Изобретение относится к подъемно-транспортному оборудованию, а именно к средствам для управления работой грейферных лебедок.
Цель изобретения - повышение надежности.
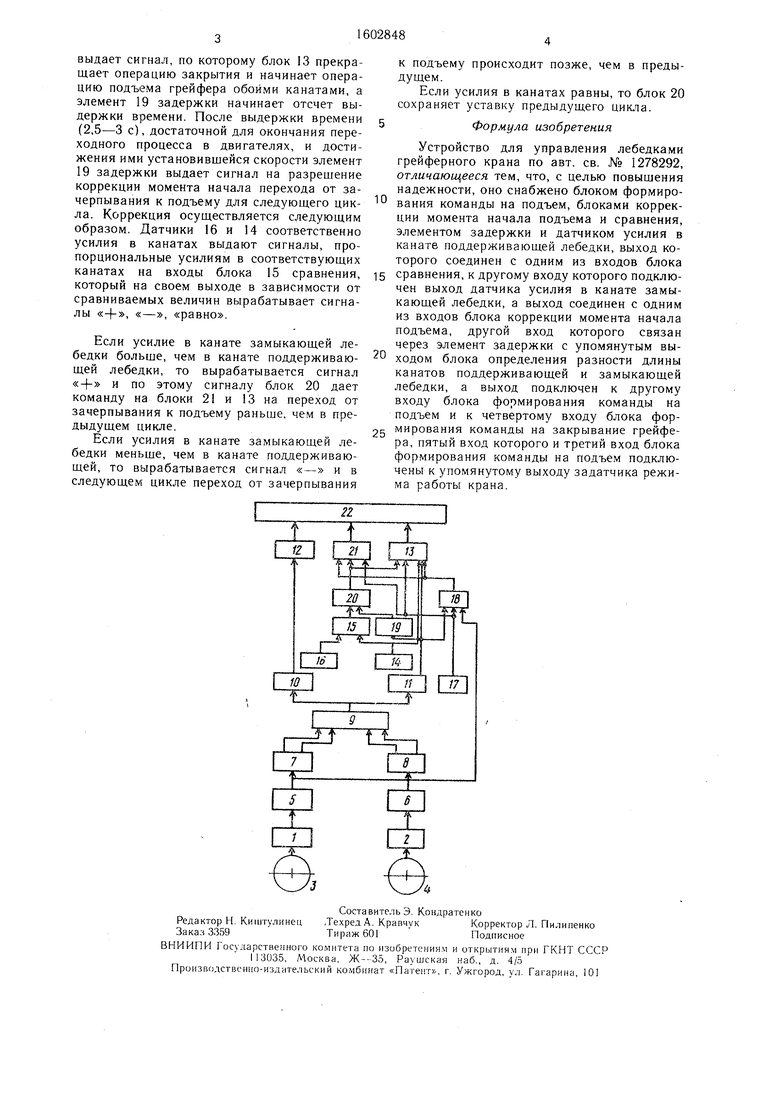
На чертеже представлена функциональная схема устройства.
Устройство для управления лебедками грейферного крана содержит датчики 1 и 2 длины канатов соответственно поддерживающей и замыкающей лебедок 3 и 4, блоки 5 и 6 определения направления движения канатов, выходы которых подключены к блокам 7 и 8 оценки знака сигнала, выходы которых подключены к входам блока 9 определения разности длины канатов, выходы которого через дешифраторы 10 и 11 связаны с входами соответственно блоков 12 и 13 формирования команд соответственно на открывание и закрывание грейфера, причем к входу блока 13 подключен выход датчика 14 усилия в канате замыкающей лебедки, блок 15 сравнения, к одному входу которого подключен датчик 16 усилия в канате поддерживающей лебедки, а к другому - упомянутый выход датчика 14, причем к входу блока 13 подключен выход задатчика 17 режима работы крана, который соединен с входом элемента 18 И-НЕ. Устройство содержит также элемент 19 задержки, подключенный входом к выходу де- щифратора 11, а выходом - к входу блока 20 коррекции момента начала подъема, выход которого соединен с блоком 21 формирования команды на подъем, причем блоки 12, 13 и 21 подключены к блоку 22 управления лебедками.
Устройство работает следующим образом.
После подачи команды зачерпывание с подъемом с помощью задатчика 17 сигнал поступает на блок 13 и блок 21. Эти блоки через блок 22 подключают замыкающую лебедку в сторону выбирания каната с полным моментом и на полной скорости, а поддерживающую лебедку на подъем с малым моментом, не мешающим грейферу углубляться в материал и в то же время достаточным для выбора слабины каната (поддерживающей лебедки).
Блок 9 обрабатывает сигналы, поступающие с датчиков 1 и 2 длины канатов и сигнал на его выходе соответствует разнице длин канатов лебедок. После того, как челюсти грейфера сходятся, дешифратор 11
S
(Л
05
о ю
00 4
00
14)
выдает сигнал, по которому блок 13 прекращает операцию закрытия и начинает операцию подъема грейфера обойми канатами, а элемент 19 задержки начинает отсчет выдержки времени. После выдержки времени (2,5-3 с), достаточной для окончания переходного процесса в двигателях, и достижения ими установившейся скорости элемент 19 задержки выдает сигнал на разрешение коррекции момента начала перехода от зачерпывания к подъему для следующего цикла. Коррекция осуществляется следующим образом. Датчики 16 и 14 соответственно усилия в канатах выдают сигналы, пропорциональные усилиям в соответствующих канатах на входы блока 15 сравнения, который на своем выходе в зависимости от сравниваемых величин вырабатывает сигналы «+, «-, «равно.
Если усилие в канате замыкающей лебедки больше, чем в канате поддерживающей лебедки, то вырабатывается сигнал «+ и по этому сигналу блок 20 дает команду на блоки 21 и 13 на переход от зачерпывания к подъему раньше, чем в предыдущем цикле.
Если усилия в канате замыкающей лебедки меньше, чем в канате поддерживаю- шей, то вырабатывается сигнал «- и в следующем цикле переход от зачерпывания
к подъему происходит позже, чем в предыдущем.
Если усилия в канатах равны, то блок 20 сохраняет уставку предыдущего цикла.
5Формула изобретения
Устройство для управления лебедками грейферного крана по авт. св. № 1278292, отличающееся тем, что, с целью повышения надежности, оно снабжено блоком формиро вания команды на подъем, блоками коррекции момента начала подъема и сравнения, элементом задержки и датчиком усилия в канате поддерживающей лебедки, выход которого соединен с одним из входов блока
5 сравнения, к другому входу которого подключен выход датчика усилия в канате замыкающей лебедки, а выход соединен с одним из входов блока коррекции момента начала подъема, другой вход которого связан через элемент задержки с упомянутым вы ходом блока определения разности длины канатов поддерживающей и замыкающей лебедки, а выход подключен к другому входу блока формирования команды на подъем и к четвертому входу блока форg мирования команды на закрывание грейфера, пятый вход которого и третий вход блока формирования команды на подъем подключены к упомянутому выходу задатчика режима работы крана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводами грейферного крана | 1979 |
|
SU965965A1 |
| Устройство для управления лебедками грейферного крана | 1989 |
|
SU1730021A1 |
| Устройство для управления электроприводами грузовых лебедок грейферного крана | 1986 |
|
SU1426933A1 |
| Устройство для автоматического управления грейферным краном | 1983 |
|
SU1147675A2 |
| Устройство для управления лебедками груейферного крана | 1984 |
|
SU1278292A1 |
| Устройство для автоматического управления грейферным краном | 1977 |
|
SU743944A1 |
| Устройство для управления асинхронными приводами замыкающей и поддерживающей лебедок грейферного крана | 1981 |
|
SU998310A1 |
| Устройство для управления лебедками грейферного крана | 1986 |
|
SU1370053A1 |
| Способ управления процессом загрузки грейфера и устройство для его осуществления | 1977 |
|
SU730632A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ГРЕЙФЕРНЫМ КРАНОМ ТРЕХФАЗНОГО ТОКА | 1960 |
|
SU146932A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к средствам для управления работой грейферных лебедок. Цель изобретения - повышение надежности. В устройстве блок 20 коррекции момента начала подъема в зависимости от сигналов датчиков 14 и 16 усилий в канатах соответственно замыкающей и поддерживающей лебедок, которые сравниваются в блоке 15 сравнения, выдает команды на переход от зачерпывания к подъему раньше или позже, чем в предыдущем цикле. 1 ил.
| Устройство для управления лебедками груейферного крана | 1984 |
|
SU1278292A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
