Изобретения относятся к подземным хранилищам газа (ПХГ) и могут применяться для определения формы и размеров каверн ПХГ, создаваемых, например, в отложениях каменной соли.
Известны способы того же назначения, заключающиеся в измерении скорости звука С в соленой жидкой среде каверны и облучении ультразвуковыми импульсами стенок каверны звуколокатором под различными азимутальными углами α и наклонными к горизонту углами β на различной высоте h, последующем приеме ультразвуковых импульсов тем же звуколокатором и измерении времени t прохождения импульсами расстояний  от звуколокатора до стенок каверны, по которым определяют форму и размеры каверны /Патент Франции №2723783, кл. G01C 7/06, G01D 11/02, Е21В 47/00, G05D 3/12, 1996, Патент США №5767401, кл. 33/312 (Е21В 47/00), 1997/.
от звуколокатора до стенок каверны, по которым определяют форму и размеры каверны /Патент Франции №2723783, кл. G01C 7/06, G01D 11/02, Е21В 47/00, G05D 3/12, 1996, Патент США №5767401, кл. 33/312 (Е21В 47/00), 1997/.
Последний из известных способов принят за прототип предлагаемого способа.
Известны звуколокаторы для реализации способа, содержащие цилиндрический корпус, состоящий из трех последовательно установленных частей, причем центральная часть выполнена с возможностью азимутального перемещения относительно неподвижной левой части, а правая часть - с возможностью поворота относительно центральной части на угол 0÷90°, при этом в корпусе установлены блок обработки информации с генератором ультразвуковых импульсов, а также узлы контроля величин азимутального угла α и угла β наклона правой части относительно центральной, а также высоты h положения звуколокатора, выходы которого подключены к блоку обработки, причем на боковой поверхности поворотной правой части корпуса установлены первый основной приемно-передающий ультразвуковой преобразователь, соединенный с генератором ультразвуковых импульсов и входом блока обработки, а на торцевой свободной части корпуса установлен донный приемопередающий преобразователь, соединенный с генератором ультразвуковых импульсов и блоком обработки информации /Патент Франции №2723783, кл. G01C 7/06, G01D 11/02, Е21В 47/00, G05D 3/12, 1996; Патент США №5767401, кл. 33/312 (Е21В 47/00), 1997/.
Последний из патентов принят за прототип звуколокатора.
Недостатками прототипов способа и звуколокатора являются погрешности определения формы и размеров каверны ПХГ с помощью звуколокатора из-за наличия стратификации по глубине соленой жидкости, заполняющей каверну, и связанные с этим изменения скорости звука по глубине каверны.
Измерения усложняются тем, что скорость звука при наклонном лоцировании каверны (при β≠0), изменяется по направлению лоцирования.
Известный локатор имеет дополнительный недостаток, связанный с тем, что приемно-передающий ультразвуковой преобразователь расположен на поворотной части корпуса звуколокатора только с одной боковой стороны. Это позволяет звуколокатору пролоцировать за один каротажный проход при наклонном лоцировании только верхнюю или нижнюю части каверны. Если необходима информация о верхней и нижней частях каверны при наклонных лоцированиях, то требуется замена наклонной части корпуса на другую часть с расположением ультразвуковых преобразователей, смещенных на 180° от предыдущих, и требуется проведение повторного каротажа.
Техническим результатом, получаемым от внедрения изобретений, является устранение перечисленных недостатков способа и звуколокатора, т.е. повышение достоверности исследований за счет измерения скорости звука в процессе лоцирования и сокращения времени проведения каротажных работ.
Данный технический результат в части способа достигается за счет того, что в известном способе определения формы и размеров каверны подземных хранилищ газа, создаваемых в отложениях каменной соли, заключающемся в измерении скорости С звука в соленой жидкой среде каверны и облучении ультразвуковыми импульсами стенок каверны звуколокатором под различными азимутальными α и наклонными к горизонту углами β на различной высоте h, последующем приеме ультразвуковых импульсов тем же звуколокатором и измерении времен t прохождения импульсами расстояний  от звуколокатора до стенок каверны, по которым определяют форму и размеры каверны, скорости C1, С2…CN звука в соленой жидкой среде измеряют непосредственно в моменты измерений времен t1, t2…tN в горизонтальных плоскостях при различных значениях h и α, а затем перед измерениями времен t для наклонных к горизонту плоскостей аналитически определяют средние скорости Сβ для каждого наклонного к горизонту плоскостей направления под углом β при различных значениях азимутальных углов α и высот h.
от звуколокатора до стенок каверны, по которым определяют форму и размеры каверны, скорости C1, С2…CN звука в соленой жидкой среде измеряют непосредственно в моменты измерений времен t1, t2…tN в горизонтальных плоскостях при различных значениях h и α, а затем перед измерениями времен t для наклонных к горизонту плоскостей аналитически определяют средние скорости Сβ для каждого наклонного к горизонту плоскостей направления под углом β при различных значениях азимутальных углов α и высот h.
Данный технический результат в части звуколокатора достигается тем, что известный звуколокатор для реализации способа, содержащий узел контроля высоты h положения звуколокатора и цилиндрический корпус, состоящий из трех последовательно установленных частей, причем центральная часть выполнена с возможностью азимутального перемещения относительно неподвижной левой части, а правая часть - с возможностью поворота относительно центральной части на угол 0÷90°, при этом в корпусе установлены блок обработки информации с генератором ультразвуковых импульсов, а также узлы контроля величин азимутального угла α и угла β, выходы которых подключены к блоку обработки, причем на боковой поверхности поворотной правой части корпуса установлены первый основной приемно-передающий ультразвуковой преобразователь, соединенный с генератором ультразвуковых импульсов и с входом блока обработки, а на торцевой свободной части корпуса установлен донный приемно-передающий преобразователь, соединенный с генератором ультразвуковых импульсов и блоком обработки информации, содержит пару передающего и приемного преобразователей, установленных на известном расстоянии друг от друга по высоте на уровне основного приемно-передающего преобразователя, и второй основной приемно-передающий ультразвуковой преобразователь, установленный на боковой поверхности поворотной правой части корпуса напротив первого основного преобразователя и электрически соединенный с блоком обработки информации и генератором ультразвуковых импульсов.
Звуколокатор дополнительно содержит датчики температуры и давления, расположенные внутри корпуса.
В звуколокаторе узел контроля величины азимутального угла α и поворотного угла β выполнен на основе трехосевого магнитометра и акселерометра.
Изобретения поясняются чертежами.
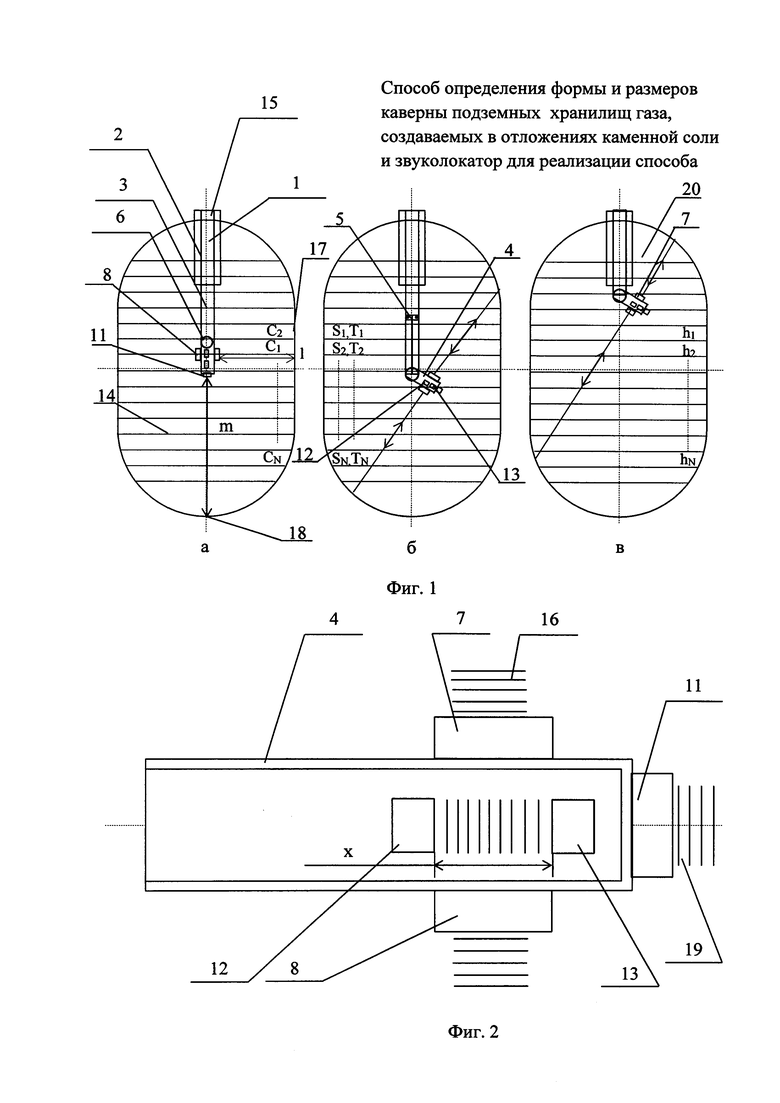
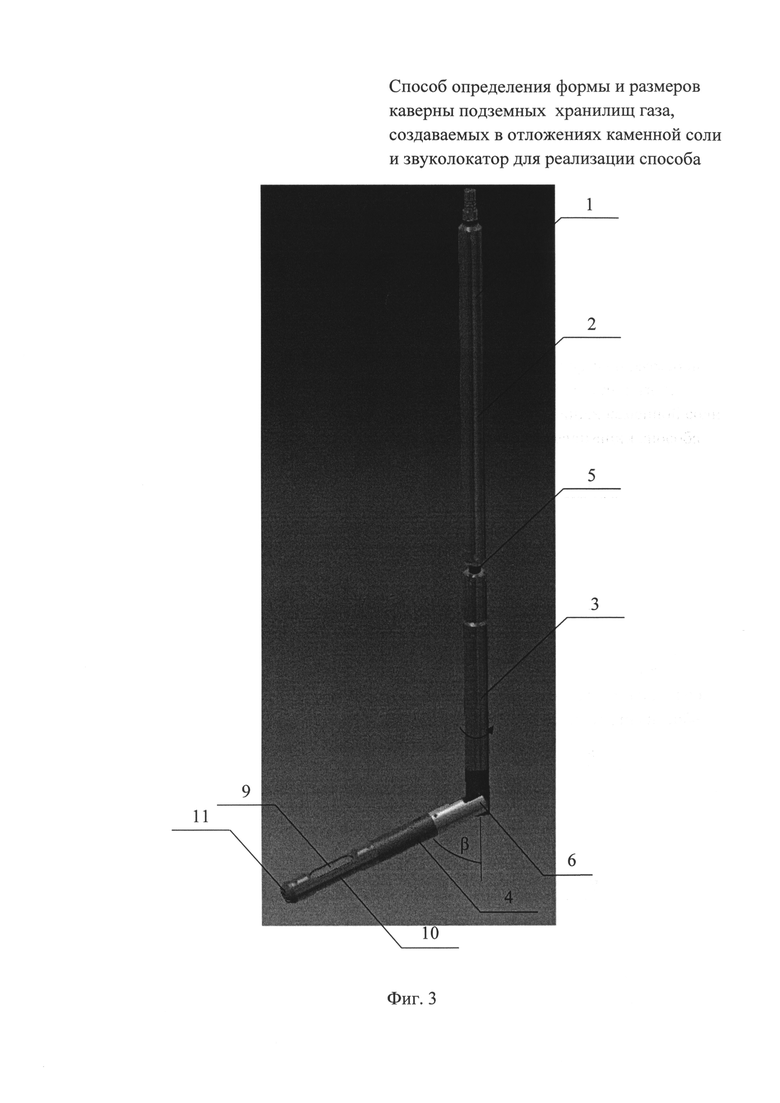
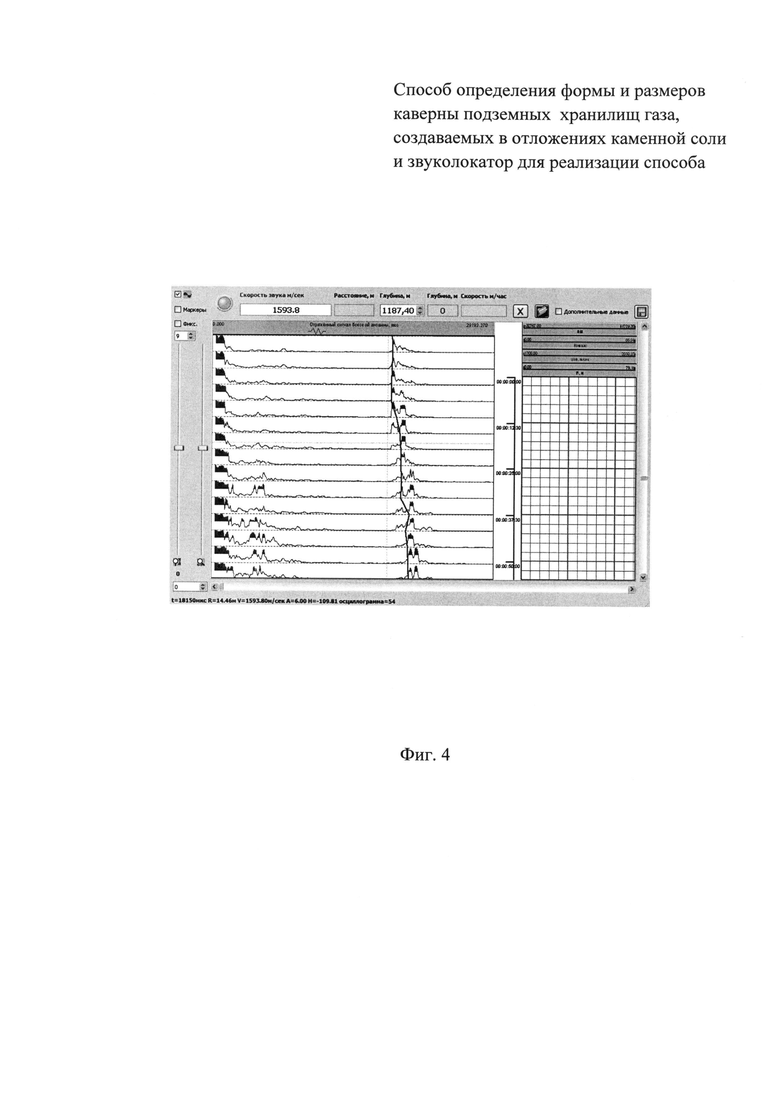
На фиг. 1 представлена схема реализации способа; на фиг. 2 - поворотная часть звуколокатора с ультразвуковыми преобразователями; на фиг. 3 - общий вид звуколокатора; на фиг. 4 - временные диаграммы, получаемые с помощью звуколокатора на различной глубине каверны ПХГ.
Звуколокатор (фиг. 1, 2, 3) для реализации способа содержит цилиндрический корпус 1, состоящий из трех последовательно установленных частей: левой, центральной и правой (звуколокатор в формуле изобретения описан в горизонтальном положении, в статике).
Левая часть 2 - неподвижная, центральная 3 - вращающаяся в азимутальной плоскости; правая 4 - поворотная по зенитному углу β=0÷90°.
Центральная часть 3 приводится во вращение вокруг оси 5 управляемым двигателем (на чертежах не показан), расположенным в цилиндрическом корпусе 1.
Правая часть 4 поворачивается вокруг цилиндрического шарнира 6 с помощью управляемого двигателя (на чертежах не показан), установленного в корпусе 1.
В корпусе 1, как в прототипе, установлены узлы контроля величин углов α и β. Узлы контроля могут быть выполнены на основе трехосного магнитометра и акселерометра, выходы которых подключены к блоку обработки (на чертежах не показаны).
Поворотная правая часть 4 корпуса 1 (фиг. 1, 2) содержит два приемно-передающих ультразвуковых преобразователя (оцифрованные под позициями 7, 8).
В боковой поверхности поворотной части 4 могут быть выполнены окна 9, 10 (фиг. 3) через которые ведутся излучение и прием ультразвуковых импульсов при работе звуколокатора.
Преобразователи 7, 8 установлены на поворотной части 4 под углом 180°.
Имеется также приемно-передающий донный ультразвуковой преобразователь 11, установленный на торцевой части корпуса 1 (поворотной части 4).
Внутри или снаружи поворотной части 4 корпуса 1 расположены пара передающего и приемного преобразователей 12, 13, закрепленных на известном расстоянии х друг от друга напротив преобразователей 7, 8 (фиг. 2), учитывая, что х<<h.
Все приемно-передающие ультразвуковые преобразователи 7, 8, 12, 13 подключены к генератору ультразвуковых импульсов и к блоку обработки информации (генератор и блок обработки на чертежах не показаны).
Звуколокатор также содержит измеритель глубины h расположения звуколокатора в каверне 14 (фиг. 1) и датчики температуры TN, давления и солености SN жидкости, заполняющей каверну 14 ПХГ (на чертежах не показаны). Датчик солености SN жидкости может быть выполнен в виде датчика электропроводности и служит для определения закона стратификации соленой жидкости по высоте h.
Способ реализуется следующим образом.
Звуколокатор опускается в исследуемую каверну 14 ПХГ через скважину 15 при угле β=180° (фиг. 1а).
Включаются приемно-передающие ультразвуковой преобразователь с одной стороны цилиндрического корпуса 1 (например 7) и пара ультразвуковых преобразователей 12, 13 с донным приемно-передающим преобразователем 11 (фиг. 1а).
На каждом уровне на высотах h1, h2…hN (фиг. 1в) измеряются времена t1, t2…tN прохождения ультразвуковой волной 16 двойного расстояния ll, l2…lN от преобразователя 7 до стенки 17 каверны и обратно до преобразователя 7 (фиг. 1, 2).
Одновременно на уровнях h1, h2…hN измеряются скорости звука C1, С2…CN с помощью пары преобразователей 12, 13, расположенных на расстоянии х в подвижной части 4 корпуса 1.
Блок обработки информации определяет расстояние  для различных азимутальных углов α и высот h.
для различных азимутальных углов α и высот h.
С помощью приемно-передающего преобразователя 11, излучающего и принимающего отраженный от дна 18 каверны 17 ультразвуковой импульс 19, контролируется расстояние от торца звуколокатора до дна 18 каверны 17 (фиг. 1, 2).
Измеренные значения времен t1, t2…tN для различных высот h1, h2…hN, регистрируются (фиг. 4) и заполняются в блоке обработки.
При достижении заданного расстояния до дна 18 каверны 17 звуколокатор останавливается для отклонения поворотной части 4 в пределах угла β и лоцирования донной области каверны, например, с помощью преобразователя 8 (фиг. 1, 2).
Одновременно с донной областью (или последовательно) с помощью преобразователей 7, 8 можно проводить лоцирование боковых стенок каверны 17 под различными углами α и β (фиг. 1б).
При этом для каждого наклонного к горизонту направления β определяют средние скорости Сβ по ранее полученным значениям C1, С2…CN скоростей звука для различных h. И по измеренному времени распространения ультразвукового импульса определяют наклонное расстояние до стенки каверны.
Купольную часть 20 каверны 17 (фиг. 1в) аналогично исследуют с помощью преобразователя 7, во время проведения тех же каротажных исследований в отличие от прототипа, в котором для подобных исследований требуется замена поворотной части 4 звуколокатора и проведение повторного каротажа ПХГ.
Таким образом, применение данных способа и звуколокатора повышает достоверность исследований формы и размеров каверны ПХГ за счет определения скорости звука в различных направлениях при проведении акустических измерений в процессе одного каротажного исследования, чем достигается поставленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ исследования геометрических параметров каверны подземного хранилища газа | 2017 |
|
RU2660307C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| Измерительная система для учета газа | 2023 |
|
RU2829478C1 |
| Скважинный звуколокатор | 1976 |
|
SU693305A1 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР-СЧЕТЧИК ОБЪЕМНОГО РАСХОДА И ОБЪЕМА ПОТОКОВ ТЕКУЧИХ СРЕД | 2024 |
|
RU2825979C2 |
| Скважинный гидролокатор | 1990 |
|
SU1796014A3 |
| МНОГОЧАСТОТНЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2017 |
|
RU2689998C1 |
Изобретения относятся к метрологии, в частности к средствам контроля формы и размеров подземных хранилищ газа. Звуколокатор содержит узел контроля высоты h положения звуколокатора и цилиндрический корпус, состоящий из трех последовательно установленных частей. Центральная часть выполнена с возможностью азимутального перемещения относительно неподвижной левой части, а правая часть - с возможностью поворота относительно центральной части на угол 0÷90°. В корпусе установлены блок обработки информации с генератором ультразвуковых импульсов, а также узлы контроля величин азимутального угла α и угла β наклона правой части относительно центральной. На боковой поверхности поворотной правой части корпуса установлен первый основной приемно-передающий ультразвуковой преобразователь, а на торцевой свободной части корпуса установлен донный приемно-передающий преобразователь. Также содержит пару передающего и приемного преобразователей, установленных на уровне основного приемно-передающего преобразователя, и второй основной приемно-передающий ультразвуковой преобразователь, установленный на боковой поверхности поворотной правой части корпуса напротив первого основного приемно-передающего преобразователя. Технический результат – повышение точности измерений. 2 н. и 2 з.п. ф-лы, 4 ил.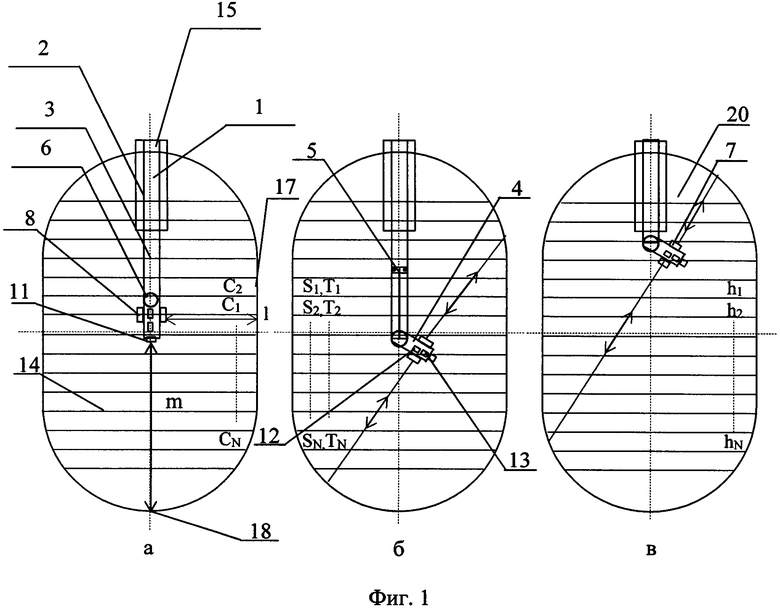
1. Способ определения формы и размеров каверны подземных хранилищ газа, создаваемых в отложениях каменной соли, заключающийся в измерении скорости С звука в соленой жидкой среде каверны и облучении ультразвуковыми импульсами стенок каверны звуколокатором под различными азимутальными углами α и наклонными к горизонту углами β на различной высоте h, последующем приеме ультразвуковых импульсов тем же звуколокатором и измерении времен t прохождения импульсами расстояний  от звуколокатора до стенок каверны, по которым определяют форму и размеры каверны, отличающийся тем, что скорости C1, C2 … CN звука в соленой жидкой среде измеряют непосредственно в моменты измерений времен t1, t2 … tN в горизонтальных плоскостях при различных значениях h и α, а затем перед измерениями времен t для наклонных к горизонту плоскостей аналитически определяют средние скорости Сβ для каждого наклонного к горизонту направления под углом β при различных значениях азимутальных углов α и высот h.
от звуколокатора до стенок каверны, по которым определяют форму и размеры каверны, отличающийся тем, что скорости C1, C2 … CN звука в соленой жидкой среде измеряют непосредственно в моменты измерений времен t1, t2 … tN в горизонтальных плоскостях при различных значениях h и α, а затем перед измерениями времен t для наклонных к горизонту плоскостей аналитически определяют средние скорости Сβ для каждого наклонного к горизонту направления под углом β при различных значениях азимутальных углов α и высот h.
2. Звуколокатор для реализации способа, содержащий узел контроля высоты h положения звуколокатора и цилиндрический корпус, состоящий из трех последовательно установленных частей, причем центральная часть выполнена с возможностью азимутального перемещения относительно неподвижной левой части, а правая часть - с возможностью поворота относительно центральной части на угол 0÷90°, при этом в корпусе установлены блок обработки информации с генератором ультразвуковых импульсов, а также узлы контроля величин азимутального угла α и угла β наклона правой части относительно центральной, выходы которых подключены к блоку обработки, причем на боковой поверхности поворотной правой части корпуса установлен первый основной приемно-передающий ультразвуковой преобразователь, соединенный с генератором ультразвуковых импульсов и входом блока обработки, а на торцевой свободной части корпуса установлен донный приемно-передающий преобразователь, соединенный с генератором ультразвуковых импульсов и блоком обработки информации, отличающийся тем, что содержит пару передающего и приемного преобразователей, установленных на известном расстоянии друг от друга по высоте на уровне основного приемно-передающего преобразователя, и второй основной приемно-передающий ультразвуковой преобразователь, установленный на боковой поверхности поворотной правой части корпуса напротив первого основного приемно-передающего преобразователя, электрически соединенный с блоком обработки информации и генератором ультразвуковых импульсов.
3. Звуколокатор по п. 2, отличающийся тем, что дополнительно содержит датчики температуры и давления, расположенные внутри корпуса.
4. Звуколокатор по п. 2, отличающийся тем, что узлы контроля величины азимутального угла α и поворотного угла β выполнен на основе трехосевого магнитометра и акселерометра.
| US 5767401 A, 16.06.1998 | |||
| 0 |
|
SU234685A1 | |
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |
| Способ акустической профилеметрии скважин | 1980 |
|
SU987548A1 |
| Скважинный гидролокатор | 1990 |
|
SU1796014A3 |
| Способ акустической локации стенок скважины | 1991 |
|
SU1824610A1 |
| Ультразвуковой скважинный гидролокатор | 1977 |
|
SU720389A1 |
| Способ получения коричневых красителей акридинового ряда | 1926 |
|
SU31074A1 |
| US 4766577 A1, 23.08.1988 | |||
| US 8408355 B2, 02.04.2013 | |||
| US 3286163 A1, 15.11.1966 | |||
| US 3517768 A, 30.06.1970 | |||
| US 4381787 A1, 03.05.1983. | |||

