Изобретение относится к техническим средствам обучения операторов систем управления, а именно к тренажерам для изучения принципа построения авиагоризонтов.
Известна демонстрационная гировертикаль (Полезная модель №20600, МПК G09B 9/00. Демонстрационная вертикаль / Белаид М.М., Кривошеев С.В. и др. Опубл. 10.11.2001. Бюл. №31), которая позволяет аппаратно строить гировертикали с различными типами коррекции.
Однако она не предполагает формирование обучающимся контуров коррекции с проверкой правильности включения основных узлов: маятниковых чувствительных элементов и коррекционных моторов, а также особенностей их функционирования с последующей оценкой качества ответов.
В качестве прототипа выбран тренажер для изучения свойств гироскопа (Авторское свидетельство СССР №1125221, МПК G09B 9/00. Тренажер для изучения свойств гироскопа / Кривошеев С.В., Кушко В.И. // БИ 1978. №43), содержащий блок ввода учебной информации, логический блок и блок отображения параметров изучаемого объекта, блок имитации движения оси ротора гироскопа, логический блок содержит узлы логического сложения и логического совпадения, а блок ввода учебной информации имеет узел задатчиков внешних воздействий гироскопа, узел задатчиков угловых скоростей прецессии гироскопа, узел задатчиков гироскопических моментов и узел индикации функционирования задатчиков, при этом выходы узлов задатчиков внешних воздействий гироскопа, угловых скоростей прецессии гироскопа и гироскопических моментов соединены с соответствующими входами узла индикации функционирования задатчиков и соответствующими входами узла логических совпадений, подключенного выходами к входам узла логического сложения, выходы которого через блок имитации движения оси ротора гироскопа связаны с входом блока отображения параметров изучаемого объекта.
Одной из основных проблем при изучении правила прецессии гироскопических приборов является умение грамотно применять правило прецессии в различных режимах работы приборов.
В изобретении на примере тренажера для изучения авиагоризонта введены технические решения, которые позволяют оператору (обучающемуся) самостоятельно выработать навыки на применение правила прецессии при построении авиагоризонтов.
Недостатком известного устройства является невысокие демонстрационные возможности показа принципа построения авиагоризонта и отсутствие возможности изучения его работы.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в расширении дидактических и демонстрационных возможностей, связанных с особенностями построения авиагоризонтов.
Технический результат достигается тем, что в тренажер для изучения авиагоризонта, содержащий блок ввода учебной информации, имеющий узел задатчиков внешних воздействий, узел задатчиков угловых скоростей прецессии и узел индикации функционирования задатчиков, логический блок с первым и вторым узлами логического совпадения, первым и вторым узлами логического сложения, блок имитации движения оси ротора гиромотора, блоки индикации правильности ответа, отличающийся тем, что в блок ввода учебной информации введены узел задатчиков положения оси ротора гиромотора, узел задатчиков коррекционных моторов, узел задатчиков маятниковых чувствительных элементов, узел задатчиков соотношения переходных сопротивлений контактов маятниковых чувствительных элементов, задатчик сигнала формирования ответа и управляемый коммутатор, при этом в логический блок дополнительно введены третий, четвертый и пятый узлы логического совпадения, а выходы узлов задатчиков внешних воздействий и задатчиков угловых скоростей прецессии подключены к входам первого узла логического совпадения, выходы задатчиков положения оси ротора гиромотора и задатчиков коррекционных моторов соединены с входами второго узла логического совпадения, при этом выходы первого и второго узлов логического совпадения подключены к соответствующим входам третьего узла логического совпадения, выходы которых соединены с первым узлом логического сложения, выходы узла задатчиков маятниковых чувствительных элементов и выходы узла задатчиков соотношения переходных сопротивлений контактов маятниковых чувствительных элементов подключены к соответствующим входами четвертого узла логического совпадения, выходы которого вместе с выходами узла задатчиков положения оси ротора гиромотора соединены с входами пятого узла логического совпадения, выходы которого соединены с входами второго узла логического сложения, одновременно на первый и второй управляющие входы управляемого коммутатора подключены первый и второй выход логического блока, на сигнальный вход подключен выход задатчика сигнала формирования ответа, а три сигнальных выхода соединены с соответствующими входами блоков отображения правильности ответа, при этом третий выход управляемого коммутатора, а также четыре выхода узла задатчиков положения оси ротора гиромотора соединены с блоком имитации движения оси ротора гиромотора.
Сущность изобретения поясняется чертежами, представленными на фиг. 1 - фиг. 5 и фото 1:
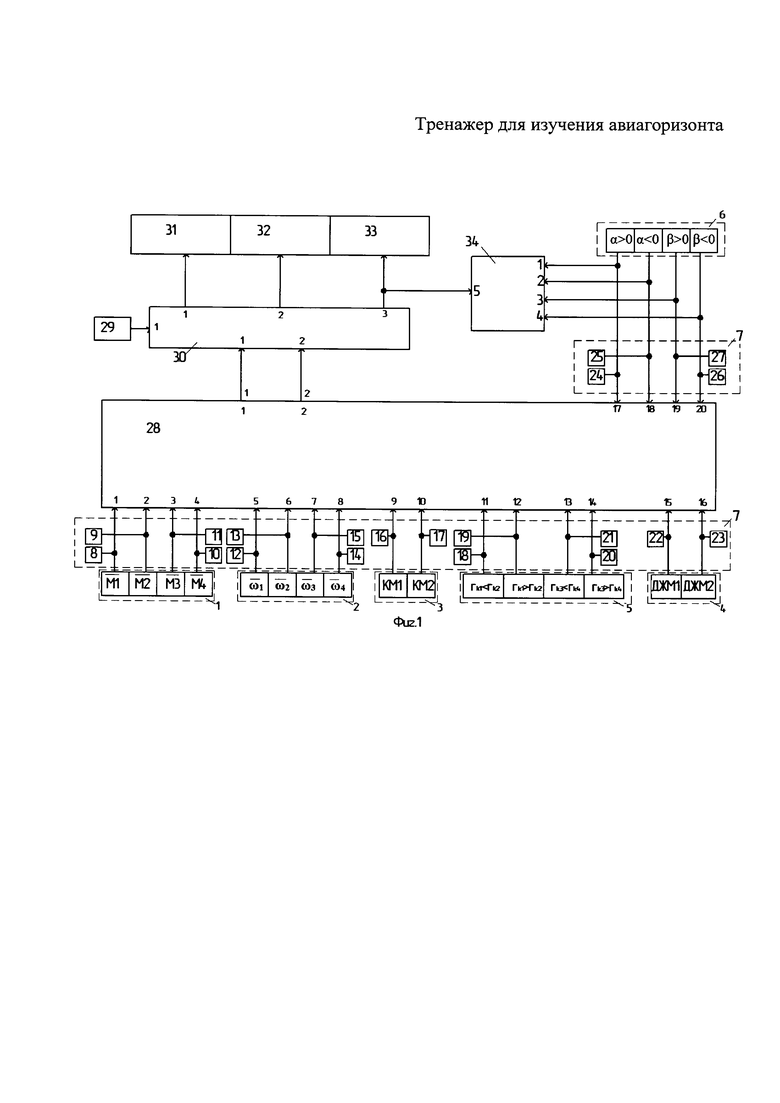
фиг. 1 - функциональная блок-схема тренажера;
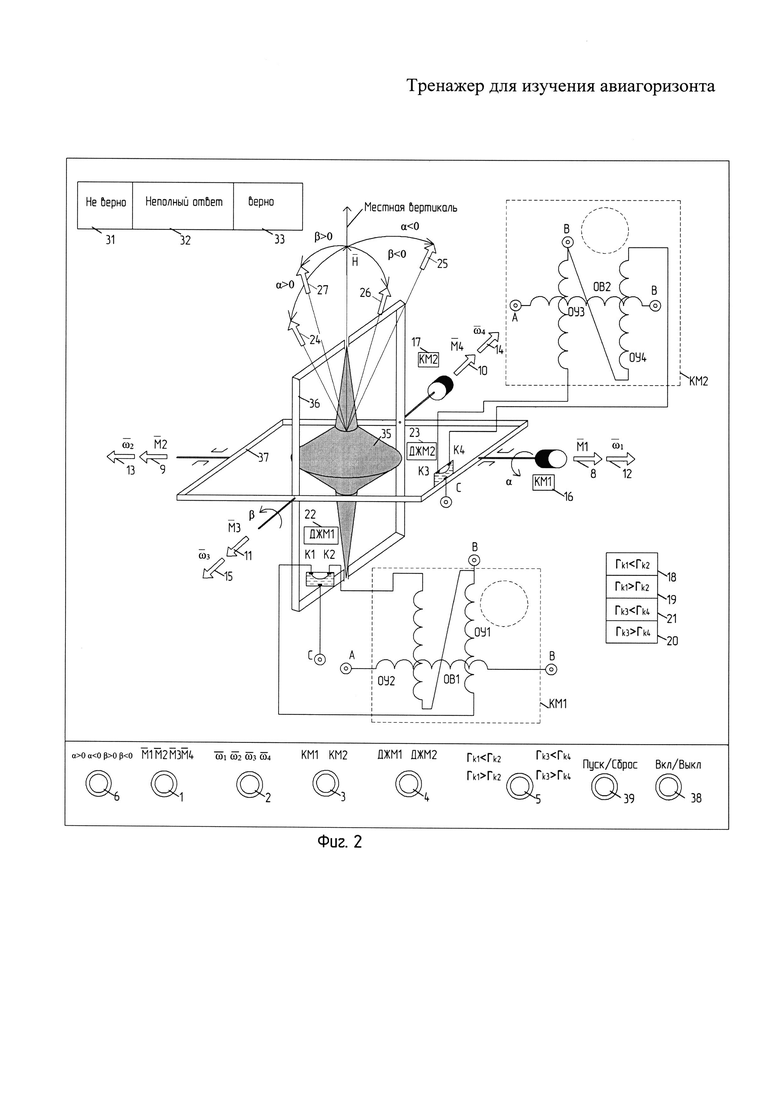
фиг. 2 - передняя панель тренажера, на которой изображена кинематическая схема авиагоризонта;
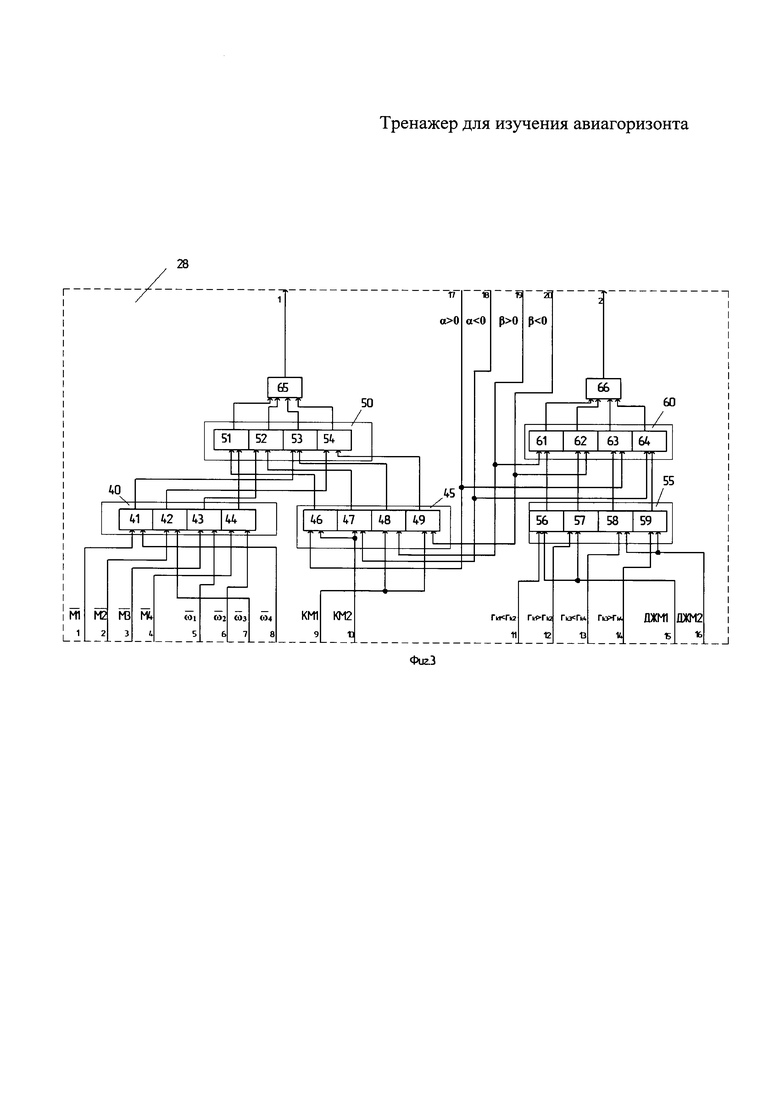
фиг. 3 - реализация логического блока 28;
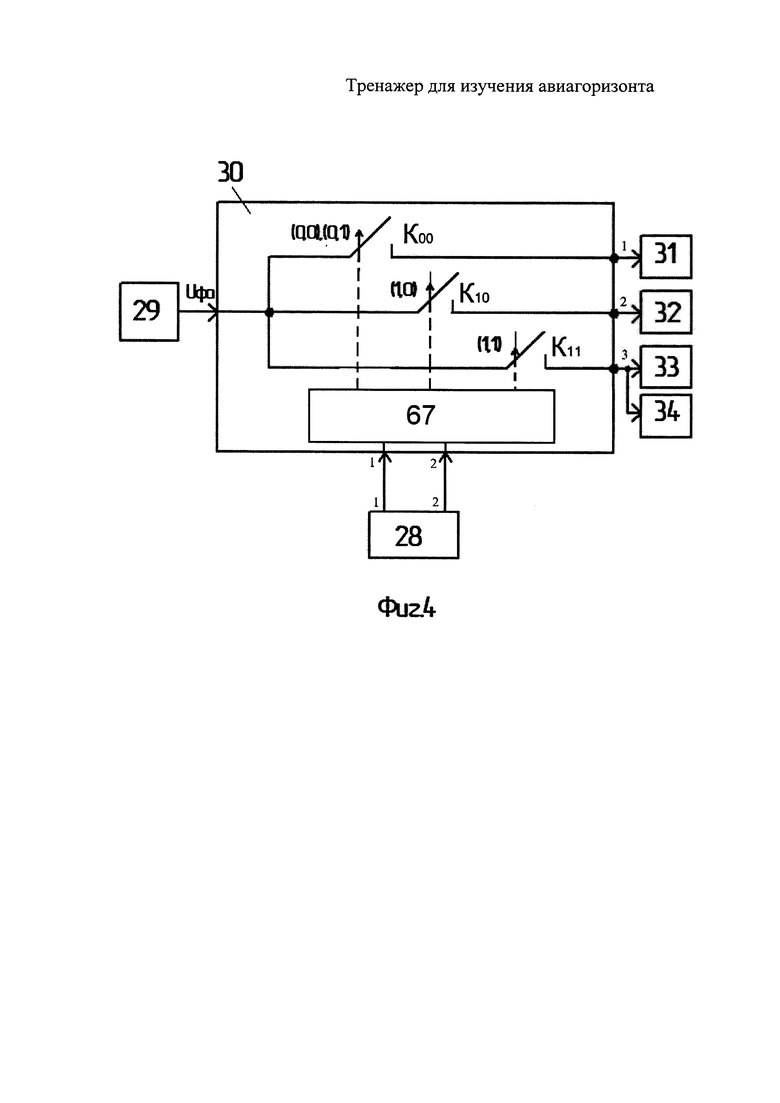
фиг. 4 - реализация управляемого коммутатора 30;
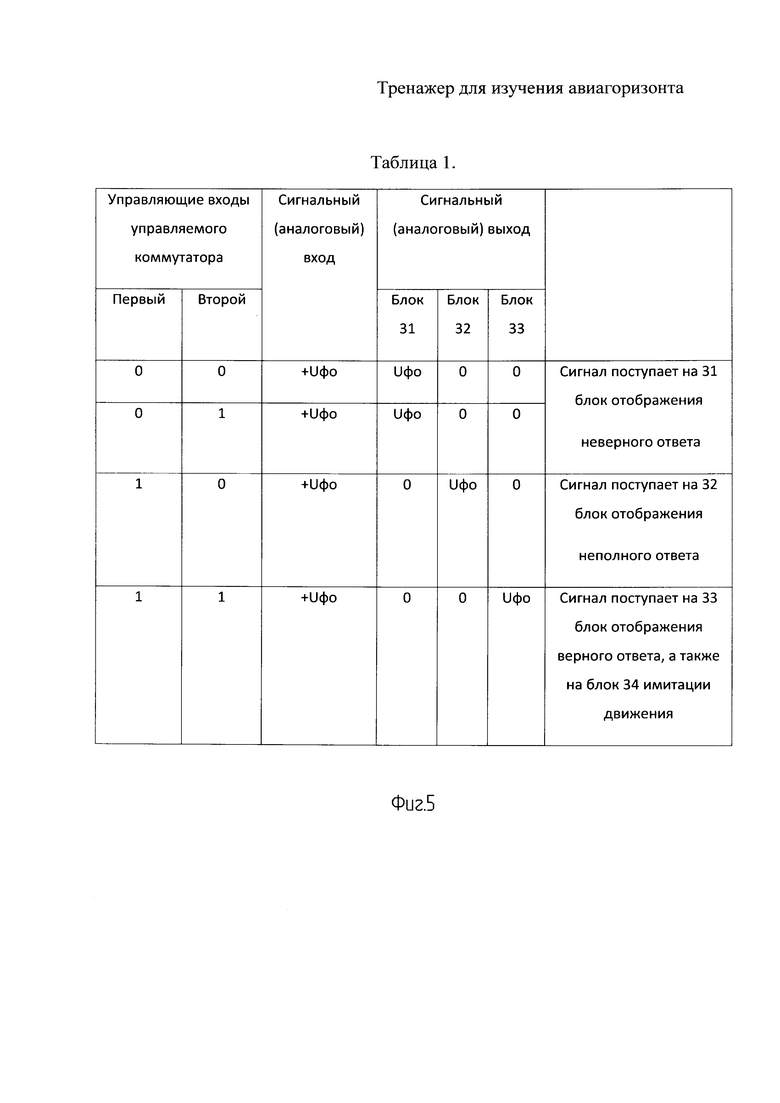
фиг. 5 - таблица 1: пояснение работы управляемого коммутатора 30;
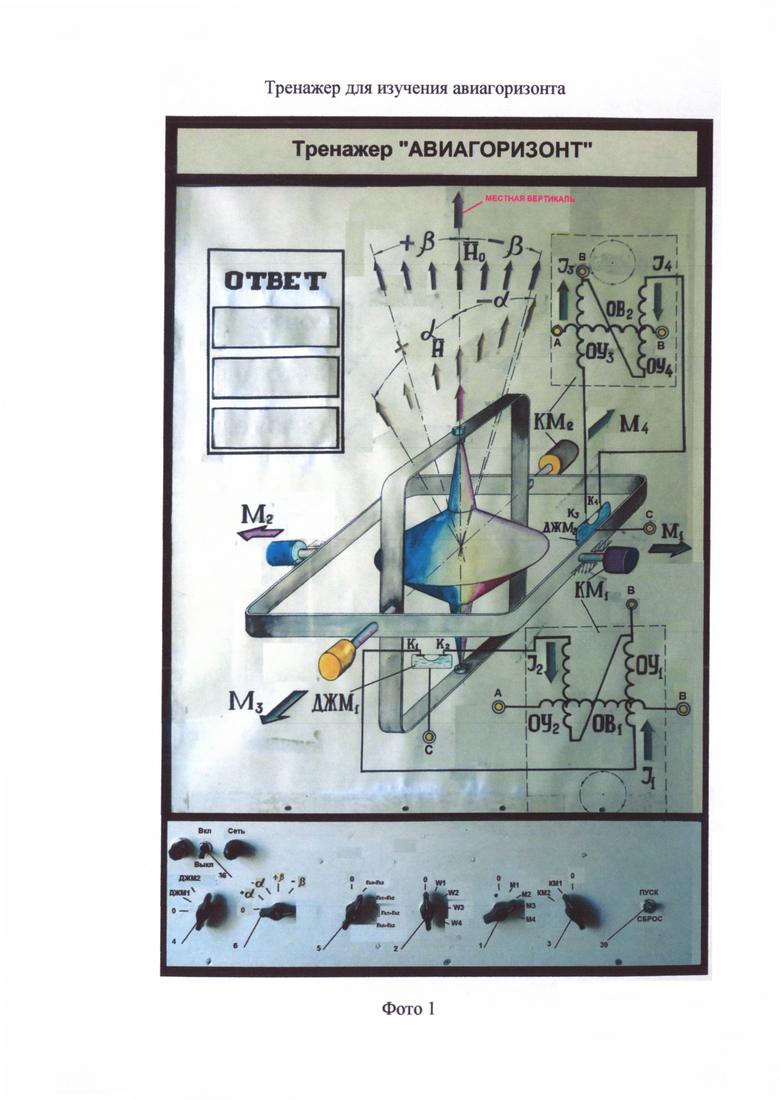
фото 1 - фотография передней панели тренажера для изучения авиагоризонта.
На чертежах и фотографии приняты следующие обозначения.
1 - узел задатчиков внешних воздействий (моментов  ,
,  ,
,  ,
,  );
);
2 - узел задатчиков угловых скоростей прецессии  ,
,  ,
,  ,
,  ;
;
3 - узел задатчиков коррекционных моторов: КМ1-продольной коррекции, КМ2-поперечной коррекции;
4 - узел задатчиков маятниковых чувствительных элементов ДЖМ1, ДЖМ2 (датчики жидкостные маятниковые);
5 - узел задатчиков соотношения переходных сопротивлений контактов маятниковых чувствительных элементов rk1>rk2, rk1<rk2, rk3>rk4, rk3<rk4;
6 - узел задатчиков положения оси ротора гиромотора (вектора кинетического момента  ) α>0, α<0, β>0, β<0;
) α>0, α<0, β>0, β<0;
7 - узел индикации функционирования задатчиков:
8-11 - индикаторы задатчиков внешних воздействий;
12-15 - индикаторы задатчиков угловых скоростей прецессии;
16-17 - индикаторы задатчиков коррекционных моторов КМ1, КМ2;
18-21 - индикаторы задатчиков соотношения переходных сопротивлений контактов маятниковых чувствительных элементов rk1>rk2, rk1<rk2, rk3>rk4, rk3<rk4
22-23 - индикаторы задатчиков маятниковых чувствительных элементов ДЖМ1, ДЖМ2;
24-27 - индикаторы задатчиков положения оси ротора гиромотора α>0, α<0, β>0, β<0;
28 - логический блок имеет двадцать входов и два выхода;
29 - задатчик сигнала формирования ответа;
30 - управляемый коммутатор;
31 - блок отображения неверного ответа - Неверно;
32 - блок отображения неполного ответа - Неполный ответ;
33 - блок отображения правильного ответа - Верно;
34 - блок имитации движения оси ротора гиромотора;
35 - гиромотор, ось ротора которого совпадает с направлением вектора кинетического момента ;
36 - внутренняя рама карданового подвеса;
37 - наружная рама карданового подвеса;
38 - кнопка «Вкл./выкл.» питания;
39 - кнопка «Пуск»/«Сброс»;
40 - первый блок логических совпадений, состоящий из четырех двухвходовых элементов «И» 41-44;
45 - второй блок логических совпадений, состоящий из четырех двухвходовых элементов «И» 46-49;
50 - третий блок логических совпадений, состоящий из четырех двухвходовых элементов «И» 51-54;
55 - четвертый блок логических совпадений, состоящий из четырех двухвходовых элементов «И» 56-59;
60 - пятый блок логических совпадений, состоящий из четырех двухвходовых элементов «И» 61-64;
65 - первый элемент логического сложения «ИЛИ», имеет четыре входа и один выход;
66 - второй элемент логического сложения «ИЛИ», имеет четыре входа и один выход;
67 - логическая схема.
Кроме цифровых обозначений имеются:
контакты ДЖМ1 обозначены К1 и К2, а ДЖМ2 - соответственно К3 и К4.
Кроме того, на передней панели стенда представлены электрические схемы подключения ДЖМ1 и ДЖМ2 к коррекционным моторам КМ1 и КМ2, которые представляют собой управляемые двухфазные индукционные двигатели с короткозамкнутыми роторами типа «беличье колесо». Статорные обмотки обозначены: ОВ1 и ОВ2 - обмотки возбуждения; ОУ1 и ОУ2, ОУ3 и ОУ4 - обмотки управления. Фазы трехфазного питания обозначены: А, В, С. Схемы включения приведены для наглядности и существо изобретения не затрагивают.
Управляемый коммутатор 30 имеет аналоговые ключи К00, К01 и К11, управляемые по сигналам логической схемы 67 с двумя входами.
Пояснение работы управляемого коммутатора 30.
Управляемый коммутатор 30 имеет аналоговые ключи К00, К01 и К11, управляемые по сигналам логической схемы 67 с двумя входами, которые являются первым и вторым выходами логического блока 28, через которые могут передаваться сигналы логической единицы «1» или логического нуля «0». В скобках рядом с ключами К00, К01 и К11 указано соотношение логических сигналов на первом и втором выходах логического блока 28 (на первом и втором управляемых входах коммутатора 30).
Если с первого выхода логического блока 28 поступает сигнал логического нуля «0», то сигнал, поступающий со второго выхода логического блока 28, значения не имеет, в этом случае в управляемом коммутаторе 30 замыкается ключ К00 и сигнал Uфо передается на первый сигнальный выход блока 30 и, соответственно, на вход блока 31 для индикации ответа «Неверно».
Если с первого выхода логического блока 28 поступает сигнал логической единицы «1», а со второго выхода поступает сигнал логического нуля «0», то в этом случае в управляемом коммутаторе 30 замыкается ключ К10 и сигнал Uфо передается на второй сигнальный выход блока 30 и, соответственно, на вход блока 32 для индикации ответа «Неполный ответ».
Если с первого и второго выходов логического блока 28 поступают сигналы логической единицы «1», то в этом случае в управляемом коммутаторе 30 замыкается ключ К11 и сигнал Uфо передается на третий сигнальный выход блока 30 и, соответственно, на вход блока 33 для индикации ответа «Верно», а также на вход блока 34 для имитации возвращения оси ротора гиромотора из отклоненного положения в исходное вертикальное положение.
Наглядное пояснение работы управляемого коммутатора 30 поясняет фиг. 5 (таблица 1).
Тренажер для изучения авиагоризонта состоит из гиромотора 35, помещенного в кардановый подвес с внутренней 36 и наружной 37 рамами. Положение оси ротора гиромотора в исходном положении совпадает с вектором кинетического момента. Варианты положения оси ротора гиромотора, обозначенные с помощью индикаторов 24, 25, 26, 27, задаются узлом 6. На оси наружной рамы карданового подвеса 37 расположен коррекционный мотор продольной коррекции КМ1 с индикатором 16, а на оси внутренней рамы карданового подвеса 36 расположен коррекционный мотор поперечной коррекции КМ2 с индикатором 17, выбор которых осуществляется узлом 3. Варианты направлений внешних воздействий обозначены индикаторами 8, 9, 10, 11, выбор которых происходит узлом 1. Варианты выбора направлений угловых скоростей прецессии, изображенные индикаторами 12, 13, 14, 15, производится узлом 2. На внутренней раме карданового подвеса 36 установлен маятниковый чувствительный элемент, отмеченный индикатором 22, варианты соотношений переходных сопротивлений контактов которого обозначены индикаторами 18, 19. На наружной раме карданового подвеса 37 - маятниковый чувствительный элемент, отмеченный индикатором 23, варианты соотношений переходных сопротивлений контактов которого обозначены индикаторами 20, 21. Выбор маятникового чувствительного элемента производится узлом 4, а выбор соотношений переходных сопротивлений производится узлом 5.
Выходы узлов задатчиков 1, 2, 3, 4, 5 и 6 в соответствии с идеей построения авиагоризонта подключаются к входам блоков логических совпадения 40, 45 и 55. Так, выходы узлов задатчиков 1 и 2 соединены с соответствующими входами первого блока логических совпадений 40, состоящего из четырех двухвходовых элементов «И» 41-44. К входам второго блока логических совпадений 45, состоящего из четырех двухвходовых элементов «И» 46-49, подключены выходы узлов задатчиков 3 и 6, а выходы узлов задатчиков 4, 5 соединены с входами четвертого блока логических совпадений 55, состоящего из четырех двухвходовых элементов «И» 56-59. Выходы первого и второго блоков логических совпадения 40, 45 подключены к входам третьего блока логических совпадений 50, состоящего из четырех двухвходовых элементов «И» 51-54, выходы которого соединены с входами первого элемента логического сложения 65.
Выходы четвертого блока логических совпадений 55 и выход узла 6 подключены к входам пятого блока логических совпадений 60, состоящего из четырех двухвходовых элементов «И» 61-64, выходы которого соединены с входами второго элемента логического сложения 66.
Выходы первого и второго элементов логического сложения 65, 66 служат первым и вторым управляющими входами для управляемого коммутатора 30, на сигнальный вход которого подключен выход задатчик сигнала формирования ответа 29. Три сигнальных выхода управляемого коммутатора 30 подключены к входам блоков: первый - к блоку отображения неверного ответа 31; второй - к блоку отображения неполного ответа 32; третий - к блоку отображения правильного ответа 33, а также третий выход управляемого коммутатора 30 соединен с входом блока имитации движения оси ротора гиромотора 34 вместе с выходами узла 6.
Кнопка 39 запускает проверку или сбрасывает выбираемые данные, а кнопка 38 включает/выключает питание.
Тренажер работает в режиме проверки правильности функционирования систем продольной и поперечной коррекции при четырех вариантах отклонения оси ротора гиромотора (вектора кинетического момента ) от местной вертикали: β>0 или β<0 - для продольной коррекции, α>0 или α<0 - для поперечной коррекции.
Входные данные подаются на логический блок 28 путем нажатия соответствующих кнопок. Например, при первом нажатии кнопки 6 (фиг. 2) вводится логическая единица «1», соответствующая α>0, на 46 и 63 элементы «И», при этом на элементы «И» 47-49, а также на элементы 61, 62, 64 будут поданы сигналы логического «0». При втором нажатии кнопки 6 (фиг. 2) вводится логическая единица «1», соответствующая α<0, на 47 и 64 элементы «И», при этом на элементы «И» 46, 48, 49, а также на элементы 61-63 будут поданы сигналы логического «0». И так последовательно до выбора четвертого элемента β<0. При пятом нажатии возникает ситуация, соответствующая первому нажатию кнопки 6, и т.д.
Работу тренажера в каждом из вариантов можно разделить на два этапа.
Этап 1. Проверка знаний на применение правила прецессии. Определить: действующий коррекционный мотор КМ1 или КМ2; момент  , создаваемый коррекционными моторами КМ1 или КМ2; угловую скорость прецессии
, создаваемый коррекционными моторами КМ1 или КМ2; угловую скорость прецессии  , которая при этом возникает.
, которая при этом возникает.
Этап 2. Проверка знаний по построению систем коррекции на основе ДЖМ1 или ДЖМ2.
Этот этап состоит в определении действующего маятникового чувствительного элемента ДЖМ1 или ДЖМ2 и соотношения переходных сопротивлений контактов маятниковых чувствительных элементов, которые возникают при заданных отклонениях вектора от местной вертикали.
Определить: действующий маятниковый чувствительный элемент ДЖМ1 или ДЖМ2; соотношение переходных сопротивлений контактов маятниковых чувствительных элементов.
Для ДЖМ1: rk1>rk2 или rk1<rk2. Для ДЖМ2: rk3>rk4 или rk3<rk4.
В качестве примера рассмотрим вариант работы тренажера при отклонении оси ротора гиромотора от местной вертикали на α>0.
Кнопкой 38 включается питание (фиг. 2).
С помощью узла 6 выбирается α>0. При этом сигнал логической единицы (фиг. 3) «1» передается на 46 элемент «И» второго блока логических совпадений 45 и 63 элемент «И» пятого блока логических совпадений 60, а также на блок имитации движения оси ротора гиромотора 34. На входы элементов «И» 47-49 поступят сигналы логических нулей «0». В результате чего ось ротора гиромотора (вектор ) отклоняется в положение 24 (Фиг. 2).
Этап 1.
Для приведения вектора на местную вертикаль выбираем коррекционный мотор поперечной коррекции КМ2, выбор производится при помощи узла 3. Сигнал логической единицы «1» передается на 46 и 47 элементы «И» второго блока логических совпадений 45. Так как на вход логического элемента 46 «И» поступили два сигнала логической единицы «1», то на его выходе возникает тоже сигнал логической единицы «1», который поступает на 51 элемент «И» третьего блока логических совпадений 50.
Элементы «И» 47, 48, 49 второго блока логических совпадений 45 передают сигналы логического нуля «0».
Момент М4, создаваемый коррекционным мотором КМ2, выбирается с помощью узла 1 (Фиг. 1). Сигнал логической единицы «1» передается на 44 элемент «И» первого блока логических совпадений 40.
Гироскоп при этом должен прецессировать с угловой скоростью  , которая выбирается с помощью узла 2. Сигнал логической единицы «1» передается на второй вход двухвходового элемент «И» 44 первого блока логических совпадений 40.
, которая выбирается с помощью узла 2. Сигнал логической единицы «1» передается на второй вход двухвходового элемент «И» 44 первого блока логических совпадений 40.
Так как на вход логического элемента 44 «И» поступили два сигнала логической единицы «1», значит, на его выходе возникает тоже сигнал логической единицы «1», который поступает на 51 элемент «И» третьего блока логических совпадений 50.
Элементы 41, 42, 43 «И» первого блока логических совпадений 40 передают сигналы логического нуля «0».
Так как на входы логического элемента 51 «И» поступили два сигнала логической единицы «1», то на его выходе возникает тоже сигнал логической единицы «1», который поступая на один из входов первого элемента логического сложения 65 «ИЛИ», на выходе которого возникает сигнал логической единицы, поступающий на первый вход управляемого коммутатора 30 (фиг. 1).
Управляемый коммутатор передает сигнал на 32 блок отображения неполного ответа (управляемый коммутатор 30 подаст сигнал с задатчика 29). В случае если один из параметров (коррекционный мотор, момент или угловая скорость прецессии) определен не правильно, управляемый коммутатор передает сигнал на 31 блок отображения неверного ответа.
Прежде чем переходить к решению задачи 2, следует проанализировать ход решения задачи 1 и добиться индикации правильного ответа.
Этап 2.
Задача на нахождение действующего маятникового чувствительного элемента ДЖМ1 или ДЖМ2 и соотношения переходных сопротивлений контактов выбранного маятникового чувствительного элемента.
Срабатывает маятниковый чувствительный элемент ДЖМ2, выбор производится узлом 4. Сигнал логической единицы «1» передается на 58 и 59 элементы «И» четвертого блока логических совпадений 55.
Выбирается вариант rk3<rk4 соотношения переходных сопротивлений контактов маятниковых чувствительных элементов, выбор производится узлом 5. Сигнал логической единицы «1» передается на 58 элемент «И» четвертого блока логических совпадений 55 (на элементы 56, 57, 59 поступят сигналы логического нуля «0»).
На вход логического элемента 58 «И» поступили два сигнала логической единицы «1», значит, на его выходе возникает тоже сигнал логической единицы «1», который поступает на 63 элемент «И» пятого блока логических совпадений 60.
Так как на вход логического элемента 63 «И» поступили два сигнала логической единицы «1», то на его выходе возникает тоже сигнал логической единицы «1», который, поступая на один из входов второго элемента логического сложения 66 «ИЛИ», создаст на его выходе сигнал логической единицы «1», поступающий на второй вход управляемого коммутатора 30.
На управляемые входы управляемого коммутатора поступили два сигнала логической единицы, поэтому управляемый коммутатор (в соответствии с логикой его работы) передает сигнал +Uфо с блока 29 на 33 блок отображения верного ответа, а также на 34 блок имитации движения оси ротора гиромотора, который возвращает вектор в исходное положение.
Нажатием на кнопку 39 производится сброс всех веденных параметров.
Для проверки работоспособности устройства был изготовлен тренажер «Авиагоризонт», на котором в качестве задающих элементов были применены галетные переключатели, а в качестве логических элементов - элементы «И-НЕ» и «ИЛИ-НЕ». Стенд опробован в лабораторном цикле дисциплины «Прикладная теория гироскопов».
Фотография передней панели стенда представлена на фото 1. В нижней части стенда расположены органы управления с обозначениями, как на фиг. 2.
На фото 1 кроме позиций, обозначенных на фиг. 2, имеются дополнительные обозначения, которые к существу изобретения отношения не имеют - это токи в обмотках управления: ОУ1 и ОУ2 (J1 и J2); ОУ3 и ОУ4 (J3 и J4), поясняющие для наглядности подключение ДЖМ1 и ДЖМ2 к соответствующим обмоткам управления КМ1 и КМ2, обмотки возбуждения которых обозначены ОВ1 и ОВ2.
Таким образом, тренажер может использоваться при самоподготовке к экзаменам и лабораторным работам, служить эффективным контролирующим устройством, а также демонстрировать работу авиагоризонта при чтении учебных лекций. Использование тренажера в учебном процессе позволит улучшить усвоение материала при изучении авиагоризонта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для изучения гирополукомпаса | 2021 |
|
RU2761381C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| Тренажер для изучения свойств гироскопа | 1983 |
|
SU1125221A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Тренажер операторов гироскопических приборов | 1984 |
|
SU1241277A1 |
| Установка для демонстрации микромеханического авиагоризонта | 2021 |
|
RU2758807C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| Устройство для демонстрации гироавтомобиля | 1982 |
|
SU1042066A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
Изобретение относится к техническим средствам обучения операторов систем управления, а именно к тренажерам для изучения принципа построения авиагоризонтов. Тренажер содержит блок ввода учебной информации, узел индикации, логический блок, блок имитации движения оси ротора гиромотора и блок отображения правильности решения. На передней панели тренажера изображена кинематическая схема авиагоризонта и располагаются органы управления блока ввода учебной информации. Отдельные функциональные элементы передней панели подсвечиваются с помощью узла индикации, блока имитации движения и блока отображения правильности решения. С помощью блока ввода учебной информации выбирают исходные данные и параметры, определяющие правильное построение систем коррекции авиагоризонта. Выбранные параметры отображаются на узле индикации. На вход логического блока поступают сигналы с блока ввода учебной информации. В зависимости от выходных сигналов логического блока аналоговый коммутатор формирует отображение о правильности построения систем коррекции. В случае правильного ответа движение вектора кинетического момента имитируется с помощью блока имитации движения. Техническим результатом является улучшение усвоения материала при изучении авиагоризонта. 6 ил.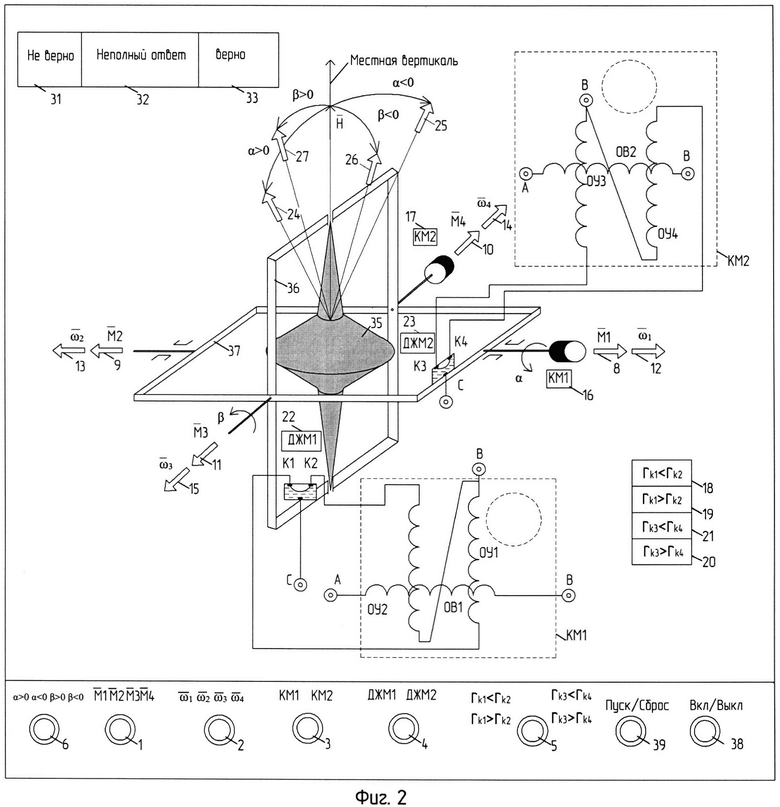
Тренажер для изучения авиагоризонта, содержащий блок ввода учебной информации, имеющий узел задатчиков внешних воздействий, узел задатчиков угловых скоростей прецессии и узел индикации функционирования задатчиков, логический блок с первым и вторым узлами логического совпадения, первым и вторым узлами логического сложения, блок имитации движения оси ротора гиромотора, блоки индикации правильности ответа, отличающийся тем, что в блок ввода учебной информации введены узел задатчиков положения оси ротора гиромотора, узел задатчиков коррекционных моторов, узел задатчиков маятниковых чувствительных элементов, узел задатчиков соотношения переходных сопротивлений контактов маятниковых чувствительных элементов, задатчик сигнала формирования ответа и управляемый коммутатор, при этом в логический блок дополнительно введены третий, четвертый и пятый узлы логического совпадения, а выходы узлов задатчиков внешних воздействий и задатчиков угловых скоростей прецессии подключены к входам первого узла логического совпадения, выходы задатчиков положения оси ротора гиромотора и задатчиков коррекционных моторов соединены с входами второго узла логического совпадения, при этом выходы первого и второго узлов логического совпадения подключены к соответствующим входам третьего узла логического совпадения, выходы которых соединены с первым узлом логического сложения, выходы узла задатчиков маятниковых чувствительных элементов и выходы узла задатчиков соотношения переходных сопротивлений контактов маятниковых чувствительных элементов подключены к соответствующим входами четвертого узла логического совпадения, выходы которого вместе с выходами узла задатчиков положения оси ротора гиромотора соединены с входами пятого узла логического совпадения, выходы которого соединены с входами второго узла логического сложения, одновременно на первый и второй управляющие входы управляемого коммутатора подключены первый и второй выход логического блока, на сигнальный вход подключен выход задатчика сигнала формирования ответа, а три сигнальных выхода соединены с соответствующими входами блоков отображения правильности ответа, при этом третий выход управляемого коммутатора, а также четыре выхода узла задатчиков положения оси ротора гиромотора соединены с блоком имитации движения оси ротора гиромотора.
| Тренажер для изучения свойств гироскопа | 1983 |
|
SU1125221A1 |
| US 4558604 A1, 17.12.1985 | |||
| Приспособление для разрезания ткани | 1930 |
|
SU20600A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

