Изобретение относится к способу контроля за степенью наполнения грейфера сыпучим материалом.
Известно, что грейферы используют для погрузки-выгрузки сыпучих материалов, таких как руда, уголь, гравий или песок. У грейферов, которых иначе называют самосхватами, размеры, форму и количество челюстей выбирают в зависимости от вида сыпучего материала. Этим стараются добиться максимального погружения челюстей в сыпучий материал для более эффективной загрузки грейфера и повышения эффективности его работы. Обычно грейферы с разомкнутыми челюстями поднимают над кучей сыпучего материала и дают обрушиться на последний, чтобы челюсти под собственной тяжестью погрузились в сыпучий материал. Затем за счет смыкания челюстей заполняют грейфер сыпучим материалом. Челюсти грейфера смыкают либо с помощью гидравлического привода либо действием канатов.
Из патента Германии №19955750 известен грейфер для погрузки-выгрузки сыпучего материала. Это так называемый четырехкабельный грейфер. У него два поддерживающих и два замыкающих каната, которые можно приводить в действие независимо друг от друга. С их помощью грейфер можно открыть, закрыть, поднять, опустить. Для приведения канатов в действие имеются два барабана: один для поддерживающих канатов, другой - для замыкающих. Для размыкания челюстей грейфера натяжение замыкающих канатов ослабляют и грейфер висит только на поддерживающих канатах. Поддерживающие канаты воздействуют на рычажный механизм, и вместе с силой тяжести грейфера способствуют открыванию последнего. Для захвата сыпучего материала открытый грейфер при ослабленных замыкающих канатах опускают на поддерживающих канатах над кучей сыпучего материала, а затем резко ослабляют поддерживающие канаты и под тяжестью своей массы раскрытый грейфер падает на сыпучий материал. Путем натяжения замыкающих канатов челюсти грейфера смыкают, захватывая порцию материала. Одновременно натягивают поддерживающие канаты. Силу натяжения обеих пар канатов регулируют соответствующими регуляторами, уравнивая между собой, благодаря чему грейфер поднимают и перемещают всеми четырьмя канатами совместно.
Как правило, данные о плотности и массе сыпучего материала, объеме и массе грейфера не вводят в устройство управления грузовым краном, на котором подвешен грейфер. Из-за экстремальных условий эксплуатация грейфера уровень наполняемости грейфера сыпучим материалом определяют косвенным путем по эмпирическим величинам, т.е. приблизительно, условно.
Способ предотвращения перегрузки грейфера, приводимого в действие поддерживающими и замыкающими канатами, известен из патента ГДР 288138. Согласно способу, во время смыкания челюстей грейфера измеряют силу растяжения в замыкающих и поддерживающих канатах и разницу сравнивают с заданным значением для замыкающих канатов. Если разница превышает заданное значение, управляющий сигнал приводит в действие мотор барабана, на который намотаны поддерживающие канаты, и грейфер поднимают при не сомкнутых до конца челюстях, которые смыкают уже в воздухе. При этом некоторое количество сыпучего материала высыпается из грейфера, облегчая последний.
Из европейского патента №0458994 известны средства управления силой натяжения поддерживающих и замыкающих канатов грейфера для сыпучих материалов. Эти средства имеют возможность управлять отдельно силой натяжения поддерживающих канатов во избежание рывков при ослаблении последних при смыкании челюстей грейфера. Однако при этом не происходит уменьшение массы груза, поскольку грейфер можно поднять только после полного смыкания челюстей. Так что, указанные средства управления силами натяжения канатов в данном случае не регулируют степень наполнения грейфера сыпучим материалом.
В патенте ГДР №244962 описан способ управления процессом захвата материала грейфером с целью автоматизации работы последнего. При этом управляют величиной угла раскрытия челюстей грейфера и временем смыкания челюстей грейфера, лежащего на куче сыпучего материала. Если грейфер не может быть закрыт до определенной величины за определенное время, то процесс закрывания грейфера прерывают и приводят в действие подъемный механизм и поднимают грейфер, снимая его с сыпучего материала. После этого процесс закрывания грейфера возобновляют с одновременным контролем этого процесса.
Из европейского патента №2.226.287 известен способ наполнения грейфера, висящего на поддерживающих канатах, при котором объем заполнения грейфера регулируют таким образом, что при смыкании челюстей грейфера кривая силы закрывания грейфера возрастает.
Задачей изобретения является создание способа оптимального наполнения грейфера сыпучим материалом в процессе погрузки-выгрузки его подъемным краном путем регулирования силы натяжения канатов в процессе закрывания грейфера с захватом сыпучего материала, в который он был погружен при свободном падении с вершины стрелы подъемного крана под действием собственной тяжести.
Поставленную задачу решают способом, описанным в п. 1 формулы изобретения. Предпочтительные варианты изобретения и использование изобретения описаны в зависимых пунктах формулы.
Согласно изобретению в способе управления наполнением сыпучим материалом грейфера, закрепленного на поддерживающих канатах, на которых его поднимает и опускает подъемный кран с использованием задатчика управляющих сигналов, при этом грейфер заглубляют в сыпучий материал под действием силы его тяжести, при закрывании и наполнении грейфера, при котором степень наполнения грейфера корректируют с помощью задатчика, подающего контрольные сигналы на средства изменения силы натяжения поддерживающих канатов, для чего
задатчиком устанавливают ЗАДАННУЮ величину (Fsoll) силы натяжения поддерживающих канатов, посылают из задатчика соответствующую переменную на вход регулятора силы натяжения канатов, который управляет электродвигателем для поднятия и опускания грейфера, при этом на вход регулятора силы натяжения канатов посылают второй сигнал уточненной ФАКТИЧЕСКОЙ величины (Fist) силы натяжения поддерживающих канатов.
Благодаря этому избегают блокировок работы подъемного крана из-за перегрузок грейфера.
Данное изобретение обеспечивает управление степенью наполнения грейфера сыпучим материалом. Это достигается за счет того, что при работе подъемного крана с грейфером благодаря изобретению удается избежать частых блокировок подъемного крана, вызванных перегрузками грейфера и тем самым повысить производительность подъемного крана. Указанные блокировки происходят потому, что грейфер свободно падает с высоты конца стрелы подъемного крана под собственной тяжестью и очень глубоко погружается в сыпучий материал. Затем его закрывают натяжением замыкающих канатов и при этом грейфер может забрать в себя слишком много груза. И если он забирает больше материала, чем кран может поднять, срабатывает блокиратор. Если же при этом кран имеет большой рабочий радиус (большой вылет стрелы), то величина максимально допустимой нагрузки на кран дополнительно снижена и перегрузки случаются еще чаще. Если же объем грейфера занижен относительно мощности подъемного крана, то перегрузка крана может случиться только при большом рабочем радиусе. Но при этом производительность подъемного крана тоже невысока. Благодаря оптимизации соотношения «грузоподъемность крана/объем наполнения грейфера сыпучим материалом», достигаемой благодаря данному изобретению, подъемный кран может работать в режиме максимально допустимой нагрузки при любом рабочем радиусе. Свободно падающий на кучу сыпучего материала грейфер с разведенными челюстями имеет тенденцию захватывать больше груза при закрывании его челюстей, чем позволяют возможности подъемного крана. Поэтому изобретение направлено на уменьшение роли массы грейфера в процессе его наполнения сыпучим материалом. Изобретение позволяет использовать большие грейферы и работать с сыпучим материалом с высокой удельной плотностью, потому что наполнение грейфера будет оптимальным. Меняя силу натяжения поддерживающих канатов, благодаря данному изобретению, можно как уменьшить заглубление грейфера в сыпучий материл при падении на него, так и отрегулировать количество сыпучего материала, захватываемого челюстями грейфера при их смыкании.
На практике задатчик по изобретению можно использовать для уменьшения количества блокировок из-за перегрузки на 90%, что повышает производительность подъемного крана.
Рабочая нагрузка в терминах настоящего изобретения складывается из массы грейфера, массы наполнившего грейфер сыпучего материала и, в случае использования канатов для управления грейфера, массы канатов на отрезке от вершины стрелы подъемного крана до грейфера.
В предпочтительном варианте предусмотрено, что время изменения ЗАДАННОЙ величины натяжения поддерживающих канатов и величину приращения изменения этой ЗАДАННОЙ величины подают в задатчик через модуль определения тенденции со ссылкой на прогрессии уточненных рабочих нагрузок. При наличии модуля определения тенденций, хранящиеся в нем данные, такие как, например, погрузка сопоставимых сыпучих материалов с использованием такого же грейфера и достигаемые при этом величины наполнения грейфера, позволят быстрее оптимизировать величину наполнения грейфера уже в данном случае и более надежно защитить подъемный кран от перегрузок. Изменения ЗАДАННОЙ величины силы натяжения канатов при закрывании грейфера позволяют силам натяжения оперативно подстроиться под процесс, описанный кривой рабочей нагрузки, на полной длине рабочего радиуса при избежании блокировок подъемного крана из-за перегрузок или минимизации их количества.
В другом предпочтительном варианте ЗАДАННУЮ величину силы натяжения канатов увеличивают в соответствии с тенденцией, выявленной модулем, в случае, когда частота блокировок работы подъемного крана из-за перегрузки превышает заданное число относительно числа циклов наполнения грейфера и/или когда частота превышений при этом максимально допустимой нагрузки больше заданной для данного рабочего радиуса.
Еще в одном варианте изобретения ЗАДАННУЮ величину силы натяжения уменьшают в соответствии с тенденцией, выявленной модулем, в случае, когда частота блокировок работы подъемного крана из-за перегрузки меньше заданного числа относительно числа циклов наполнения грейфера (2) и/или когда частота превышений максимально допустимой нагрузки меньше заданной для данного рабочего радиуса.
В другом частном варианте предусмотрено, что при корректировке процесса закрывания грейфера и наполнения его сыпучим материалом в задатчике используют и ФАКТИЧЕСКУЮ величину силы натяжения канатов, действующую по направлению подъема грейфера подъемным краном.
Во избежание перегрузок подъемного крана также предусмотрено, что задатчик задает степень наполнения грейфера, исходя из рабочей нагрузки, уточненной после подъема наполненного грейфера при известной массе пустого грейфера.
Степень наполнения грейфера более точно можно определить, если длину отрезка свисающего каната, начинающегося от грейфера и тянущегося до вершины стрелы подъемного крана, через модуль данных о длине каната ввести в задатчик, который при этом учитывает массу канатов на указанном отрезке вместе с массой пустого грейфера в процессе вычисления степени наполнения грейфера.
Обычно подъемные краны, работающие с сыпучими материалами, снабжены поворотной стрелой, поэтому рабочий радиус подъемного крана и/или грейфера изменяется в процессе работы. Для учета этого фактора предусмотрено, что из модуля кривой рабочей нагрузки в задатчик вводят данные о максимально допустимой нагрузке для подъемного крана при данной величине рабочего радиуса грейфера. Вследствие этого задатчик постоянно имеет данные о максимально возможной нагрузке, с учетом которой и определяет степень наполнения грейфера в данной операции.
Также предпочтительнее, если ЗАДАННУЮ величину силы натяжения канатов в качестве исходной переменной вручную вводят в задатчик через модуль исходных данных. В частности это делают после замены грейфера на другой или при начале работы с новым сыпучим материалом, имеющим иную удельную плотность, что помогает задатчику быстрее задать оптимальный режим наполнения грейфера.
Еще в одном предпочтительном варианте воплощения изобретения в задатчике ЗАДАННУЮ величину натяжения поддерживающих канатов многократно уменьшают или увеличивают, используя входные данные от модуля кривой рабочей нагрузки, модуля длины каната на отрезке от вершины стрелы до грейфера и данные об уточненной рабочей нагрузке до тех пор, пока степень наполнения грейфера сыпучим материалом не достигнет 100% максимально допустимой нагрузки.
Применение описанного выше способа по данному изобретению особенно предпочтительно для подъемного крана, содержащего грейфер, который может быть поднят на определенную высоту, опущен с нее, открыт и закрыт с помощью поддерживающих и замыкающих канатов.
Задатчик, наличие которого предусмотрено в данном способе, может представлять собой самостоятельный объект изобретения. А его применение предпочтительно в выше описанном способе по данному изобретению.
Далее изобретение пояснено более подробно со ссылками на иллюстративный материал, где:
на Фиг. 1 показан подъемный кран с грейфером для сыпучего материала,
на Фиг. 2 изображена кривая рабочей нагрузки подъемного крана Фиг. 1,
на Фиг. 3 показан грейфер фигуры 1, и
на Фиг. 4 показана блок-схема системы оптимизации наполнения грейфера сыпучим материалом.
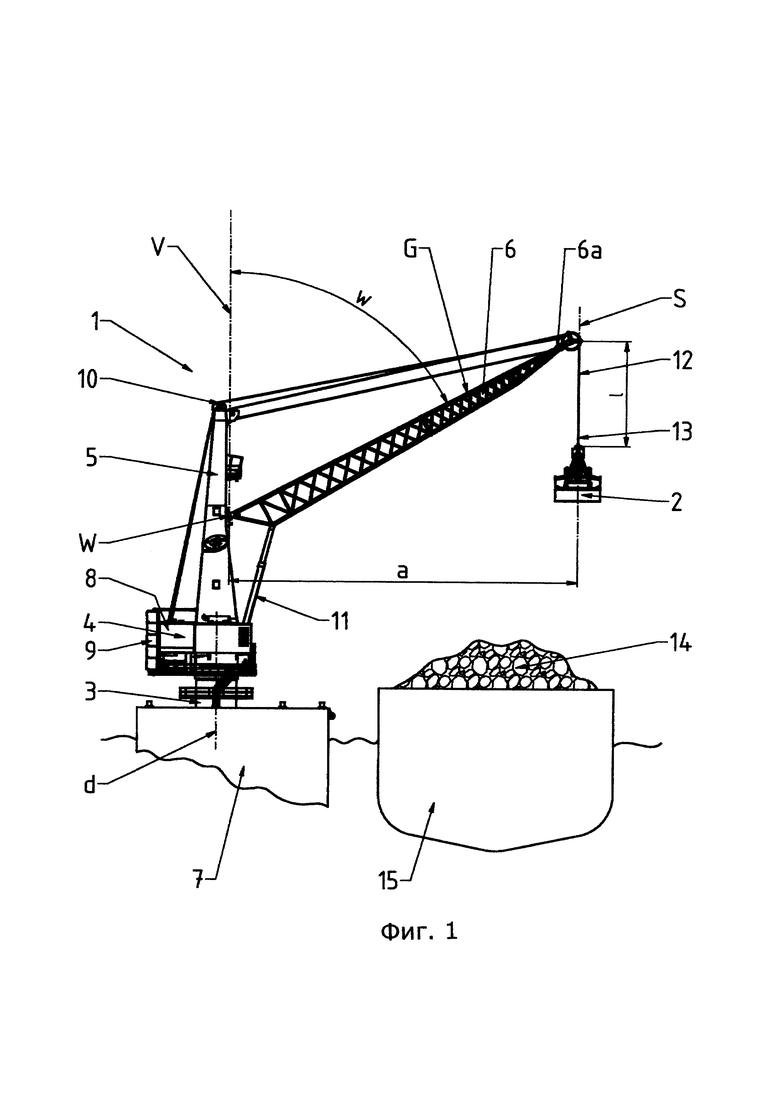
На Фиг. 1 показан подъемный кран 1 для погрузки-выгрузки сыпучих материалов 14, таких как руда, уголь, зерно, гравий или песок с пирса на сухогрузы и наоборот, или с места на место на пирсе. Подъемный кран 1 несет грейфер 2 и установлен на круглом основании 3, по которому перемещается платформа 4, несущая башню 5 со стрелой 6. Основание 3 неподвижно закреплено на понтоне 7. Но оно может быть установлено и на пирсе с возможностью перемещения по нему на колесах с шинами или по рельсам. Платформа 4 установлена на основании 3 с возможностью поворота вокруг своей вертикальной оси d под действием приводного механизма (не показан). Платформа 4 несет подъемный механизм 8, расположенный на той стороне, где установлен противовес 9. Кроме того, на платформе 4 установлена башня 5, возвышающаяся вертикально и снабженная на верхнем своем конце блоком шкивов 10. Приблизительно на середине высоты башни 5 к ее стороне, противоположной стороне с противовесом 9, прикреплена одним своим концом поворотная стрела 6, имеющая возможность поворота вокруг горизонтальной оси W. С помощью механизма 11, обычно выполняемого в виде гидравлического цилиндра, стрела 6 может быть наклонена под любым углом w, вплоть до вертикального. Стрела 6 выполнена в виде пространственной фермы решетчатой конструкции. На ее свободном конце 6а установлен другой блок шкивов, направляющих поддерживающие канаты 12 и замыкающие канаты 13, которые протянулись от подъемного механизма через блок шкивов 10 и шкивы на конце 6а стрелы 6 до соединения с грейфером 2.
Угол w изменения величины вылета стрелы образован между вертикальной линией V, проходящей через горизонтальную ось W, и прямой линией G, проходящей от верхней точки 6а стрелы 6 до горизонтальной оси W. Изменение угла w изменяет величину рабочего радиуса а подъемного крана 1, от которой зависит допустимая грузоподъемность крана 1. Рабочий радиус а соответствует расстоянию по горизонтали от вертикальной линии V до вертикальной линии S, проходящей через центр грейфера 2. Линия S совпадает с поддерживающими и замыкающими канатами 12, 13, свисающими с конца 6а стрелы 6. Длина отрезка канатов 12, 13 от верхней точки 6а стрелы 6 до точки соединения их с грейфером 2 обозначена буквой  .
.
Из Фиг. 1 также видно, что судно 16 (в частности лихтер, либо баржа, оснащенная или неоснащенная двигателем), загруженное сыпучим материалом 14, может быть разгружено или нагружено с помощью подъемного крана 1.
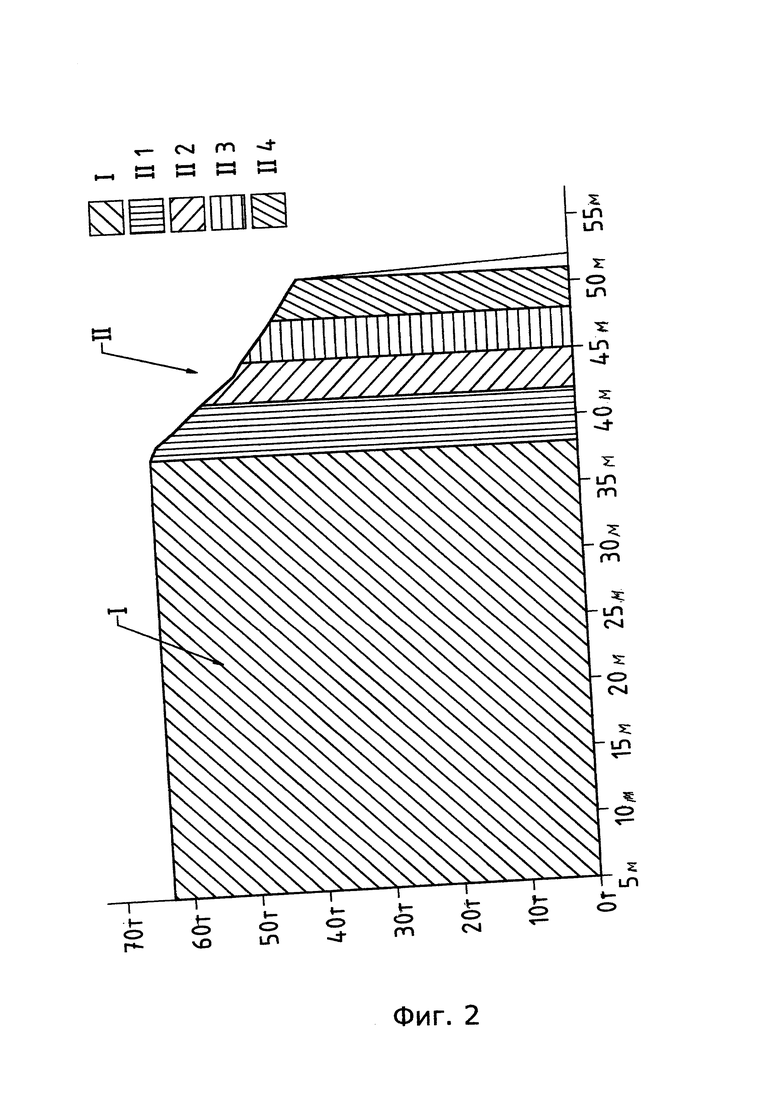
На Фиг. 2 показана так называемая кривая рабочей нагрузки подъемного крана 1. Кривая рабочей нагрузки показывает максимально допустимую нагрузку на подъемный кран 1 в тоннах в зависимости от величины рабочего радиуса а в метрах. В данном случае можно выделить, по крайней мере, два диапазона нагрузок: I и II. Если ориентироваться на размеры подъемного крана 1, то совсем не очевидно, что в диапазоне I при рабочем радиусе от 0 до приблизительно 38 метров максимально допустимая нагрузка, согласно данной кривой рабочей нагрузки, составляет около 63 тонн. При величине рабочего радиуса а от приблизительно 31 м до максимально возможных 51м максимально допустимая нагрузка постепенно уменьшается по мере увеличения рабочего радиуса а. Этот диапазон обозначен как второй диапазон нагрузок - II. Второй диапазон нагрузок, согласно изобретению, с помощью специального блока управления разделен на субдиапазоны: первый рабочий субдиапазон II1, второй рабочий субдиапазон II2, третий рабочий субдиапазон II3 и четвертый рабочий субдиапазон II4. На основе построенной кривой рабочей нагрузки видно, что при превышении максимально допустимой рабочей нагрузки приблизительно на 10% произойдет перегрузка подъемного крана 1.
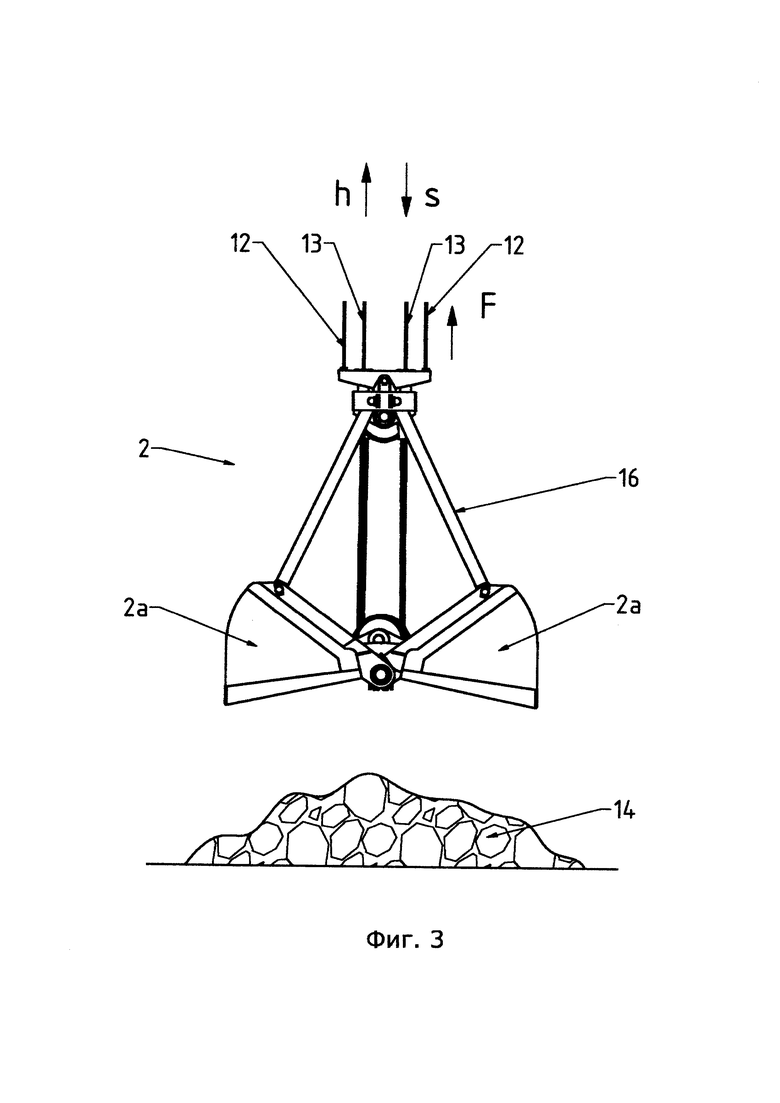
На Фиг. 3 показан грейфер 2 Фиг. 1. Грейфер 2 имеет две челюсти 2а и подвешен на четырех канатах: двух поддерживающих канатах 12 и двух замыкающих канатах 13. Указанные канаты намотаны на два отдельных барабана, установленных в подъемном механизме 8 (не показаны). Для раскрывания, закрывания, подъема и опускания грейфера 2 поддерживающая и замыкающая лебедки приводят указанные барабаны во вращение независимо друг от друга. Для открывания грейфера 2 ослабляют замыкающие канаты 13 и грейфер 2 оказывается подвешенным только на поддерживающих канатах 12, которые при этом воздействуют через рычажный механизм на тяги 16 и заставляют челюсти 2а разойтись в стороны, тем самым открывая грейфер 2. Для наполнения грейфера 2 сыпучим материалом 14 при ослабленных поддерживающих канатах 12 ослабляют и замыкающие канаты 13, вследствие чего грейфер 2 под своей тяжестью падает на груду сыпучего материала 14 и челюсти 2а погружаются в сыпучий материал 14 на какую-то величину. Затем натягивают замыкающие канаты 13, потянув их в направлении h, и тем самым смыкают челюсти 2а и закрывают грейфер 2. При этом челюсти 2а заглубляются в сыпучий материал 14 и захватывают порцию его, наполняя грейфер 2. Во время этого процесса захвата сыпучего материала 14 и наполнения им грейфера 2 регулятор 18 силы натяжения (см. Фиг. 4) поддерживающих канатов 12 управляет натяжением-ослаблением поддерживающих канатов 12. Поддерживающие канаты 12 тянут до тех пор, пока замыкающие канаты 13 не закроют грейфер 2, который при этом наполняется сыпучим материалом 14. После закрывания грейфера 2 последний поднимают замыкающими канатами 13. При этом параллельно тянут и поддерживающие канаты 12. Силой натяжения канатов 12, 13 управляет соответствующий регулятор, поэтому подъем грейфера канаты 12, 13 осуществляют вместе.
Если грейфер 2 захватил слишком много сыпучего материала 14, то может случиться так, что итоговая масса груза превысит максимально допустимую нагрузку для данного рабочего радиуса а. Итоговая масса груза складывается из массы захваченного сыпучего материала 14, массы самого грейфера 2 и массы поддерживающих и замыкающих канатов 12, 13 на отрезке . Если это произошло, то для защиты подъемного крана от опрокидывания дальнейший подъем груза блокирует ограничитель 20 крутящего момента (см. Фиг. 4). Итоговую массу груза можно определить, например, как FLast (последняя сила) с помощью тензометров, установленных на канатных барабанах подъемного механизма 8, сигналы от которых поступают на ограничитель 20 крутящего момента в виде входных переменных. Этот факт блокировки автоматически записывается в банк данных 21 подъемного крана 1. Как описано в преамбуле, блокировка барабана при перегрузке может происходить довольно часто во время работы подъемного крана, если рабочая загрузка грейфера 2 подъемного крана 1, плотность сыпучего материала, объем грейфера и его масса не скоординированы соответствующим образом, что часто случается при использовании грейфера большого объема без учета удельной массы сыпучего материала. Иначе говоря, выбор грейфера не всегда бывает оптимален.
Если грейфер 2 захватывает столько сыпучего материала 14, что итоговая масса груза не превышает максимально допустимую нагрузку, то данные о массе захваченного сыпучего материала, т.е. полезного груза, и об итоговой массе груза во время открывания грейфера 2 в заданном месте поступают в банк данных 21. Из итоговой массы груза вычитают массу самого грейфера 2 и массу канатов 12, 13 на отрезке , и определяют массу полезного груза, которую также фиксируют в банке данных 21.
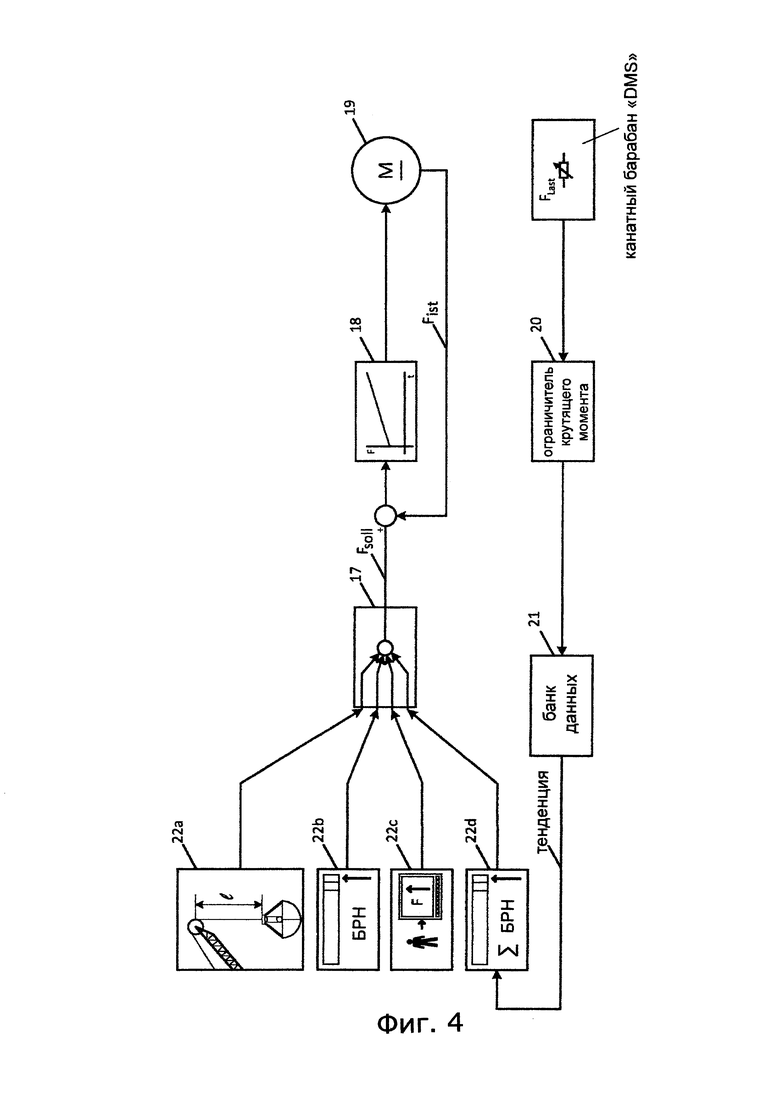
На Фиг. 4 схематически показан программируемый задатчик 17 с памятью, предназначенный для оптимизации степени наполнения грейфера 2 сыпучим материалом 14 по кривой рабочей нагрузки подъемного крана 1 и для исключения его перегрузки.
Задатчик 17 на выходе посылает в качестве контрольной переменной ЗАДАННУЮ величину Fsoll силы натяжения поддерживающих канатов 12. Этот параметр является входящей переменной для регулятора 18 силы натяжения канатов. По ЗАДАННОЙ величине Fsoll регулятор 18 силы натяжения канатов управляет электродвигателем 19, приводящим во вращение барабан (не показан), на который намотаны поддерживающие канаты 12. В качестве второй входящей переменной на вход регулятора 18 поступает ФАКТИЧЕСКАЯ величина Fist силы натяжения поддерживающих канатов 12. Ее определяют по текущим данным, получаемым от электродвигателя 19, в частности, по параметрам тока.
Модуль 22а, содержащий данные о длине канатов на отрезке , модуль 22b, в который загружены данные о кривой рабочей нагрузки, модуль 22с, хранящий исходные данные, и модуль 22d, вырабатывающий тенденции, т.е. варианты событий, к которым склоняется рабочая ситуация, посылают переменные на вход задатчика 17, который работает как дополнительный модуль банка данных 21 крана. В модуле 22а длина канатов на отрезке представлена на момент, предшествующий падению грейфера 2 на сыпучий материал 14. Тем самым может быть определена масса поддерживающих и замыкающих канатов 12,13 на этом отрезке. От модуля 22b задатчик 17 получает информацию о максимально допустимой нагрузке (БРН - безопасная рабочая нагрузка) в зависимости от величины рабочего радиуса а. Рабочий радиус а определяют по углу w изменения величины вылета стрелы. Модуль 22с служит для формирования дополнительных переменных. Через него можно вручную ввести исходные данные для ЗАДАННОЙ величины Fsoll. Это целесообразно сделать после замены грейфера на подъемном кране с целью ускорения достижения оптимального наполнения нового грейфера 2. В модуле 22d уточняют тенденцию: к чему более склонна ситуация: к перегрузке грейфера или недозагрузке его, а, следовательно - к увеличению или уменьшению ЗАДАННОЙ величины Fsoll. Эти тенденции можно отрегулировать на базе эмпирических величин. В частности, модуль 22d уточняет количество блокировок из-за перегрузок, что означает, что каждый раз итоговая масса превышала 110% максимально допустимой нагрузки.
Задатчик 17 формирует итеративный процесс, в котором степень наполнения грейфера 2 отрегулирована по кривой рабочей нагрузки. Уже при первой блокировке из-за перегрузки грейфера 2, все параметры данных пары «рабочий радиус а» и «величина наполнения грейфера» поступают в память. Когда грейфер 2 в следующий раз заглубляется в сыпучий материал 14, барабан натягивает поддерживающие канаты 12 с заранее заданным усилием Fsoll, соответствующим величине рабочего радиуса а, обеспечивающей меньшее погружение грейфера 2 в сыпучий материал 14 под действием собственной массы. При этом грейфер 2 забирает меньше груза и подъемный кран 1 работает без блокировок. Поскольку величина заглубления челюстей грейфера в сыпучий материал 14 зависит от нескольких факторов, то для каждого процесса захвата сыпучего материала 14 задающие параметры пересчитывают заново.
В процессе работы подъемного крана по погрузке-выгрузке сыпучего материала 14 задатчик 17 формирует разные тенденции работы, исходя из информации, хранящейся в банке данных 21, и из фактических данных для данного процесса о количестве блокировок вследствие перегрузок и количества циклов наполнения грейфера 2. Если при этом обнаруживается, что число блокировок превышает заданную величину, то задатчик 17 увеличивает ЗАДАННУЮ величину Fsoll. Упомянутые тенденции могут зависеть от максимально допустимой нагрузки, которая превышена для данного рабочего радиуса а, поэтому увеличение ЗАДАННОЙ величины Fsoll может иметь место даже в том случае, когда максимально допустимая нагрузка превышена только раз или несколько раз, но в течение определенного количества загрузок грейфера без учета ранее имевших место фактов блокировки. Если увеличение этого параметра недостаточное, то задатчик 17 снова увеличивает ЗАДАННУЮ величину Fsoll.
В результате, задатчик 17 увеличивает ЗАДАННУЮ величину Fsoll до тех пор, пока блокировки из-за перегрузки или случаи превышения максимально допустимой нагрузки перестанут превышать заранее заданное значение для данных циклов наполнения грейфера.
Если в ходе погрузочно-разгрузочных работ по тенденциям, формируемым в задатчике 17, выявляют, что частота блокировок из-за перегрузок грейфера или количество случаев превышения максимально допустимой нагрузки, иначе говоря, число нарушений рабочего цикла, не дотягивают до заданных величин, то задатчик 17 уменьшает ЗАДАННУЮ величину Fsoll. Если произведенное уменьшение указанного параметра недостаточно, то задатчик 17 продолжает уменьшать ЗАДАННУЮ величину Fsoll. В результате ЗАДАННУЮ величину Fsoll он уменьшает до величины, при которой частота остановки рабочего процесса достигает заданного значения, т.е. оптимизирует процесс наполнения грейфера для данного рабочего цикла.
Количество уменьшений или увеличений ЗАДАННОЙ величины Fsoll задатчиком 17 и быстроту его реакции на изменения тенденций можно параметрировать. Вследствие этого задатчик 17 становится адаптированным под подъемный кран 1, к его кривой рабочей нагрузки, к плотности сыпучего материала, к объему и массе грейфера.
ЗАДАННУЮ величину Fsoll увеличивают также, если выбранная кривая рабочей нагрузки использована на всю величину. Это предотвращает превышение установленного лимита перегрузок грейфера. Такого эффекта достигают благодаря соответствующей нечеткой логике в задатчике 17. Указанное увеличение ЗАДАННОЙ величины Fsoll дополнительно служит для предварительного натяжения поддерживающих канатов 12 в конце процедуры закрывания грейфера 2, достаточного, чтобы после закрывания грейфера 2 распределить силу натяжения между четырьмя канатами 12, 13, вследствие чего отсутствует «мертвое время» перед началом подъема грейфера 2 с грузом.
Кроме того, ЗАДАННЫЕ величины Fsoll автоматически учитывают длину отрезка поддерживающих и замыкающих канатов 12, 13. Задатчик 17 увеличивает или уменьшает ЗАДАННЫЕ величины Fsoll пропорционально увеличению или уменьшению величины . Благодаря этому силы натяжения канатов 12, 13 уравнены вследствие уравнивая масс этих канатов на отрезке . Далее, ЗАДАННЫЕ величины Fsoll автоматически самокорректируются при изменении рабочего радиуса а и максимально допустимой нагрузки.
Крановщик также может вручную через модуль (22с) исходных данных ввести в задатчик 17 ЗАДАННУЮ величину Fsoll, которая потом хранится в его памяти в качестве исходных данных. Это исключает необходимость предварительного определения тенденций для величины перегрузок грейфера и для их частоты.
Для вычисления задатчиком 17 тенденций, по которым рассчитывают ЗАДАННУЮ величину Fsoll, предусмотрен расчет этой величины с учетом кривой рабочей нагрузки первого диапазона нагрузки I, первого субдиапазона нагрузки II1, второго субдиапазона нагрузки II2, третьего субдиапазона нагрузки II3 и четвертого субдиапазона нагрузки II4. В первом диапазоне нагрузки I величина максимально допустимой нагрузки не зависит от величины рабочего радиуса а. Поэтому коррекции ЗАДАННОЙ величины Fsoll не происходит. Второй диапазон нагрузки II, носящий нелинейный характер, разделен на субдиапазоны II1, II2, II3 и II4. Задатчик 17 распределяет уточненные тенденции по диапазонам нагрузки или субдиапазонам I, II1, II2, II3 и II4. Поэтому оптимальное наполнение грейфера 2 может быть достигнуто гораздо быстрее по рабочему радиусу а. Это особенно эффективно, когда, например, подъемный кран 1 находится поочередно между различными люками судна 15. Поэтому подъемный кран 1 всегда работает, даже при первом цикле загрузок грейфера, при максимально допустимой нагрузке без нежелательных блокировок из-за перегруза.
Задатчик 17 складывает вместе все отдельные увеличения или уменьшения ЗАДАННОЙ величины Fsoll и передает их на регулятор 18 силы натяжения канатов.
Для адаптации задатчика 17 к подъемному крану 1 по кривой рабочей нагрузки крана 1, по плотности сыпучего материала, по объему и массе грейфера можно установить следующие параметры:
- число циклов «загрузки-выгрузки» грейфера до увеличения заданной силы натяжения канатов (сбой в работе = 1,0), пример: если сбои в работе взяты за 1,0, то заданную величину увеличивают в случае блокировки из-за перегрузки.
- процент увеличения заданной величины силы натяжения канатов (сбой в работе = 5,0).
- количество циклов «загрузки-выгрузки» грейфера до уменьшения заданной величины силы натяжения канатов (сбой в работе = 2.0), пример: при параметре 2.0 заданную величину силы натяжения канатов уменьшают, если уже во время второго цикла степень заполнения грейфера сыпучим материалом составляет менее 80%.
- процент уменьшения заданной величины силы натяжения канатов (сбой в работе = 3,0).
Эти величины являются исходными данными в начале работы подъемного крана 1 с тем или иным грейфером 2. При этом перед работой с каждым из грейферов 2 или, по крайней мере, перед работой с самым легким из грейферов 2, уточняют базовую ЗАДАННУЮ величину силы натяжения канатов. Эту величину в качестве исходных данных вручную вводят в задатчик 17 при каждой замене грейфера 2. На начальной стадии работы указанные параметры оптимизируют с целью как можно быстрее достичь оптимального наполнения грейфера 2. Если, к примеру, используют очень объемный или очень тяжелый грейфер, то ЗАДАННУЮ величину Fsoll в виде процента от номинального крутящего момента электродвигателя 19 откорректируют таким образом, что грейфер 2 не будет погружаться в сыпучий материал 14, поскольку электродвигатель 19 будет иметь такой высокий крутящий момент, что будет удерживать грейфер от свободного падения на сыпучий материал.
По окончании первоначальной стадии работы проводят проверку успешности произведенных корректировок и пригодности их для данного случая.
Если блокировки крана из-за перегрузки грейфера все-таки происходят, то после трех блокировок подряд частоту их можно уменьшить путем изменения параметров либо введением вручную ЗАДАННОЙ величины Fsoll в задатчик 17, который скорректирует параметры, влияющие на ЗАДАННУЮ величину Fsoll. Корректировка производится в рамках начальной стадии работы подъемного крана с учетом параметров используемых крана и грейфера. Поскольку задачей задатчика 17 согласно изобретению является оптимизация наполнения грейфера 2 сыпучим материалом 14, каждый оптимизированный процесс работы протекает при почти 100% допустимой нагрузке, т.е. в режиме близком к перегрузке и блокировки крана из-за перегрузки грейфера иногда имеют место, но частота их резко сокращена за счет постепенного увеличения и уменьшения ЗАДАННОЙ величины Fsoll. На первоначальном этапе работы крана 10% случаев блокировки крана из-за перегрузки не являются критическими и задатчик 17 воспринимает их как удовлетворительный результат. Это означает, что при 50-60 загрузках грейфера в час 5-6 блокировок допустимы. Без задатчика 17 число блокировок достигает 50% за час, особенно при сыпучем материале 14 с большой удельной массой и при грейфере слишком большого объема для данного сыпучего материала.
Каждый случай блокировки работы подъемного крана удлиняет время его работы, что отрицательно сказывается на производительности. С помощью задатчика 17 по данному изобретению грейфер 2 постоянно оптимально наполнен при любых условиях работы, потому что степень заполнения грейфера корректируют постоянно автоматически по величине рабочего радиуса а без участия крановщика.
Поскольку силы натяжения поддерживающих канатов 12 пропорциональны величине крутящего момента, сообщенного электродвигателем 19 барабану, на который намотан поддерживающий канат 12, то изобретение включает в себя не только определение сил натяжения канатов и корректировку их, но и соответствующие им крутящие моменты электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРЕЙФЕР ДЛЯ РЫТЬЯ КОЛОДЦЕВ | 1985 |
|
SU1347346A1 |
| Многочелюстной грейфер | 1988 |
|
SU1646979A1 |
| Перегружатель гидравлический полноповоротный с дополнительным противовесом | 2019 |
|
RU2717108C1 |
| Грейфер | 1978 |
|
SU742541A1 |
| Устройство для соединения грузозахватных органов с канатами грузоподъемной машины | 1984 |
|
SU1203002A1 |
| Ограничитель момента стрелового крана | 1988 |
|
SU1532526A1 |
| Устройство для механизации работ на литейном дворе доменной печи | 1982 |
|
SU1086016A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ПРИ ПОДЪЕМЕ ГРУЗА ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2312814C1 |
| Устройство для управления лебедками грейферного крана | 1987 |
|
SU1602848A2 |
| Устройство для управления лебедками грейферного крана | 1986 |
|
SU1370053A1 |
Грейфер (2) заглубляют в сыпучий материал (14) под действием силы его тяжести. Степень наполнения грейфера корректируют с помощью задатчика, подающего управляющие сигналы на средства изменения силы натяжения поддерживающих канатов. Задатчиком устанавливают заданную величину (Fsoll) силы натяжения поддерживающих канатов (12), посылают из задатчика соответствующую переменную на вход регулятора силы натяжения канатов, который управляет электродвигателем для поднятия и опускания грейфера (2). При этом на вход регулятора силы натяжения канатов посылают второй сигнал уточненной фактической величины (Fist) силы натяжения поддерживающих канатов (12). Достигается снижение числа блокировок подъемного крана из-за перегрузок. 26 з.п. ф-лы, 4 ил.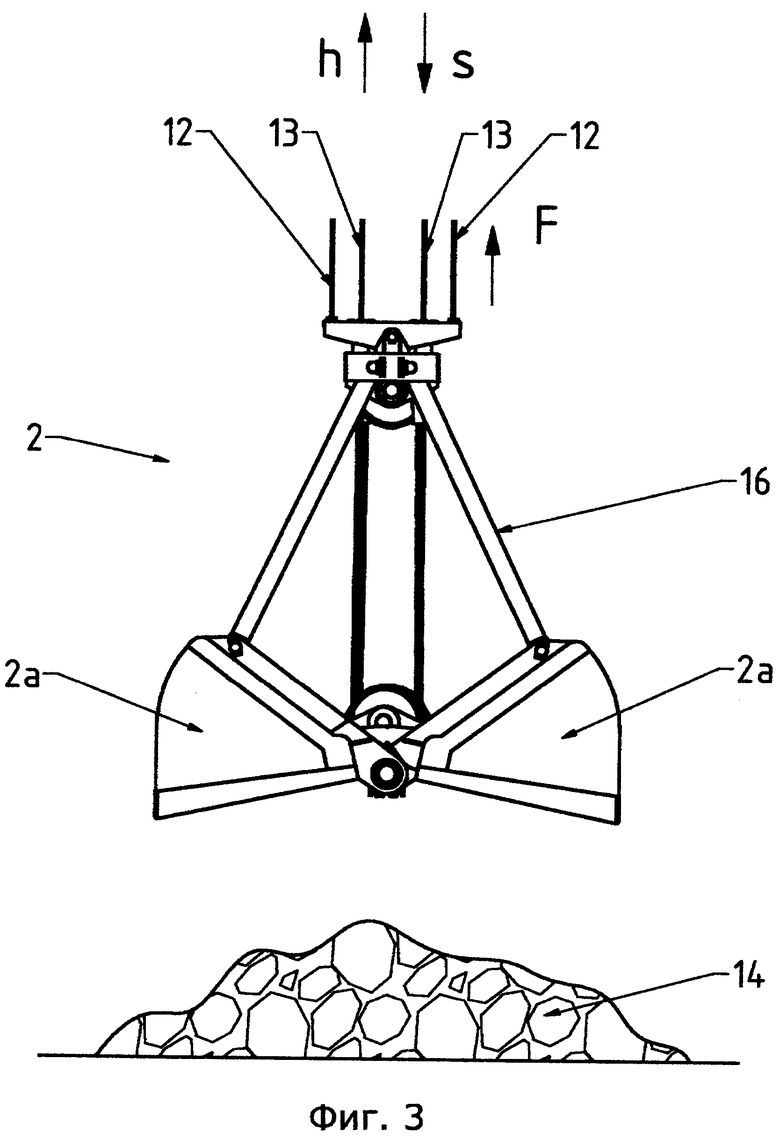
1. Способ управления наполнением сыпучим материалом (14) грейфера (2), закрепленного на поддерживающих канатах (12), на которых его поднимает и опускает подъемный кран (1) с использованием задатчика (17) управляющих сигналов, при этом грейфер (2) заглубляют в сыпучий материал (14) под действием силы его тяжести при закрывании и наполнении грейфера (2), при котором степень наполнения грейфера корректируют с помощью задатчика (17), подающего управляющие сигналы на средства изменения силы натяжения поддерживающих канатов (12), отличающийся тем, что задатчиком (17) устанавливают заданную величину (Fsoll) силы натяжения поддерживающих канатов (12), посылают из задатчика (17) соответствующую переменную на вход регулятора (18) силы натяжения канатов, который управляет электродвигателем (19) для поднятия и опускания грейфера (2), при этом на вход регулятора (18) силы натяжения канатов посылают второй сигнал уточненной фактической величины (Fist) силы натяжения поддерживающих канатов (12).
2. Способ по п. 1, отличающийся тем, что время изменения заданной величины (Fsoll) и величину приращения изменения заданной величины (Fsoll) подают в задатчик (17) через модуль (22d) определения тенденции со ссылкой на прогрессии уточненных рабочих нагрузок.
3. Способ по п. 2, отличающийся тем, что заданную величину (Fsoll) увеличивают в соответствии с тенденцией, выявленной модулем (22d), в случае, когда частота блокировок работы подъемного крана (1) из-за перегрузки превышает заданное число относительно числа циклов наполнения грейфера (2) и/или когда частота превышений при этом максимально допустимой нагрузки больше заданной для данного рабочего радиуса (a).
4. Способ по п. 2 или 3, отличающийся тем, что заданную величину (Fsoll) уменьшают в соответствии с тенденцией, выявленной модулем (22d), в случае, когда частота блокировок работы подъемного крана (1) из-за перегрузки меньше заданного числа относительно числа циклов наполнения грейфера (2) и/или когда частота превышений максимально допустимой нагрузки меньше заданной для данного рабочего радиуса (a).
5. Способ по любому из пп. 1-3, отличающийся тем, что при корректировке процесса закрывания грейфера (2) и наполнения его сыпучим материалом (14) в задатчик (17) вводят и фактическую величину (Fist) силы натяжения канатов (12), действующую по направлению (h) подъема грейфера (2) подъемным краном (1).
6. Способ по п. 4, отличающийся тем, что при корректировке процесса закрывания грейфера (2) и наполнения его сыпучим материалом (14) в задатчик (17) вводят и фактическую величину (Fist) силы натяжения канатов (12), действующую по направлению (h) подъема грейфера (2) подъемным краном (1).
7. Способ по любому из пп. 1-3 или 6, отличающийся тем, что задатчик (17) задает степень наполнения грейфера (2), исходя из рабочей нагрузки, уточненной после подъема наполненного грейфера (2) при известной массе пустого грейфера (2).
8. Способ по п. 4, отличающийся тем, что задатчик (17) задает степень наполнения грейфера (2), исходя из рабочей нагрузки, уточненной после подъема наполненного грейфера (2) при известной массе пустого грейфера (2).
9. Способ по п. 5, отличающийся тем, что задатчик (17) задает степень наполнения грейфера (2), исходя из рабочей нагрузки, уточненной после подъема наполненного грейфера (2) при известной массе пустого грейфера (2).
10. Способ по п. 7, отличающийся тем, что длину отрезка  свисающего каната (12, 13), начинающегося от грейфера (2) и тянущегося в направлении подъема (h) до стрелы подъемного крана (1), через модуль (22а) данных о длине каната вводят в задатчик (17), который при этом учитывает массу канатов (12, 13) на отрезке
свисающего каната (12, 13), начинающегося от грейфера (2) и тянущегося в направлении подъема (h) до стрелы подъемного крана (1), через модуль (22а) данных о длине каната вводят в задатчик (17), который при этом учитывает массу канатов (12, 13) на отрезке  вместе с массой пустого грейфера (2) в процессе вычисления степени наполнения грейфера (2).
вместе с массой пустого грейфера (2) в процессе вычисления степени наполнения грейфера (2).
11. Способ по любому из пп. 8 или 9, отличающийся тем, что длину отрезка  свисающего каната (12, 13), начинающегося от грейфера (2) и тянущегося в направлении подъема (h) до стрелы подъемного крана (1), через модуль (22а) данных о длине каната вводят в задатчик (17), который при этом учитывает массу канатов (12, 13) на отрезке
свисающего каната (12, 13), начинающегося от грейфера (2) и тянущегося в направлении подъема (h) до стрелы подъемного крана (1), через модуль (22а) данных о длине каната вводят в задатчик (17), который при этом учитывает массу канатов (12, 13) на отрезке  вместе с массой пустого грейфера (2) в процессе вычисления степени наполнения грейфера (2).
вместе с массой пустого грейфера (2) в процессе вычисления степени наполнения грейфера (2).
12. Способ по любому из пп. 1-3, 6, 8, 9 или 10, отличающийся тем, что из модуля (22b) кривой рабочей нагрузки в задатчик (17) вводят данные о максимально допустимой нагрузке для подъемного крана (1) при данной величине рабочего радиуса (а) грейфера (2).
13. Способ по п. 4, отличающийся тем, что из модуля (22b) кривой рабочей нагрузки в задатчик (17) вводят данные о максимально допустимой нагрузке для подъемного крана (1) при данной величине рабочего радиуса (а) грейфера (2).
14. Способ по п. 5, отличающийся тем, что из модуля (22b) кривой рабочей нагрузки в задатчик (17) вводят данные о максимально допустимой нагрузке для подъемного крана (1) при данной величине рабочего радиуса (а) грейфера (2).
15. Способ по п. 7, отличающийся тем, что из модуля (22b) кривой рабочей нагрузки в задатчик (17) вводят данные о максимально допустимой нагрузке для подъемного крана (1) при данной величине рабочего радиуса (а) грейфера (2).
16. Способ по п. 11, отличающийся тем, что из модуля (22b) кривой рабочей нагрузки в задатчик (17) вводят данные о максимально допустимой нагрузке для подъемного крана (1) при данной величине рабочего радиуса (а) грейфера (2).
17. Способ по п. 7, отличающийся тем, что в задатчике (17) заданную величину (Fsoll) многократно уменьшают или увеличивают, используя входные данные от модуля (22b) кривой рабочей нагрузки, модуля (22а) длины каната на отрезке  и данные об уточненной рабочей нагрузке (TL), пока степень наполнения грейфера (2) сыпучим материалом (14) не достигнет 100% максимально допустимой нагрузки.
и данные об уточненной рабочей нагрузке (TL), пока степень наполнения грейфера (2) сыпучим материалом (14) не достигнет 100% максимально допустимой нагрузки.
18. Способ по п. 11, отличающийся тем, что в задатчике (17) заданную величину (Fsoll) многократно уменьшают или увеличивают, используя входные данные от модуля (22b) кривой рабочей нагрузки, модуля (22а) длины каната на отрезке  и данные об уточненной рабочей нагрузке (TL), пока степень наполнения грейфера (2) сыпучим материалом (14) не достигнет 100% максимально допустимой нагрузки.
и данные об уточненной рабочей нагрузке (TL), пока степень наполнения грейфера (2) сыпучим материалом (14) не достигнет 100% максимально допустимой нагрузки.
19. Способ по п. 12, отличающийся тем, что в задатчике (17) заданную величину (Fsoll) многократно уменьшают или увеличивают, используя входные данные от модуля (22b) кривой рабочей нагрузки, модуля (22а) длины каната на отрезке  и данные об уточненной рабочей нагрузке (TL), пока степень наполнения грейфера (2) сыпучим материалом (14) не достигнет 100% максимально допустимой нагрузки.
и данные об уточненной рабочей нагрузке (TL), пока степень наполнения грейфера (2) сыпучим материалом (14) не достигнет 100% максимально допустимой нагрузки.
20. Способ по любому из пп. 8-10, 13-15 или 16, отличающийся тем, что в задатчике (17) заданную величину (Fsoll) многократно уменьшают или увеличивают, используя входные данные от модуля (22b) кривой рабочей нагрузки, модуля (22а) длины каната на отрезке  и данные об уточненной рабочей нагрузке (TL), пока степень наполнения грейфера (2) сыпучим материалом (14) не достигнет 100% максимально допустимой нагрузки.
и данные об уточненной рабочей нагрузке (TL), пока степень наполнения грейфера (2) сыпучим материалом (14) не достигнет 100% максимально допустимой нагрузки.
21. Способ по любому из пп. 1-3, 6, 8-10, 13-18 или 19, отличающийся тем, что заданную величину (Fsoll) в качестве исходной переменной вручную вводят в задатчик (17) через модуль (22c) исходных данных.
22. Способ по п. 4, отличающийся тем, что заданную величину (Fsoll) в качестве исходной переменной вручную вводят в задатчик (17) через модуль (22c) исходных данных.
23. Способ по п. 5, отличающийся тем, что заданную величину (Fsoll) в качестве исходной переменной вручную вводят в задатчик (17) через модуль (22c) исходных данных.
24. Способ по п. 7, отличающийся тем, что заданную величину (Fsoll) в качестве исходной переменной вручную вводят в задатчик (17) через модуль (22c) исходных данных.
25. Способ по п. 11, отличающийся тем, что заданную величину (Fsoll) в качестве исходной переменной вручную вводят в задатчик (17) через модуль (22c) исходных данных.
26. Способ по п. 12, отличающийся тем, что заданную величину (Fsoll) в качестве исходной переменной вручную вводят в задатчик (17) через модуль (22c) исходных данных.
27. Способ по п. 20, отличающийся тем, что заданную величину (Fsoll) в качестве исходной переменной вручную вводят в задатчик (17) через модуль (22c) исходных данных.
| Способ управления процессом загрузки грейфера и устройство для его осуществления | 1977 |
|
SU730632A1 |
| Устройство для управления лебедками грейферного крана | 1987 |
|
SU1602848A2 |
| JP S57151735 A, 18.09.1982. | |||

