[0001] Настоящая заявка основана на заявке на патент КНР №CN201610710898.0, поданной 23 августа 2016 г, полное содержание которой включено в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к области технологии балансирующих тележек и, в частности, к способу и устройству управления балансирующей тележкой.
УРОВЕНЬ ТЕХНИКИ
[0003] В настоящее время все больше пользователей используют балансирующую тележку ("гироскутер") вместо ходьбы. Однако управление балансирующей тележкой не разрешено в некоторых зонах в целях безопасности, поэтому пользователю может потребоваться тащить балансирующую тележку вручную, если он хочет переместить ее в какое-либо место в этих зонах, что неудобно для пользователя и требует значительной физической силы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Предлагаются способ и устройство управления балансирующей тележкой с помощью вариантов осуществления настоящего изобретения. Техническими решениями являются следующие.
[0005] В соответствии с первым аспектом вариантов осуществления настоящего изобретения предлагается способ управления балансирующей тележкой. Способ включает в себя:
обнаружение целевого навигационного маркера, используемого для навигации балансирующей тележки; и
управление балансирующей тележкой так, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда этот целевой навигационный маркер обнаружен.
[0006] В варианте осуществления обнаружение навигационного маркера объекта, используемого для навигации балансирующей тележки, включает в себя:
обнаружение потенциального маркера на дороге, на которой находится балансирующая тележка;
получение атрибутивной информации потенциального маркера в ответ на обнаружение потенциального маркера; и
определение целевого навигационного маркера в соответствии с атрибутивной информацией, если сходство между атрибутивной информацией целевого навигационного маркера и заранее заданной атрибутивной информацией больше, чем заранее заданное сходство.
[0007] В варианте осуществления целевой навигационный маркер представляет собой по меньшей мере одно из графического навигационного маркера, аудионавигационного маркера, видеонавигационного маркера и инфракрасного навигационного маркера; и
целевой навигационный маркер указывает по меньшей мере одно из направления перемещения и скорости перемещения.
[0008] В варианте осуществления целевой навигационный маркер представляет собой графический навигационный маркер, балансирующая тележка снабжена камерой; и
обнаружение целевого навигационного маркера, используемого для навигации балансирующей тележки, включает в себя:
получение с помощью камеры изображения дороги, на которой находится балансирующая тележка; и
обнаружение графического навигационного маркера путем распознавания изображения дороги.
[0009] В одном варианте осуществления графический навигационный маркер представляет собой по меньшей мере одно из навигационного знака на дороге, навигационного знака на дорожном указателе и навигационного знака на здании возле дороги.
[0010] В одном варианте осуществления целевой навигационный маркер представляет собой навигационный знак на дороге, при этом навигационный знак на дороге представляет собой навигационную линию на дороге; и
атрибутивная информация включает в себя по меньшей мере одно из заданных положения, цвета, длины и ширины.
[0011] В варианте осуществления управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, включает в себя:
управление балансирующей тележкой, чтобы она перемещалась вдоль навигационной линии на дороге.
[0012] В одном варианте осуществления управление балансирующей тележкой для перемещения в соответствии с целевым навигационным маркером включает в себя:
управление балансирующей тележкой так, чтобы целевой навигационный маркер присутствовал на изображении дороги.
[0013] В одном варианте осуществления управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, включает в себя:
получение команды перемещения в соответствии с целевым навигационным маркером; и
управление балансирующей тележкой, чтобы она перемещалась в соответствии с командой перемещения.
[0014] В соответствии со вторым аспектом вариантов осуществления настоящего изображения предлагается устройство для управления балансирующей тележкой. Устройство содержит:
модуль обнаружения, выполненный с возможностью обнаруживать целевой навигационный маркер, используемый для навигации балансирующей тележки; и
модуль управления, выполненный с возможностью управлять балансирующей тележкой так, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда этот целевой навигационный маркер обнаружен с помощью модуля обнаружения.
[0015] В одном варианте осуществления модуль обнаружения содержит:
первый подмодуль обнаружения, выполненный с возможностью обнаруживать потенциальный маркер на дороге, на которой находится балансирующая тележка;
первый подмодуль получения, выполненный с возможностью получать атрибутивную информацию потенциального маркера в ответ на обнаружение потенциального маркера с помощью первого подмодуля обнаружения; и
второй подмодуль получения, выполненный с возможностью получать целевой навигационный маркер в соответствии с атрибутивной информацией, полученной с помощью первого подмодуля получения, если сходство между атрибутивной информацией целевого навигационного маркера и заранее заданной атрибутивной информацией больше, чем заранее заданное сходство.
[0016] В одном варианте осуществления целевой навигационный маркер представляет собой по меньшей мере одно из графического навигационного маркера, аудионавигационного маркера, видеонавигационного маркера и инфракрасного навигационного маркера; и
целевой навигационный маркер указывает по меньшей мере одно из направления перемещения и скорости перемещения.
[0017] В одном варианте осуществления целевой навигационный маркер представляет собой графический навигационный маркер, балансирующая тележка снабжена камерой; и
модуль обнаружения содержит:
третий подмодуль получения, выполненный с возможностью получать с помощью камеры изображение дороги, на которой находится балансирующая тележка; и
второй подмодуль обнаружения, выполненный с возможностью обнаруживать графический навигационный маркер путем распознавания изображения дороги, полученного с помощью третьего подмодуля получения.
[0018] В варианте осуществления графический навигационный маркер представляет собой по меньшей мере одно из навигационного знака на дороге, навигационного знака на дорожном указателе и навигационного знака на здании возле дороги.
[0019] В одном варианте осуществления целевой навигационный маркер представляет собой навигационный знак на дороге, при этом навигационный знак на дороге представляет собой навигационную линию на дороге;
атрибутивная информация включает в себя по меньшей мере одно из заданных положения, цвета, длины и ширины.
[0020] В одном варианте осуществления модуль управления содержит:
первый подмодуль управления, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась вдоль навигационной линии на дороге.
[0021] В одном варианте осуществления модуль управления содержит:
второй подмодуль управления, выполненный с возможностью управлять балансирующей тележкой так, чтобы целевой навигационный маркер присутствовал на изображении дороги, полученном с помощью третьего подмодуля получения.
[0022] В одном варианте осуществления модуль управления содержит:
четвертый подмодуль получения, выполненный с возможностью получать команду перемещения в соответствии с целевым навигационным маркером, обнаруженным с помощью модуля обнаружения; и
третий подмодуль управления, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась в соответствии с командой перемещения, полученной с помощью четверного подмодуля получения.
[0023] В соответствии с третьим аспектом вариантов осуществления настоящего изобретения предлагается устройство для управления балансирующей тележкой. Устройство содержит:
процессор; и
память, выполненную с возможностью хранить команду, исполняемую процессором;
где процессор выполнен с возможностью:
обнаруживать целевой навигационный маркер, используемый для навигации балансирующей тележки; и
управлять балансирующей тележкой так, чтобы она перемещалась в соответствии с навигационным маркером, когда целевой навигационный маркер обнаружен.
[0024] Технические решения, предлагаемые в вариантах осуществления настоящего изобретения, могут достичь следующих положительных эффектов.
[0025] В соответствии с техническими решениями, предлагаемыми в вариантах осуществления настоящего изобретения, путем обнаружения целевого навигационного маркера, используемого для навигации балансирующей тележки, этой балансирующей тележкой можно управлять интеллектуальным образом, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда обнаружен целевой навигационный маркер, без необходимости пользователю управлять балансирующей тележкой, таким образом может быть реализовано интеллектуальное управление балансирующей тележкой, и может быть преодолена проблема, заключающаяся в том, что пользователю необходимо перетаскивать балансирующую тележку вручную, если он не может ехать на ней, и устраняются трудности для пользователя.
[0026] Следует понимать, что как вышеуказанное общее описание, так и подробное описание ниже являются просто примерами и не ограничивают настоящее изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0027] Прилагаемые чертежи включены в настоящее описание и составляют
часть этого описания, иллюстрируют варианты осуществления в соответствии с описанием и вместе с ним служат для объяснения принципов изобретения.
[0028] Фиг. 1 представляет блок-схему, иллюстрирующую способ управления балансирующей тележкой в соответствии с примером осуществления.
[0029] Фиг. 2 представляет блок-схему, иллюстрирующую, как целевой навигационный маркер, используемый для навигации балансирующей тележки, обнаруживают в соответствии с примером осуществления.
[0030] Фиг. 3 представляет блок-схему, иллюстрирующую, как целевой навигационный маркер, используемый для навигации балансирующей тележки, обнаруживают в соответствии с другим примером осуществления.
[0031] Фиг. 4 представляет блок-схему, иллюстрирующую, как балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером в соответствии с примером осуществления.
[0032] Фиг. 5 представляет блок-схему, иллюстрирующую, как балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером в соответствии с другим примером осуществления.
[0033] Фиг. 6 представляет блок-схему, иллюстрирующую, как балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером в соответствии с еще одним примером осуществления.
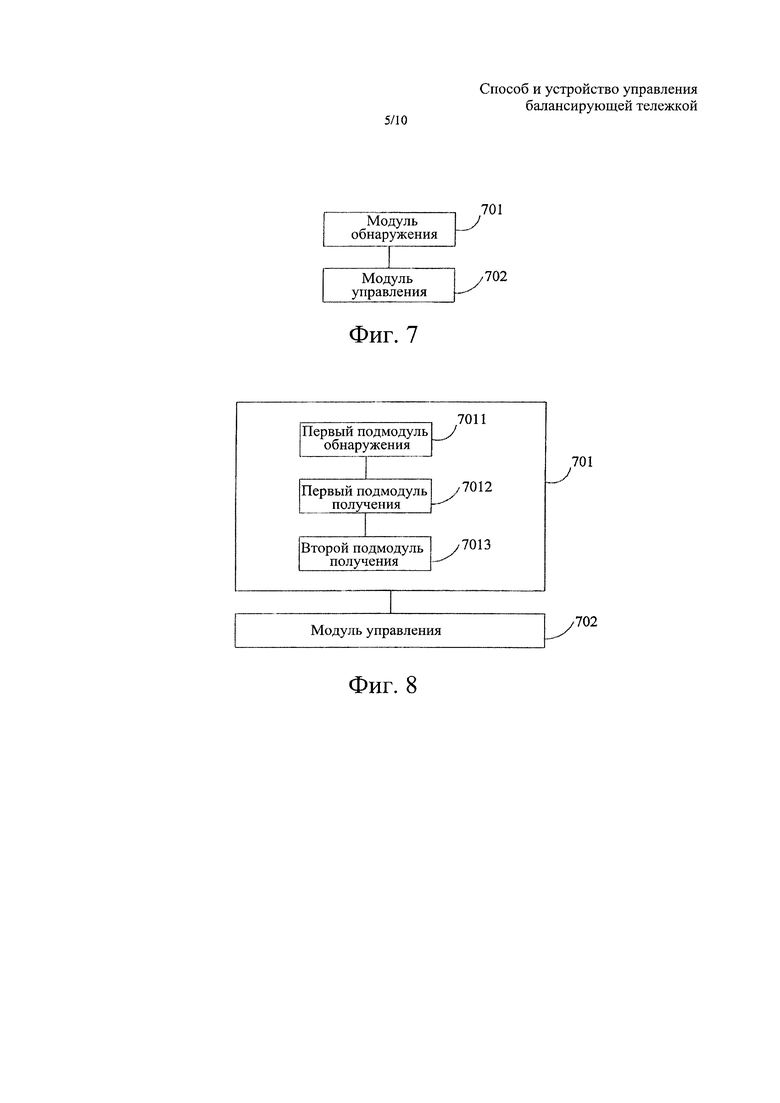
[0034] Фиг. 7 представляет структурную схему, иллюстрирующую устройство для управления балансирующей тележкой в соответствии с примером осуществления.
[0035] Фиг. 8 представляет структурную схему, иллюстрирующую модуль обнаружения в соответствии с примером осуществления.
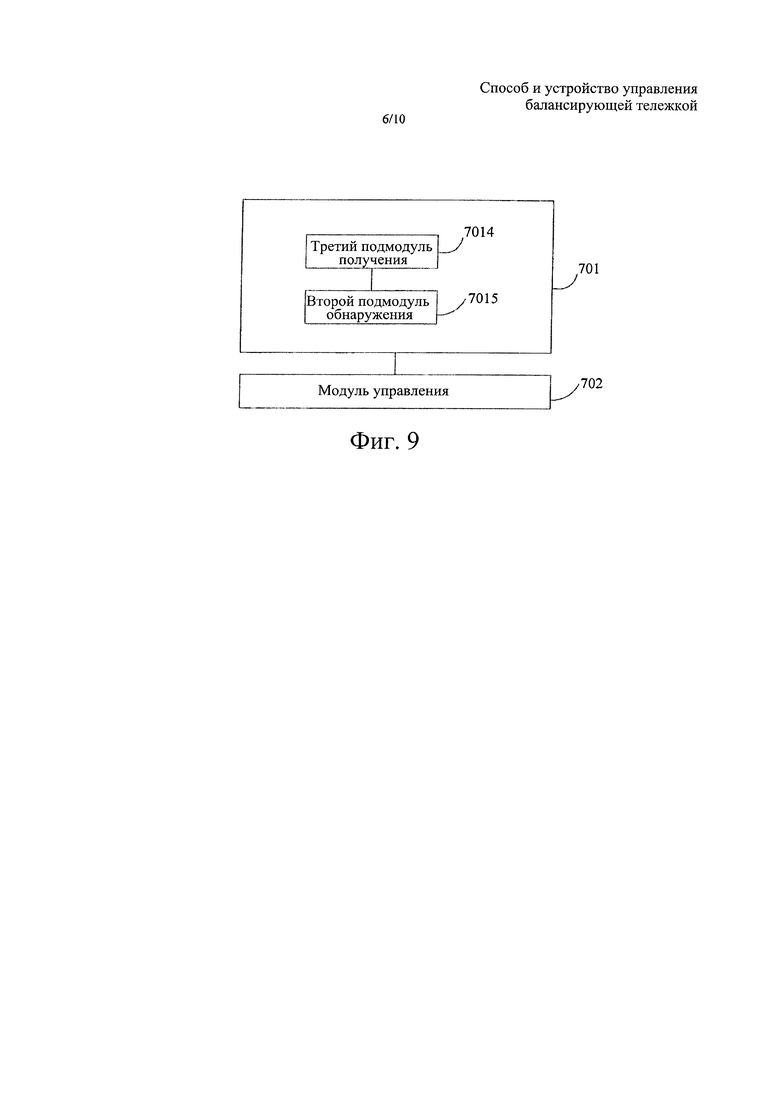
[0036] Фиг. 9 представляет структурную схему, иллюстрирующую модуль обнаружения в соответствии с другим примером осуществления.
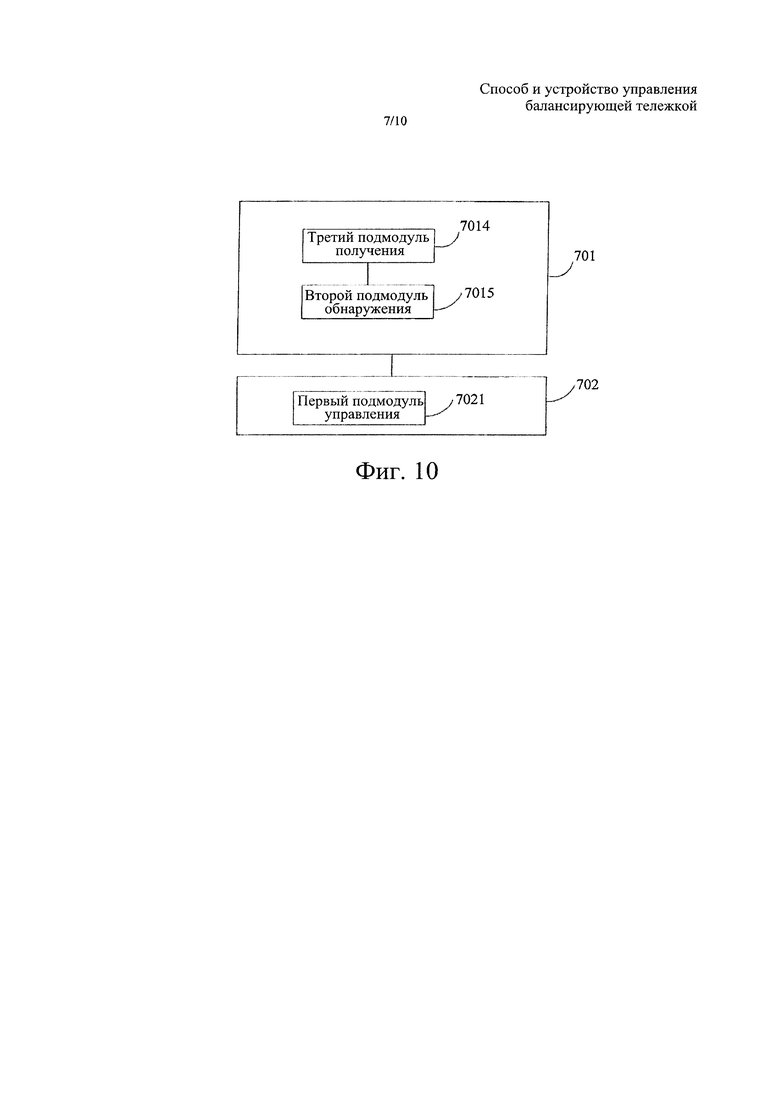
[0037] Фиг. 10 представляет структурную схему, иллюстрирующую модуль управления в соответствии с примером осуществления.
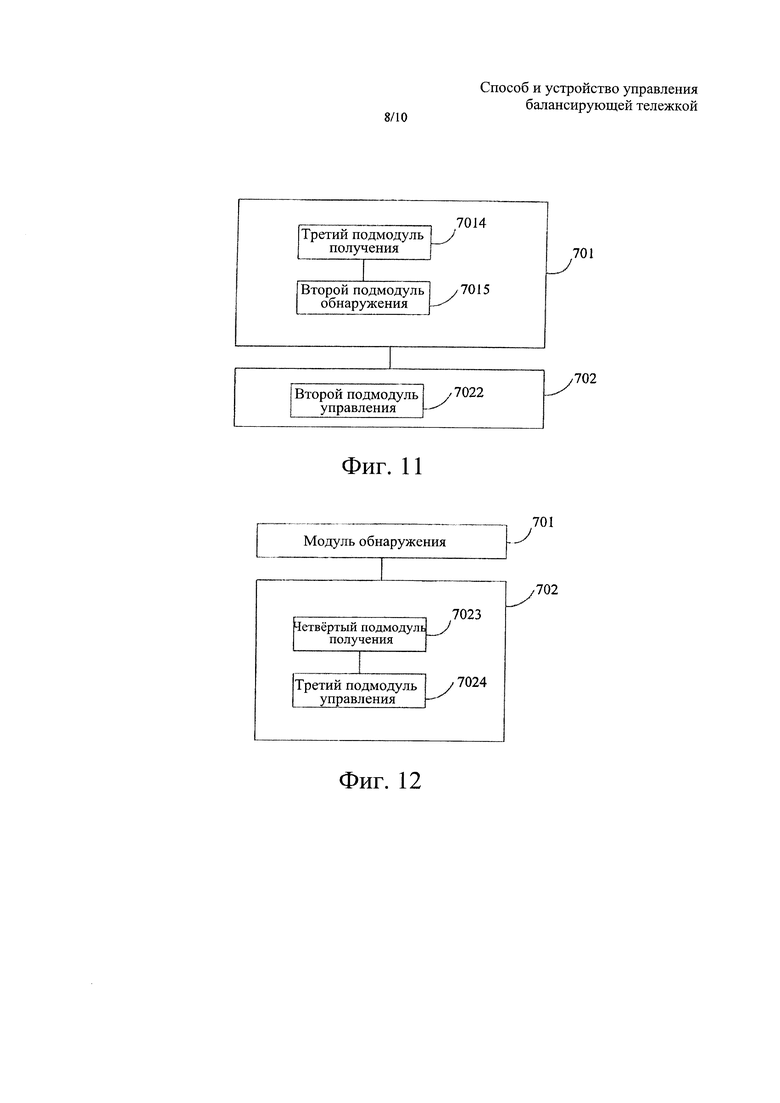
[0038] Фиг. 11 представляет структурную схему, иллюстрирующую модуль управления в соответствии с другим примером осуществления.
[0039] Фиг. 12 представляет структурную схему, иллюстрирующую модуль управления в соответствии с еще одним примером осуществления.
[0040] Фиг. 13 представляет структурную схему, иллюстрирующую модуль управления в соответствии с еще одним примером осуществления.
[0041] Фиг. 14 представляет структурную схему, иллюстрирующую устройство управления, применяемое в отношении балансирующей тележки в соответствии с примером осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0042] Далее будет приведено подробное описание вариантов осуществления, примеры которых иллюстрируются на прилагаемых чертежах. Когда прилагаемые чертежи упоминаются в последующем описании, одинаковые номера на разных чертежах представляют одинаковые или подобные элементы, если не указано иное. Реализации, изложенные в последующем описании примеров осуществления, не представляют всех реализаций в соответствии с изобретением. Напротив, они являются просто примерами устройств и способов в соответствии с аспектами, относящимися к изобретению, как оно изложено в прилагаемой формуле изобретения.
[0043] В настоящее время все больше пользователей используют балансирующую тележку вместо ходьбы. Однако управление балансирующей тележкой не разрешено в некоторых зонах в целях безопасности, поэтому пользователю может потребоваться тащить балансирующую тележку вручную, если он хочет переместить ее в какое-либо место в этих областях, что неудобно для пользователя и требует значительной физической силы.
[0044] Для того чтобы преодолеть описанные выше проблемы, варианты осуществления настоящего изобретения предлагают способ управления балансирующей тележкой. Способ может быть использован в процедуре, системе или устройстве для управления балансирующей тележкой; при этом исполнительным объектом, соответствующим способу, может быть балансирующая тележка или терминал, соединенный с балансирующей тележкой.
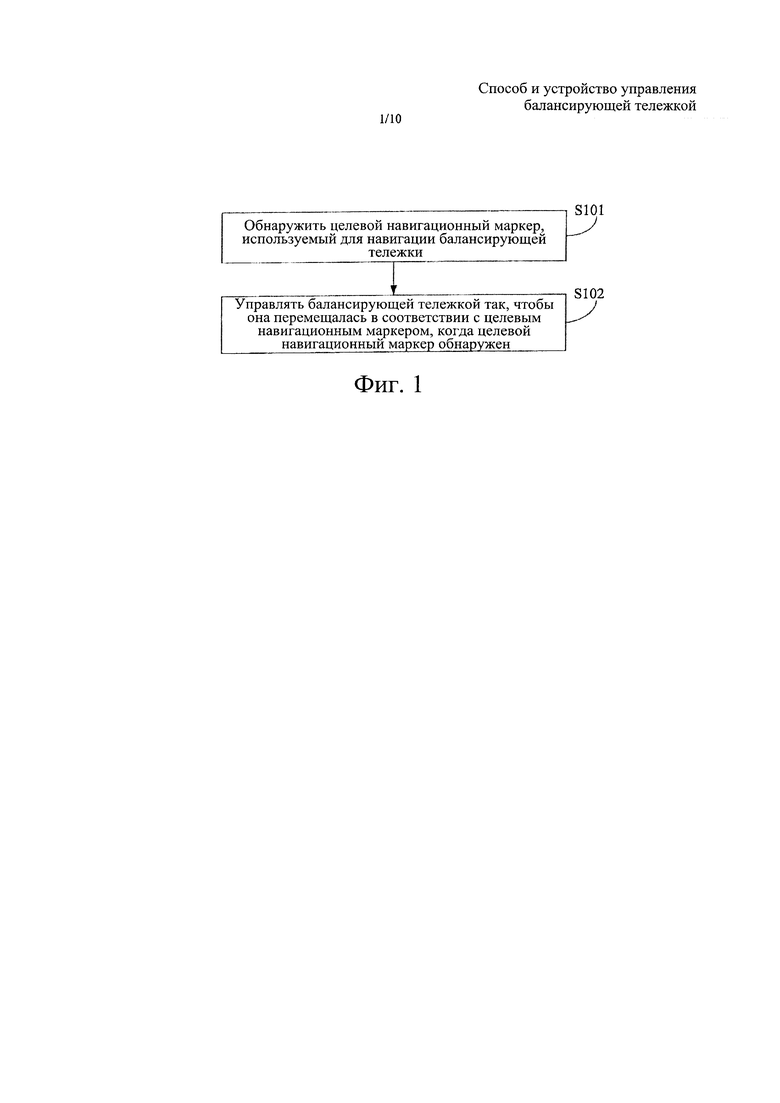
[0045] Вариант осуществления настоящего изобретения предлагает способ управления балансирующей тележкой. Фиг. 1 представляет блок-схему, иллюстрирующую способ управления балансирующей тележкой в соответствии с примером осуществления.
[0046] Как видно на фиг. 1, способ включает в себя шаги S101-S102.
[0047] На шаге S101 обнаруживают целевой навигационный маркер, используемый для навигации балансирующей тележки.
[0048] В одном варианте осуществления целевой навигационный маркер представляет собой одно или более из графического навигационного маркера, аудионавигационного маркера, видеонавигационного маркера и инфракрасного навигационного маркера и используется, чтобы указывать по меньшей мере одно из направления перемещения и скорости перемещения балансирующей тележки.
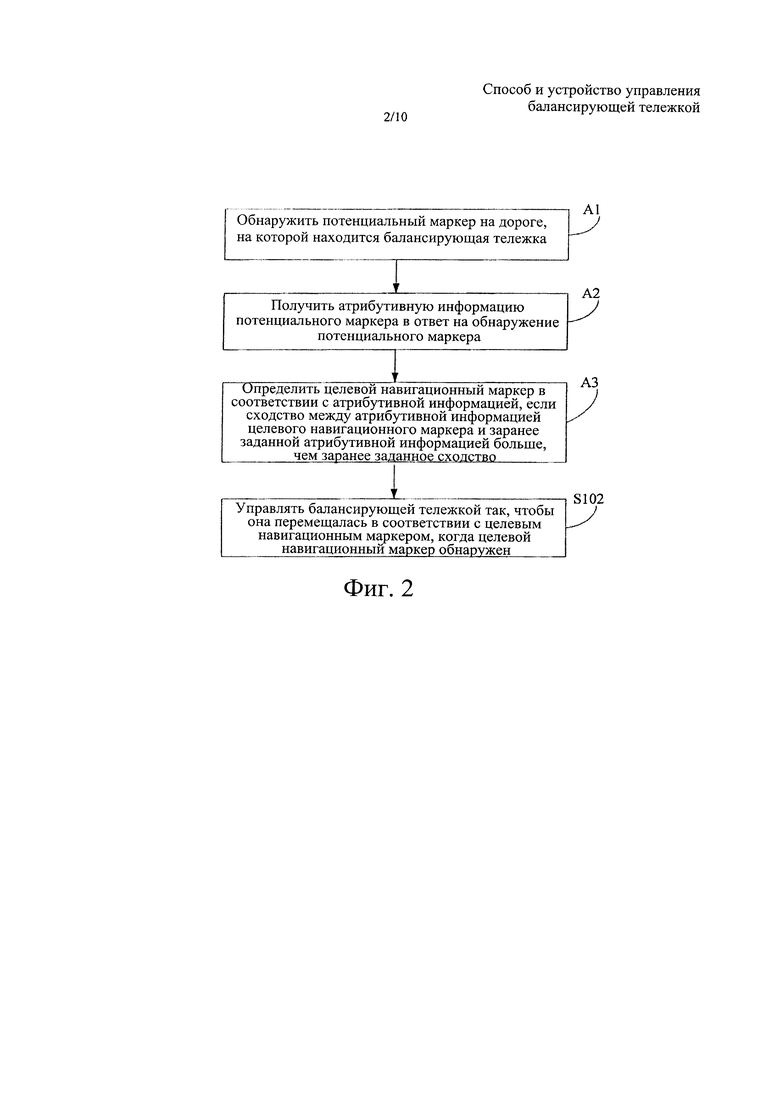
[0049] На шаге S102 балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда целевой навигационный маркер обнаружен.
[0050] Обнаруживая целевой навигационный маркер, используемый для навигации балансирующей тележкой, этой балансирующей тележкой можно управлять интеллектуальным образом, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда целевой навигационный маркер обнаружен, без необходимости для пользователя управлять балансирующей тележкой, таким образом может быть реализовано интеллектуальное управление балансирующей тележкой, и можно избежать проблемы, заключающейся в том, что пользователю необходимо вручную перетаскивать балансирующую тележку, когда он не может ехать на балансирующей тележке, и трудности для пользователя значительно уменьшаются.
[0051] Вариант осуществления настоящего изобретения предлагает способ обнаружения целевого навигационного маркера, используемого для навигации балансирующей тележки, который является дальнейшим развитием шага S101, показанного на фиг. 1.
[0052] Фиг. 2 представляет блок-схему, иллюстрирующую, как целевой навигационный маркер, используемый для навигации балансирующей тележки, обнаруживают в соответствии с примером осуществления.
[0053] Как показано на фиг. 2, осуществляют шаг S101, представленный на фиг. 1, т.е. целевой навигационный маркер, используемый для навигации балансирующей тележки, обнаруживают посредством следующих шагов.
[0054] На шаге А1 обнаруживают потенциальный маркер на дороге, на которой расположена балансирующая тележка.
[0055] Потенциальным маркером могут быть все виды маркеров, использованные на дороге, которые могут представлять навигационный маркер, например различные линии и знаки.
[0056] На шаге А2 получают атрибутивную информацию о потенциальном маркере в ответ на обнаружение потенциального маркера.
[0057] Атрибутивную информацию используют для представления всех видов атрибутов потенциальных маркеров, например заданных положения, цвета, длины и ширины.
[0058] На шаге A3 целевой навигационный маркер определяют в соответствии с атрибутивной информацией, если сходство между атрибутивной информацией целевого навигационного маркера и заранее заданной атрибутивной информацией больше, чем заранее заданное сходство. В одном варианте осуществления заранее заданная атрибутивная информация представляет собой стандартную атрибутивную информацию целевого навигационного маркера, которая задается заранее.
[0059] Некоторые мешающие объекты могут присутствовать на дороге, на которой находится балансирующая тележка, или множество навигационных маркеров с различной атрибутивной информацией может быть предоставлено на дороге. Таким образом, когда производится обнаружение целевого навигационного маркера, сначала на дороге, на которой находится балансирующая тележка, может быть обнаружен потенциальный (возможный) маркер. Искомый целевой навигационный маркер может быть определен из потенциального маркера после того, как потенциальный маркер обнаружен.
[0060] Например, возьмем в качестве примера получение желтого навигационного маркера. Обнаруживают потенциальный маркер на дороге, на которой находится балансирующая тележка. Атрибутивную информацию потенциального маркера получают в ответ на обнаружение потенциального маркера, т.е. получают цвет потенциального маркера. Определяют цветовое сходство между цветом потенциального маркера и желтым цветом, и затем потенциальный маркер с цветовым сходством большим, чем заранее заданное сходство, получают и определяют в качестве целевого навигационного маркера.
[0061] Кроме того, если имеется множество потенциальных маркеров, сходство между атрибутивной информацией которых и заранее заданной атрибутивной информацией больше, чем заранее заданное сходство, тот потенциальный маркер, атрибутивная информация которого имеет максимальное сходство с заранее заданной атрибутивной информацией среди потенциальных маркеров, может быть определен в качестве целевого навигационного маркера.
[0062] В одном варианте осуществления целевой навигационный маркер представляет собой по меньшей мере одно из графического навигационного маркера, аудионавигационного маркера, видеонавигационного маркера и инфракрасного навигационного маркера.
[0063] Целевой навигационный маркер может указывать по меньшей мере одно из направления перемещения и скорости перемещения.
[0064] Целевой навигационный маркер представляет собой по меньшей мере один из описанных выше маркеров, и, таким образом, может иметь множество видов, так что балансирующая тележка может перемещаться в соответствии с различными видами навигационный маркеров. Более того, целевой навигационный маркер может указывать по меньшей мере одно из направления перемещения и скорости перемещения, таким образом балансирующей тележкой можно управлять интеллектуальным образом, чтобы она перемещалась в соответствии с указанным направлением перемещения или указанной скоростью перемещения, и трудности для пользователя существенным образом уменьшаются.
[0065] Кроме того, скорость передвижения может быть низкой, чтобы обеспечить безопасность вождения. Если скорость передвижения меньше или равна скорости ходьбы пользователя, тележка может следовать за пользователем и перемещаться автоматически в соответствии с целевым навигационным маркером.
[0066] Вариант осуществления настоящего изобретения предлагает другой
способ обнаружения целевого навигационного маркера, используемого для навигации балансирующей тележки, который является дальнейшим развитием шага S101, показанного на фиг. 1. В этом способе целевой навигационный маркер представляет собой графический навигационный маркер, и балансирующая тележка снабжена камерой, которая может быть установлена в любом месте балансирующей тележки, например на раме балансирующей тележки.
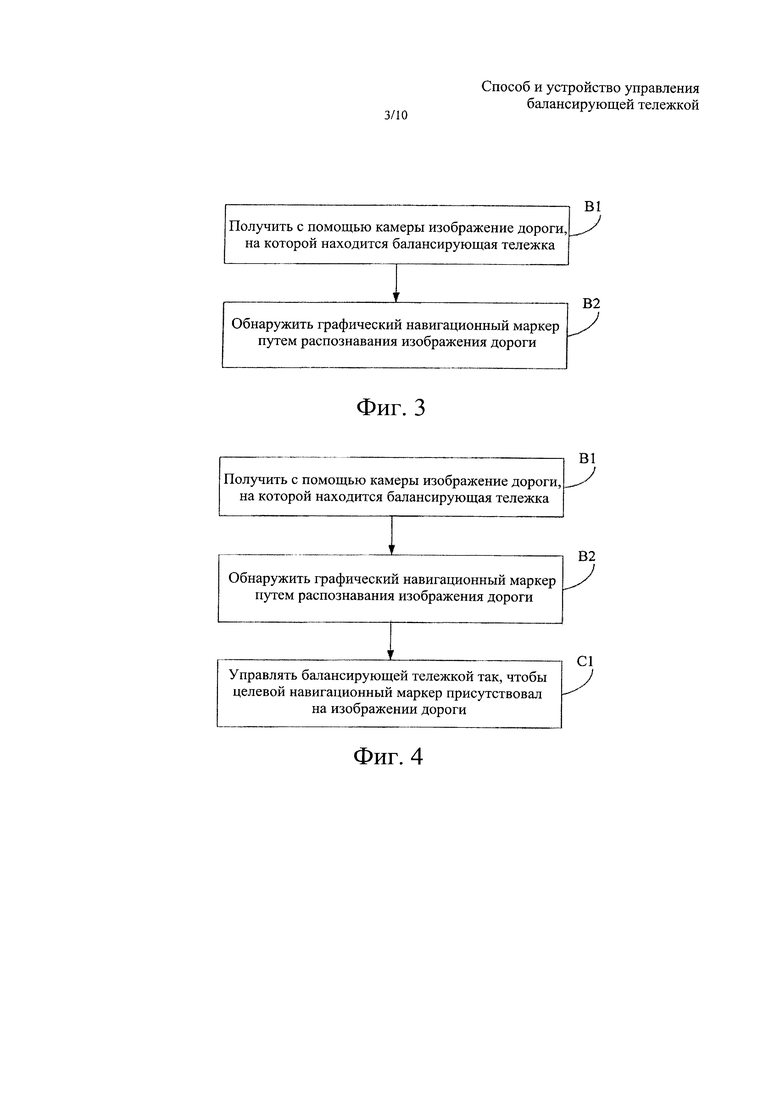
[0067] Фиг. 3 представляет блок-схему, иллюстрирующую, как целевой навигационный маркер, используемый для навигации балансирующей тележки, обнаруживают в соответствии с другим примером осуществления.
[0068] Как показано на фиг. 3, выполняют шаг S101, проиллюстрированный на фиг. 1, т.е. обнаруживают целевой навигационный маркер, используемый для навигации балансирующей тележки, посредством следующих шагов.
[0069] На шаге В1 изображение дороги, на которой находится балансирующая тележка, получают с помощью камеры.
[0070] На шаге В2 графический навигационный маркер обнаруживают путем распознавания изображения дороги.
[0071] Если целевой навигационный маркер представляет собой графический навигационный маркер и балансирующая тележка снабжена камерой, то дорога, на которой находится балансирующая тележка, может быть снята с помощью камеры, чтобы получить изображение дороги, когда получают графический навигационный маркер, и затем может быть произведено распознавание изображения дороги, таким образом графический навигационный маркер на дороге может быть точно обнаружен.
[0072] Кроме того, балансирующая тележка может также быть снабжена осветительным устройством, таким как лампа. Когда получают изображение дороги, осветительное устройство может быть включено, если текущая освещенность окружающей среды ниже, чем заранее заданная освещенность окружающей среды, таким образом, что текущая освещенность окружающей среды может быть выше или равна заранее заданной освещенности окружающей среды. Таким образом, изображение дороги с высокими разрешением и четкостью может по-прежнему быть снято при низкой освещенности окружающей среды, и это создает преимущество, заключающееся в том, что изображение дороги может быть распознано лучше, таким образом, что графический навигационный маркер может быть точно обнаружен.
[0073] В одном варианте осуществления графический навигационный маркер представляет собой по меньшей мере одно из навигационного знака на дороге, навигационного знака на дорожном указателе и навигационного знака на здании возле дороги.
[0074] Графическим навигационным маркером на дороге, на которой находится балансирующая тележка, может быть по меньшей одно из навигационного маркера на дороге, навигационного маркера на дорожном указателе возле дороги (например, с обеих сторон дороги) и навигационного маркера на здании возле дороги (например, на стене здания вдоль дороги). Графическая навигация может включать в себя навигационную линию, навигационную стрелку-указатель, знак, символы и т.п.
[0075] В одном варианте осуществления целевой навигационный маркер представляет собой навигационный знак на дороге, и этот навигационный знак на дороге представляет собой навигационную линию на дороге.
[0076] Атрибутивная информация представляет собой по меньшей мере одно из заданных положения, цвета, длины и толщины.
[0077] Навигационный знак на дороге может представлять собой навигационную линию, а атрибутивная информация может представлять собой по меньшей мере одно из заданных положения, цвета, длины и ширины, так что, когда целевой навигационный маркер определяют в соответствии с атрибутивной информацией, сходство между атрибутивной информацией и заранее заданной атрибутивной информацией может быть получено путем определения, находится ли заданное положение в границах заранее заданного положения, является ли цвет потенциального маркера таким же, как и заранее заданный цвет, превышает ли непрерывная длина потенциального маркера заранее заданную длину или превышает ли ширина потенциального маркера заранее заданную ширину, и тому подобное. Затем целевой навигационный маркер может быть точно определен в соответствии с атрибутивной информацией потенциального маркера.
[0078] Вариант осуществления настоящего изобретения предлагает способ управления балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, что является дальнейшим развитием шага S102, показанного на фиг. 1.
[0079] Выполняют шаг S102, показанный на фиг. 1, т.е. балансирующей тележкой управляют так, чтобы она перемещалась в соответствии с целевым навигационным маркером, посредством следующих шагов.
[0080] Балансирующей тележкой управляют, чтобы она перемещалась в соответствии с навигационной линией на дороге, которой могут быть навигационные линии различных цветов, проведенные заранее, например белые, черные, красные и т.п.
[0081] Когда балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером, если целевой навигационный маркер представляет собой навигационную линию на дороге, балансирующей тележкой можно управлять интеллектуальным образом, чтобы она перемещалась самостоятельно в соответствии с навигационной линией на дороге, так что навигация балансирующей тележки может осуществляться с помощью навигационной линии на дороге.
[0082] Ссылаясь на фиг. 4, фиг. 4 представляет блок-схему, иллюстрирующую, как балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером в соответствии с примером осуществления.
[0083] Как показано на фиг. 4, в этом варианте осуществления выполняют шаг S102, показанный на фиг. 1, т.е. балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером, посредством следующих шагов.
[0084] На шаге С1 балансирующей тележкой управляют так, чтобы целевой навигационный маркер присутствовал на изображении дороги.
[0085] Балансирующей тележкой можно управлять, чтобы она перемещалась в соответствии с целевым навигационным маркером так, что целевой навигационный маркер всегда присутствует на изображении дороги. Таким образом, можно гарантировать, что балансирующая тележка будет перемещаться автоматически, не отклоняясь от целевого навигационного маркера.
[0086] Кроме того, когда тележкой управляют таким образом, что целевой навигационный маркер всегда присутствует на изображении дороги, лучше управлять ею таким образом, чтобы целевой навигационный маркер всегда присутствовал в середине изображения дороги, тем самым можно по существу гарантировать, что балансирующая тележка будет перемещаться, не отклоняясь от целевого навигационного маркера.
[0087] В варианте осуществления, если целевой навигационный маркер представляет собой соответственно аудионавигационный маркер, видеонавигационный маркер и инфракрасный навигационный маркер, эти навигационные маркеры могут быть обнаружены для балансирующей тележки с помощью сигнала, посланного целевым устройством, которое может быть проводным или беспроводным устройством, связанным с балансирующей тележкой и расположенным в любом месте. Целевое устройство может взаимодействовать с балансирующей тележкой и посылать аудиосигнал, включающий в себя аудионавигационный маркер, видеосигнал, включающий в себя видеонавигационный маркер, или инфракрасный сигнал, включающий в себя инфракрасный навигационный маркер, на балансирующую тележку таким образом, что аудионавигационный маркер может быть обнаружен путем распознавания полученного аудиосигнала, видеонавигационный маркер может быть обнаружен путем распознавания полученного видеосигнала, инфракрасный навигационный маркер может быть обнаружен путем распознавания полученного инфракрасного сигнала, и затем балансирующая тележка может перемещаться в соответствии с обнаруженным аудионавигационным маркером, обнаруженным видеонавигационным маркером, обнаруженным инфракрасным навигационным маркером. Например, целевое устройство может быть расположено у дороги, на которой находится балансирующая тележка, и может посылать инфракрасный сигнал, включающий в себя инфракрасный навигационный маркер, или аудиосигнал, включающий в себя аудионавигационный маркер, на балансирующую тележку, когда обнаруживают приближающуюся балансирующую тележку, так что может быть произведено распознавание инфракрасного сигнала или аудиосигнала балансирующей тележкой, затем инфракрасный навигационный маркер или аудионавигационный маркер могут быть обнаружены, и балансирующая тележка может перемещаться в соответствии с инфракрасным навигационным маркером или аудионавигационным маркером.
[0088] Чтобы позволить пользователю узнать об этих маркерах, эти маркеры могут быть выведены с помощью звука, текста или изображения.
[0089] В одном варианте осуществления графический навигационный маркер может также быть выведен с помощью отображения изображения на устройстве.
[0090] Вариант осуществления настоящего изобретения предлагает и другой способ управления балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, что является дальнейшим развитием шага S102, показанного на фиг. 1.
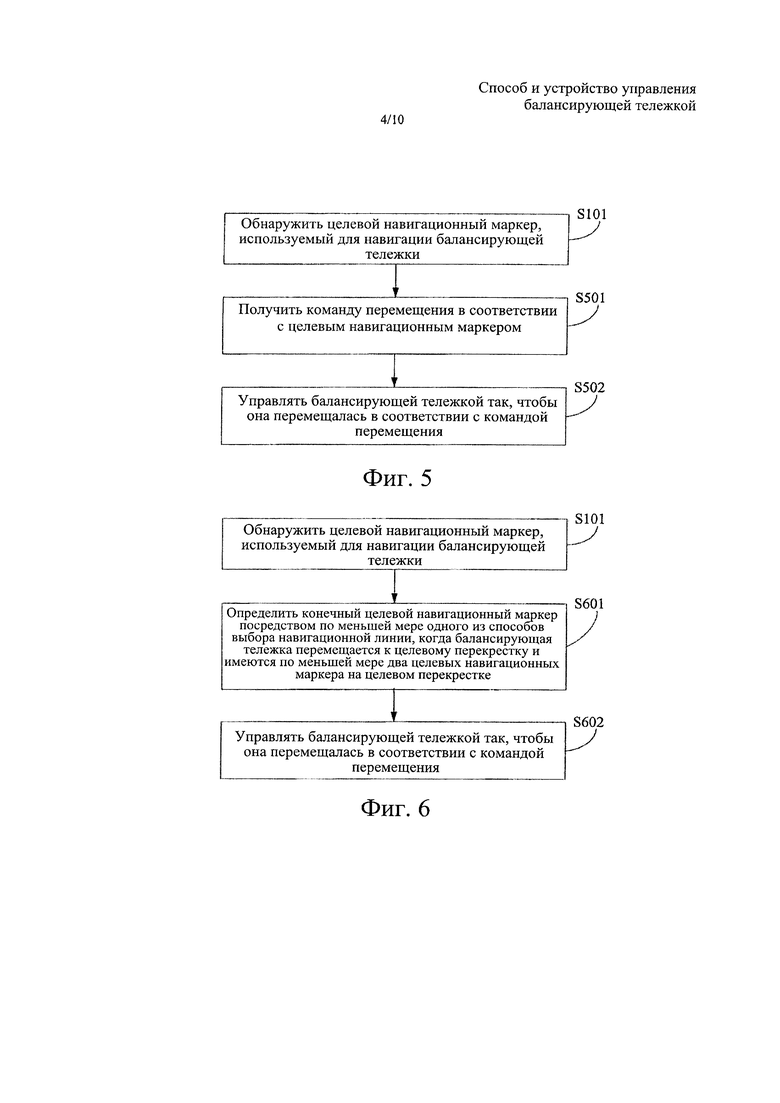
[0091] Фиг. 5 представляет блок-схему, иллюстрирующую, как балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером, в соответствии с другим примером осуществления.
[0092] Как показано на фиг. 5, выполняют шаг S102, изображенный на фиг. 1, т.е. балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером, посредством следующих шагов.
[0093] На шаге 501 получают команду перемещения в соответствии с целевым навигационным маркером.
[0094] На шаге 502 балансирующей тележкой управляют, чтобы она перемещалась в соответствии с командой перемещения, которая используется для указания по меньшей мере одного из направления перемещения и скорости перемещения балансирующей тележки.
[0095] Когда балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером, команда перемещения может быть получена в соответствии с целевым навигационным маркером, и затем балансирующей тележкой можно управлять интеллектуальным образом, чтобы она перемещалась автоматически в соответствии с командой перемещения.
[0096] В одном варианте осуществления подробный процесс получения команды перемещения осуществляют следующим образом.
[0097] Когда целевой навигационный маркер представляет собой графический навигационный маркер, команда перемещения может быть получена путем распознавания графического изображения на графическом навигационном маркере. Например, направление перемещения может быть получено путем распознавания направления, на которое указывает стрелка-указатель на графическом навигационном маркере, а скорость перемещения может быть получена путем распознавания знака ограничения скорости на графическом навигационном маркере.
[0098] Когда целевой навигационный маркер представляет собой аудионавигационный маркер, команда перемещения может быть получена путем распознавания звука аудионавигационного маркера. Например, направление перемещения может быть получено путем распознавания голосовой информации (например, голосовой информации, указывающей на поворот налево или поворот направо), используемой для указания направления в аудионавигационном маркере, посредством технологии распознавания голоса предшествующего уровня техники, а скорость перемещения может быть получена путем распознавания голосовой информации (например, максимальная скорость балансирующей тележки составляет XX метров в секунду), используемой для указания скорости в аудионавигационном маркере, посредством технологии распознавания голоса предшествующего уровня техники.
[0099] Когда целевой навигационный маркер представляет собой видеонавигационный маркер, команда перемещения может быть получена путем распознавания звука или распознавания изображения видеонавигационного маркера.
Например, направление перемещения может быть получено путем распознавания голосовой информации или изображения (например, символов, включающих указанное направление, или изображения, включающего стрелку-указатель), используемых для указания направления в видеонавигационном маркере, а скорость перемещения может быть получена путем распознавания голосовой информации или изображения (например, изображения, включающего скорость), используемых для указания скорости в видеонавигационном маркере.
[00100] Когда целевой навигационный маркер представляет собой инфракрасный навигационный маркер, команда перемещения может быть получена путем выполнения инфракрасного распознавания инфракрасного навигационного маркера. Например, направление перемещения может быть получено путем распознавания инфракрасных сигналов, используемых для указания направления в инфракрасном навигационном маркере, а скорость перемещения может быть получена путем распознавания инфракрасных сигналов, используемых для указания скорости в инфракрасном навигационном маркере.
[00101] Вариант осуществления настоящего изобретения предлагает и другой способ управления балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, что является развитием шага S102, показанного на фиг. 1.
[00102] Фиг. 6 представляет блок-схему, иллюстрирующую, как балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером, в соответствии с еще одним примером осуществления.
[00103] Как показано на фиг. 6, выполняют шаг S102, показанный на фиг. 1, т.е. балансирующей тележкой управляют, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда обнаруживают целевой навигационный маркер, посредством следующих шагов.
[00104] На шаге S601, когда балансирующая тележка движется к целевому перекрестку и имеется по меньшей мере два целевых навигационных маркера на этом целевом перекрестке, конечный целевой навигационный маркер может быть определен с помощью по меньшей мере одного из следующих способов выбора навигационной линии. В данном случае целевым перекрестком может быть любой перекресток на дороге, на которой находится балансирующая тележка.
[00105] На шаге S602 балансирующей тележкой управляют, чтобы она перемещалась в соответствии с конечным целевым навигационным маркером.
[00106] Выбор навигационной линии включает в себя следующие способы.
[00107] Конечный целевой навигационный маркер может быть определен в соответствии с заранее заданным направлением перемещения, соответствующим целевому перекрестку, которым может быть направление перемещения, устанавливаемое заранее в соответствии с местом назначения перемещения балансирующей тележки.
[00108] Когда имеется множество целевых навигационных маркеров на целевом перекрестке, для того, чтобы конечный целевой навигационный маркер мог быть определен точно в соответствии с направлением перемещения, соответствующим целевому перекрестку, целевой навигационный маркер, указывающий направление перемещения, может быть определен в качестве конечного целевого навигационного маркера. Затем балансирующей тележкой можно управлять, чтобы она перемещалась автоматически в соответствии с целевым навигационным маркером, имеющим это направление перемещения.
[00109] Альтернативно, принимают команду выбора направления перемещения, и конечный целевой навигационный маркер определяют в соответствии с командой выбора направления перемещения.
[00110] Когда имеется множество целевых навигационных маркеров на целевом перекрестке, то целевой навигационный маркер, на который пользователь рассчитывает (т.е. целевой навигационный маркер, выбранный в соответствии с командой выбора направления перемещения), может быть выбран в качестве конечного целевого навигационного маркера в соответствии с командой выбора направления перемещения. Затем балансирующая тележка может направляться с помощью целевого навигационного маркера, выбранного с помощью команды выбора направления перемещения, и двигаться автоматически в соответствии с направлением перемещения и скоростью перемещения, на которые пользователь рассчитывает.
[00111] Альтернативно, определяют, имеется ли предварительно запомненная запись ранее выбранной навигационной линии, соответствующая целевому перекрестку.
[00112] Когда имеется предварительно запомненная запись ранее выбранной навигационной линии, целевой навигационный маркер может быть определен в соответствии с этой записью ранее выбранной навигационной линии.
[00113] Когда имеется множество целевых навигационных маркеров на целевом перекрестке, для того, чтобы конечный целевой навигационный маркер мог быть определен точно, определяют, имеется ли предварительно запомненная запись ранее выбранной навигационной линии, соответствующая целевому перекрестку. Если да, то в соответствии с записью ранее выбранной навигационной линии, тот навигационный маркер, который используется чаще всего, использовался наибольшее число раз или является последним использованным, может быть определен в качестве конечного целевого навигационного маркера. Затем балансирующей тележкой управляют, чтобы она перемещалась автоматически в соответствии с наиболее часто используемым целевым навигационным маркером или последним использованным целевым навигационным маркером. Тогда балансирующей тележкой можно управлять, чтобы она перемещалась автоматически в соответствии с наиболее часто используемым целевым навигационным маркером или последним использованным целевым навигационным маркером.
[00114] Вышеупомянутые варианты могут быть осуществлены индивидуально или в комбинации.
[00115] В соответствии со способами управления балансирующей тележкой, раскрытыми в описанных выше вариантах осуществления, настоящее изобретение также предлагает устройство управления балансирующей тележкой. Фиг. 7 представляет структурную схему устройства управления балансирующей тележкой в соответствии с примером осуществления.
[00116] Как показано на фиг. 7, устройство содержит:
модуль 701 обнаружения, выполненный с возможностью обнаруживать целевой навигационный маркер, используемый для навигации балансирующей тележки; и
модуль 702 управления, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда целевой навигационный маркер обнаружен с помощью модуля 701 обнаружения.
[00117] Настоящее изобретение предлагает модуль обнаружения, который является дальнейшим развитием модуля обнаружения, показанного на фиг. 7.
[00118] Фиг. 8 представляет структурную схему, иллюстрирующую модуль обнаружения в соответствии с примером осуществления. [00119] Как видно на фиг. 8, модуль 710 обнаружения содержит:
первый подмодуль 7011 обнаружения, выполненный с возможностью обнаруживать потенциальный маркер на дороге, на которой находится балансирующая тележка;
первый подмодуль 7012 получения, выполненный с возможностью получать атрибутивную информацию потенциального маркера в ответ на обнаружение потенциального маркера с помощью первого подмодуля 7011 обнаружения; и
второй подмодуль 7013 получения, выполненный с возможностью получать целевой навигационный маркер в соответствии с атрибутивной информацией, полученной с помощью первого подмодуля 7012 получения, если сходство между атрибутивной информацией целевого навигационного маркера и заранее заданной атрибутивной информацией больше, чем заранее заданное сходство.
[00120] В одном варианте осуществления целевой навигационный маркер представляет собой по меньшей мере одно из навигационного маркера, аудионавигационного маркера, видеонавигационного маркера и инфракрасного навигационного маркера.
[00121] Целевой навигационный маркер может указывать по меньшей мере одно из направления перемещения и скорости перемещения.
[00122] Настоящее изобретение предлагает другой модуль обнаружения, который является дальнейшим развитием модуля обнаружения, показанного на фиг. 7.
[00123] Фиг. 9 представляет структурную схему, иллюстрирующую другой модуль обнаружения в соответствии с примером осуществления.
[00124] Как показано на фиг. 9, целевой навигационный маркер представляет собой графический навигационный маркер, и балансирующая тележка снабжена камерой.
[00125] Модуль 701 обнаружения, показанный на фиг. 7, содержит:
третий подмодуль 7014 получения, выполненный с возможностью получать с помощью камеры изображение дороги, на которой находится балансирующая тележка; и
второй подмодуль 7015 обнаружения, выполненный с возможностью обнаруживать графический навигационный маркер путем распознавания изображения дороги, полученного с помощью третьего подмодуля 7014 получения.
[00126] В одном варианте осуществления графический навигационный маркер может представлять собой по меньшей мере одно из навигационного знака на дороге, навигационного знака на дорожном указателе и навигационного знака на здании возле дороги.
[00127] В одном варианте осуществления целевой навигационный маркер может представлять собой навигационный знак на дороге, который включает навигационную линию на дороге.
[00128] Атрибутивная информация может включать по меньшей мере одно из заданных положения, цвета, длины и ширины.
[00129] Настоящее изобретение предлагает модуль управления, который является дальнейшим развитием модуля управления, показанного на фиг. 9.
[00130] Фиг. 10 представляет структурную схему, иллюстрирующую модуль управления в соответствии с примером осуществления.
[00131] Как показано на фиг. 10, модуль 702 управления, показанный на фиг. 9, содержит:
первый подмодуль 7021 управления, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась вдоль навигационной линии на дороге.
[00132] Настоящее изобретение предлагает и другой модуль управления, который является дальнейшим развитием модуля управления, показанного на фиг. 9.
[00133] Фиг. 11 представляет структурную схему, иллюстрирующую другой модуль управления в соответствии с другим вариантом осуществления.
[00134] Как показано на фиг. 11, модуль 702 управления, показанный на фиг. 9, содержит:
второй подмодуль 7022 управления, выполненный с возможностью управлять балансирующей тележкой так, чтобы целевой навигационный маркер присутствовал на изображении дороги, полученном с помощью третьего подмодуля получения.
[00135] Настоящее изобретение предлагает и другой модуль управления, который является дальнейшим развитием модуля управления, показанного на фиг. 9.
[00136] Фиг. 12 представляет структурную схему, иллюстрирующую еще один модуль управления в соответствии с примером осуществления.
[00137] Как показано на фиг. 12, модуль 702 управления, показанный на фиг. 9, содержит:
четвертый подмодуль 7023 получения, выполненный с возможностью получать команду перемещения в соответствии с целевым навигационным маркером, обнаруженным модулем обнаружения; и
третий подмодуль 7024 управления, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась в соответствии с командой перемещения, полученной с помощью четвертого подмодуля 7023 получения.
[00138] Настоящее изобретение предлагает и другой модуль управления, который является дальнейшим развитием модуля управления, показанного на фиг. 9.
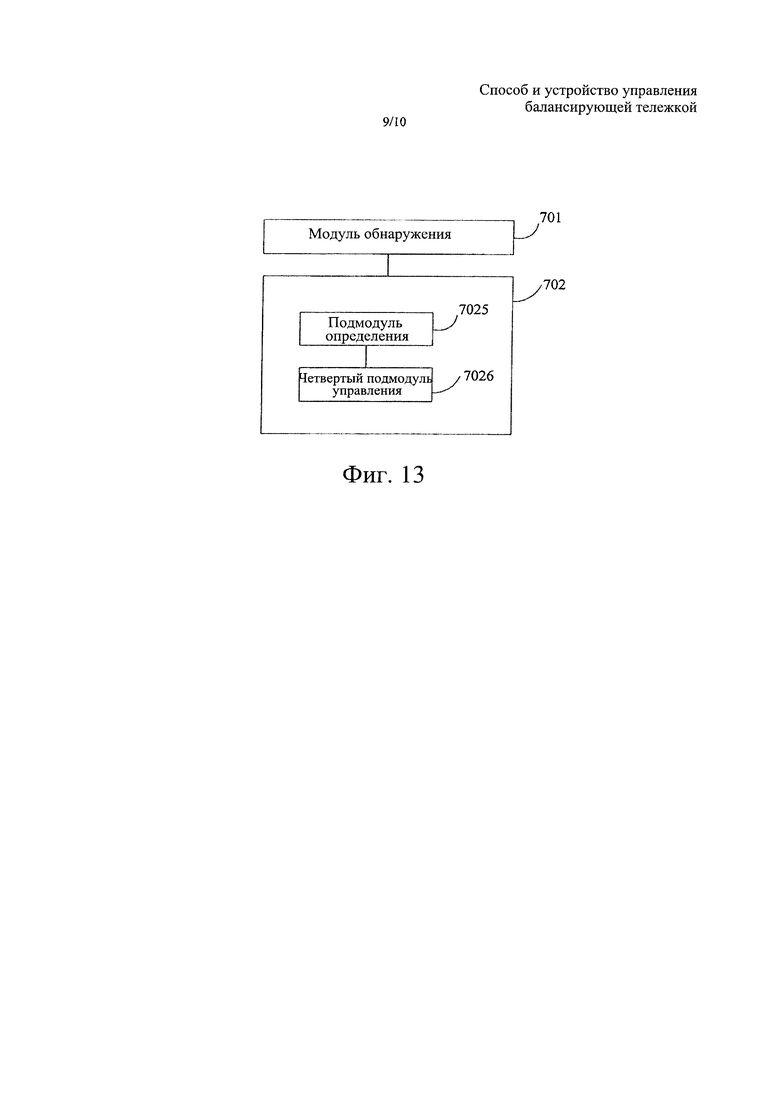
[00139] Фиг. 13 представляет структурную схему, иллюстрирующую еще один модуль управления в соответствии с примером осуществления.
[00140] Как показано на фиг. 13, модуль 702 управления, показанный на фиг. 9, содержит:
подмодуль 7025 определения, выполненный с возможностью определять конечный целевой навигационный маркер посредством по меньшей мере одного из следующих способов выбора навигационной линии, когда балансирующая тележка перемещается к целевому перекрестку и имеется по меньшей мере два целевых навигационных маркера на целевом перекрестке; и
четвертый подмодуль 7026 управления, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась в соответствии с конечным целевым навигационным маркером, определенным с помощью подмодуля 7025 определения.
[00141] Выбор навигационной линии может включать в себя следующие способы.
[00142] Конечный целевой навигационный маркер может быть определен в соответствии с заранее заданным направлением перемещения, соответствующим целевому перекрестку.
[00143] Альтернативно, может быть получена команда выбора направления перемещения, и конечный навигационный маркер может быть определен в соответствии с этой командой выбора направления перемещения.
[00144] Альтернативно, определяют, имеется ли предварительно запомненная ранее выбранная запись навигационной линии. Когда имеется предварительно запомненная запись ранее выбранной навигационной линии, конечный навигационный маркер может быть определен в соответствии с этой записью ранее выбранной навигационной линии.
[00145] В соответствии с третьим аспектом вариантов осуществления изобретения предлагается устройство управления балансирующей тележкой, которое содержит:
процессор; и
память, выполненную с возможностью хранить команду, исполняемую процессором;
где процессор выполнен с возможностью:
обнаруживать целевой навигационный маркер, используемый для навигации балансирующей тележки; и
управлять балансирующей тележкой так, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда целевой навигационный маркер обнаружен.
[00146] Описанный выше процессор, выполненный с возможностью обнаруживать целевой навигационный маркер, используемый для навигации балансирующей тележки, дополнительно выполнен с возможностью:
обнаруживать потенциальный маркер на дороге, на которой находится балансирующая тележка;
получать атрибутивную информацию потенциального маркера в ответ на обнаружение потенциального маркера; и
определять целевой навигационный маркер в соответствии с атрибутивной информацией, если сходство между атрибутивной информацией целевого навигационного маркера и заранее заданной атрибутивной информацией больше, чем заранее заданное сходство.
[00147] В одном варианте осуществления целевой навигационный маркер представляет собой по меньшей мере одно из графического навигационного маркера, аудионавигационного маркера, видеонавигационного маркера и инфракрасного навигационного маркера; и
целевой навигационный маркер указывает по меньшей мере одно из направления перемещения и скорости перемещения.
[00148] В одном варианте осуществления целевой навигационный маркер представляет собой графический навигационный маркер, балансирующая тележка снабжена камерой; и
процессор, выполненный с возможностью обнаруживать целевой навигационный маркер, используемый для навигации балансирующей тележки, дополнительно выполнен с возможностью:
получать с помощью камеры изображение дороги, на которой находится балансирующая тележка; и
обнаруживать графический навигационный маркер путем распознавания изображения дороги.
[00149] Описанный выше процессор также выполнен с возможностью:
обнаруживать графический навигационный маркер, который представляет собой по меньшей мере одно из навигационного знака на дороге, навигационного знака на дорожном указателе и навигационного знака на здании возле дороги.
[00150] В одном варианте осуществления целевой навигационный маркер представляет собой навигационный знак на дороге, при этом навигационный знак на дороге представляет собой навигационную линию на дороге; и
атрибутивная информация представляет собой по меньшей мере одно из заданных положения, цвета, длины и ширины.
[00151] Описанный выше процессор, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, дополнительно выполнен с возможностью:
управлять балансирующей тележкой, чтобы она перемещалась вдоль навигационной линии на дороге.
[00152] Описанный выше процессор, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, дополнительно выполнен с возможностью:
управлять балансирующей тележкой так, чтобы целевой навигационный маркер присутствовал на изображении дороги.
[00153] Описанный выше процессор, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, дополнительно выполнен с возможностью:
получать команду перемещения в соответствии с целевым навигационным маркером; и
управлять балансирующей тележкой, чтобы она перемещалась в соответствии с командой перемещения.
[00154] Описанный выше процессор, выполненный с возможностью управлять балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда целевой навигационный маркер обнаружен, дополнительно выполнен с возможностью:
определять конечный целевой навигационный маркер с помощью по меньшей мере одного из следующих способов выбора навигационной линии, когда балансирующая тележка перемещается к целевому перекрестку и имеются по меньшей мере два целевых навигационных маркера на целевом перекрестке; и
управлять балансирующей тележкой, чтобы она перемещалась в соответствии с конечным целевым навигационным маркером.
[00155] Выбор навигационной линии может включать в себя следующие способы.
[00156] Конечный целевой навигационный маркер может быть определен в соответствии с заранее заданным направлением перемещения, соответствующим целевому перекрестку.
[00157] Альтернативно, получают команду выбора направления перемещения, и конечный целевой навигационный маркер может быть определен в соответствии с командой выбора направления перемещения.
[00158] Альтернативно, определяют, имеется ли предварительно запомненная запись ранее выбранной навигационной линии. Когда имеется предварительно запомненная запись ранее выбранной навигационной линии, конечный целевой навигационный маркер может быть определен в соответствии с этой предварительно запомненной записью ранее выбранной навигационной линии.
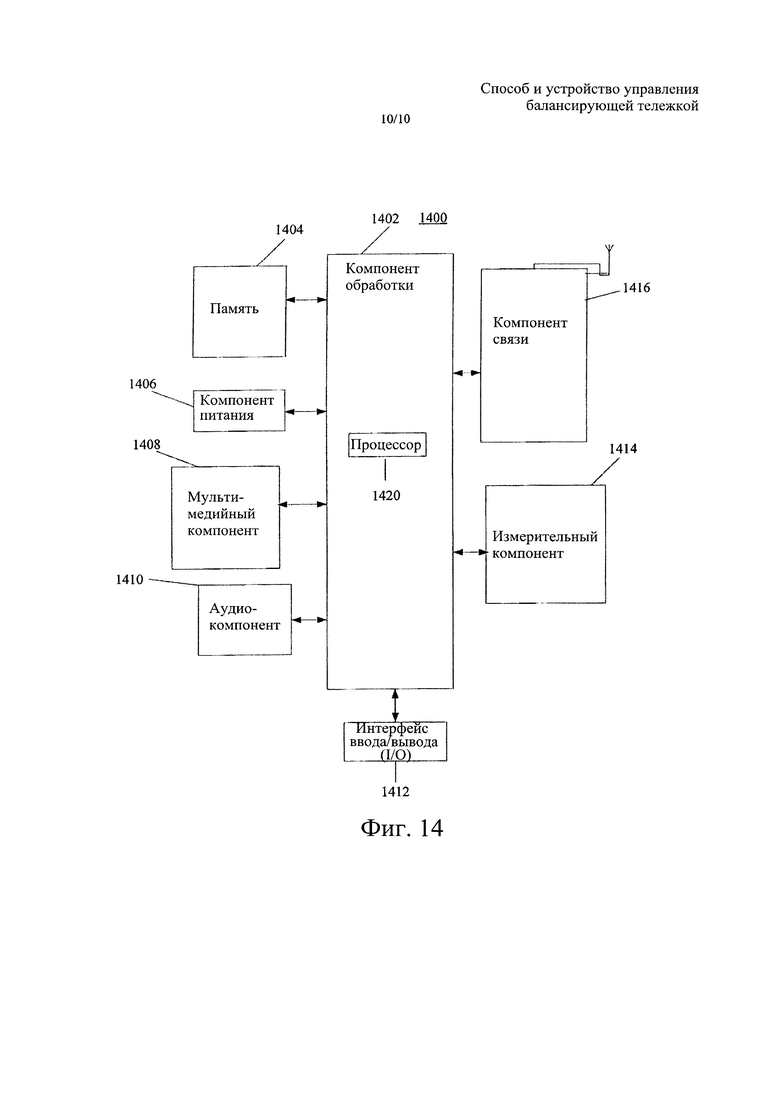
[00159] Фиг. 14 представляет структурную схему, показывающую устройство 1400 управления балансирующей тележкой в соответствии с примером осуществления, которое может быть использовано в терминальном оборудовании.
Например, устройство 1400 может быть мобильным телефоном, компьютером, цифровым широковещательным терминалом, устройством передачи сообщений, игровой консолью, планшетным компьютером, медицинским устройством, тренажером, персональным цифровым помощником и тому подобным.
[00160] Ссылаясь на фиг. 14, устройство 1400 может содержать один или более из следующих компонентов: компонент 1402 обработки, память 1404, компонент 1406 питания, мультимедийный компонент 1408, аудиокомпонент 1410, интерфейс 1412 ввода/вывода (I/O), измерительный компонент 1414 и компонент 1416 связи.
[00161] Компонент 1402 обработки, как правило, управляет всеми операциями устройства 1400, например операциями, связанными с отображением, телефонными звонками, передачей данных, операциями с камерой и операциями записи. Компонент 1402 обработки может содержать один или более процессоров 1420 для исполнения команд с целью выполнения всех или части шагов вышеуказанных способов. Более того, компонент 1402 обработки может содержать один или более модулей, которые облегчают взаимодействие между компонентом 1402 обработки и другими компонентами. Например, компонент 1402 обработки может содержать мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом 1408 и компонентом 1402 обработки.
[00162] Память 1404 выполнена с возможностью запоминать различные виды данных для поддержки работы устройства 1400. Примеры таких данных включают в себя команды для любых приложений или способов, реализуемых на устройстве 1400, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.д. Память 1404 может быть выполнена с использованием любого вида энергозависимых или энергонезависимых запоминающих устройств или их комбинации, таких как статическое оперативное запоминающее устройство (static random access memory) (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (electrically erasable programmable read-only memory) (EEPROM), стираемое программируемое постоянное запоминающее устройство (erasable programmable read-only memory) (EPROM), программируемое постоянное запоминающее устройство (programmable read-only memory) (PROM), постоянное запоминающее устройство (read-only memory) (ROM), магнитная память, флэш-память, магнитный или оптический диск.
[00163] Компонент 1406 питания обеспечивает питанием различные компоненты устройства 1400. Компонент 1406 питания может включать в себя систему управления питанием, один или более источников питания и любые другие компоненты, связанные с производством, управлением и распределением энергии в устройстве 1400.
[00164] Мультимедийный компонент 1408 включает в себя экран, создающий выходной интерфейс между устройством 1400 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (liquid crystal display) (LCD) и сенсорную панель (touch panel) (TP). Если экран включает в себя сенсорную панель, то этот экран может быть реализован в виде сенсорного экрана для приема входных сигналов от пользователя. Сенсорная панель содержит один или более датчиков касания для восприятия касаний, скольжений и жестов на сенсорной панели. Датчики касания могут не только воспринимать границу действия касания или скольжения, но и измерять период времени и давление, связанные с действием касания или скольжения. В некоторых вариантах осуществления мультимедийный компонент 1408 содержит переднюю и/или заднюю камеру. Передняя камера и задняя камера могут принимать внешние мультимедийные данные, в то время как устройство 1400 находится в рабочем режиме, например режиме фотографирования или видеорежиме. Каждая из передней камеры и задней камеры может быть системой с фиксированными оптическими линзами или иметь способность к фокусировке и оптическому увеличению.
[00165] Аудиокомпонент 1410 выполнен с возможностью выводить и/или вводить аудиосигналы. Например, аудиокомпонент 1410 включает в себя микрофон ("MIC"), выполненный с возможностью принимать внешний аудиосигнал, когда устройство 1400 находится в режиме работы, например режиме вызова, режиме записи и режиме распознавания голоса. Полученный аудиосигнал может быть далее запомнен в памяти 1404 или передан посредством компонента 1416 связи. В некоторых вариантах осуществления аудиокомпонент 1410 дополнительно включает в себя динамик для вывода аудиосигналов.
[00166] Интерфейс 1412 ввода/вывода предлагает интерфейс между компонентом 802 обработки и периферийными интерфейсными модулями, например клавиатурой, колесом прокрутки, кнопками и т.п. Кнопки могут включать в себя, но не ограничиваются этим, кнопку «домой», кнопку громкости, пусковую кнопку и кнопку блокировки.
[00167] Измерительный компонент 1414 содержит один или более датчиков, выполненных с возможностью обеспечивать оценку состояния различных аспектов устройства 1400. Например, измерительный компонент 1414 может детектировать открытое/закрытое состояние устройства 1400, относительное расположение компонентов, например дисплея и малой клавиатуры, устройства 1400, изменение в положении устройства 1400 или компонента устройства 1400, наличие или отсутствие контакта между пользователем и устройством 1400, ориентацию или ускорение/замедление устройства 1400, и изменение температуры устройства 1400. Измерительный компонент 1414 может представлять собой датчик близости, выполненный с возможностью обнаруживать присутствие близлежащих объектов без какого-либо физического контакта. Измерительный компонент 1414 может также представлять собой датчик света, например датчик изображения на структуре комплементарный металл-оксид-полупроводник (Complementary Metal Oxide Semiconductor) (CMOS, КМОП) или приборе с зарядовой связью (Charge Coupled Device) (CCD, ПЗС), для использования в применении, связанном с изображением. В некоторых вариантах осуществления измерительный компонент 1414 может также представлять собой акселерометрический датчик, гироскопический датчик, магнитный датчик, датчик давления или датчик температуры.
[00168] Компонент 1416 связи выполнен с возможностью содействовать связи, проводной или беспроводной, между устройством 1400 и другими устройствами. Устройство 1400 может получить доступ к беспроводной сети на основе стандарта связи, например беспроводного интернета (WiFi), сети 2-го поколения (2G) или 3-го поколения (3G), или их комбинации. В одном примере осуществления компонент 1416 связи принимает широковещательный сигнал или связанную с широковещанием информацию из внешней системы управления широковещанием через широковещательный канал. В одном примере осуществления компонент 1416 связи дополнительно содержит модуль коммуникации ближнего поля (Near Field Communication) (NFC) для облегчения коммуникации ближнего радиуса действия. Например, NFC-модуль может быть реализован на основе технологии радиочастотной идентификации (Radio Frequency Identification) (RFID), технологии Ассоциации по инфракрасной технологии передачи данных (Infrared Data Association) (IrDA), технологии сверхширокополосной передачи данных (Ultra-WideBand) (UWB), технологии Bluetooth (ВТ) и других технологий.
[00169] В примерах осуществления устройство 1400 может быть реализовано с помощью одной или более специализированных интегральных схем (Application Specific Integrated Circuits) (ASICs), цифровых сигнальных процессоров (Digital Signal Processors) (DSPs), устройств цифровой обработки сигналов (Digital Signal Processing Devices) (DSPDs), программируемых логических устройств (Programmable Logic Devices) (PLDs), программируемых вентильных матриц (Field Programmable Gate Arrays) (FPGAs), контроллеров, микроконтроллеров, микропроцессоров или других электронных элементов для выполнения вышеописанных способов. [00170] В примерах осуществления также предлагается машиночитаемый носитель данных, содержащий команды, например находящиеся в памяти 1404, исполняемые процессором 1420 в устройстве 1400 для выполнения описанных выше способов. Например, машиночитаемым носителем может быть ПЗУ (ROM), ОЗУ (RAM), компакт-диск (Compact Disc Read-Only Memory) (CD-ROM), магнитная лента, гибкий диск, оптическое устройство для хранения информации и тому подобное. [00171] Когда команды, хранимые на носителе данных, исполняются процессором 1400, устройство 1400 имеет возможность выполнять способ управления балансирующей тележкой, включающий в себя:
обнаружение целевого навигационного маркера, используемого для навигации балансирующей тележки; и управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда целевой навигационный маркер обнаружен.
[00172] В одном варианте осуществления обнаружение целевого навигационного маркера, используемого для навигации балансирующей тележки, включает в себя:
обнаружения потенциального маркера на дороге, на которой находится балансирующая тележка;
получение атрибутивной информации потенциального маркера в ответ на обнаружение потенциального маркера; и
определение целевого навигационного маркера в соответствии с атрибутивной информацией, если сходство между атрибутивной информацией целевого навигационного маркера и заранее заданной атрибутивной информации больше, чем заранее заданное сходство.
[00173] В одном варианте осуществления целевой навигационный маркер представляет собой по меньшей мере одно из графического навигационного маркера, аудионавигационного маркера, видеонавигационного маркера и инфракрасного навигационного маркера; и
целевой навигационный маркер указывает по меньшей мере одно из направления перемещения и скорости перемещения.
[00174] В одном варианте осуществления целевой навигационный маркер представляет собой графический навигационный маркер, балансирующая тележка снабжена камерой; и
обнаружение целевого навигационного маркера, используемого для навигации балансирующей тележки, включает в себя:
получение с помощью камеры изображения дороги, на которой находится балансирующая тележка; и
обнаружение графического навигационного маркера путем распознавания изображения дороги.
[00175] В одном варианте осуществления графический навигационный маркер представляет собой по меньшей мере одно из навигационного знака на дороге, навигационного знака на дорожном указателе и навигационного знака на здании возле дороги.
[00176] В одном варианте осуществления целевой навигационный маркер представляет собой навигационный знак на дороге, при этом навигационный знак на дороге представляет собой навигационную линию на дороге; и
атрибутивная информация представляет собой по меньшей мере одно из заданных положения, цвета, длины и ширины.
[00177] В одном варианте осуществления управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, включает в себя:
управление балансирующей тележкой, чтобы она перемещалась по навигационной линии на дороге.
[00178] В варианте осуществления управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, включает в себя:
управление балансирующей тележкой так, чтобы целевой навигационный маркер присутствовал на изображении дороги.
[00179] В одном варианте осуществления управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, включает в себя:
получение команды перемещения в соответствии с целевым навигационным маркером; и
управление балансирующей тележкой, чтобы она перемещалась в соответствии с командой перемещения.
[00180] В одном варианте осуществления управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда целевой навигационный маркер обнаружен, включает в себя:
определение конечного целевого навигационного маркера с помощью по меньшей мере одного из следующих способов выбора навигационной линии, когда балансирующая тележка перемещается к целевому перекрестку и имеются по меньшей мере два целевых навигационных маркера на целевом перекрестке; и
управление балансирующей тележкой, чтобы она перемещалась в соответствии с конечным целевым навигационным маркером.
[00181] Выбор навигационной линии может включать в себя следующие способы:
конечный целевой навигационный маркер определяют в соответствии с заранее заданным направлением перемещения, соответствующим целевому перекрестку; или
команду выбора направления перемещения принимают, и конечный целевой навигационный маркер может быть определен в соответствии с командой выбора направления перемещения; или
определяют, имеется ли предварительно запомненная запись ранее выбранной навигационной линии; когда имеется предварительно запомненная запись ранее выбранной навигационной линии, конечный целевой навигационный маркер может быть определен в соответствии с этой записью ранее выбранной навигационной линии.
[00182] Другие варианты осуществления изобретения будут очевидны для специалистов в данной области из рассмотрения описания и практического применения изобретения, раскрытого в настоящем документе. Настоящее описание предназначено для охвата любых вариантов, применений или адаптаций изобретения, следующих его общим принципам и включающих в себя такие отклонения от настоящего изобретения, которые попадают в границы известной или обычной практики в данной области. Предполагается, что описание и примеры следует рассматривать только как иллюстративные, с истинными объемом и сущностью, которые указаны в формуле изобретения.
[00183] Следует понимать, что настоящее изобретение не ограничено точной конструкцией, которая была описана выше и показана на прилагаемых чертежах, и что различные модификации и изменения могут быть сделаны в объеме настоящего изобретения. Предполагается, что объем настоящего изобретения ограничивается только прилагаемой формулой изобретения.
Группа изобретений относится к области управления транспортом, в частности к способам управления балансирующей тележкой. Способ управления балансирующей тележкой включает в себя обнаружение целевого навигационного маркера, управление балансирующей тележкой в соответствии маркером. Устройство управления балансирующей тележкой по первому варианту содержит модуль обнаружения и модуль управления. Устройство управления балансирующей тележкой по второму варианту содержит процессор и память, выполненную с возможностью хранить команду, исполняемую процессором. Процессор конфигурирован для выполнения способа управления балансирующей тележкой. Достигается автоматизация перемещения тележки. 3 н. и 16 з.п. ф-лы, 14 ил.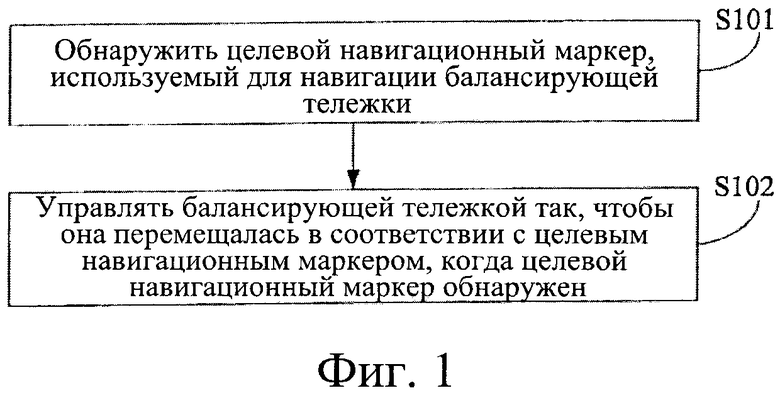
1. Способ управления балансирующей тележкой, который включает в себя:
обнаружение целевого навигационного маркера, используемого для навигации балансирующей тележки; и
управление балансирующей тележкой так, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда целевой навигационный маркер обнаружен,
при этом, когда имеется множество целевых навигационных маркеров на целевом перекрестке, определяют, имеется ли предварительно запомненная запись о предыдущем выборе, соответствующая целевому перекрестку, и если да, то в соответствии с этой записью навигационный маркер, который использовался чаще всего, или использовался наибольшее число раз, или является последним использованным, определяют в качестве целевого навигационного маркера для перемещения.
2. Способ по п. 1, отличающийся тем, что обнаружение целевого навигационного маркера, используемого для навигации балансирующей тележки, включает в себя:
обнаружение потенциального маркера на дороге, на которой находится балансирующая тележка;
получение атрибутивной информации потенциального маркера в ответ на обнаружение потенциального маркера; и
определение целевого навигационного маркера в соответствии с атрибутивной информацией, если сходство между атрибутивной информацией целевого навигационного маркера и заранее заданной атрибутивной информацией больше, чем заранее заданное сходство.
3. Способ по п. 2, отличающийся тем, что целевой навигационный маркер представляет собой по меньшей мере одно из графического навигационного маркера, аудионавигационного маркера, видеонавигационного маркера и инфракрасного навигационного маркера; и
целевой навигационный маркер указывает по меньшей мере одно из направления перемещения и скорости перемещения.
4. Способ по п. 3, отличающийся тем, что целевой навигационный маркер представляет собой графический навигационный маркер, балансирующая тележка снабжена камерой; и
обнаружение целевого навигационного маркера, используемого для навигации балансирующей тележки, включает в себя:
получение с помощью камеры изображения дороги, где находится балансирующая тележка; и
определение графического навигационного маркера путем распознавания изображения дороги.
5. Способ по п. 3, отличающийся тем, что графический навигационный маркер представляет собой по меньшей мере одно из навигационного знака на дороге, навигационного знака на дорожном указателе и навигационного знака на здании возле дороги.
6. Способ по п. 5, отличающийся тем, что целевой навигационный маркер представляет собой навигационный знак на дороге, при этом навигационный знак на дороге содержит навигационную линию на дороге; и
атрибутивная информация представляет собой по меньшей мере одно из заданных положения, цвета, длины и ширины.
7. Способ по п. 6, отличающийся тем, что управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, включает в себя:
управление балансирующей тележкой так, чтобы она перемещалась вдоль навигационной линии на дороге.
8. Способ по любому из пп. 4-7, отличающийся тем, что управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, включает в себя:
управление балансирующей тележкой так, чтобы целевой навигационный маркер присутствовал на изображении дороги.
9. Способ по п. 1, отличающийся тем, что управление балансирующей тележкой, чтобы она перемещалась в соответствии с целевым навигационным маркером, включает в себя:
получение команды перемещения в соответствии с целевым навигационным маркером; и
управление балансирующей тележкой, чтобы она перемещалась в соответствии с командой перемещения.
10. Устройство управления балансирующей тележкой, содержащее:
модуль обнаружения, выполненный с возможностью обнаруживать целевой навигационный маркер, используемый для навигации балансирующей тележки; и
модуль управления, выполненный с возможностью управлять балансирующей тележкой так, чтобы она перемещалась в соответствии с целевым навигационным маркером, когда целевой навигационный маркер обнаружен с помощью модуля обнаружения,
при этом, когда имеется множество целевых навигационных маркеров на целевом перекрестке, модуль управления определяет, имеется ли предварительно запомненная запись о предыдущем выборе, соответствующая целевому перекрестку, и если да, то в соответствии с этой записью модуль управления определяет навигационный маркер, который использовался чаще всего, или использовался наибольшее число раз, или является последним использованным, в качестве целевого навигационного маркера для перемещения.
11. Устройство по п. 10, отличающееся тем, что модуль обнаружения содержит:
первый подмодуль обнаружения, выполненный с возможностью обнаруживать потенциальный маркер на дороге, на которой находится балансирующая тележка;
первый подмодуль получения, выполненный с возможностью получать атрибутивную информацию потенциального маркера в ответ на обнаружение потенциального маркера с помощью первого подмодуля обнаружения; и
второй подмодуль получения, выполненный с возможностью получать целевой навигационный маркер в соответствии с атрибутивной информацией, полученной с помощью первого подмодуля получения, если сходство между атрибутивной информацией целевого навигационного маркера и заранее заданной атрибутивной информации больше, чем заранее заданное сходство.
12. Устройство по п. 11, отличающееся тем, что целевой навигационный маркер представляет собой по меньшей мере одно из графического навигационного маркера, аудионавигационного маркера, видеонавигационного маркера и инфракрасного навигационного маркера; и
целевой навигационный маркер указывает по меньшей мере одно из направления перемещения и скорости перемещения.
13. Устройство по п. 12, отличающееся тем, что целевой навигационный маркер представляет собой графический навигационный маркер, балансирующая тележка снабжена камерой; и
модуль обнаружения содержит:
третий подмодуль получения, выполненный с возможностью получать с помощью камеры изображение дороги, на которой находится балансирующая тележка; и
второй подмодуль обнаружения, выполненный с возможностью обнаруживать графический навигационный маркер путем распознавания изображения дороги, полученного с помощью третьего подмодуля получения.
14. Устройство по п. 13, отличающееся тем, что графический навигационный маркер представляет собой по меньшей мере одно из навигационного знака на дороге, навигационного знака на дорожном указателе и навигационного знака на здании возле дороги.
15. Устройство по п. 14, отличающееся тем, что целевой навигационный маркер представляет собой навигационный знак на дороге, при этом навигационный знак на дороге содержит навигационную линию на дороге; и
атрибутивная информация представляет собой по меньшей мере одно из заданных положения, цвета, длины и ширины.
16. Устройство по п. 15, отличающееся тем, что модуль управления содержит:
первый подмодуль управления, выполненный с возможностью управлять балансирующей тележкой так, чтобы она перемещалась вдоль навигационной линии на дороге.
17. Устройство по любому из пп. 13-16, отличающееся тем, что модуль управления содержит:
второй подмодуль управления, выполненный с возможностью управлять балансирующей тележкой так, чтобы целевой навигационный маркер присутствовал на изображении дороги, полученном с помощью третьего подмодуля получения.
18. Устройство по п. 10, отличающееся тем, что модуль управления содержит:
четвертый подмодуль получения, выполненный с возможностью получать команду перемещения в соответствии с целевым навигационным маркером, обнаруженным модулем обнаружения; и
третий подмодуль управления, выполненный с возможностью управлять балансирующей тележкой так, чтобы она перемещалась в соответствии с командой перемещения, полученной с помощью четвертого подмодуля получения.
19. Устройство управления балансирующей тележкой, содержащее:
процессор; и
память, выполненную с возможностью хранить команду, исполняемую процессором;
при этом процессор конфигурирован для выполнения способа по п. 1.
| CN 105810007 A, 27.07.2016 | |||
| CN 105352521 A, 24.02.2016 | |||
| ТРАНСПОРТНАЯ СИСТЕМА С НАПРАВЛЯЮЩИМИ ПУТЯМИ И СПОСОБ УПРАВЛЕНИЯ ТЕЛЕЖКАМИ ТАКОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2003 |
|
RU2337034C2 |

