Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения относятся к устройству для обработки отправлений.
Настоящая заявка притязает на приоритет патентной заявки Японии № 2016-109519, поданной 21 мая 2016, содержание которой полностью включено в данный документ по ссылке.
Предпосылки создания изобретения
Устройство для обработки отправлений, используемое поставщиком почтовых услуг или подобным, выполняет процесс определения участка назначения отправления на основании пункта назначения, обозначенного на объекте отправления, или тому подобного, и перемещения объекта отправления к накопителю, соответствующему участку назначения отправления.
В последнее время увеличивается использование объектов отправления, упакованных в упаковки в форме сумки, выполненные из пластика.
В обычных устройствах для обработки отправлений существует возможность обтирания упаковки из-за скольжения по поверхности маршрута перемещения во время перемещения объекта отправления.
Краткое описание чертежей
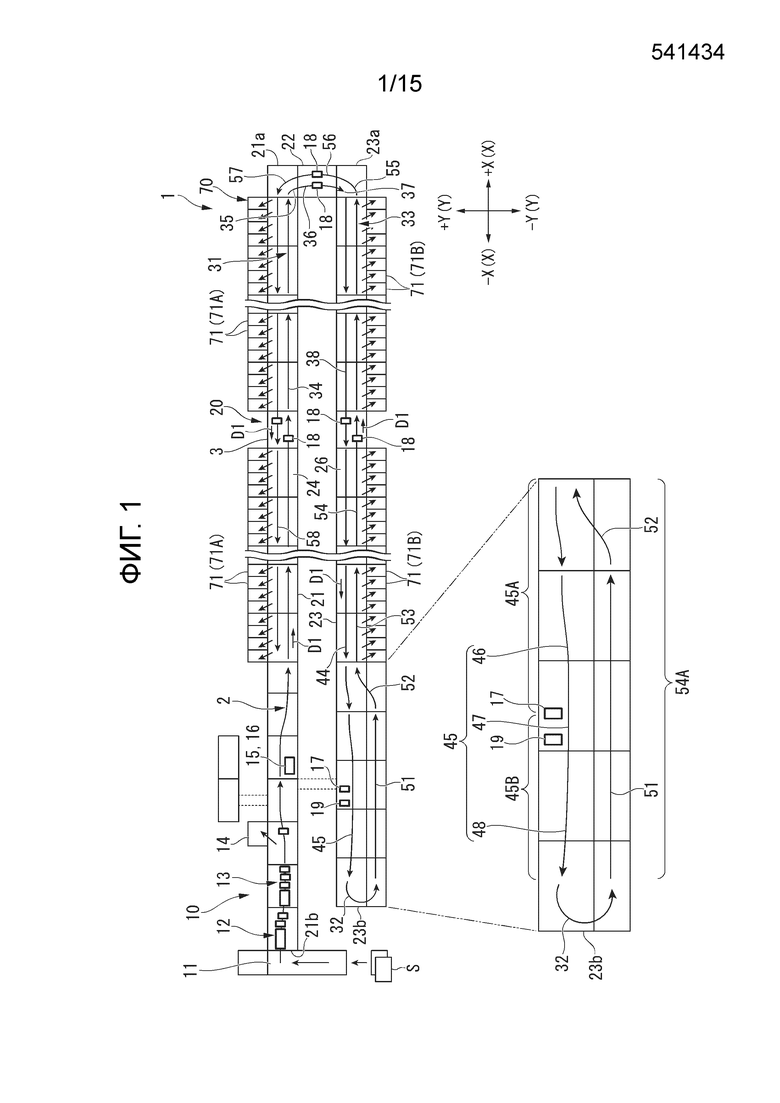
Фиг.1 представляет собой вид в плане, на котором схематично показана конфигурация устройства для обработки отправлений согласно варианту осуществления.
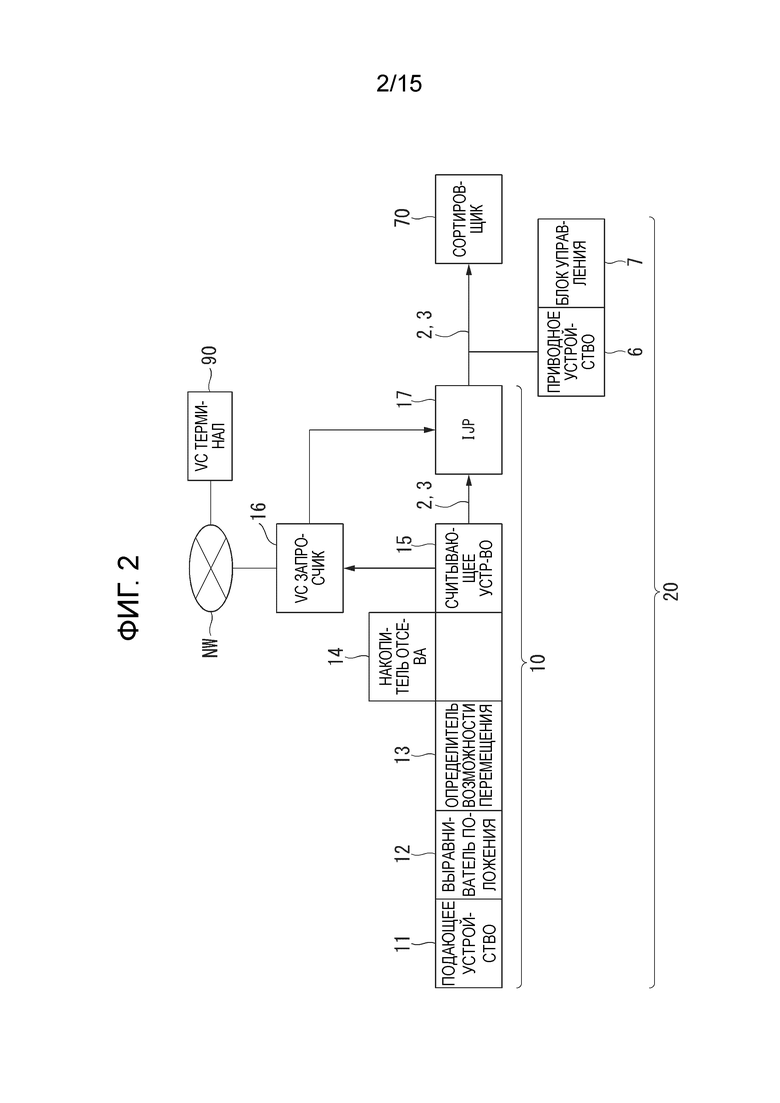
Фиг.2 представляет собой блок-схему, на которой показана схематичная конфигурация сортирующего процессора предварительной обработки.
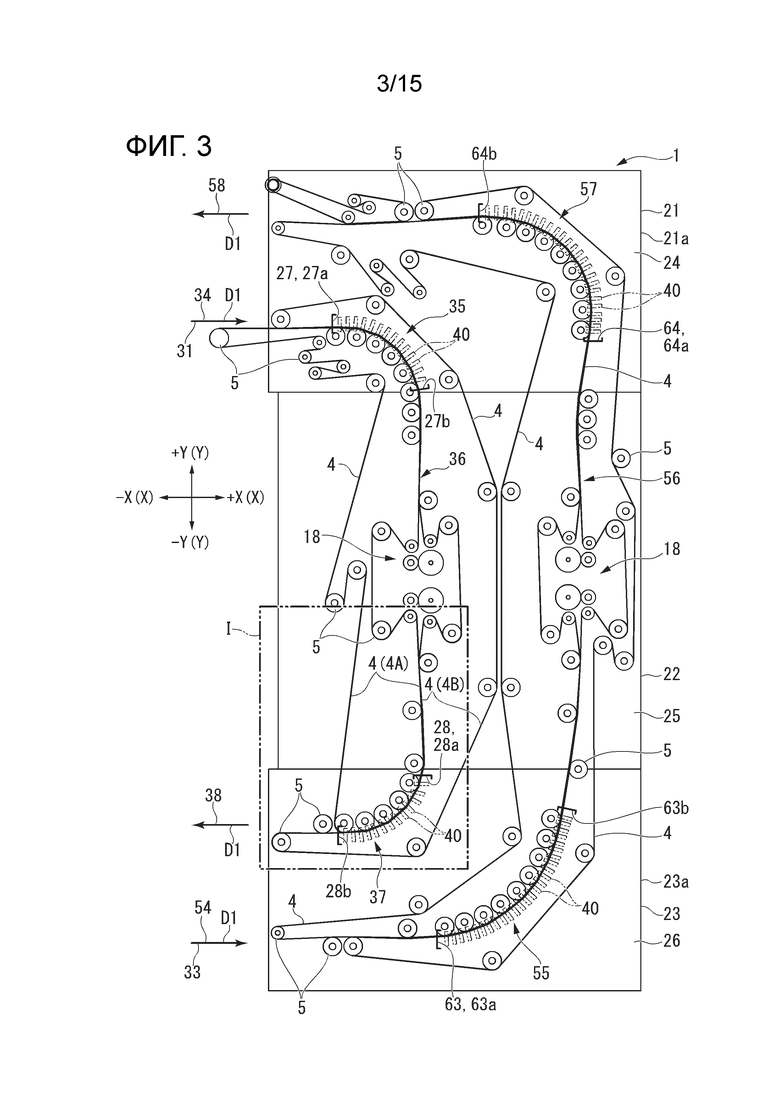
Фиг.3 представляет собой вид в плане, на котором показана часть конфигурации перемещающего механизма.
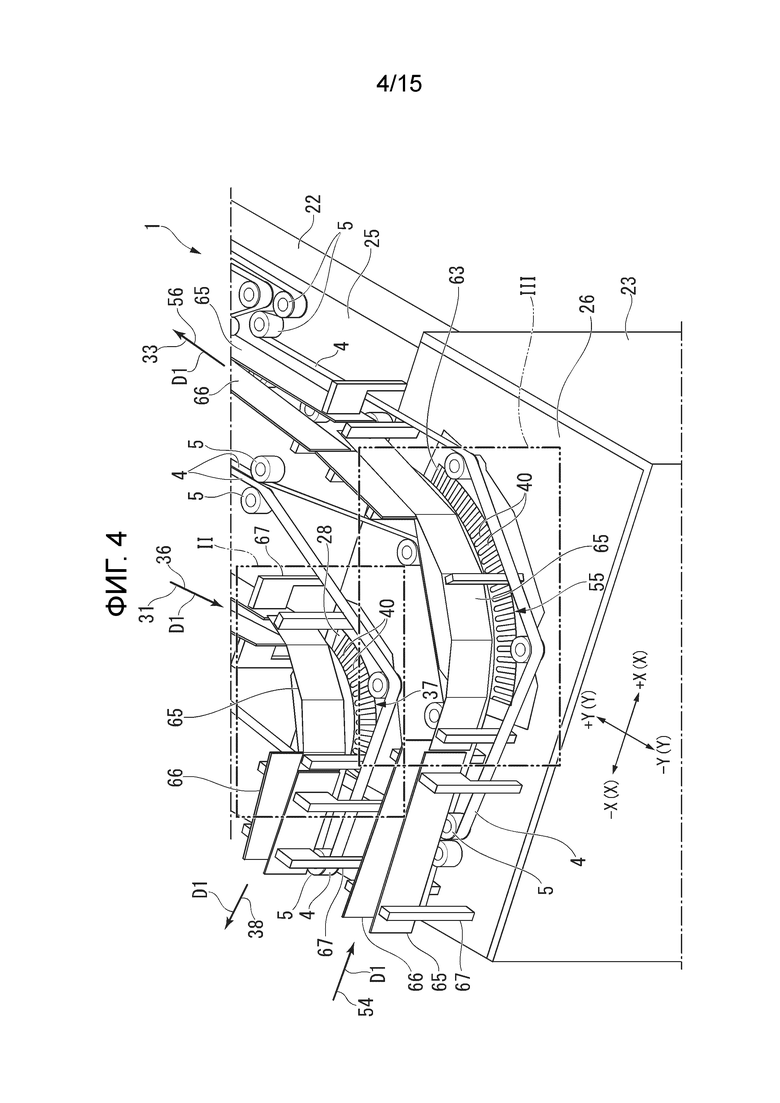
Фиг.4 представляет собой вид в перспективе, на котором показана часть конфигурации перемещающего механизма.
Фиг.5 представляет собой вид в перспективе, на котором показана конфигурация пути изменения направления в части I на Фиг.3 (часть II на Фиг.4).
Фиг.6 представляет собой вид в перспективе, на котором показан пример конвейерного ролика.
Фиг.7 представляет собой вид в плане, на котором схематично показана конфигурация пути изменения направления в части I на Фиг.3.
Фиг.8 представляет собой вид сбоку, на котором схематично показана конфигурация пути изменения направления.
Фиг.9 представляет собой вид сбоку, на котором схематично показана конфигурация части пути изменения направления.
Фиг.10 представляет собой вид сбоку, на котором схематично показана конфигурация части пути изменения направления.
Фиг.11 представляет собой вид сбоку, на котором схематично показана конфигурация части пути изменения направления.
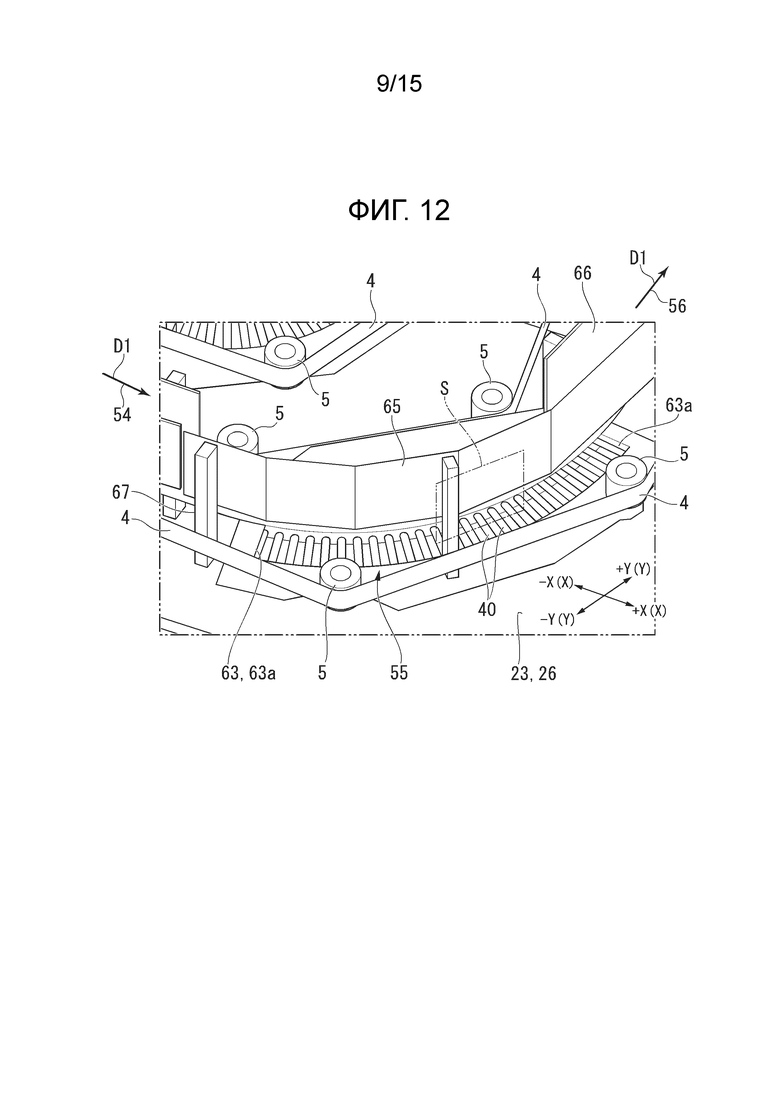
Фиг.12 представляет собой вид в перспективе, на котором показана конфигурация пути изменения направления в части III на Фиг.4.
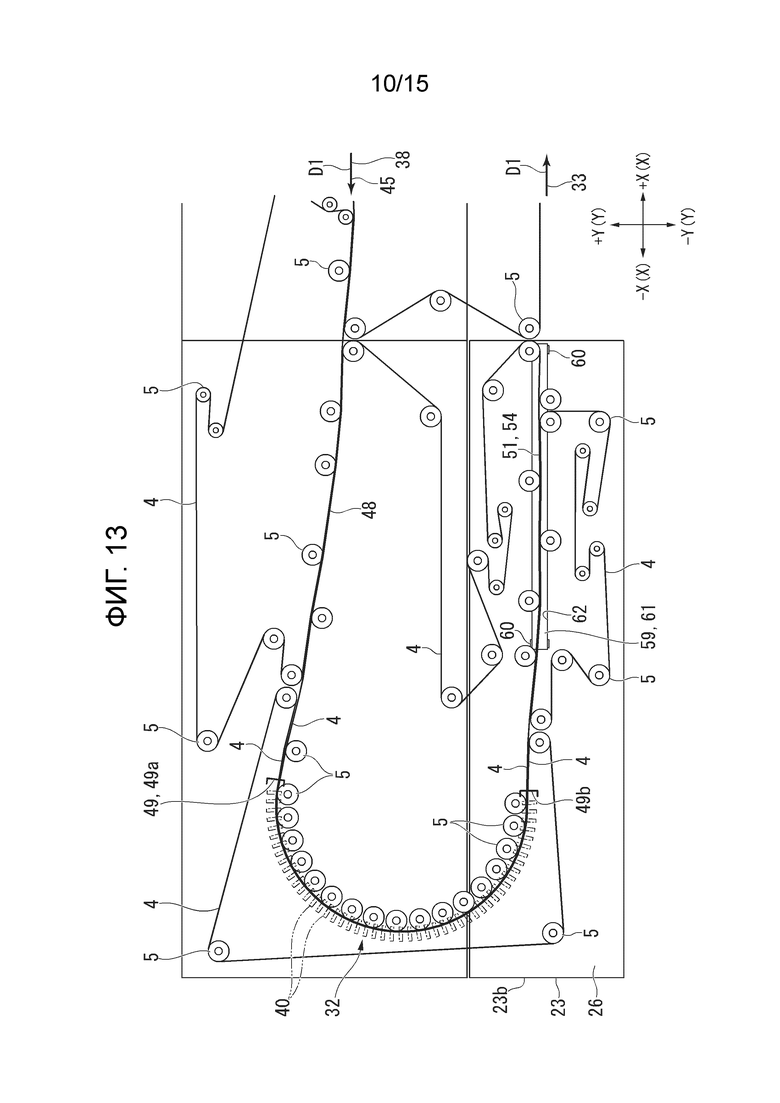
Фиг.13 представляет собой вид в плане, на котором показана часть конфигурации перемещающего механизма.
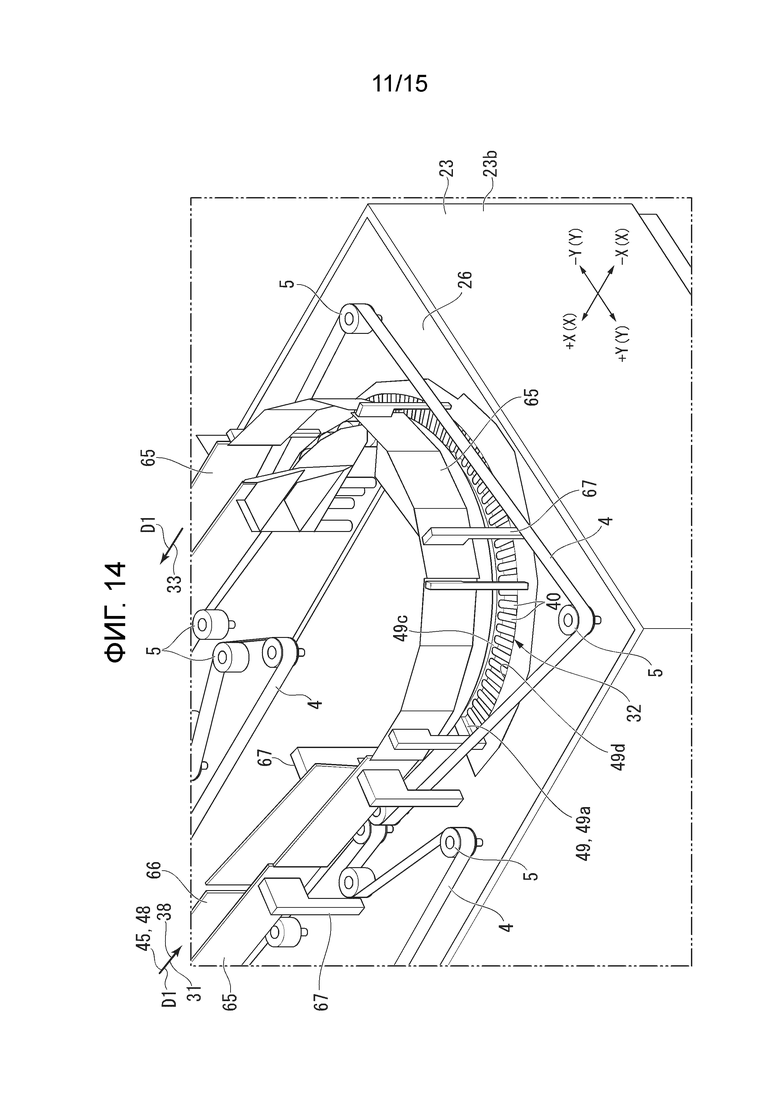
Фиг.14 представляет собой вид в перспективе, на котором показана часть конфигурации перемещающего механизма.
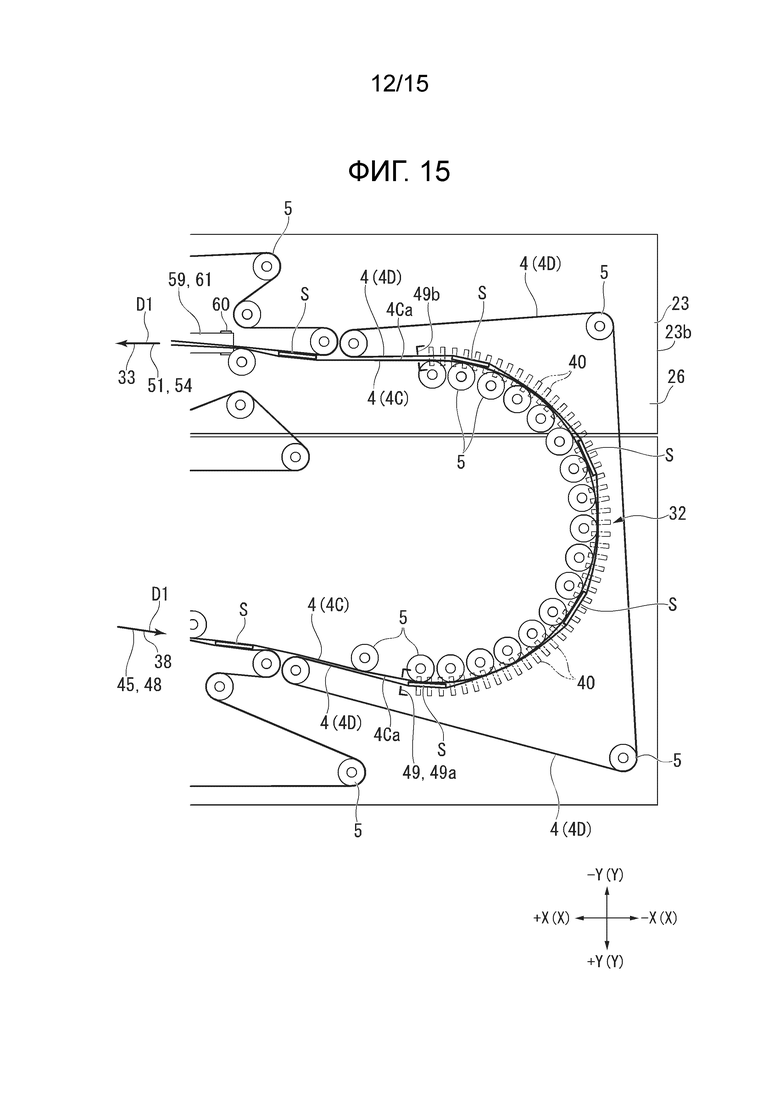
Фиг.15 представляет собой вид в плане, на котором схематично показана конфигурация пути изменения направления.
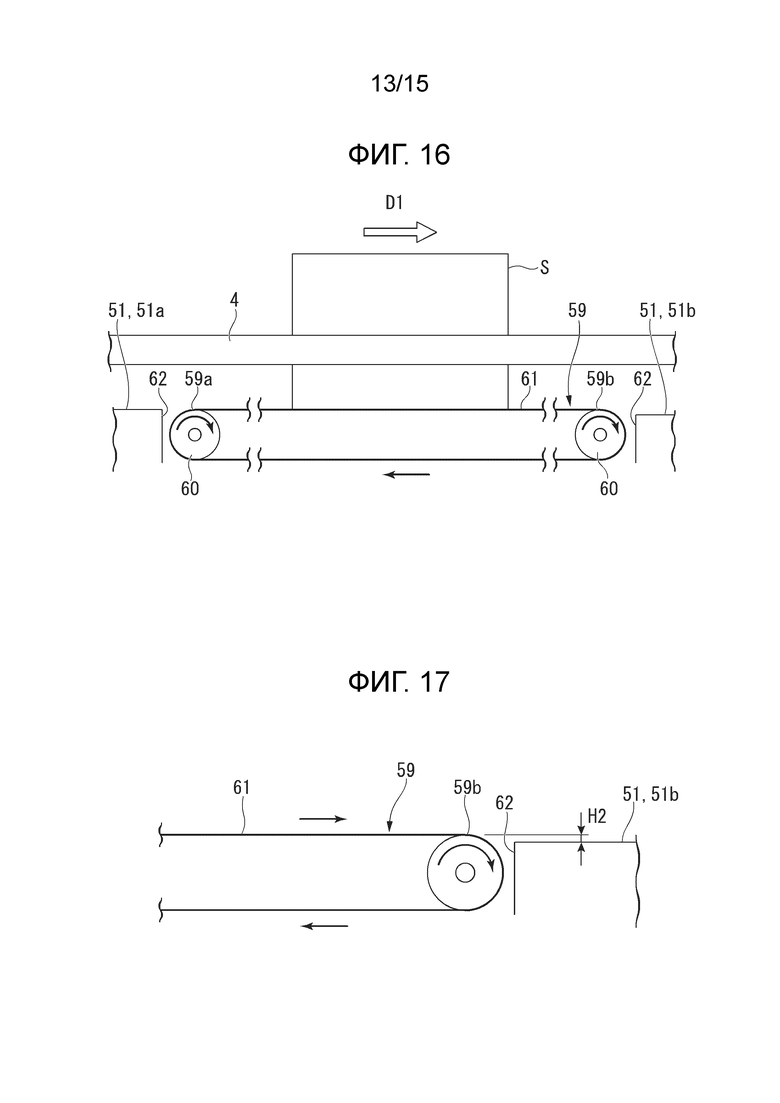
Фиг.16 представляет собой вид сбоку, на котором схематично показана конфигурация напольного конвейерного ремня.
Фиг.17 представляет собой вид сбоку, на котором схематично показана конфигурация части напольного конвейерного ремня.
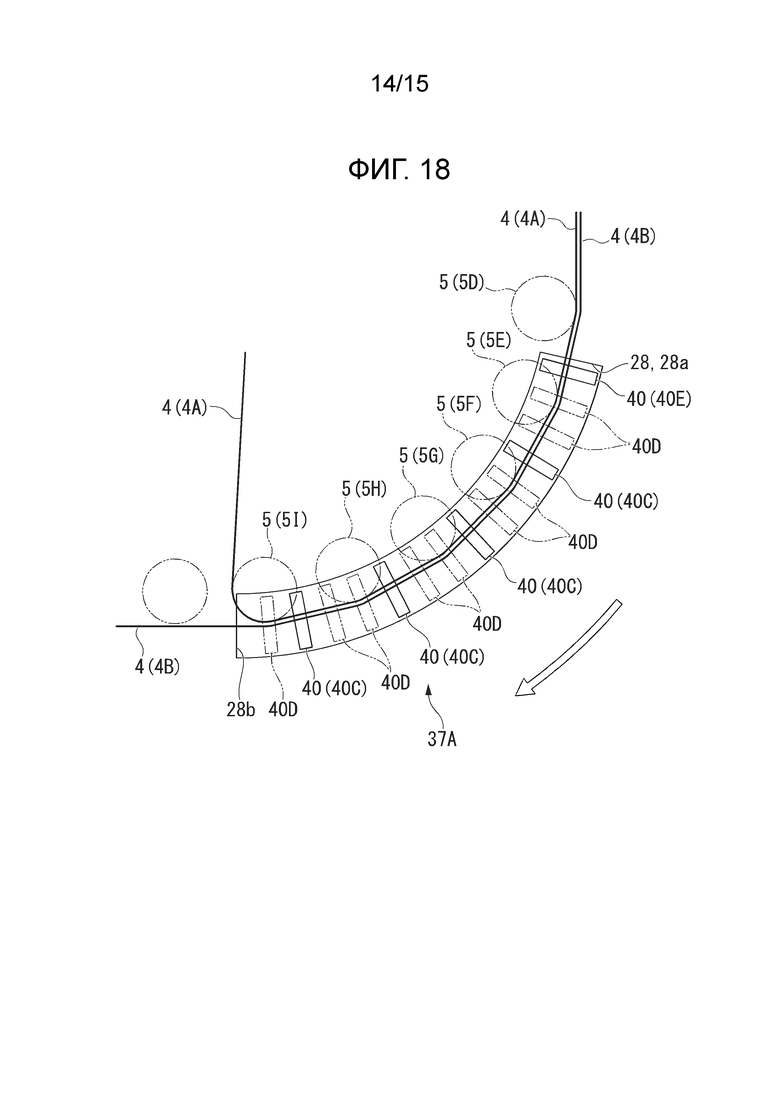
Фиг.18 представляет собой вид в плане, на котором показан модифицированный пример перемещающего механизма.
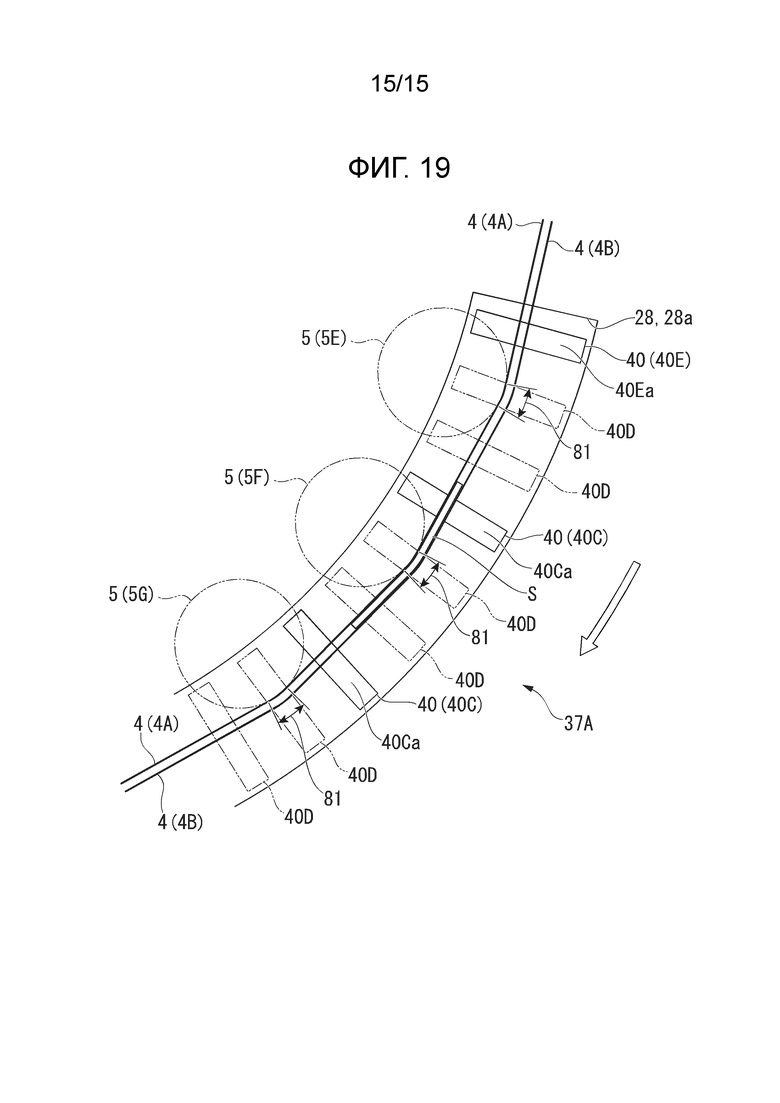
Фиг.19 представляет собой увеличенный вид в плане, на котором показан перемещающий механизм согласно Фиг.18.
Подробное описание вариантов осуществления настоящего изобретения
Согласно одному варианту осуществления, устройство для обработки отправлений включает в себя перемещающий механизм и множество накопителей. Перемещающий механизм включает в себя конвейер, по меньшей мере два конвейерных ремня, и приводное устройство. Конвейер предусмотрен с маршрутом перемещения, включающим в себя путь изменения направления, выполненный с возможностью изменения направления перемещения объекта отправления. Два конвейерных ремня выполнены с возможностью охватывания объекта отправления с обеих сторон для перемещения объекта отправления по маршруту перемещения. Приводное устройство выполнено с возможностью приведения в движения конвейерных ремней. Объект отправления, перемещаемый посредством перемещающего механизма, накапливается во множестве накопителей. Один из двух конвейерных ремней представляет собой конвейерный ремень на внутренней периферии, предусмотренный на пути изменения направления. Другой из двух конвейерных ремней представляет собой конвейерный ремень на наружной периферии, который может быть растянут больше, чем конвейерный ремень на внутренней периферии, и обращен к наружной периферийной поверхности конвейерного ремня на внутренней периферии. Путь изменения направления включает в себя одну или несколько вращающихся опор, которые выполнены с возможностью приведения в контакт с объектом отправления и выполнены с возможностью вращения вокруг оси, пересекающей направление перемещения.
Далее в этом документе со ссылкой на чертежи описано устройство для обработки отправлений согласно варианту осуществления.
Сначала будет дано описание Фиг.1, Фиг.2 и общей конфигурации устройства 1 для обработки отправлений согласно варианту осуществления.
Фиг.1 представляет собой вид в плане, на котором схематично показана конфигурация устройства 1 для обработки отправлений согласно варианту осуществления.
Фиг.2 представляет собой блок-схему, на которой показана схематичная конфигурация сортирующего процессора предварительной обработки.
Как видно на Фиг.1 и 2, устройство 1 для обработки отправлений представляет собой устройство, которое распознает пункт назначения, обозначенный на объекте S отправления, таком как запечатанное письмо или тому подобное, или прикрепленный к нему, и сортирует и накапливает объекты S отправления в штабелеукладчике, соответствующем пункту назначения.
Устройство 1 для обработки отправлений представляет собой, например, машину для обработки и сортировки почтовых отправлений, установленную в почтовом отделении или тому подобном.
В дальнейшем описании, может быть использована система координат XY.
Направление X представляет направление в длину (поперечное направление на Фиг.1) устройства 1 для обработки отправлений.
Направление Y представляет направление, перпендикулярное направлению X на поверхности маршрута 2 перемещения и является направление в ширину (вертикальным направлением на Фиг.1) устройства 1 для обработки отправлений.
Вид в плане обозначает вид в направлении, перпендикулярном плоскости XY.
На Фиг.1, одно направление (направление вправо) направления X обозначено как направление +X, а противоположное ему направление обозначено как направление -X.
Одно направление (направление вверх) направления Y обозначено как направление +Y, а противоположное ему направление обозначено как направление -Y.
Как видно на Фиг.1, устройство 1 для обработки отправлений включает в себя, например, перемещающий механизм 20 и сортировщик 70.
Сортировщик 70 имеет множество штабелеукладчиков 71 (накопителей).
Количество штабелеукладчиков 71 может быть любым от двух или более.
Штабелеукладчики 71 включают в себя множество расположенных с одной стороны штабелеукладчиков 71A (первых накопителей), предусмотренных у наружной стороны (направление +Y) одной стороны конвейерного стола 3, и множество расположенных с другой стороны штабелеукладчиков 71B (вторых накопителей), предусмотренных у наружной стороны (направление -Y) другой стороны конвейерного стола 3.
Множество расположенных с одной стороны штабелеукладчиков 71A и множество расположенных с другой стороны штабелеукладчиков 71B предусмотрены так, чтобы быть выровненными в направлении в длину (направлении X) перемещающего механизма 20.
Как видно на Фиг.1 и 2, перемещающий механизм 20 включает в себя сортирующий процессор 10 предварительной обработки, причем конвейерный стол 3 имеет маршрут 2 перемещения, конвейерный ремень 4 (см. Фиг.3 или подобные), опорный ролик 5 (см. Фиг.3 или подобные), приводное устройство 6, и блок 7 управления.
Сортирующий процессор 10 предварительной обработки включает в себя подающее устройство 11, выравниватель 12 положения, определитель 13 возможности перемещения, накопитель 14 отсева, считывающее устройство 15, запросчик 16 видеокодирования (video coding (VC)), струйный принтер (ink jet printer (IJP)) 17, и корректор 18 зазора (см. Фиг.1 или подобные).
Из подающего устройства 11 подается множество объектов S отправления один за другим.
В выравнивателе 12 положения, например, выравниваются положения нижних концов объектов S отправления.
В определителе 13 возможности перемещения у объектов S отправления определяются размеры, положения, расположение внахлест нескольких предметов, наличие посторонних предметов или металлов, или тому подобное.
Когда размер, толщина, или тому подобное объекта S отправления не соответствует требованиям, множество предметов объектов S отправления расположено внахлест, в объекте S отправления находится посторонний материал или тому подобное, или положение объекта S отправления не соответствует требованиям, такие объекты S отправления определяются как неперемещаемые и отправляются к накопителю 14 отсева.
Другие объекты S отправления проходят по их пути.
Считывающее устройство 15 включает в себя камеру (датчик линии), который выполняет захват изображения объекта S отправления.
Считывающее устройство 15 может считывать штриховой код (штриховой код для сортировки или тому подобного), изображенный на объекте S отправления.
Считывающее устройство 15 также выполняет функцию процессора оптического распознавания символов (optical character recognition (OCR)), чтобы считывающее устройство 15 выполняло OCR обработку изображений, захваченных камерой, и считывало такую информацию об объекте S отправления как почтовый индекс, пункт назначения, отправитель, или тому подобное.
Как видно на Фиг.2, VC запросчик 16 передает изображение (неразборчивое изображение) объекта S отправления, с которого считывающее устройство 15 не может считывать всю или некоторую информацию, к терминалу 90 видеокодирования (video coding (VC)) через сеть NW, и VC запросчик 16 принимает от VC терминала 90 информацию (например, почтовый индекс и пункт назначения), относящуюся к объекту S отправления.
В VC терминале 90 изображение, полученное от устройства 1 для обработки отправлений, показывается оператору, и информация, введенная оператором, возвращается к устройству 1 для обработки отправлений.
Процесс показывания изображения и приема ввода называется VC обработкой.
VC запросчик 16 выполняет функцию передатчика информации, посредством которого неразборчивое изображение передается к VC терминалу 90, и функцию приемника информации, посредством которого от VC терминала 90 принимается информация, относящаяся к неразборчивому изображению (информация, введенная оператором).
IJP 17 (принтер) печатает объект, содержащий закодированную информацию об объекте S отправления, полученную посредством считывающего устройства 15 или VC запросчика 16, на объекте S отправления в виде малозаметного штрихового кода.
Напечатанный малозаметный штриховой код считывается устройством 19 считывания штрихового кода (см. Фиг.1), присоединенного к IJP 17, для выполнения процесса проверки.
Корректор 18 зазора, показанный на Фиг.1, корректирует зазор между множеством объектов S отправления для соответствия заданному диапазону посредством регулировки скорости перемещения объектов S отправления.
Как видно на Фиг.1, конвейерный стол 3 (конвейер) включает в себя первую продолговатую часть 21, промежуточную соединительную часть 22 и вторую продолговатую часть 23.
Каждая из первой продолговатой части 21 и второй продолговатой части 23 проходит по прямой линии в направлении X при виде в плане.
Первая продолговатая часть 21 и вторая продолговатая часть 23 расположены параллельно друг другу на расстоянии друг от друга.
Промежуточная соединительная часть 22 предусмотрена между одной концевой частью 21a (концевой частью в направлении +X) первой продолговатой части 21 и одной концевой частью 23a (концевой частью в направлении +X) второй продолговатой части 23.
Маршрут 2 перемещения представляет собой путь, по которому объект S отправления перемещается к штабелеукладчику 71 на верхней поверхности конвейерного стола 3.
Маршрут 2 перемещения включает в себя первый путь 31 перемещения (внутренний путь перемещения), имеющий U-образную форму при виде в плане, срединный путь 32 изменения направления, и второй путь 33 перемещения (наружный путь перемещения), имеющий U-образную форму при виде в плане.
Направление, в котором перемещается объект S отправления, называется направлением D1 перемещения.
Первый путь 31 перемещения последовательно включает в себя первый частичный путь 34, первый путь 35 изменения направления, промежуточный путь 36, второй путь 37 изменения направления, и второй частичный путь 38 в направлении D1 перемещения.
Первый частичный путь 34 образован на верхней пластине 24 первой продолговатой части 21 по существу в направлении в длину (направлении X) первой продолговатой части 21.
Первый частичный путь 34 проходит от подающего устройства 11 к концевой части 21a первой продолговатой части 21 через выравниватель 12 положения, определитель 13 возможности перемещения, считывающее устройство 15 и VC запросчик 16.
Далее описан перемещающий механизм 20 со ссылкой на Фиг.3-17.
Фиг.3 представляет собой вид в плане, на котором показана часть конфигурации перемещающего механизма 20.
Фиг.4 представляет собой вид в перспективе, на котором показана часть конфигурации перемещающего механизма 20.
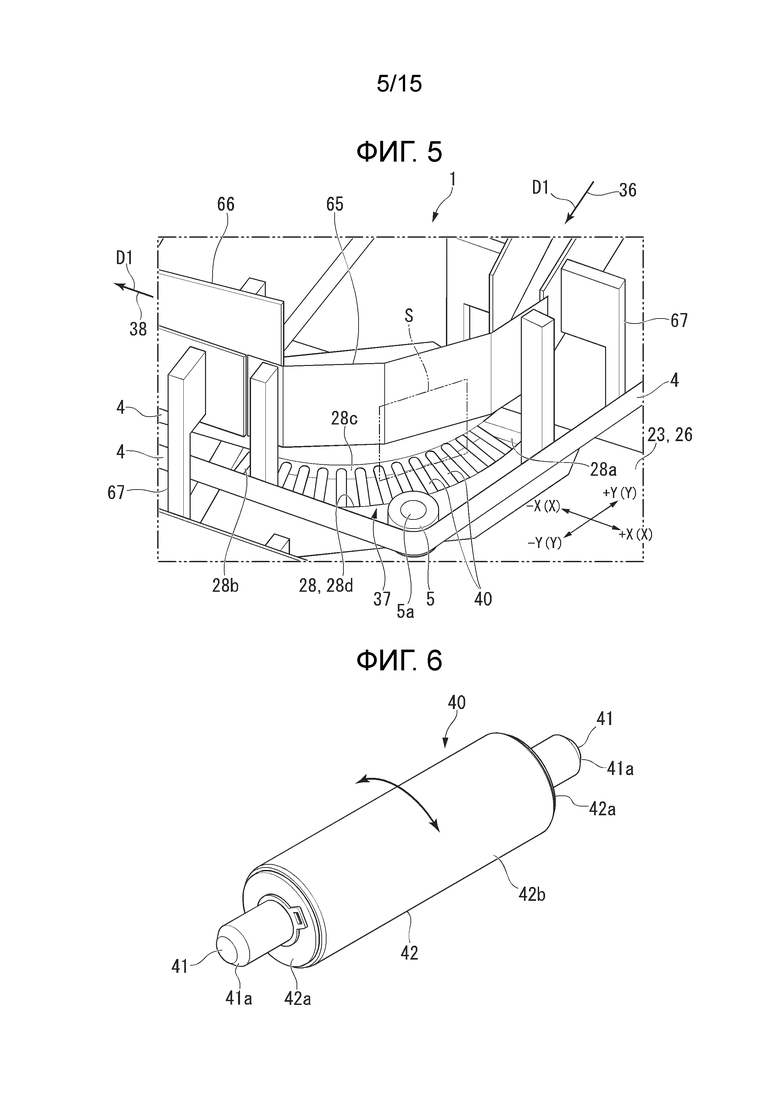
Фиг.5 представляет собой вид в перспективе, на котором показана конфигурация второго пути 37 изменения направления для части I на Фиг.3 (часть II на Фиг.4).
Фиг.6 представляет собой вид в перспективе, на котором показан конвейерный ролик 40.
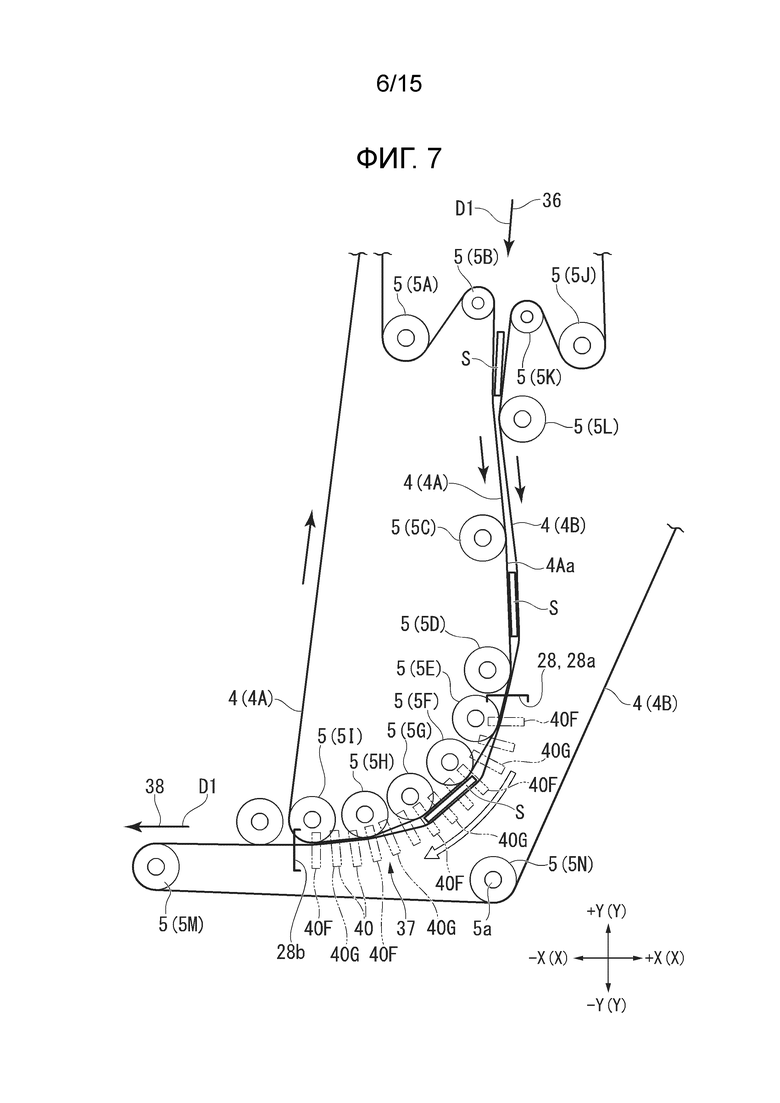
Фиг.7 представляет собой вид в плане, на котором схематично показана конфигурация второго пути 37 изменения направления для части I на Фиг.3.
Как видно на Фиг.3, первый путь 35 изменения направления выполнен так, чтобы быть изогнутым на верхней пластине 24 первой продолговатой части 21 при виде в плане.
Первый путь 35 изменения направления образован в форме дуги круга, соответствующей, например, четверти круга при виде в плане.
Первый путь 35 изменения направления может изменять направление перемещения (направление +X) объекта S отправления на первом частичном пути 34 на направление -Y.
Промежуточный путь 36 образован на верхней пластине 25 промежуточной соединительной части 22 в направлении в длину (направлении Y) промежуточной соединительной части 22.
Второй путь 37 изменения направления выполнен так, чтобы быть изогнутым на верхней пластине 26 второй продолговатой части 23 при виде в плане.
Второй путь 37 изменения направления образован в форме дуги круга, соответствующей, например, четверти круга при виде в плане.
Второй путь 37 изменения направления может изменять направление перемещения (направление -Y) объекта S отправления на промежуточном пути 36 на направление -X.
Как первый путь 35 изменения направления, так и второй путь 37 изменения направления имеют множество конвейерных роликов 40 (вращающихся опор).
Далее в этом документе, подробно описана конфигурация пути изменения направления, имеющего конвейерные ролики 40, со вторым путем 37 изменения направления, рассматриваемым в качестве примера, со ссылкой на Фиг.4-11.
Как видно на Фиг.4 и 5, второй путь 37 изменения направления составлен посредством множества конвейерных роликов 40, предусмотренных у отверстия 28, образованного на верхней пластине 26.
Как видно на Фиг.6, каждый из конвейерных роликов 40 имеет центральный вал 41 (центральную ось, ось) и тело 42.
Тело 42 выполнено, например, в форме цилиндра и поддерживается посредством центрального вала 41.
Тело 42 выполнено с возможностью вращения в окружном направлении тела 42 (в направлении вокруг оси центрального вала 41).
По меньшей мере наружная окружная поверхность 42b может быть преимущественно выполнена из металла (например, нержавеющей стали).
Следовательно, может быть подавлен износ наружной окружной поверхности 42b, возникающий из-за контакта с объектом S отправления.
По меньшей мере часть конвейерного ролика 40 может быть выполнена из полимерного материала (например, смолы, такой как полиацеталь, нейлон, полиэтилентерефталат, или тому подобное).
По меньшей мере часть тела 42 может быть выполнена из полимерного материала.
Следовательно, тело 42 имеет малый вес для способствования для способствования вращению конвейерного ролика 40.
Следовательно, может быть уменьшено трение между объектом S отправления и конвейерным роликом 40.
Центральный вал 41 предусмотрен вдоль центральной оси тела 42.
Концевые части 41a и 41a центрального вала 41 соответственно выступают наружу (в направлении от тела 42) из концевых частей 42a и 42a тела 42 в направлении центральной оси тела 42.
Как видно на Фиг.5 и 7, отверстие 28 выполнено в изогнутой форме при виде в плане, например, в форме дуги круга, соответствующей четверти круга.
Касательное направление у одного конца 28a отверстия 28 выровнено с направлением промежуточного пути 36 (направлением Y), а касательное направление у другого конца 28b отверстия 28 выровнено с направлением второго частичного пути 38 (направлением X).
Как видно на Фиг.5, множество конвейерных роликов 40 предусмотрено так, чтобы быть выровненным в направлении в длину отверстия 28.
Конвейерные ролики 40 расположены, например, с интервалами в направлении в длину отверстия 28.
Направление центрального вала 41 конвейерных роликов 40 представляет собой, например, перпендикулярное направлению в длину отверстия 28 (радиальному направлению отверстия 28 в форме дуги круга) в плоскости XY.
Концевые части 41a и 41a центрального вала 41 конвейерных роликов 40 поддерживаются внутренней периферийной краевой частью 28c и наружной периферийной краевой частью 28d отверстия 28.
Тело 42 расположено в отверстии 28 при виде в плане и выполнено с возможностью вращения вокруг центрального вала 41 (см. Фиг.6).
Направление прохождения отверстия 28 является таким же, как направление D1 перемещения объекта S отправления.
Второй путь 37 изменения направления может перемещать объект S отправления, в то время как объект S отправления устойчиво поддерживается посредством множества конвейерных роликов 40, поскольку второй путь 37 изменения направления имеет множество конвейерных роликов 40, выровненных в направлении в длину отверстия 28.
Так же, направление центрального вала 41 конвейерных роликов 40 не ограничено направлением, перпендикулярным направлению в длину отверстия 28, и может представлять собой направление, пересекающее направление в длину отверстия 28 (направление D1 перемещения).
К тому же, количество конвейерных роликов 40, составляющих один путь изменения направления, не ограничено множеством и может составлять один.
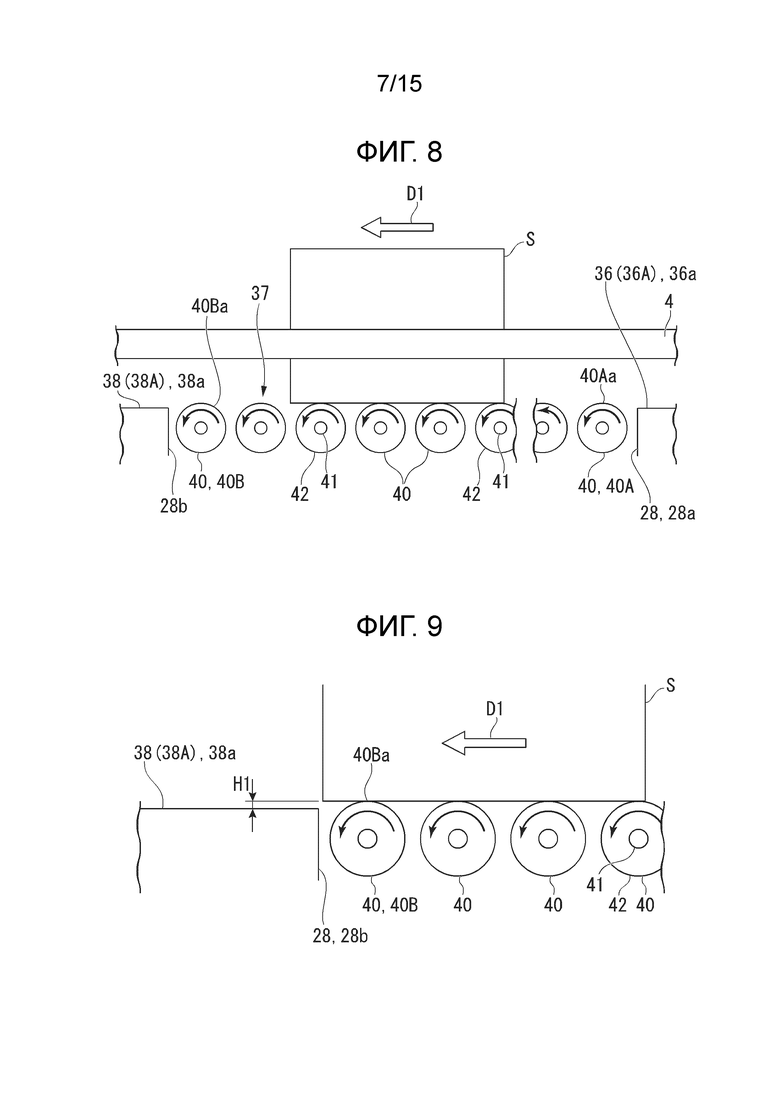
Фиг.8 представляет собой вид сбоку, на котором схематично показана конфигурация второго пути 37 изменения направления.
Фиг.9 представляет собой вид сбоку, на котором схематично показана конфигурация части второго пути 37 изменения направления.
Направление вверх на Фиг.8 и 9 представляет собой направление, перпендикулярное плоскости XY, направление от верхней пластины 26, и направление в высоту.
Как видно на Фиг.8 и 9, во втором частичном пути 38, часть 38A (путь скольжения), предусмотренная так, чтобы быть непрерывной с выходной стороной второго пути 37 изменения направления в направлении D1 перемещения, имеет поверхность 38a скольжения, по которой, например, может скользить объект S отправления.
Как видно на Фиг.9, среди конвейерных роликов 40, которые составляют второй путь 37 изменения направления, самая верхняя часть 40Ba конвейерного ролика 40B, находящегося ближе всего к выходной стороне в направлении D1 перемещения предпочтительно расположена выше относительно поверхности 38a скольжения.
Перепад H1 высоты между самой верхней частью 40Ba конвейерного ролика 40B и поверхностью 38a скольжения составляет, например, 0,5 мм или более.
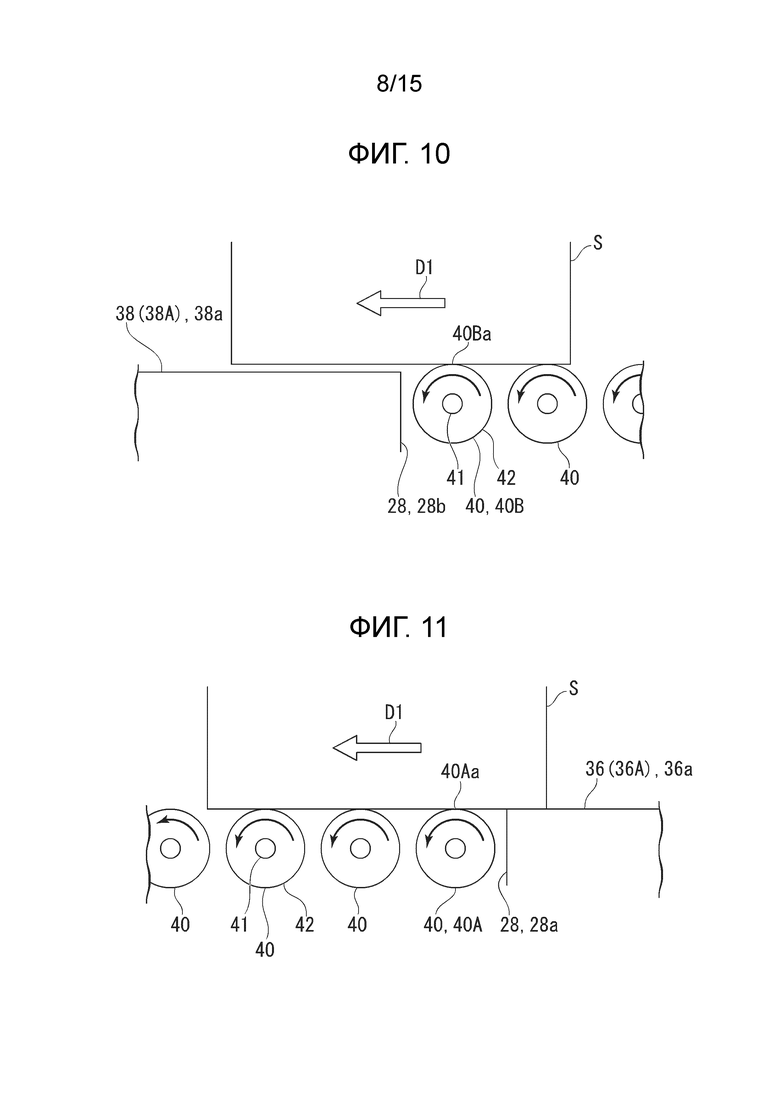
Как видно на Фиг.9 и 10, когда самая верхняя часть 40Ba конвейерного ролика 40B расположена в более высоком положении относительно поверхности 38a скольжения, объект S отправления перемещается к поверхности 38a скольжения из более высокого положения, чем поверхность 38a скольжения.
Таким образом, перемещение объекта S отправления с конвейерного ролика 40B на поверхность 38a скольжения становится плавным, без таких проблем как застревание объекта S отправления у другого конца 28b отверстия 28 или тому подобное.
Также, самая верхняя часть конвейерного ролика 40 представляет собой часть, находящуюся в самом верхнем положении относительно поверхности (горизонтальной поверхности) маршрута 2 перемещения.
Как видно на Фиг.11, на промежуточном пути 36, часть 36A, выполненная так, чтобы быть непрерывной с входной стороной второго пути 37 изменения направления в направлении D1 перемещения, имеет поверхность 36a скольжения по которой, например, может скользить объект S отправления.
Среди конвейерных роликов 40, которые составляют второй путь 37 изменения направления, самая верхняя часть 40Aa конвейерного ролика 40A ближе всего к входной стороне направления D1 перемещения предпочтительно находится на такой же высоте, что и поверхность 36a скольжения, или ниже, чем поверхность 36a скольжения.
Следовательно, перемещение объекта S отправления с поверхности 36a скольжения на конвейерный ролик 40A становится плавным.
Как видно на Фиг.3, первый путь 35 изменения направления составлен посредством множества конвейерных роликов 40, предусмотренных у отверстия 27, образованного в верхней пластине 24, как и второй путь 37 изменения направления.
Отверстие 27 выполнено в изогнутой форме при виде в плане, например, в форме дуги круга, соответствующей четверти круга.
Касательное направление у одного конца 27a отверстия 27 выровнено с направлением первого частичного пути 34 (направлением X), а касательное направление у другого конца 27b отверстия 27 выровнено с направлением промежуточного пути 36 (направлением Y).
Множество конвейерных роликов 40 предусмотрено так, чтобы быть выровненным в направлении в длину отверстия 27.
Направление центрального вала 41 конвейерных роликов 40 представляет собой, например, направление, перпендикулярное направлению в длину отверстия 27 (радиальное направление отверстия 27 в форме дуги круга) в плоскости XY.
Тело 42 конвейерного ролика 40 выполнено с возможностью вращения вокруг центрального вала 41 (см. Фиг.6).
Как видно на Фиг.1 и 3, второй частичный путь 38 образован на верхней пластине 26 второй продолговатой части 23.
Второй частичный путь 38 проходит от второго пути 37 изменения направления к концевой части 23b на другой стороне второй продолговатой части 23 (концевой части в направлении -X).
Как видно на Фиг.1, второй частичный путь 38 последовательно включает в себя основной путь 44 и обходной путь 45 в направлении D1 перемещения.
Основной путь 44 образован по прямой линии в направлении в длину (направлении X) второй продолговатой части 23 при виде в плане.
Обходной путь 45 последовательно включает в себя отклоненный наружу путь 46, промежуточный путь 47, и отклоненный вовнутрь путь 48 в направлении D1 перемещения.
Отклоненный наружу путь 46 отклонен наружу (направление -Y) в направлении D1 перемещения при виде в плане.
Промежуточный путь 47 образован по прямой линии в направлении в длину (направлении X) второй продолговатой части 23 при виде в плане.
Отклоненный вовнутрь путь 48 отклонен вовнутрь (направление +Y) в направлении D1 перемещения при виде в плане.
IJP 17 и устройство 19 считывания штрихового кода предусмотрены в положении вблизи от внутренней стороны (направление +Y) промежуточного пути 47.
Промежуточный путь 47 расположен у наружной стороны (направление -Y) по сравнению с основным путем 44 с точки зрения на положение в направлении в ширину (направлении Y) второй продолговатой части 23.
Следовательно, на второй продолговатой части 23 обеспечено достаточное пространство для установки IJP 17 и устройства 19 считывания штрихового кода.
Участок первого частичного пути 34 ниже по потоку от VC запросчика 16 в направлении D1 перемещения, первый путь 35 изменения направления, промежуточный путь 36, второй путь 37 изменения направления, основной путь 44, и участок 45A обходного пути 45 выше по потоку от IJP 17 в направлении D1 перемещения принадлежат пути задержки перемещения.
Путь задержки перемещения относится к пути для поддерживания времени, необходимого оператору в VC терминале 90 (см. Фиг.2) для ввода информации (для VC обработки).
Объекты S отправления, сортировочная информация о которых не может быть распознана, обрабатываются без исключения благодаря времени для VC обработки, поддерживаемому посредством пути задержки перемещения, и, следовательно, скорость работы устройства может быть увеличена.
Как видно на Фиг.13-15, срединный путь 32 изменения направления выполнен так, чтобы быть изогнутым на верхней пластине 26 второй продолговатой части 23 при виде в плане.
Срединный путь 32 изменения направления образован в форме дуги круга, соответствующей, например, почти полукругу при виде в плане.
Срединный путь 32 изменения направления изогнут так, чтобы направление D1 перемещения поворачивалось против часовой стрелки при виде в плане.
Срединный путь 32 изменения направления может изменять направление перемещения объектов S отправления на втором частичном пути 38 на направление +X.
Срединный путь 32 изменения направления включает в себя множество конвейерных роликов 40, как первый путь 35 изменения направления и второй путь 37 изменения направления.
Как видно на Фиг.14 и 15, срединный путь 32 изменения направления составлен посредством множества конвейерных роликов 40 (см. Фиг.6), предусмотренных в отверстии 49, образованном в верхней пластине 26.
Отверстие 49 выполнено в изогнутой форме при виде в плане, например, в форме дуги круга, соответствующей почти полукругу.
Касательное направление у одного конца 49a отверстия 49 выровнено с направлением отклоненного вовнутрь пути 48, а касательное направление у другого конца 49b отверстия 49 выровнено с направлением прямого пути 51 (направлением X).
Множество конвейерных роликов 40 предусмотрено так, чтобы быть выровненным в направлении в длину отверстия 49.
Конвейерные ролики 40 расположены, например, с интервалами в направлении в длину отверстия 49.
Направление центрального вала 41 конвейерных роликов 40 представляет собой направление, перпендикулярное, например, направлению в длину отверстия 49 (радиальному направлению отверстия 49 в форме дуги круга) в плоскости XY.
Как видно на Фиг.14, концевые части 41a и 41a центрального вала 41 конвейерных роликов 40 поддерживаются посредством внутренней окружной краевой части 49c и наружной окружной краевой части 49d отверстия 49.
Тело 42 расположено в отверстии 49 при виде в плане и выполнено с возможностью вращения вокруг центрального вала 41 (см. Фиг.6).
Также, направление центрального вала 41 конвейерных роликов 40 не ограничено направлением, перпендикулярным направлению в длину отверстия 49, и может представлять собой направление, пересекающее направление в длину отверстия 49.
Среди конвейерных роликов 40, которые составляют срединный путь 32 изменения направления, самая верхняя часть конвейерного ролика 40, находящегося ближе всего к выходной стороне в направлении D1 перемещения предпочтительно расположена в более высоком положении относительно поверхности скольжения второго пути 33 перемещения, которая представляет собой часть, предусмотренную так, чтобы она была непрерывной с выходной стороной срединного пути 32 изменения направления в направлении D1 перемещения (см. Фиг.9).
Перепад высоты между самой верхней частью конвейерного ролика 40, находящегося ближе всего к выходной стороне в направлении D1 перемещения и поверхностью скольжения составляет, например, 0,5 мм или более.
Следовательно, перемещение объекта S отправления с конвейерного ролика 40 на поверхность скольжения становится плавным, без таких проблем как застревание объекта S отправления у другого конца 49b отверстия 49.
Среди конвейерных роликов 40, которые составляют срединный путь 32 изменения направления, самая верхняя часть конвейерного ролика 40 ближе всего к входной стороне направления D1 перемещения предпочтительно расположена на такой же высоте, что и поверхность скольжения отклоненного вовнутрь пути 48, которая представляет собой часть, предусмотренную так, чтобы она была непрерывной с входной стороной срединного пути 32 изменения направления в направлении D1 перемещения, или ниже, чем поверхность скольжения (см. Фиг.11).
Следовательно, перемещение объекта S отправления с поверхности скольжения на конвейерный ролик 40 становится плавным.
Как видно на Фиг.1, второй путь 33 перемещения последовательно включает в себя второй частичный путь 54, первый путь 55 изменения направления, промежуточный путь 56, второй путь 57 изменения направления, и первый частичный путь 58 в направлении D1 перемещения.
Второй частичный путь 54 образован на верхней пластине 26 второй продолговатой части 23.
Второй частичный путь 54 проходит от срединного пути 32 изменения направления к концевой части 23a второй продолговатой части 23 (концевой части в направлении +X).
Второй частичный путь 54 последовательно включает в себя прямой путь 51, отклоненный вовнутрь путь 52, и основной путь 53 в направлении D1 перемещения.
Второй частичный путь 54 расположен так, чтобы находиться на расстоянии в направлении наружу (направлении -Y) от второго частичного пути 38 первого пути 31 перемещения.
Прямой путь 51 образован по существу по прямой линии в направлении в длину (направлении X) второй продолговатой части 23 при виде в плане.
Отклоненный вовнутрь путь 52 отклонен вовнутрь (в направлении +Y) в направлении D1 перемещения при виде в плане.
Основной путь 53 образован по прямой линии в направлении в длину (направлении X) второй продолговатой части 23 при виде в плане.
Как видно на Фиг.13, на части прямого пути 51 предусмотрен напольный конвейерный ремень 59 (напольный конвейер).
Как видно на Фиг.13 и 16, напольный конвейерный ремень 59 включает в себя пару шкивов 60 и 60 (вращающихся элементов), расположенных на расстоянии друг от друга в направлении в длину (направлении X) второй продолговатой части 23, и бесконечный ремень 61, натянутый между шкивами 60 и 60.
Напольный конвейерный ремень 59 предусмотрен в отверстии 62, образованном в верхней пластине 26 второй продолговатой части 23.
В напольном конвейерном ремне 59 шкив 60 может быть приведен посредством вращения шкива 60 с помощью использования приводного устройства, такого как двигатель или тому подобное (не показано на чертеже).
Скорость приведения в движение напольного конвейерного ремня 59 может быть такой же, как скорость приведения в движение конвейерного ремня 4.
Как видно на Фиг.17, когда поверхность у части, предусмотренной с возможностью быть непрерывной с выходной стороной напольного конвейерного ремня 59 прямого пути 51 в направлении D1 перемещения, представляет собой поверхность 51b скольжения, самая верхняя часть 59b концевой части выходной стороны бесконечного ремня 61 в направлении D1 перемещения предпочтительно расположена в более высоком положении относительно поверхности 51b скольжения прямого пути 51 у выходной стороны направления D1 перемещения.
Перепад H2 высоты между самой верхней частью 59b и поверхностью 51b скольжения составляет, например, 0,5 мм или более.
Когда самая верхняя часть 59b концевой части напольного конвейерного ремня 59 находится в положении выше, чем поверхность 51b скольжения, перемещение объекта S отправления с напольного конвейерного ремня 59 на поверхность 51b скольжения становится плавным.
Как видно на Фиг.16, самая верхняя часть 59a концевой части входной стороны напольного конвейерного ремня 59 в направлении D1 перемещения предпочтительно расположена на такой же высоте, что и поверхность 51a скольжения у входной стороны направления D1 перемещения, или ниже, чем поверхность 51a скольжения.
Следовательно, перемещение объекта S отправления с поверхности 51a скольжения на напольный конвейерный ремень 59 становится плавным.
Возможно уменьшить сдавливающую силу, прилагаемую к объекту S отправления, когда объект S отправления сжат для удерживания в части участка, на котором предусмотрен напольный конвейерный ремень 59, посредством регулировки натяжения конвейерного ремня 4 или положения опорного ролика 5.
Зазор между конвейерными ремнями 4 и 4 может быть увеличен для уменьшения сдавливающей силы, прилагаемой к объекту S отправления.
Следовательно, объект S отправления опускается под действие собственного веса для приведения в контакт с напольным конвейерным ремнем 59, и положение объекта S отправления может быть нормализовано.
Например, когда нижний край объекта S отправления, имеющего прямоугольную форму, наклоненного относительно поверхности верхней пластины 26, опускается под действием собственного веса для приведения в контакт с напольным конвейерным ремнем 59, нижний край объекта S отправления принимает горизонтальное положение вдоль плоскости XY.
Как видно на Фиг.1 и 13, участок 45B на выходной стороне направления D1 перемещения от IJP 17 на обходном пути 45, срединный путь 32 изменения направления, и участок 54A на входной стороне направления D1 перемещения от основного пути 53 на втором частичном пути 54 составляют путь сушки, на котором сушится малозаметный штриховой код, напечатанный на объекте S отправления посредством IJP 17.
Штриховой код надежно высыхает благодаря пути сушки, и, таким образом, можно затруднить возникновение царапин, подтекания чернил или тому подобного, на штриховом коде.
Следовательно, возможно предотвратить затруднение считывания штрихового кода по причине контакта с другим объектом S отправления, когда объекты S отправления накапливаются в штабелеукладчике 71.
Основной путь 53 образован на верхней пластине 26 второй продолговатой части 23 в направлении в длину (направлении X) второй продолговатой части 23.
Основной путь 53 расположен на расстоянии в направлении наружу (направлении -Y) от основного пути 44 первого пути 31 перемещения.
Основной путь 53 образован на участке, на котором предусмотрены расположенные с другой стороны штабелеукладчики 71B в направлении в длину (направлении X) второй продолговатой части 23.
Как видно на Фиг.3, 4, и 12, первый путь 55 изменения направления выполнен так, чтобы быть изогнутым на верхней пластине 26 второй продолговатой части 23 при виде в плане.
Первый путь 55 изменения направления образован в форме дуги круга, соответствующей, например, четверти круга при виде в плане.
Первый путь 55 изменения направления может изменять направление перемещения (направление +X) объектов S отправления на втором частичном пути 54 на направление +Y.
Как видно на Фиг.3 и 12, первый путь 55 изменения направления составлен посредством множества конвейерных роликов 40, предусмотренных у отверстия 63, образованного на верхней пластине 26.
Отверстие 63 выполнено в изогнутой форме при виде в плане, например, в форме дуги круга, соответствующей четверти круга.
Касательное направление у одного конца 63a отверстия 63 выровнено с направлением второго частичного пути 54 (направлением X), а касательное направление у другого конца 63b отверстия 63 выровнено с направлением промежуточного пути 56 (направлением Y).
Множество конвейерных роликов 40 предусмотрено так, чтобы быть выровненным в направлении в длину отверстия 63.
Направление центрального вала 41 конвейерных роликов 40 представляет собой, например, направление, перпендикулярное направлению в длину отверстия 63 (радиальному направлению отверстия 63 в форме дуги круга) в плоскости XY.
Первый путь 55 изменения направления расположен отдельно в сторону наружной периферийной стороны относительно второго пути 37 изменения направления первого пути 31 перемещения.
Как видно на Фиг.3, промежуточный путь 56 образован на верхней пластине 25 промежуточной соединительной части 22 в направлении в длину (направлении Y) промежуточной соединительной части 22.
Промежуточный путь 56 расположен отдельно в сторону наружной периферийной стороны (направления +X) относительно промежуточного пути 36 первого пути 31 перемещения.
Второй путь 57 изменения направления выполнен так, чтобы быть изогнутым на верхней пластине 24 первой продолговатой части 21 при виде в плане.
Второй путь 57 изменения направления образован в форме дуги круга, соответствующей, например, четверти круга при виде в плане.
Второй путь 57 изменения направления может изменять направление перемещения (направление +Y) объектов S отправления на промежуточном пути 56 на направление -X.
Второй путь 57 изменения направления составлен посредством множества конвейерных роликов 40, предусмотренных в отверстии 64, образованном на верхней пластине 24.
Отверстие 64 выполнено в изогнутой форме при виде в плане, например, в форме дуги круга, соответствующей четверти круга.
Касательное направление у одного конца 64a отверстия 64 выровнено с направлением промежуточного пути 56 (направлением Y), а касательное направление у другого конца 64b отверстия 64 выровнено с направлением первого частичного пути 58 (направлением X).
Множество конвейерных роликов 40 предусмотрено так, чтобы быть выровненным в направлении в длину отверстия 64.
Направление центрального вала 41 конвейерных роликов 40 представляет собой, например, направление, перпендикулярное направлению в длину отверстия 64 (радиальному направлению отверстия 64 в форме дуги круга) в плоскости XY.
Второй путь 57 изменения направления расположен отдельно в сторону наружной периферийной стороны относительно первого пути 35 изменения направления первого пути 31 перемещения.
Как видно на Фиг.1, первый частичный путь 58 образован на верхней пластине 24 первой продолговатой части 21 в направлении в длину (направлении X) первой продолговатой части 21.
Первый частичный путь 58 проходит от второго пути 57 изменения направления к концевой части 21b на другой стороне первой продолговатой части 21.
Первый частичный путь 58 расположен отдельно в сторону наружной стороны (направления +Y) относительно первого частичного пути 34 первого пути 31 перемещения.
Первый частичный путь 58 образован на участке, на котором расположенные с одной стороны штабелеукладчики 71A предусмотрены в направлении в длину (направлении X) первой продолговатой части 21.
Часть первого частичного пути 34 и основной путь 44, которые являются частью пути задержки перемещения, предусмотрены у внутренней стороны второго пути 33 перемещения (между вторым частичным путем 54 и первым частичным путем 58).
Как видно на Фиг.4 и 7, по меньшей мере два конвейерных ремня 4 предусмотрены на конвейерном столе 3, чтобы объект S отправления мог быть перемещен по маршруту 2 перемещения.
Конвейерный ремень 4 представляет собой, например, бесконечный ремень, и поддерживается посредством множества опорных роликов 5 (опор ремня), предусмотренных у конвейерного стола 3 (первая продолговатая часть 21, промежуточная соединительная часть 22, и вторая продолговатая часть 23).
На Фиг.7 показаны два конвейерных ремня 4 и 4 (внутренний конвейерный ремень 4A и наружный конвейерный ремень 4B), предусмотренные на участке, включающем в себя второй путь 37 изменения направления на маршруте 2 перемещения.
Внутренний конвейерный ремень 4A (конвейерный ремень на внутренней периферии) представляет собой конвейерный ремень 4, проходящий через внутреннюю периферийную сторону второго пути 37 изменения направления, а наружный конвейерный ремень 4B (конвейерный ремень на наружной периферии) представляет собой конвейерный ремень 4, проходящий через наружную периферийную сторону второго пути 37 изменения направления.
Часть наружного конвейерного ремня 4B обращена к наружной периферийной поверхности 4Aa внутреннего конвейерного ремня 4A в части промежуточного пути 36 и второго пути 37 изменения направления.
Внутренний конвейерный ремень 4A и наружный конвейерный ремень 4B могут охватывать объект S отправления с обеих сторон в части промежуточного пути 36 и второго пути 37 изменения направления для перемещения объекта S отправления.
Внутренний конвейерный ремень 4A поддерживается посредством множества опорных роликов 5 (5A-5I).
Наружный конвейерный ремень 4B поддерживается посредством множества опорных роликов 5 (5J-5N).
Каждый из опорных роликов 5 выполнен, например, в форме колонны.
Например, опорные ролики 5 поддерживаются с возможностью вращения вокруг осей опорных колонн (например, опорная колонна 5a, показанная на Фиг.5 и 7), выступающих на конвейерном столе 3.
Опорные ролики 5 находятся в контакте с конвейерными ремнями 4 и 4 с внутренней периферийной стороны второго пути 37 изменения направления, и посредством этого определяется путь перемещения конвейерных ремней 4 и 4 вдоль второго пути 37 изменения направления.
На Фиг.15 показаны два конвейерных ремня 4 и 4 (внутренний конвейерный ремень 4C и наружный конвейерный ремень 4D), предусмотренные на участке, включающем в себя срединный путь 32 изменения направления на маршруте 2 перемещения.
Внутренний конвейерный ремень 4C представляет собой конвейерный ремень 4, проходящий через внутреннюю периферийную сторону срединного пути 32 изменения направления, а наружный конвейерный ремень 4D представляет собой конвейерный ремень 4, проходящий через наружную периферийную сторону срединного пути 32 изменения направления.
Часть наружного конвейерного ремня 4D обращена к наружной периферийной поверхности 4Ca внутреннего конвейерного ремня 4C на срединном пути 32 изменения направления.
Внутренний конвейерный ремень 4C и наружный конвейерный ремень 4D могут охватывать объект S отправления с обеих сторон на срединном пути 32 изменения направления для перемещения объекта S отправления.
Как внутренний конвейерный ремень 4C, так и наружный конвейерный ремень 4D поддерживается посредством множества опорных роликов 5.
Конвейерные ремни 4 (4A-4D) образованы, например, из смолы, такой как полиэстер или тому подобное.
Поверхность конвейерного ремня 4 может быть образована, например, с покрывающим слоем, составленным из смолы, такой как полиуретан или тому подобное.
Удлинение наружных конвейерных ремней 4B и 4D предпочтительно больше, чем удлинение внутренних конвейерных ремней 4A и 4C. То есть, наружные конвейерные ремни 4B и 4D предпочтительно выполнены с возможностью большего растяжения, чем внутренние конвейерные ремни 4A и 4C.
Удлинение наружных конвейерных ремней 4B и 4D может быть задано, например, в диапазоне 2-20% (например, 2,5-7,5%).
Удлинение наружных конвейерных ремней 4B и 4D может составлять, например, 5%.
Удлинение внутренних конвейерных ремней 4A и 4C может быть задано, например, в диапазоне 0,1-5% (например, 0,5-2%, например).
Удлинение внутренних конвейерных ремней 4A и 4C может составлять, например, 1%.
Также, например, коэффициент удлинения может быть задан, например, согласно японскому промышленному стандарту JIS K 7161 или тому подобному.
Когда удлинение наружных конвейерных ремней 4B и 4D больше, чем удлинение внутренних конвейерных ремней 4A и 4C, сдавливающая сила, прилагаемая к объекту S отправления, может быть уменьшена, когда объект S отправления охвачен и удерживается с двух сторон.
Таким образом, может быть уменьшена сила, прижимающая объект S отправления к поверхности (к поверхностям верхней пластины 24, 25, и 26) маршрута 2 перемещения.
Также, поскольку перемещение вверх (перемещение от маршрута 2 перемещения) объекта S отправления облегчается благодаря уменьшению сдавливающей силы, прилагаемой к объекту S отправления, может быть исключено приложение к объекту S отправления большой силы по причине неравномерностей, даже когда маршрут 2 перемещения имеет неравномерности.
Соответственно, может быть исключено повреждение объекта S отправления.
Натяжение во время удлинения наружных конвейерных ремней 4B и 4D предпочтительно меньше, чем натяжение во время удлинения внутренних конвейерных ремней 4A и 4C.
Натяжение наружных конвейерных ремней 4B и 4D может быть задано, например, в диапазоне 5-50 Н (например, 10-30 Н) при 5% удлинении.
Натяжение наружных конвейерных ремней 4B и 4D может составлять, например, 20 Н при 5% удлинении.
Натяжение внутренних конвейерных ремней 4A и 4C может быть задано, например, в диапазоне 50-500 Н (например, 100-200 Н) при 1% удлинении.
Натяжение внутренних конвейерных ремней 4A и 4C может составлять 160 Н при 1% удлинении.
Удлинение конвейерных ремней 4 (4A-4D) может быть подтверждено, например, следующим образом.
Множество линий разметки, расположенных с заданным интервалом (например, 100 мм) в направлении в длину, наносится на конвейерный ремень 4 в состоянии, в котором конвейерный ремень 4 не растянут.
Описанный выше конвейерный ремень 4 прикрепляется к опорному ролику 5, в этом состоянии (в удлиненном состоянии) измеряется интервал между линиями разметки, и на основании измеренной величины вычисляется удлинение.
Например, когда интервал между линиями разметки конвейерного ремня 4 в неудлиненном состоянии составляет 100 мм, а интервал между линиями разметки в удлиненном состоянии составляет 105 мм, можно подтвердить, что конвейерный ремень 4 растянут на 5%.
По меньшей мере часть опорных роликов 5 приводится во вращение посредством приводного устройства 6, такого как двигатель или тому подобное (см. Фиг.2) для приведения в движение конвейерных ремней 4 (4A - 4D), и посредством этого объект S отправления может быть перемещен в направлении D1 перемещения.
Как видно на Фиг.2, блок 7 управления управляет величиной приведения в движение (например, частотой вращения двигателя) приводного устройства 6 и может произвольно регулировать, например, скорость перемещения объекта S отправления посредством конвейерных ремней 4.
Например, скорость перемещения объекта S отправления может быть переключена между первой скоростью перемещения и второй скоростью перемещения, которая отличается от первой скорости перемещения.
Как видно на Фиг.4, 5, и 14, множество наружных направляющих пластин 65 и множество внутренних направляющих пластин 66 предусмотрены у первой продолговатой части 21, промежуточной соединительной части 22, и второй продолговатой части 23 вдоль маршрута 2 перемещения (первый путь 31 перемещения, срединный путь 32 изменения направления, и второй путь 33 перемещения).
Наружные направляющие пластины 65 и внутренние направляющие пластины 66 представляют собой пластины, образованные из смолы, металла или тому подобного.
Наружные направляющие пластины 65 и внутренние направляющие пластины 66 образованы, например, перпендикулярно плоскости XY.
Наружные направляющие пластины 65 и внутренние направляющие пластины 66 поддерживаются посредством множества поддерживающих стоек 67, стоящих на верхних пластинах 24, 25, и 26 первой продолговатой части 21, промежуточной соединительной части 22 и второй продолговатой части 23.
Наружные направляющие пластины 65 и внутренние направляющие пластины 66 предусмотрены, например, в положениях, находящихся на расстоянии в направлении вверх от верхних пластин 24, 25, и 26.
Как видно на Фиг.5, наружные направляющие пластины 65 и внутренние направляющие пластины 66 предпочтительно образованы с их верхними концами, расположенными выше, чем высота объекта S отправления.
Наружные направляющие пластины 65 предусмотрены по существу вдоль первого пути 31 перемещения, срединного пути 32 изменения направления и второго пути 33 перемещения в положении, находящемся на расстоянии в направлении к наружной периферийной стороне от первого пути 31 перемещения, срединного пути 32 изменения направления, и второго пути 33 перемещения при виде в плане.
Внутренние направляющие пластины 66 предусмотрены в положении, находящемся на расстоянии в направлении к внутренней периферийной стороне от первого пути 31 перемещения, срединного пути 32 изменения направления, и второго пути 33 перемещения при виде в плане.
Внутренние направляющие пластины 66 предусмотрены, например, по существу вдоль первого пути 31 перемещения, срединного пути 32 изменения направления, и второго пути 33 перемещения на участке, на котором нет путей 35, 37, 32, 55, и 57 изменения направления на первом пути 31 перемещения, срединном пути 32 изменения направления и втором пути 33 перемещения.
Наружные направляющие пластины 65 и внутренние направляющие пластины 66 могут ограничивать наклон объекта S отправления и предотвращать возмущение положения объекта S отправления.
Далее описан способ обработки объекта S отправления посредством использования устройства 1 для обработки отправлений.
Объект S отправления, например, представляет собой листы бумаги, упакованные в упаковку в форме сумки, выполненную из пластика (например, полиэтилена).
Объект S отправления, подаваемый из подающего устройства 11, перемещается в направлении D1 перемещения по первому пути 31 перемещения, срединному пути 32 изменения направления, и второму пути 33 перемещения.
Объект S отправления перемещается в направлении D1 перемещения, в это же время контактируя с наружной окружной поверхностью 42b тела 42 конвейерных роликов 40 для поддерживания посредством конвейерных роликов 40, когда объект S отправления проходит по путям 35, 37, 32, 55, и 57 изменения направления.
В это время, область контакта между объектом S отправления и наружной окружной поверхностью 42b уменьшается, поскольку объект S отправления приходит в контакт только с самой верхней частью наружной окружной поверхности 42b конвейерного ролика 40.
Конвейерный ролик 40 может вращаться или может не вращаться вокруг центрального вала 41 во время перемещения объекта S отправления.
Пункт назначения сортировки объекта S отправления определяется на основании информации, полученной считывающим устройством 15 или VC запросчиком 16, и объект S отправления вводится в штабелеукладчик 71, соответствующий пункту назначения сортировки.
Когда соответствующий штабелеукладчик 71, например, находится среди расположенных с другой стороны штабелеукладчиков 71B, объект S отправления вводится в соответствующие расположенные с другой стороны штабелеукладчики 71B с основного пути 53 второго пути 33 перемещения.
Когда соответствующий штабелеукладчик 71, например, находится среди расположенных с одной стороны штабелеукладчиков 71A, объект S отправления вводится в соответствующие расположенные с одной стороны штабелеукладчики 71A с первого частичного пути 58 второго пути 33 перемещения.
Согласно по меньшей мере одному описанному выше варианту осуществления, поскольку первый путь 35 изменения направления, второй путь 37 изменения направления, срединный путь 32 изменения направления, первый путь 55 изменения направления, и второй путь 57 изменения направления имеют конвейерные ролики 40, объект S отправления перемещается в направлении D1 перемещения, в это же время контактируя с наружной окружной поверхностью 42b тела 42 конвейерных роликов 40 для поддерживания посредством конвейерных роликов 40.
Конвейерный ролик 40 выполнен с возможностью вращения вокруг центрального вала 41 во время перемещения объекта S отправления и имеет небольшую область контакта с объектом S отправления, и посредством этого уменьшена сила трения, действующая на объект S отправления.
На пути изменения направления, на котором изменяется направление перемещения объекта S отправления, сила трения о поверхность пути перемещения может проще оказывать локальное воздействие на объект S отправления по причине изменения положения или тому подобного объекта S отправления, вызванного центробежной силой или тому подобным.
С другой стороны, поскольку устройство 1 для обработки отправлений сила трения, действующая на объект S отправления, может быть подавлена, возможно предотвратить обтирание и повреждение упаковки объекта S отправления.
Следовательно, возможно предотвратить выпадение содержимого объекта S отправления наружу из упаковки.
Поскольку конвейерный ремень 4 имеет внутренний конвейерный ремень 4A и наружный конвейерный ремень 4B, который может быть растянут больше, чем внутренний конвейерный ремень 4A, сдавливающая сила, прилагаемая к объекту S отправления, может быть уменьшена, когда объект S отправления охвачен и удерживается с двух сторон между ними.
Таким образом, может быть уменьшена сила, прижимающая объект S отправления к поверхности маршрута 2 перемещения (поверхности верхних пластин 24, 25, и 26).
Также, поскольку сдавливающая сила уменьшается благодаря конвейерному ремню 4, облегчается перемещение вверх (перемещение от маршрута 2 перемещения) объекта S отправления.
Таким образом, может быть исключено приложение к объекту S отправления большой силы по причине неравномерностей, даже когда маршрут 2 перемещения имеет неравномерности.
Соответственно, может быть исключено повреждение упаковки объекта S отправления.
Поскольку сила трения, действующая на объект S отправления, может быть подавлена для предотвращения повреждения, устройство 1 для обработки отправлений может обрабатывать тяжелые объекты S отправления.
Следовательно, уменьшены ограничения размеров, типов, или тому подобного, объектов S отправления, и могут быть обработаны различные типы объектов S отправления.
Например, поскольку не требуется отделение крупногабаритных объектов отправления для отдельной обработки, возможно упростить работу и уменьшить затраты на обработку.
Поскольку конвейерный ролик 40 имеет цилиндрическую форму, и наружная окружная поверхность 42b тела 42, которая приходит в контакт с объектом S отправления, представляет собой цилиндрическую поверхность вдоль центрального вала 41, выполняющего функцию вращающегося вала, конвейерный ролик 40 может устойчиво поддерживать объект S отправления.
Следовательно, объект S отправления может быть обработан устойчиво.
Поскольку блок 7 управления управляет величиной приведения в движение (например, частотой вращения двигателя) приводного устройства 6, блок 7 управления может произвольно регулировать скорость перемещения объекта S отправления посредством конвейерных ремней 4.
Таким образом, возможно уменьшить скорость перемещения объекта S отправления.
Например, может быть задана скорость перемещения объекта S отправления, которая примерно в два раза меньше, чем обычная скорость.
Следовательно, возможно дополнительно уменьшить силу трения, действующую на объект S отправления, и предотвратить повреждение упаковки объекта S отправления.
К тому же, в устройстве 1 для обработки отправлений, часть первого пути 31 перемещения (часть первого частичного пути 34, первый путь 35 изменения направления, промежуточный путь 36, второй путь 37 изменения направления, основной путь 44, и часть участка 45A обходного пути 45) представляет собой путь задержки перемещения для поддерживания времени, необходимого оператору в VC терминале 90 (см. Фиг.2) для введения информации (для VC обработки).
Объекты S отправления, сортировочная информация о которых не может быть распознана, обрабатываются без исключения благодаря времени для VC обработки, поддерживаемому посредством пути задержки перемещения, и, следовательно, скорость работы устройства может быть увеличена.
Как описано выше, несмотря на то, что в устройстве 1 для обработки отправлений может быть предусмотрен путь задержки перемещения для поддерживания времени для VC обработки, поскольку путь перемещения удлиняется, существует проблема, заключающаяся в увеличении общего размера устройства 1 для обработки отправлений.
В устройстве 1 для обработки отправлений, поскольку часть пути задержки перемещения (часть первого частичного пути 34 и основного пути 44) предусмотрена внутри второго пути 33 перемещения (между вторым частичным путем 54 и первым частичным путем 58), возможно эффективно использовать внутреннее пространство второго пути 33 перемещения.
Таким образом, возможно уменьшить размер устройства 1 для обработки отправлений по сравнению со случаем, в котором сохраняется пространство для пути задержки перемещения у наружной стороны второго пути 33 перемещения.
Фиг.18 и 19 представляют собой виды в плане, на которых показаны модифицированные примеры перемещающего механизма.
Как видно на Фиг.18 и 19, на втором пути 37A изменения направления, внутренний конвейерный ремень 4A поддерживается в то время как его сторона находится в контакте с множеством опорных роликов 5 (5A-5I).
Как видно на Фиг.19, область конвейерного ремня 4 (внутреннего конвейерного ремня 4A), которая находится в контакте с опорным роликом 5, называется областью 81 контакта.
Положение второго пути 37A изменения направления в направлении прохождения называется ʺположением направления путиʺ.
Положение второго пути 37A изменения направления в направлении прохождения представляет собой, например, положение второго пути 37A изменения направления в окружном направлении контура дуги круга.
Посредством части конвейерных роликов 40 второго пути 37 изменения направления, показанного на Фиг.7, положение направления пути расположено внахлест с областью конвейерного ремня 4, которая находится в контакте с опорными роликами 5.
То есть, положение направления пути самой верхней части первого, четвертого, седьмого, десятого и тринадцатого конвейерных роликов 40F с одного конца 28a отверстия 28 включает в себя участок направления пути области контакта конвейерного ремня 4.
Следовательно, посредством самой верхней части конвейерных роликов 40F положение направления пути расположено внахлест с областью контакта конвейерного ремня 4.
С другой стороны, посредством самой верхней части других конвейерных роликов 40 положение направления пути не расположено внахлест с областью контакта конвейерного ремня 4.
Второй путь 37A изменения направления, показанный на Фиг.18 и 19, имеет конфигурацию, в которой часть (конвейерные ролики 40D, показанные воображаемыми линиями на Фиг.18 и 19) конвейерных роликов 40, показанная на Фиг.7, не предусмотрена.
Конвейерные ролики 4°C второго пути 37A изменения направления (показанные сплошными линиями на Фиг.18 и 19) имеют такую же конфигурацию, как третий, шестой, девятый и двенадцатый конвейерные ролики 40G с одного конца 28a на втором пути 37 изменения направления, показанном на Фиг.7.
Второй путь 37A изменения направления не включает в себя конвейерный ролик 40, посредством которого положение направления пути расположено внахлест с областью 81 контакта (например, первый, четвертый, седьмой, десятый и тринадцатый конвейерные ролики 40F с одного конца 28a на Фиг.7).
Следовательно, положение направления пути самой верхней части 40Ca (см. Фиг.19) конвейерных роликов 40C, которое составляет второй путь 37A изменения направления, отличается от положения направления пути области 81 контакта.
Когда расстояние между концевой частью отверстия 28 (например, один конец 28a) и конвейерным роликом 4°C является избыточно длинным, конвейерный ролик может быть дополнительно установлен между концевой частью отверстия 28 и ближайшим к ней конвейерным роликом 40C.
На Фиг.18 и 19, конвейерный ролик 40E дополнительно установлен в положении, ближайшем к одному концу 28a отверстия 28.
Следовательно, объект S отправления поддерживается во множестве мест, положение объекта S отправления может быть стабилизировано, и, таким образом, может быть предотвращено столкновение угловой части объекта S отправления с конвейерным роликом 40C, когда объект S отправления наклонен.
Ссылочной позицией 40Ea обозначена самая верхняя часть конвейерного ролика 40E, и положение направления пути самой верхней части 40Ea отличается от положения направления пути области 81 контакта.
В перемещающем механизме, показанном на Фиг.18 и 19, поскольку используются конвейерные ролики 4°C и 40E, у которых положения направления пути самых верхних частей 40Ca и 40Ea отличаются от положения направления пути области 81 контакта, уменьшен риск возникновения повреждения (например, поломки упаковки) объекта S отправления.
Возможно сделать следующее предположение о причине того, почему не может легко возникать повреждение объекта S отправления благодаря описанной выше конфигурации перемещающего механизма.
Несмотря на то что к объекту S отправления прилагается сдавливающая сила в направлении в толщину посредством опорных роликов 5 в положениях, в которых опорные ролики 5 находятся в контакте с внутренним конвейерным ремнем 4A, поскольку в положении направления пути, которое является таким же, как область 81 контакта в перемещающем механизме, показанном на Фиг.18 и 19, отсутствует конвейерный ролик 40, возможно предотвращать сильное сдавливание объекта S отправления посредством самой верхней части конвейерных роликов 40 из-за силы, прилагаемой опорными роликами 5.
Поскольку положения направления пути самых верхних частей 40Ca и 40Ea конвейерных роликов 4°C и 40E отличаются от положения направления пути областей 81 контакта, сила, прижимающая объект S отправления к конвейерным роликам 4°C и 40E, относительно уменьшена.
Следовательно, повреждение объекта S отправления (например, поломка упаковки) не может легко возникать.
В перемещающем механизме, показанном на Фиг.18 и 19, поскольку количество конвейерных роликов 40 (4°C и 40E) является небольшим, возможно легко вращать конвейерные ролики 40 и возможно уменьшить потерю энергии во время перемещения объекта S отправления.
Несмотря на то что описаны некоторые варианты осуществления, эти варианты осуществления представлены только для примера, и не направлены на ограничение объема изобретения. Фактически, инновационные варианты осуществления, описанные в этом документе, могут иметь различные другие варианты осуществления; кроме того, различные опущения, замены и изменения в форме вариантов осуществления, описанных в этом документе, могут быть выполнены без отхода от этих изобретений. Такие формы или модификации должны лежать в объеме этих изобретений, определенном в прилагаемой формуле изобретения и ее эквивалентах.
Согласно одному варианту осуществления, устройство для обработки отправлений включает в себя перемещающий механизм и множество накопителей. Перемещающий механизм включает в себя конвейер, по меньшей мере два конвейерных ремня и приводное устройство. Конвейер предусмотрен с маршрутом перемещения, включающим в себя путь изменения направления, выполненный с возможностью изменения направления перемещения объекта отправления. Два конвейерных ремня выполнены с возможностью охватывания объекта отправления с обеих сторон для перемещения объекта отправления по маршруту перемещения. Приводное устройство выполнено с возможностью приведения в движение конвейерных ремней. Объект отправления, перемещаемый посредством перемещающего механизма, накапливается во множестве накопителей. Один из двух конвейерных ремней представляет собой конвейерный ремень на внутренней периферии, предусмотренный на пути изменения направления. Другой из двух конвейерных ремней представляет собой конвейерный ремень на наружной периферии, который может быть растянут больше, чем конвейерный ремень на внутренней периферии, и обращен к наружной периферийной поверхности конвейерного ремня на внутренней периферии. Путь изменения направления включает в себя одну или несколько вращающихся опор, которые выполнены с возможностью приведения в контакт с объектом отправления и выполнены с возможностью вращения вокруг оси, пересекающей направление перемещения. 7 з.п. ф-лы, 19 ил.
1. Устройство для обработки отправлений, содержащее:
перемещающий механизм, содержащий конвейер, предусмотренный с маршрутом перемещения, включающим в себя путь изменения направления, выполненный с возможностью изменения направления перемещения объекта отправления, по меньшей мере пару конвейерных ремней, выполненных с возможностью охватывания объекта отправления с обеих сторон для перемещения объекта отправления по маршруту перемещения, и приводное устройство, выполненное с возможностью приведения в движение конвейерных ремней; и
множество накопителей, в которых накапливается объект отправления, перемещаемый посредством перемещающего механизма, причем
один из двух конвейерных ремней представляет собой конвейерный ремень на внутренней периферии, предусмотренный на пути изменения направления, а другой из двух конвейерных ремней представляет собой конвейерный ремень на наружной периферии, который может быть растянут больше, чем конвейерный ремень на внутренней периферии, и обращен к наружной периферийной поверхности конвейерного ремня на внутренней периферии, и
путь изменения направления содержит одну или несколько вращающихся опор, которые выполнены с возможностью приведения в контакт с объектом отправления и выполнены с возможностью вращения вокруг оси, пересекающей направление перемещения.
2. Устройство для обработки отправлений по п.1, в котором
каждая из вращающихся опор представляет собой цилиндрический ролик, который выполнен с возможностью вращения вокруг оси, которая является центральной осью.
3. Устройство для обработки отправлений по п.1 или 2, в котором
путь изменения направления содержит множество вращающихся опор, выровненных в направлении перемещения.
4. Устройство для обработки отправлений по п.1 или 2, в котором
маршрут перемещения дополнительно содержит путь скольжения, предусмотренный так, чтобы быть непрерывным с выходной стороной пути изменения направления в направлении перемещения, и
самая верхняя часть вращающейся опоры у находящейся ближе всего к выходу стороны в направлении перемещения среди вращающихся опор, составляющих путь изменения направления, расположена в более высоком положении относительно поверхности скольжения пути скольжения.
5. Устройство для обработки отправлений по п.3, в котором
маршрут перемещения дополнительно содержит путь скольжения, предусмотренный так, чтобы быть непрерывным с выходной стороной пути изменения направления в направлении перемещения, и
самая верхняя часть вращающейся опоры у находящейся ближе всего к выходу стороны в направлении перемещения среди вращающихся опор, составляющих путь изменения направления, расположена в более высоком положении относительно поверхности скольжения пути скольжения.
6. Устройство для обработки отправлений по п.1, в котором
перемещающий механизм дополнительно содержит блок управления, выполненный с возможностью управления величиной, с которой приводное устройство приводит в движение.
7. Устройство для обработки отправлений по п.1, в котором конвейер дополнительно содержит опору ремня, причем опора ремня выполнена с возможностью образования пути перемещения конвейерного ремня вдоль пути изменения направления посредством приведения в контакт с областью контакта конвейерного ремня с внутренней периферийной стороны пути изменения направления, причем
положение у самой верхней части вращающейся опоры в направлении прохождения пути изменения направления отличается от положения области контакта в направлении прохождения пути изменения направления.
8. Устройство для обработки отправлений по п.1, в котором
по меньшей мере часть вращающейся опоры выполнена из полимерного материала.
| US 2009166959 A1, 02.07.2009 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| US 5109987 A, 05.05.1992. | |||

