Изобретение относится к способам получения информации о местонахождении транспортного средства (ТС) и может быть использовано для навигации транспортных средств, преимущественно - инструментальной навигации морских и речных судов с помощью электронных картографических информационных систем и навигационных радиолокаторов с функцией автоматического захвата и сопровождения радиолокационных целей.
Общеизвестно, что в настоящее время основным способом определения географических координат судна в морской навигации является использование глобальных навигационных спутниковых систем (ГНСС). В связи с известными уязвимостями ГНСС, приводящими к снижению точности определения места судна или невозможности получения координат и авариям судов по этой причине, стандарты Международной Морской организации (IMO) обоснованно требуют дублирование обсерваций независимыми способами [Резолюция IMO MSC.232]. Конвенция IMO STCW с поправками 2010 года также требует при несении ходовой вахты определять место судна альтернативными методами. В практике морской навигации используются различные альтернативные способы определения места судна, основанные на измерении направлений и/или дистанций до береговых ориентиров, а также определение места астрономическими способами по небесным ориентирам, например: [Навигация. Баранов Ю.К. Гаврюк М.И. и др. СПб.: Издательство «Лань», 1997.], [Математические основы судовождения Кожухов В.П. и др. М.: Транспорт, 1993], [The American practical navigator, Nathaniel Bowditch, National imagery and mapping agency, 2002]. Большинство этих способов, за исключением ГНСС и радионавигационных систем берегового базирования, требует участия человека для опознания берегового ориентира и выполнения измерений.
Известен, например, способ определения места судна по трем расстояниям, заключающийся в том, что измеряют расстояния посредством судовых радиолокационных средств от судна до береговых ориентиров, имеющих известное положение на плоскости, при этом используют три береговых ориентира, определяют расстояния между береговыми ориентирами, минимизируют сумму квадратичных ошибок измерений расстояний от судна до береговых ориентиров путем нахождения минимума квадратов погрешностей измерений, при этом местоположение судна на плоскости определяют путем использования трех полученных значений расстояний от судна до береговых ориентиров с минимизированной суммой квадратичных ошибок и расстояний между ориентирами (патент RU 2353947, МПК G01S 5/14, опубл. 27.04.2009 г.).
Помимо возможных ошибок в опознавании ориентира, приводящих к грубым ошибкам определения места судна, этот способ не позволяет автоматизировать определение места судна и. соответственно, не может являться полноценной альтернативой ГНСС.
Близким по технической сущности к заявляемому является способ определения местоположения самолета по радиолокационным ориентирам, описанный в патенте US 5661486 А (МПК G08G 5/04; G01S 13/95, опубл. 1997-08-26), включающий прием данных счислимого места ТС, курсоуказателя, радиолокационных целей и их навигационных параметров от навигационного радиолокатора, выбор данных радиолокационных ориентиров из базы данных в зоне возможного обнаружения радиолокатором с учетом погрешности счислимого места ТС, опознавание ориентиров, вычисление координат местоположения транспортного средства и поправки курсоуказателя. Опознавание (идентификация) ориентиров производится по критерию максимальной корреляции между радиолокационными сигнатурами ориентиров из базы данных и сигнатур, принятых радиолокатором сигналов, отраженных от наземных объектов. Дальнейшее вычисление координат самолета и поправки курсоуказателя производится по минимум трем ориентирам, используя их координаты из базы данных и измеренные радиолокатором пеленги и дистанции до этих ориентиров.
Недостаток прототипа заключается в том, что радиолокационный образ ориентира может изменяться во времени, например - из-за воздействия окружающей среды, загрязнения или частичного повреждения отражающей поверхности, что потребует постоянного мониторинга радиолокационных сигнатур для обеспечения надежной идентификации радиолокационных ориентиров на фоне ложных целей с подобными радиолокационными образами.
Задачей изобретения является создание способа автоматического определения местоположения транспортного средства по радиолокационным ориентирам дополнительно к ГНСС или вместо ГНСС в случае ее отказа или деградации, без использования радиолокационных сигнатур ориентиров.
Технический результат - надежная идентификация радиолокационных целей за счет исключения влияния погрешности счислимого места ТС и систематической ошибки курсоуказателя на результаты опознавания целей.
Задача решается, а технический результат достигается способом определения местоположения транспортного средства (ТС) по радиолокационным ориентирам, включающим прием данных счислимого места ТС, курсоуказателя, радиолокационных целей и их навигационных параметров от навигационного радиолокатора, выбор данных радиолокационных ориентиров из базы данных в зоне возможного обнаружения радиолокатором с учетом погрешности счислимого места ТС, опознавание ориентиров, вычисление координат местоположения транспортного средства и поправку курсоуказателя. В отличие от прототипа рассчитывают область видимости ориентиров как окружность с центром в точке счислимого места ТС и радиусом, равным выбранному диапазону радиолокатора, увеличенному на три среднеквадратические погрешности счислимого места ТС, затем рассчитывают зоны поиска целей как касательные по пеленгам и дистанциям к окружностям с радиусом, равным трем среднеквадратическим погрешностям счислимого места ТС, с центрами в точках с координатами радиолокационных ориентиров, а после приема данных о неподвижных точечных целях от радиолокатора выполняют автоматическое групповое опознавание радиолокационных целей, соответствующих выбранным радиолокационным ориентирам с известными географическими координатами путем нахождения соответствия между полигонами, образуемыми наблюдаемыми точечными неподвижными целями, и базовыми полигонами, вершинами которых являются радиолокационные ориентиры, для чего строят набор базовых треугольных полигонов, каждый из которых образован тремя радиолокационными ориентирами, вычисляют параметры внутренней геометрии полигонов, после чего, используя все наблюденные точечные неподвижные цели, аналогично строят набор треугольных наблюденных полигонов, образованных целями с измеренными навигационными параметрами относительно фактического места ТС, вычисляют параметры внутренней геометрии полигонов и далее для каждого базового полигона ищут соответствующий ему наблюденный полигон по критерию Q минимума квадрата разностей однотипных параметров внутренней геометрии полигона
Q=(Пij-Pik)2⇒min,
где:
Пij - значение i-го параметра внутренней геометрии базового полигона j;
Pik - значение i-го параметра внутренней геометрии полигона k, образованного наблюдаемыми неподвижными целями,
после чего устанавливают соответствие вершин базовых и выбранных наблюденных полигонов, отбраковывают ошибочные параметры и вычисляют координаты ТС по известным координатам ориентиров - вершинам базовых полигонов и измеренным радиолокатором навигационным параметрам, при этом всю последовательность действий повторяют после каждого оборота антенны радиолокатора, причем по серии обсерваций предвычисляют следующее счислимое место и его среднеквадратическую погрешность, а также - поправку курсоуказателя. Согласно изобретению параметры внутренней геометрии полигонов включают длины сторон, углы в вершинах, периметр или площадь, отношение максимальной стороны к минимальной.
Технический результат достигается за счет того, что в качестве анализируемых параметров базовых полигонов и полигонов, образованных наблюдаемыми неподвижными целями, используют только параметры внутренней геометрии полигонов, не связанные с географическим положением ориентиров: длины сторон, углы в вершинах, периметр или площадь, отношение максимальной стороны к минимальной. Способ не использует радиолокационные сигнатуры ориентиров, которые трудно поддерживать в актуальном состоянии для полей ориентиров значительной протяженности.
Сущность поясняется рисунками, где:
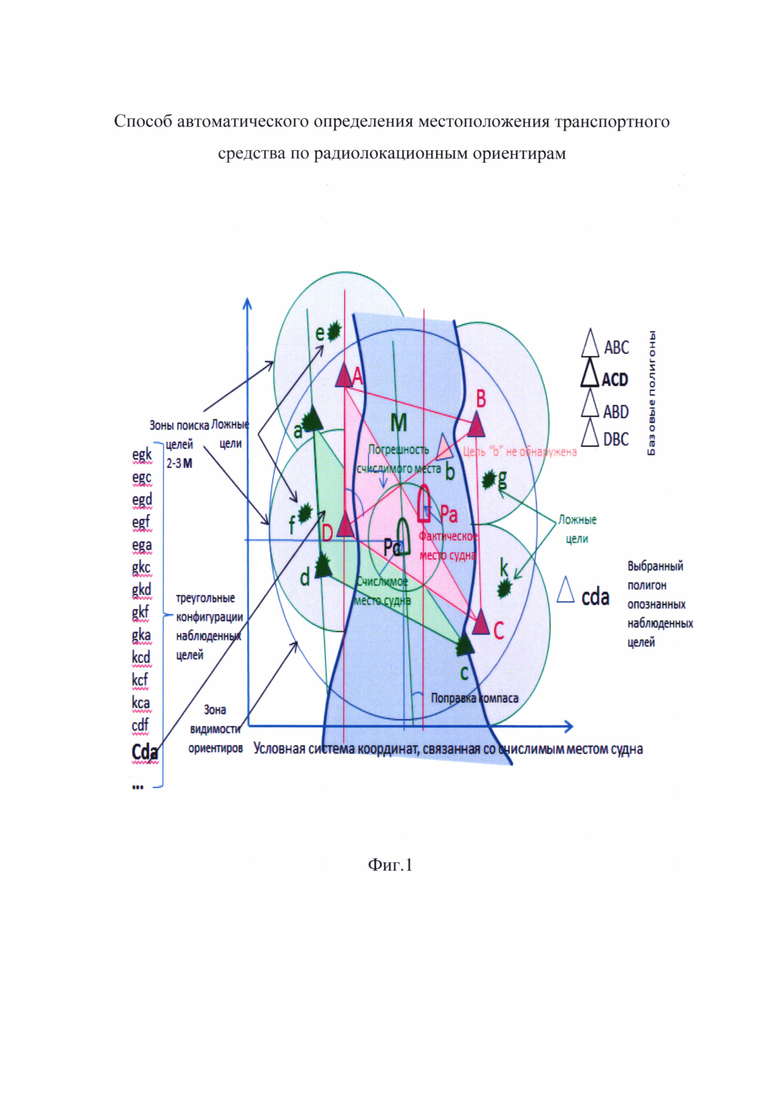
На фиг. 1 - приведен пример отображения на электронной карте позиции судна, картированных радиолокационных ориентиров и точечных неподвижных целей, наблюдаемых с помощью радиолокатора; показано взаимное расположение счислимого и фактического места ТС (судна), радиолокационных ориентиров, зон поиска целей вокруг радиолокационных ориентиров и наблюдаемых точечных неподвижных целей при отображении на электронной карте с привязкой к счислимому месту ТС, имеющему погрешность М.
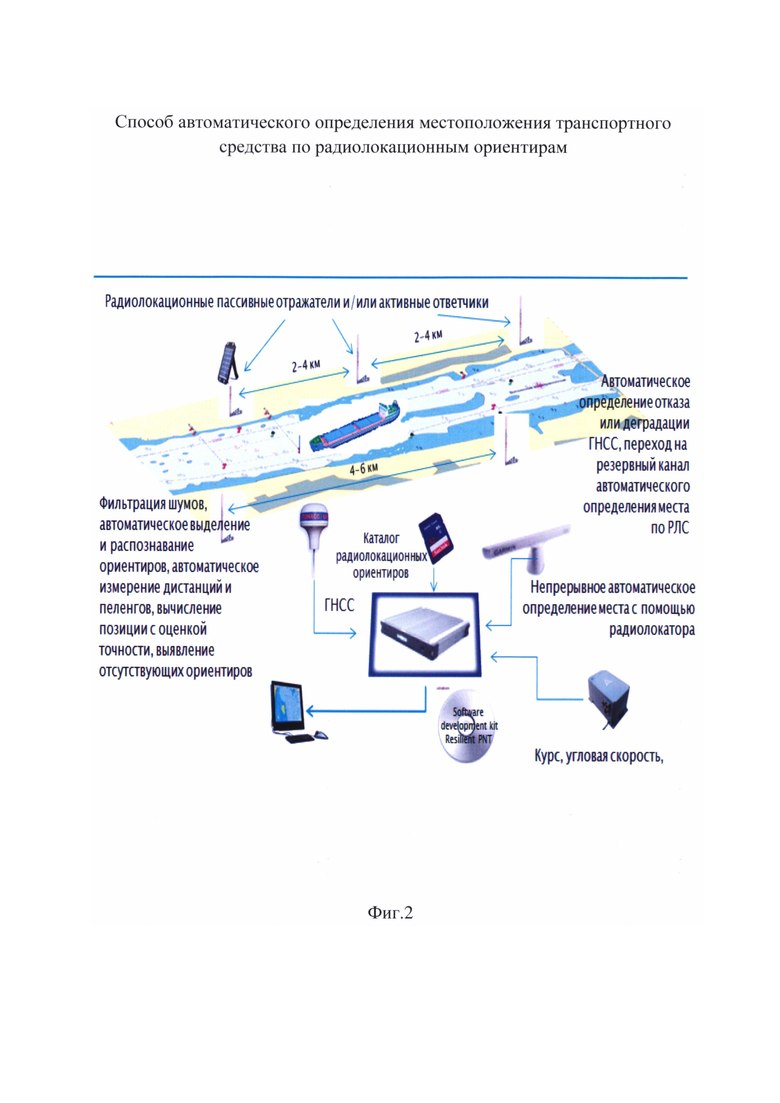
На фиг. 2 - проиллюстрирован пример осуществления изобретения в отдельном навигационном процессоре.
На фиг. 1 показано:
Рс - счислимое место ТС,
М - средняя квадратическая погрешность (СКП) счислимого места ТС,
Ра - фактическое (искомое) место ТС,
А, В, С, D - радиолокационные ориентиры с известными географическими координатами, которые могут наблюдаться из счислимого места Рс при выбранной шкале дальности радиолокатора,
а, с, d, е, f, g, k - точечные неподвижные цели, наблюдаемые и автоматически сопровождаемые с помощью радиолокатора с функцией САРП, с измеренными радиолокатором навигационными параметрами (пеленги и дистанции) относительно искомого (фактического) места ТС,
b - условное место не обнаруженной цели - радиолокационного ориентира В,
Z - зона видимости ориентиров, соответствующая выбранной шкале дальности РЛС, увеличенной на 2-3М (М - СКП счислимого места).
Способ осуществляют следующим образом.
Рассчитывают область видимости ориентиров как окружность с центром в точке счислимого места ТС и радиусом, равным выбранному диапазону радиолокатора, увеличенному на 3СКП счислимого места ТС. Из каталога радиолокационных ориентиров выбирают ориентиры, находящиеся в этой области. Рассчитывают области поиска точечных неподвижных целей, ограниченные касательными по пеленгам и дистанциям из счислимого места ТС к окружностям с радиусом, равным 3СКП счислимого места ТС, с центрами в точках с координатами радиолокационных ориентиров. От навигационного радиолокатора принимают данные радиолокационных целей и их навигационных параметров, обнаруженных в зонах поиска целей, от курсоуказателя - значение курса, вводят координаты счислимого места ТС и его СКП. После приема данных выполняют автоматическое групповое опознавание радиолокационных целей, соответствующих выбранным радиолокационным ориентирам с известными географическими координатами путем нахождения соответствия между полигонами, образуемыми наблюдаемыми точечными неподвижными целями, и базовыми полигонами, вершинами которых являются радиолокационные ориентиры, для чего строят набор базовых треугольных полигонов, каждый из которых образован тремя радиолокационными ориентирами, вычисляют параметры внутренней геометрии полигонов, после чего, используя все наблюденные точечные неподвижные цели, аналогично строят набор треугольных наблюденных полигонов, образованных целями с измеренными навигационными параметрами относительно фактического места ТС, вычисляют параметры внутренней геометрии полигонов и далее для каждого базового полигона ищут соответствующий ему наблюденный полигон по критерию Q минимума квадрата разностей однотипных параметров внутренней геометрии полигона
Q=(Пij-Pik)2⇒min,
где:
Пij - значение i-го параметра внутренней геометрии базового полигона j;
Pik - значение i-го параметра внутренней геометрии полигона k, образованного наблюдаемыми неподвижными целями,
после чего устанавливают соответствие вершин базовых и выбранных наблюденных полигонов, отбраковывают ошибочные параметры и вычисляют координаты ТС по известным координатам ориентиров - вершинам базовых полигонов и измеренным радиолокатором навигационным параметрам, при этом всю последовательность действий повторяют после каждого оборота антенны радиолокатора, причем по серии обсерваций предвычисляют следующее счислимое место и его среднеквадратическую погрешность, а также - поправку курсоуказателя. Параметры внутренней геометрии полигонов включают длины сторон, углы в вершинах, периметр или площадь, отношение максимальной стороны к минимальной.
Осуществление изобретения возможно путем реализации способа в следующих системах и устройствах:
- реализации способа в программном обеспечении навигационных радиолокаторов, имеющих функцию автоматического захвата и сопровождения точечных ориентиров, приема данных курсоуказателя, ГНСС, лага и загрузки данных каталога радиолокационных ориентиров;
- реализации способа в программном обеспечении электронных картографических навигационных информационных систем (ЭКНИС), интегрированных навигационных систем (ИНС), имеющих функции приема данных от системы автоматической радиолокационной прокладки (САРП), курсоуказателя, лага, ГНСС, загрузки и отображения электронных навигационных карт и каталога радиолокационных ориентиров;
- реализации способа в программном обеспечении отдельного навигационного процессора, принимающего данные от курсоуказателя, радиолокатора и других навигационных датчиков.
Для применения предлагаемого способа определяющим условием является наличие поля радиолокационных ориентиров, обеспечивающего непрерывное нахождение минимум 3-х ориентиров в зоне видимости радиолокатора. Радиолокационными ориентирами являются картированные «точечные» естественные объекты с высокой отражающей способностью, искусственные сооружения, радиолокационные пассивные отражатели или активные радиолокационные ответчики с известными координатами.
Пример конкретного осуществления способа.
Множество радиолокационных ориентиров m-А, В, С, D образуют совокупность треугольных полигонов ABC, ACD, ABD, DBC (фиг. 1), по координатам вершин которых рассчитываются параметры внутренней геометрии каждого полигона: длины сторон, углы в вершинах, периметр или площадь и отношение максимальной стороны к минимальной. Данные параметры зависят только от внутренней геометрии полигонов. Количество типов параметров, используемых в расчетах, обозначим "r".
С целью устойчивости способа к возможным расхождениям между составом каталога ориентиров и фактическим присутствием (наблюдением) ориентира на местности в момент обсервации (на фиг. 1 - не обнаруженная цель «b»), способ предусматривает построение всех возможных базовых минимальных (треугольных) полигонов с ориентирами в вершинах и, соответственно, всех возможных треугольных полигонов с наблюдаемыми целями в вершинах.
Наблюдаемые неподвижные точечные радиолокационные цели а, с, d, е, f, g, k…n имеют измеренные навигационные параметры (пеленг и расстояние) относительно искомого (фактического) места ТС Ра. Для последующих расчетов навигационные параметры целей принимаются измеренными из счислимого места Рс и преобразуются в прямоугольные координаты в системе координат, связанной со счислимым местом ТС.
Множество целей n включает как цели - отражения от известных (картированных) радиолокационных ориентиров, так и отражения от элементов местности и/или искусственных конструкций, координаты которых не известны и которые не могут служить ориентирами для автоматического определения места ТС (ложные цели). На фиг. 1 условная цель «b», соответствующая ориентиру В, не обнаружена (например - уровень помех не позволяет устойчиво сопровождать эту цель, либо - ориентир отсутствует, а каталог на момент обсервации не откорректирован).
Полученные точки в прямоугольной локальной системе координат образуют множество Cn3 треугольных полигонов: egk, egc, egd, egf, ega, gkc, gkd, gkf, gka, kcd, kcf, kca, cdf, cda…, где Cn3 - количество сочетаний n целей по 3. В общем случае, при отображении радиолокационного изображения на электронной карте, наблюдаемые цели будут смещены и развернуты относительно картированных радиолокационных ориентиров вследствие погрешностей счислимого места ТС и поправки курсоуказателя.
В каждом цикле обсерваций, с дискретностью, примерно соответствующей полному обороту антенны радиолокатора, для всех треугольных полигонов, образованных целями а, с, d, е, f, g, k, рассчитываются параметры внутренней геометрии каждого полигона: длины сторон, углы в вершинах, периметр или площадь, отношение максимальной стороны к минимальной. Данные параметры зависят только от внутренней геометрии полигонов, что позволяет провести сравнение базовых полигонов и полигонов, образованных наблюдаемыми целями.
Для каждого из базовых полигонов ABC, ACD, ABD, DBC выполняется автоматический поиск соответствующего ему полигона из множества полигонов egk, egc, egd, egf, ega, gkc, gkd, gkf, gka, kcd, kcf, kca, cdf, cda, …, удовлетворяющего условию:
Q=(Пij-Pik)2⇒min,
где:
Пij - значение i-го параметра внутренней геометрии базового полигона j;
Pik - значение i-го параметра внутренней геометрии полигона k, образованного наблюдаемыми неподвижными целями.
r - количество типов параметров внутренней геометрии полигона,
r=>i>=1 - тип параметра внутренней геометрии полигона (периметр, отношение сторон и т.п.);
m, n, - количество базовых полигонов и, соответственно, полигонов, образованных наблюдаемыми целями в текущей выборке;
m=>j>=1 - номер базового полигона в текущей выборке,
n=>k>=1 - номер полигона, образованного наблюдаемыми целями в текущей выборке.
В результате этого анализа в приведенном примере выбрали базовый полигон ACD, образованный радиолокационными ориентирами А, С и D с известными географическими координатами, и соответствующий ему полигон cda, образованный целями а, с и d, с измеренными навигационными параметрами относительно фактического места ТС. Далее устанавливается взаимное соответствие между вершинами этих полигонов.
На заключительном этапе вычисляются координаты транспортного средства по известным координатам опознанных радиолокационных ориентиров и их измеренным навигационным параметрам относительно ТС (дистанциям и пеленгам), а также - оцениваются систематические погрешности в измерениях расстояния и курсоуказании.
Таким образом, заявляемый способ позволяет автоматически определять местоположение транспортного средства по радиолокационным ориентирам дополнительно к ГНСС или вместо ГНСС в случае ее отказа или деградации, без использования радиолокационных сигнатур ориентиров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА ПО ТРЕМ РАССТОЯНИЯМ | 2007 |
|
RU2353947C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| УСТРОЙСТВО СОВМЕСТИМОСТИ ИНТЕРФЕЙСОВ | 2017 |
|
RU2663549C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2686453C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ КООРДИНАТНОЙ ИНФОРМАЦИИ ГНСС В ЦЕЛЯХ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2013 |
|
RU2601617C2 |
| Способ определения деформаций свайных опор трубопровода с использованием навигационных спутниковых систем | 2023 |
|
RU2821670C1 |
Изобретение относится к определению местоположения транспортного средства (ТС). Техническим результатом является надежная идентификация радиолокационных целей за счет исключения влияния погрешности счислимого места ТС и систематической ошибки курсоуказателя на результаты опознавания целей. Технический результат достигается за счет того, что в качестве анализируемых параметров базовых полигонов и полигонов, образованных наблюдаемыми неподвижными целями, используют только параметры внутренней геометрии полигонов, не связанные с географическим положением ориентиров: длины сторон, углы в вершинах, периметр или площадь, отношение максимальной стороны к минимальной. Способ определения местоположения ТС по радиолокационным ориентирам согласно изобретению не использует радиолокационные сигнатуры ориентиров, которые трудно поддерживать в актуальном состоянии для полей ориентиров значительной протяженности. Способ позволяет автоматически определять местоположение транспортного средства по радиолокационным ориентирам дополнительно к ГНСС или вместо ГНСС в случае ее отказа или деградации, без использования радиолокационных сигнатур ориентиров. 1 з.п. ф-лы, 2 ил.
1. Способ определения местоположения транспортного средства (ТС) по радиолокационным ориентирам, включающий прием данных счислимого места ТС, курсоуказателя, радиолокационных целей и их навигационных параметров от навигационного радиолокатора, выбор данных радиолокационных ориентиров из базы данных в зоне возможного обнаружения радиолокатором с учетом погрешности счислимого места ТС, опознавание ориентиров, вычисление координат местоположения транспортного средства и поправку курсоуказателя, отличающийся тем, что рассчитывают область видимости ориентиров как окружность с центром в точке счислимого места ТС и радиусом, равным выбранному диапазону радиолокатора, увеличенному на три среднеквадратические погрешности счислимого места ТС, затем рассчитывают зоны поиска целей как касательные по пеленгам и дистанциям к окружностям с радиусом, равным трем среднеквадратическим погрешностям счислимого места ТС, с центрами в точках с координатами радиолокационных ориентиров, а после приема данных о неподвижных точечных целях от радиолокатора выполняют автоматическое групповое опознавание радиолокационных целей, соответствующих выбранным радиолокационным ориентирам с известными географическими координатами путем нахождения соответствия между полигонами, образуемыми наблюдаемыми точечными неподвижными целями, и базовыми полигонами, вершинами которых являются радиолокационные ориентиры, для чего строят набор базовых треугольных полигонов, каждый из которых образован тремя радиолокационными ориентирами, вычисляют параметры внутренней геометрии полигонов, после чего, используя все наблюденные точечные неподвижные цели, аналогично строят набор треугольных наблюденных полигонов, образованных целями с измеренными навигационными параметрами относительно фактического места ТС, вычисляют параметры внутренней геометрии полигонов и далее для каждого базового полигона ищут соответствующий ему наблюденный полигон по критерию Q минимума квадрата разностей однотипных параметров внутренней геометрии полигона
Q=(Пij-Рik)2⇒min,
где:
Пij - значение i-го параметра внутренней геометрии базового полигона j;
Рik - значение i-го параметра внутренней геометрии полигона k, образованного наблюдаемыми неподвижными целями,
после чего устанавливают соответствие вершин базовых и выбранных наблюденных полигонов, отбраковывают ошибочные параметры и вычисляют координаты ТС по известным координатам ориентиров - вершинам базовых полигонов и измеренным радиолокатором навигационным параметрам, при этом всю последовательность действий повторяют после каждого оборота антенны радиолокатора, причем по серии обсерваций предвычисляют следующее счислимое место и его среднеквадратическую погрешность, а также - поправку курсоуказателя.
2. Способ по п. 1, отличающийся тем, что параметры внутренней геометрии полигонов включают длины сторон, углы в вершинах, периметр или площадь, отношение максимальной стороны к минимальной.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2580332C1 |
| RU 2015153225 A, 16.06.2017 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2445576C1 |
| ВСПОМОГАТЕЛЬНОЕ ПОСАДОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2184993C2 |
| WO 2015043579 A1, 02.04.2015 | |||
| US 2010188280 A1, 29.07.2010. | |||

