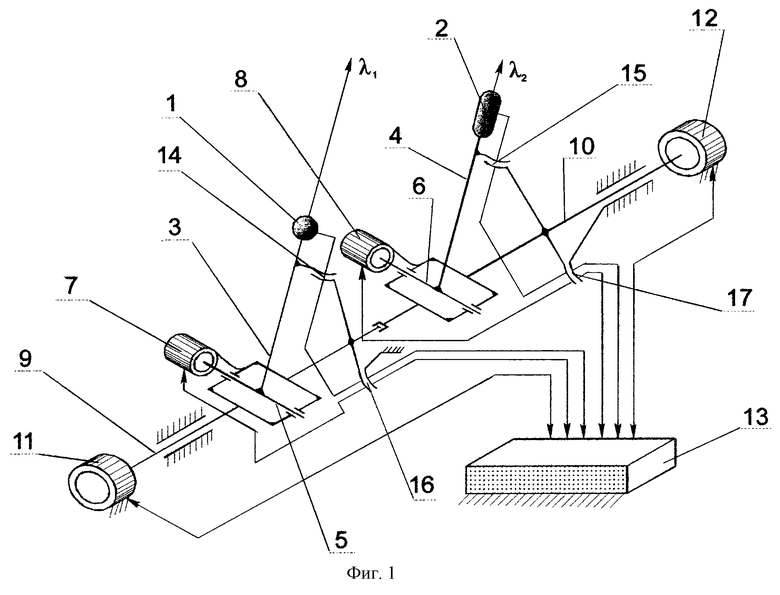
Сущность изобретения поясняется чертежами. На фиг.1 и 2 представлена схема инерциальной навигационной системы. Система содержит датчики поступательного 1 и углового 2 движения, установленные на двухстепенных платформах 3 и 4. Внутренние оси 5 и 6 двухстепенных платформ 3 и 4 механически соединены с соответствующими управляемыми двигателями 7 и 8, установленными на внешних осях 9 и 10 двухстепенных платформ 3 и 4. А внешние оси 9 и 10 двухстепенных платформ 3 и 4 механически соединены с соответствующими управляемыми двигателями 11 и 12, установленными на объекте, условно показанном штриховкой. Датчики поступательного 1 и углового 2 движения соединены с бортовым вычислителем 13 через скользящие контакты, расположенные по внутренним - 14 и 15, и внешним - 16 и 17 осям двухстепенных платформ 3 и 4. Управляемые двигатели 7 и 8, установленные на внешних осях двухстепенных платформ 3 и 4, соединены с бортовым вычислителем 13 через скользящие контакты 16 и 17, расположенные по внешним осям двухстепенных платформ 3 и 4. А управляемые двигатели 11 и 12, установленные на объекте, условно показанном штриховкой, непосредственно соединены с бортовым вычислителем 13.
Инерциальная навигационная система работает следующим образом: сигналы с датчиков 1 и 2, установленных на двухстепенных платформах 3 и 4, через скользящие контакты 14, 15, 16 и 17 непрерывно поступают в бортовой вычислитель 13, который восстанавливает по ним векторы поступательного и углового движения объекта. Кроме того, используя восстановленные векторы поступательного и углового движения, бортовой вычислитель формирует сигналы для управляемых двигателей 7, 8, 11 и 12. В результате все управляемые двигатели 7, 8, 11 и 12 совершают такое программное вращение платформ, что оси чувствительности датчиков поступательного λ1 и углового λ2 движения совершают оптимальное движение относительно восстановленных векторов поступательного и углового движения.
Данная инерциальная навигационная система может быть применена в качестве чувствительной части в приборах, измеряющих медленно меняющиеся навигационные параметры, например корабельные, геодезические и артиллерийские гировертикаль и гирокомпас, инклинометр. В частности, данная инерциальная навигационная система может имитировать работу чувствительной части бесплатформенной инерциальной навигационной системы, выдавая трехкомпонентный сигнал по ускорению и угловой скорости объекта в проекциях на оси объектной системы координат.
Источники информации
1. Гироскопические системы. Гироскопические приборы и системы: Учеб. для вузов по спец. “Гироскоп, приборы и устройства”/ Д.С.Пельпор, И.А.Михалев, В.А.Бауман.; Под ред. Д.С.Пельпора, с.314, М.: Высш. школа, 1977.
2. Патент РФ №778455 от 13 августа 1993 года “Инерциальная навигационная система” автор Щипицын А.Г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| Инерциальный навигационный комплекс для высокоскоростного маневренного объекта | 2016 |
|
RU2657293C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1979 |
|
SU778455A1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АНТЕННОЕ УСТРОЙСТВО С ЛИНЕЙНОЙ ПОЛЯРИЗАЦИЕЙ | 2005 |
|
RU2282287C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ ПРОГРАММНОГО И АППАРАТНОГО ОБЕСПЕЧЕНИЯ ПОЛЁТНОГО КОНТРОЛЛЕРА | 2023 |
|
RU2799166C1 |
Изобретение относится к области приборостроения и может быть использовано при создании инерциальных навигационных систем. Инерциальная навигационная система, установленная на объекте, состоит из подвижной платформы, механически соединенной с двигателем, установленным на объекте, на которой установлен датчик поступательного или углового движения, соединенный через передающий блок с вычислительным блоком, и дополнительной подвижной платформы, на которой устанавливается другой датчик. Обе платформы выполнены двухстепенными, а измерительные оси установленных на них датчиков перпендикулярны внутренним осям платформ. Передающий блок выполнен в виде скользящих контактов. Датчики углового и поступательного движения соединены с бортовым вычислителем через передающие блоки, расположенные по внешним и внутренним осям платформ. Внутренняя ось каждой платформы механически соединена с собственным управляемым двигателем, установленным на внешней оси соответствующей платформы, а внешняя ось каждой платформы механически соединена с собственным двигателем, установленным на объекте. Управляемые двигатели, установленные на внешних осях платформ, соединены с вычислительным блоком через передающие блоки, расположенные по внешним осям платформ, а управляемые двигатели, установленные на объекте, соединены с вычислительным блоком непосредственно. Техническим результатом является повышение динамической точности восстановления векторов углового и поступательного движения объекта. 2 ил.
Инерциальная навигационная система, установленная на объекте и содержащая подвижную платформу, механически соединенную с двигателем, установленным на объекте, датчики поступательного и углового движения, один из которых, например поступательного движения, установлен на платформе и соединен через передающий блок с бортовым вычислителем, отличающаяся тем, что она снабжена второй подвижной платформой, на которой установлен другой датчик, например углового движения, и обе платформы выполнены двухстепенными, а каждый датчик установлен на платформе так, что его измерительная ось перпендикулярна внутренней оси платформы, причем датчики поступательного и углового движения соединены с бортовым вычислителем через передающие блоки, выполненные в виде скользящих контактов и расположенные по внешним и внутренним осям платформ, при этом внутренняя ось каждой платформы механически соединена с собственным управляемым двигателем, установленным на внешней оси соответствующей платформы и связанным с бортовым вычислителем через передающий блок, выполненный в виде скользящих контактов, расположенный по внутренней оси этой платформы, а внешняя ось каждой платформы механически соединена с соответствующим управляемым двигателем, установленным на объекте и связанным с бортовым вычислителем.
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1979 |
|
SU778455A1 |
| ПЕЛЬПОР Д.С | |||
| и др | |||
| Гироскопические системы | |||
| Гироскопические приборы и системы | |||
| - М.: Высшая школа, 1977, с.314 | |||
| Устройство для стабилизации скорости электрического двигателя | 1932 |
|
SU33219A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| US 4085440 А, 18.04.1978. | |||

