Изобретение относится к области техники, связанной с креплением и точной установкой регистрирующих устройств, в частности детекторов сцинтилляционных (далее по тексту детекторов (а)) по отношению к исследуемым объектам с одновременным определением пространственных координат детекторов, с последующим функционированием детекторов, закрепленных на предлагаемом устройстве, в условиях воздействия на них вибрации.
Наиболее близким устройством к заявленному изобретению по совокупности признаков является Опорно-поворотное устройство для ориентации антенны (патент РФ №2327264 от 07.11.2006) [1], включающее опорную стойку и закрепленные на ней механизмы ориентации антенны по азимуту и углу места, на опорной стойке установлена при помощи стяжек плита с возможностью поворота относительно опорной стойки, продольного перемещения по ней и фиксации, а механизмы ориентации антенны по азимуту и углу места объединены и выполнены в виде шарнирно соединенных между собой рамы, снабженной элементами крепления антенны, и платы, закрепленной на плите с возможностью поворота в плоскости параллельной плите, и кинематически связанных между собой и плитой жесткими тягами с регулировочными гайками.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, принятого за прототип, относится то, что в известном устройстве при его использовании нет возможности менять положения детекторов вдоль горизонтальной плоскости, нет возможности точной регулировки (подстройки) положения детекторов по оси Z в вертикальной плоскости, отсутствуют элементы, гасящие вибрации.
Сущность изобретения заключается в создании устройства, обеспечивающего надежное крепление и точную ориентацию детекторов по отношению к исследуемому объекту, определение пространственных координат детекторов, а также обеспечивающее снижение вибрации детекторов.
Техническим результатом при решении данной задачи является получение точных данных с детекторов, обладающих минимальной случайной погрешностью.
Указанный технический результат при осуществлении изобретения достигается тем, что в предлагаемом устройстве для крепления и ориентации детекторов, включающем опорную стойку, механизмы ориентации по углу места, механизмы подстройки, элементы крепления, фиксации и регулировки, угловые шкалы, новым является то, что опорная стойка смонтирована на несущем блоке, а на самой опорной стойке смонтирован поворотно-фиксирующий узел, состоящий из двух втулок, скрепленных металлическими планками винтовым соединением, жестко закрепленных к втулкам по одной вилке соединения типа «ухо-вилка», закрепленных к этим вилкам винтовых регуляторов, закрепленной к этим вилкам вертикальной оси, кроме этого, к втулкам закреплены три пластинчатых элемента, которых охватывают две зажимные ленты, сами ленты одним концом зафиксированы на вертикальной оси, а другим концом, через пальцы сочленены с кулачками-эксцентриками, которые своими центрами вращения насажены на вертикальную ось, в хвостовики кулачков-эксцентриков упираются торцевые концы винтовых регуляторов, при этом, профиль рабочих поверхностей кулачков-эксцентриков в плане, представляет собой наружную границу логарифмической спирали с коэффициентом роста |q|>1, сам поворотно-фиксирующий узел опирается на регулировочный полый винт, опорная гайка которого закреплена на опорной стойке, вилки поворотно-фиксирующего узла посредством соединения типа «ухо-вилка» скреплены с закрепленными на телескопической стреле и телескопической штанге проушинами, телескопическая стрела и телескопическая штанга образуют консольный узел, путем сочленения под острым углом соединением типа «ухо-вилка», причем проушина этого соединения скреплена со штоком амортизатора, который закреплен на торце выдвижной секции телескопической штанги и выполнен с переменной жесткостью, зависящей от устанавливаемой длины телескопической стрелы, к выдвижной секции телескопической стрелы закреплен корректировочный узел, состоящий из трех поворотных в разных плоскостях элементов, с корректировочным узлом жестко соединена панель крепления детекторов, на выдвижной секции телескопической стрелы нанесена линейная шкала длины стрелы, вне устройства смонтированы линейная шкала координатной вертикальной оси Z и горизонтальная линейная корректировочная шкала центра координат, вилки всех соединений типа «ухо-вилка» выполнены разборными, и в них смонтированы компенсаторы зазоров.
При исследовании отличительных признаков описываемого устройства не выявлено каких-либо аналогичных известных решений, касающихся устройств для крепления детектора (ов) и предназначенных:
- для точной ориентации детекторов по отношению к исследуемым объектам;
- для определения пространственных координат детекторов;
- для снижения вибраций детекторов.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволили установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения.
Следовательно, заявленное изобретение соответствует условию «новизна».
Для проверки соответствия заявленного изобретения условию "изобретательский уровень" заявитель провел дополнительный поиск известных решений, чтобы выявить признаки, совпадающие с отличительными от прототипов признаками заявленного изобретения. Результаты поиска показали, что заявленное изобретение не вытекает для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований для достижения технического результата. В частности, заявленным изобретением не предусматриваются следующие преобразования:
- дополнение известного средства какой-либо известной частью, присоединяемой к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- замена какой-либо части известного средства другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такой замены;
- увеличение количества однотипных элементов действий, для усиления технического результата, обусловленного наличием в средстве именно таких элементов действий;
- выполнение известного средства или его части из известного материала для достижения технического результата, обусловленного известными свойствами этого материала;
- создание средства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, рекомендаций, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого средства и связей между ними.
Описываемое изобретение не основано на изменении количественного признака, представлении таких признаков во взаимосвязи, либо изменении ее вида.
Следовательно, заявленное изобретение соответствует условию "изобретательский уровень".
Перечень фигур.
На чертежах представлено
1) Пример осуществления изобретения.
2) Конструкция устройства для крепления и ориентации детекторов.
3) Устройство поворотно-фиксирующего узла.
4) Принцип фиксации поворотно-фиксирующего узла.
5) Устройство разборной вилки. *
6) Устройство амортизатора.
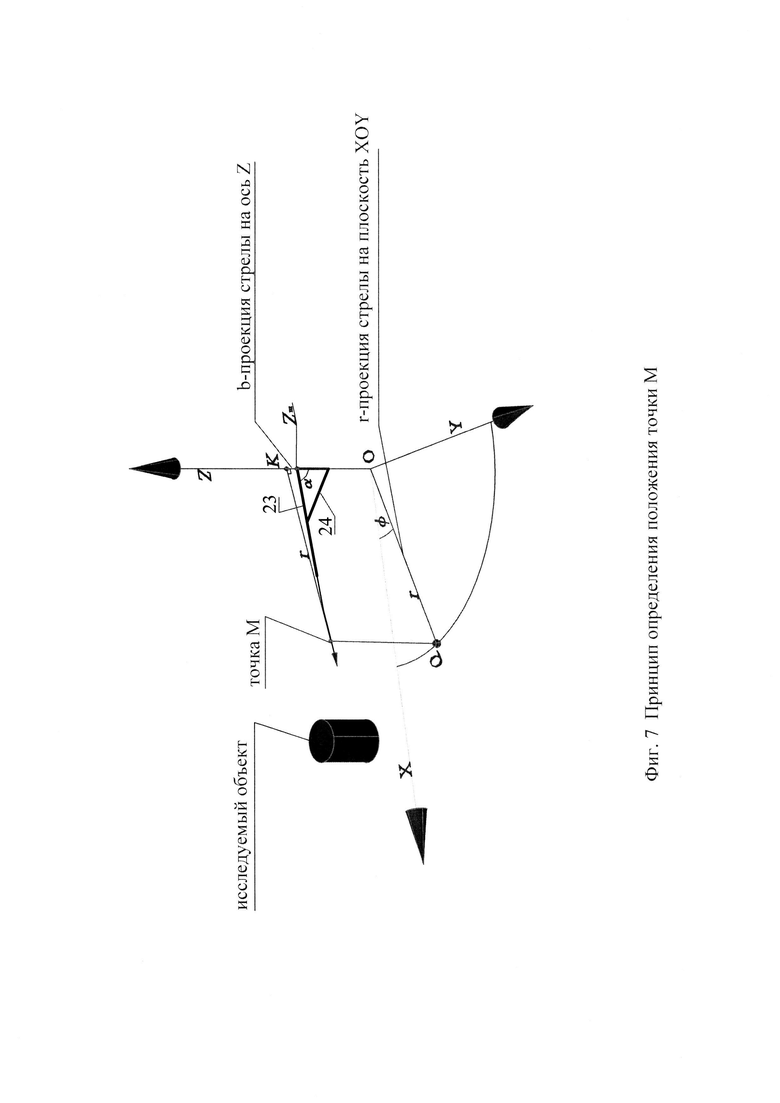
7) Принцип определения положения точки М.
8) Расчетный блок для определения координат точки М.
9) Расчетный блок для определения показаний шкал.
Сведения, подтверждающие возможность осуществления изобретения с получением вышеуказанного технического результата, заключаются в следующем.
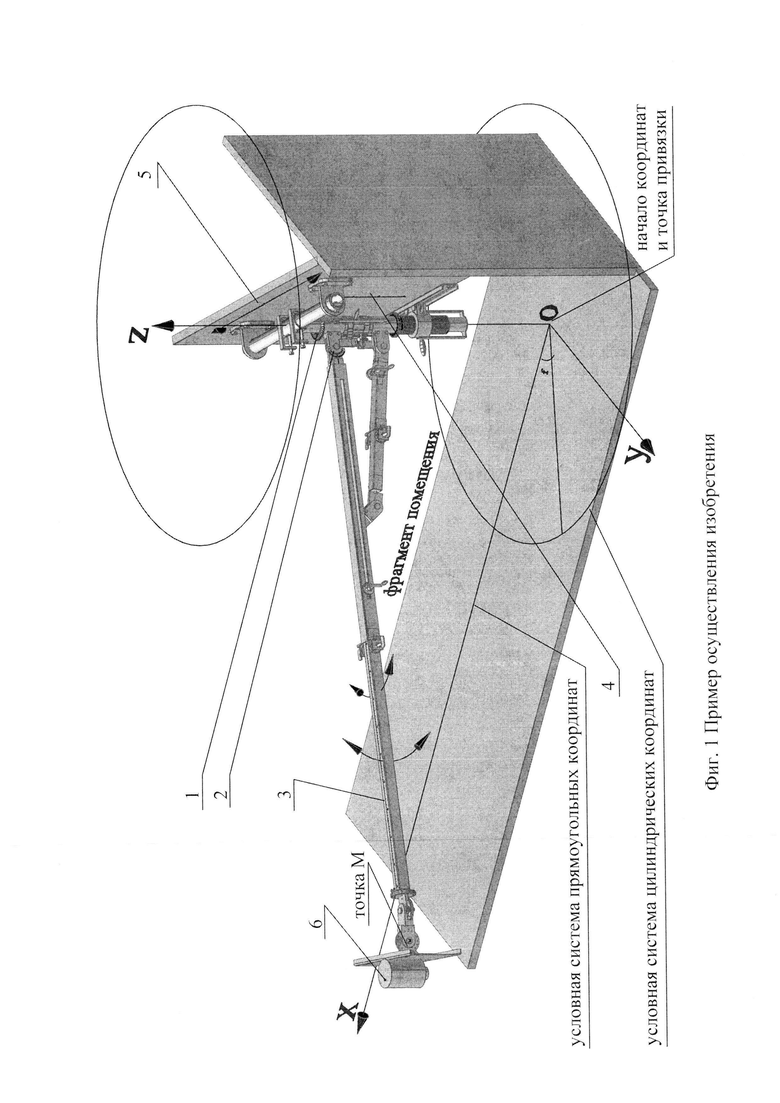
На фиг. 1 изображен пример осуществления изобретения. Устройство для крепления и ориентации детекторов установлено в некотором помещении, при этом помещение и предлагаемое устройство «помещены» в условное местное связанное между собой прямоугольное и цилиндрическое координатное пространство. Начало координат О «привязано» к некоторой точке помещения (привязка может быть осуществлена к любым удобным для дальнейшего расчета точкам). В координатном пространстве определяются текущие координаты условной точки М. Устройство имеет угловые и линейные шкалы. Положение точки М в условном местном координатном пространстве определяется (рассчитывается) по азимутальной шкале (1), по шкале угла места (2), по линейной шкале вылета стрелы (3) и по шкале установки по оси Z (4). По корректировочной шкале (5) осуществляется перенос центра координат в направлениях, указанных стрелками. Сама точка М жестко связанна с положением детектора (6), поэтому текущие координаты детектора жестко связаны с текущими координатами точки М (на фиг. 1 показан 1 детектор). Стрелками показаны направления поворота детектора (6) в вертикальной и горизонтальной плоскостях. Координатные пространства, показанные на фиг. 1, по известным алгоритмам [2] могут быть «привязаны» к другим координатным пространствам, например, к координатным осям здания или сооружения. Более подробно принцип определения координат представлен в разделе «Работа устройства».
Крепление предлагаемого устройства, как показано на фиг. 1, не является единственным вариантом установки. Устройство для крепления и ориентации детекторов может крепиться к стене, к внутренним колоннам помещения, может быть смонтировано на штанге, закрепленной между полом и потолком, может быть установлено на подвижное шасси и др. Информация о детекторе (6) в данном описании не приводится, так как суть изобретения она не раскрывает.
На фиг. 2 изображена конструкция устройства для крепления и ориентации детекторов. Устройство состоит из следующих узлов.
Несущего блока, имеющего две проушины (7), жестко закрепленные на пятах (8) и направляющую (9), закрепленную к проушинам (7) винтовым соединением (10). Назначение несущего блока - крепление всей конструкции, к какой либо основе (стена, колонна и др.).
Опорной стойки, состоящей из вертикальной опоры (11), жестко прикрепленной к втулке (12), снабженной фиксаторами (13), регулировочного полого винта (14), опорной гайки (15), к которой закреплены удерживающая рукоятка (16) и ролики (17), которые упираются в направляющую (18) (направляющая (18) крепится к какой либо основе, например, к стене). Опорная гайка (15) жестко соединена с вертикальной опорой (11). На опорной стойке монтируются поворотно-фиксирующий узел, описываемый ниже, также с помощью опорной стойки производится корректировка вертикального положения опоры (11) и корректировка положения центра координат на горизонтальной плоскости в направлениях, указанных на фиг. 1.
Поворотно-фиксирующего узла, состоящего из двух втулок (19), скрепленных винтовым соединением металлическими планками (20), жестко закрепленных к торцам втулок (19) трех пластинчатых элементов (21), двух жестко закрепленных к втулкам (19) разборных вилок (22) и закрепленных к этим вилкам деталей фиксации (конструкция, которых будет приведена ниже на фиг. 3). Опорой поворотно-фиксирующего узла является полый винт (14). Поворотно-фиксирующим узлом производится установка по азимутальному углу с последующей фиксацией.
Консольного узла, состоящего из телескопической стрелы (23), телескопической штанги (24), сочлененной под острым углом с телескопической стрелой (23) посредством соединения типа «ухо - вилка» (25). К торцу выдвижной секции (26) стрелы (23) жестко закреплен крепежный переходник (27). Телескопическая стрела (23) имеет механизм подстройки вылета стрелы (28), находящийся внутри стрелы и конструктивно выполненный на основе кинематической пары, состоящей из двух конических зубчатых колес, а телескопическая штанга (24) снабжена червячным механизмом (29), регулирующим длину телескопической штанги и тем, самым осуществляющем регулировку положения телескопической стрелы (23) по углу места (устройство механизмов (28) и (29) в данном описании не приводится и на "изобретательский уровень" они не претендуют). Позицией (30) обозначены фиксаторы положения по длине (вылету) стрелы и штанги. Соединение консольного узла с поворотно-фиксирующим узлом осуществлено через жестко закрепленные к телескопической стреле и телескопической штанге проушины (31) соединением типа «ухо-вилка». На выдвижной секции (32) телескопической штанги (24) закреплен амортизатор (33). Назначение консольного узла - настройка положения детектора (6) вдоль горизонтальной плоскости и по углу места.
Корректировочного узла, состоящего из поворотных элементов (34), (35), (36) и прикрепленной к элементу (36) панели крепления детекторов (37). Крепление корректировочного узла к стреле (23) осуществлено через переходник (27). С помощью корректировочного узла производится окончательная установка детектора в нужном пространственном положении.
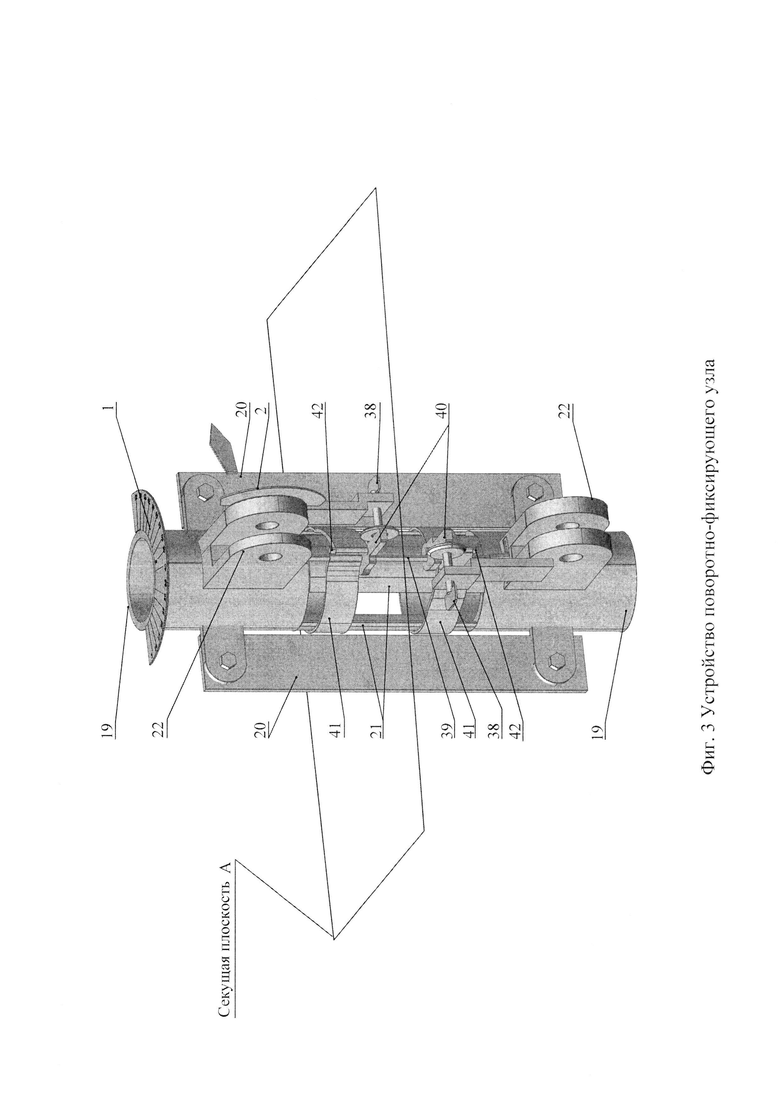
На фиг. 3 представлено устройство поворотно-фиксирующего узла. К боковым сторонам вилок (22) жестко закреплены винтовые регуляторы (38), а между вилками (22) закреплена вертикальная ось (39) на которую «посажены» зажимные кулачки-эксцентрики (40) (далее по тексту «кулачки») с возможностью поворачиваться на оси (39). Торцевые концы винтовых регуляторов (38) упираются в хвостовики кулачков (40). С наружной стороны пластинчатых элементов (21) смонтированы ленты (41), которые одним концом зафиксированы на оси (39), а другим концом, через пальцы (42) сочленены с кулачками (40). Ленты (41) и кулачки (40) удерживаются от «сползания» вниз при повороте втулок (19) вокруг вертикальной опоры (11) (см. фиг. 2) за счет небольшого натяга ленты (41). Особенностью конструкции зажимных кулачков является профиль их рабочих поверхностей в плане, которая представляет собой наружную границу логарифмической спирали с коэффициентом роста q>1 - правая спираль и q<1 - левая спираль (расчет и построение спиралей производился по алгоритмам, приведенным в [2]), модули q равны. Правая спираль - для верхнего кулачка, левая - для нижнего. Применение кулачков с данным профилем позволяет не только надежно фиксировать узел в каком-либо положении, но и гасить колебания при боковом (горизонтальном) воздействии силы на телескопическую стрелу. Пояснение принципа фиксации поворотно-фиксирующего узла пояснено на фиг. 4. Для формирования чертежа фиг. 4 на фиг. 3 показана секущая плоскость А.
На фиг. 4 схематично показан принцип фиксации поворотно-фиксирующего узла и пример «работы» верхнего кулачка (40). Также на фиг. 4 представлен принцип формирования профиля кулачка при обработке заготовки по шаблону. В исходном положении кулачек (40) своей рабочей поверхностью, с относительно малым усилием прижат к пластинчатому элементу (21). При фиксации узла, вращают винтовой регулятор (38) (см. фиг. 3), который своим торцевым концом упирается в хвостовик кулачка (40), при этом кулачек (40) поворачивается влево и деформирует пластинчатый элемент (21) и одновременно натягивает ленту (41), а лента (41) за счет натяжения прижимает остальные элементы (21) к вертикальной опоре (11) (см. фиг. 2) и тем самым поворотно-фиксирующий узел удерживается от поворота вокруг опоры (11). Для поворота телескопической стрелы (23) на нужный угол (или нужное положение), винтовым регулятором (38) ослабляют усилие на кулачек (40), это ослабляет натяжение ленты (41) и уменьшает деформацию элементов (21), что приводит к уменьшению усилия прижатия их к вертикальной опоре (11). При воздействии на телескопическую стрелу (23) (см. доп.фиг. 1 и фиг. 2) в положении фиксации поворотно-фиксирующего узла некоторой паразитной силы, например, при боковым толчке справа, воздействие передается через вилку (22) и винтовой регулятор (38) на кулачек (40), который еще больше поворачивается влево и тем самым еще больше деформирует пластинчатый элемент (21) и дополнительно увеличивает натяжение ленты (41), а та в свою очередь, увеличивает силу прижатия остальных элементов (21) к вертикальной опоре (11) и за счет этого поворотно-фиксирующий узел удерживается от поворота вокруг вертикальной опоры (11). Сила, с которой пластинчатые элементы (21) прижимаются к опоре (11) зависит от натяжения ленты (41), а натяжение ленты (41), в свою очередь, зависит от величины прикладываемой паразитной силы. По окончании действия паразитной силы, воздействие на кулачек (40) прекращается, а созданное натяжение ленты (41) возвращает кулачек (40) в положение фиксации. Тем самым гасятся колебания стрелы (23) в горизонтальной плоскости. Нижний кулачек (40), при описанном воздействии, остается в положении фиксации. Если воздействие происходит слева, аналогично «работает» нижний кулачек (40).
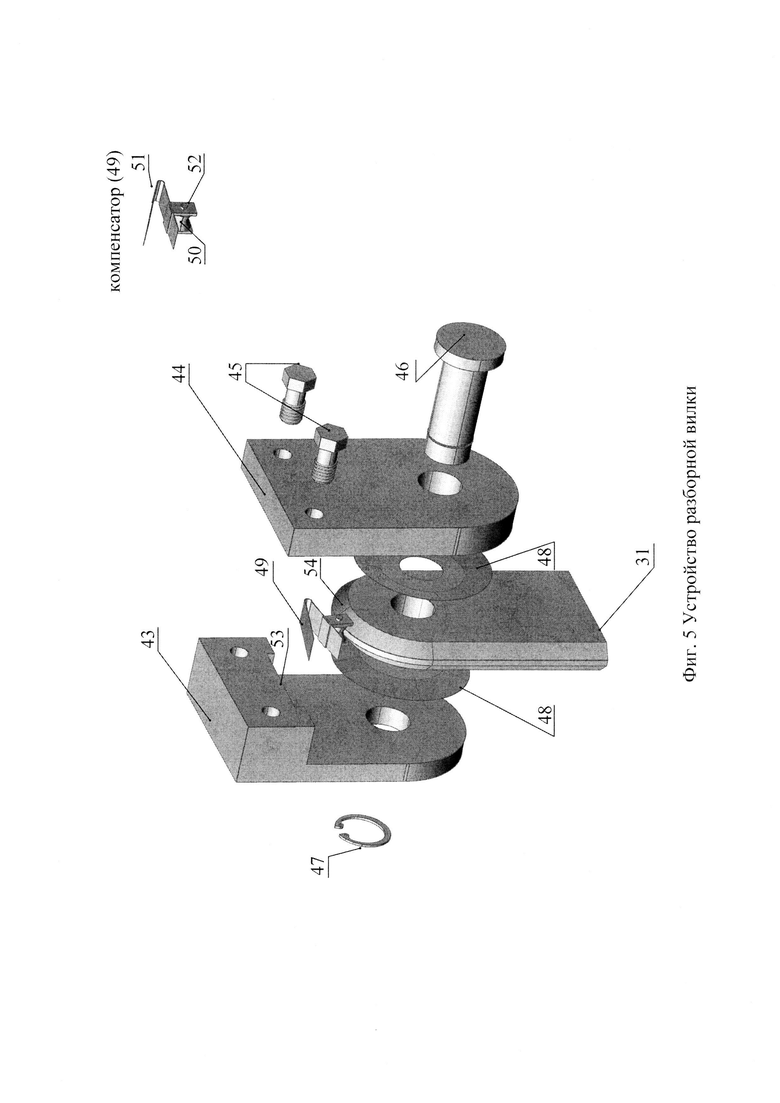
На фиг. 5 представлена конструкция разборной вилки (22). Разборная вилка состоит из двух щек (43) и (44), которые скрепляются болтами (45). Крепление проушины (31) к разборной вилке (22) выполнено пальцем (46), зафиксированным от осевого смещения эксцентрическим пружинным кольцом (47). По внутренним торцам проушины (31) установлены тарельчатые пружины (48). Дополнительно проушина (31) поджата компенсатором (49), состоящим из ролика (50) с двумя встречными коническими дорожками, плоской изогнутой пружины (51) и вилочного держателя (52). Для фиксации компенсатора (49) в щеке (43) выполнена проточка (53). Для прилегания ролика (50) у проушины (31) выполнены фаски (54). Особенностью конструкции разборной вилки (22), помимо тарельчатых пружин (48), компенсирующих зазоры между проушиной (31) и внутренними сторонами щек (43) и (44), является применение компенсатора (49), позволяющего в заданном диапазоне поворота проушины (31) постоянно «прижимать» проушину (31) к пальцу (46), что позволяет более точно настраивать телескопическую стрелу (23) (см. фиг. 1, 2) по углу места.
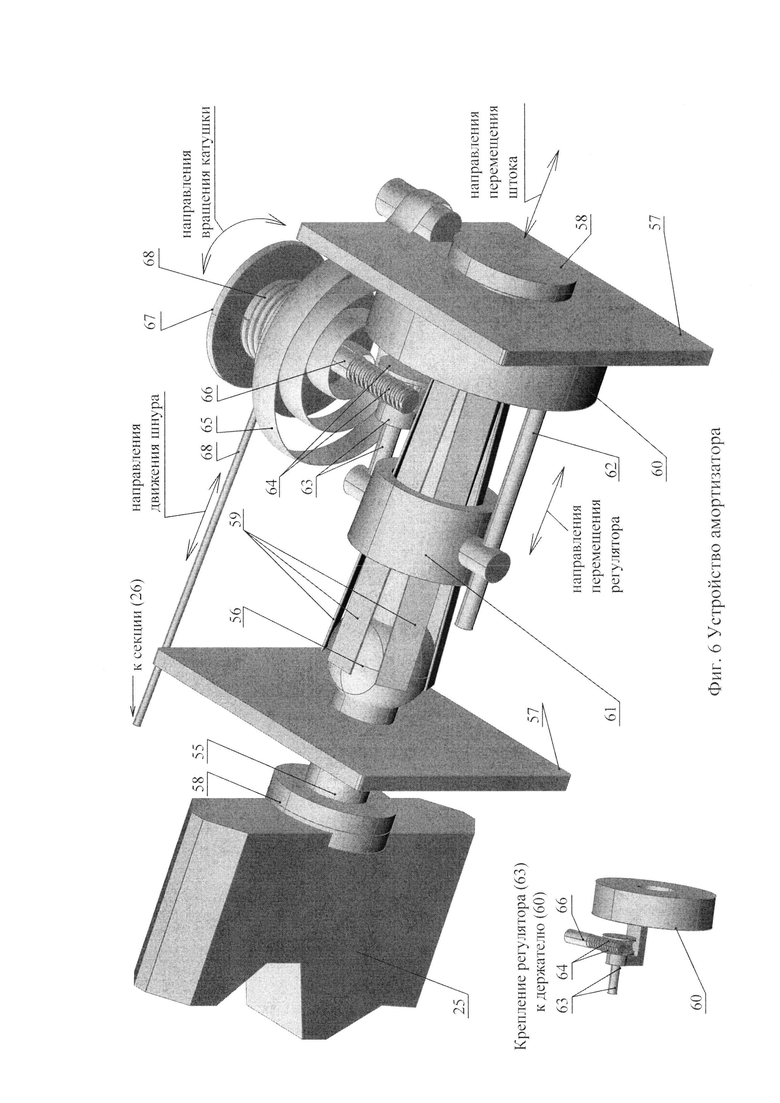
На фиг. 6 показано устройство амортизатора (33) (вид без корпуса). Соединение типа «ухо - вилка» (25) скреплено с торцом штока (55) на котором жестко зафиксирован шаровой элемент (56), шток может смещаться вдоль своей продольной оси в направлениях, указанных стрелками, при этом, величина перемещения ограничена стенками (57) и закрепленными на штоке (55) кольцами (58). К шаровому элементу (56) прижаты плоские прямые пружины изгиба (59), концы пружин (59) закреплены в держателе (60), который имеет форму кольца и закреплен на стенке (57). На держателе (60) смонтирован регулятор жесткости пружин (59), состоящий из следующих деталей и соединений: упора (61), который выполнен в виде втулки с внутренним коническим отверстием и удерживается на направляющей (62) с возможностью свободного перемещения вдоль нее без перекосов; регулятора длины перемещения (63), который перемещает упор (61) вдоль пружин (59) по направляющей (62) (сам регулятор (63) представляет собой кинематическую пару типа «винт-гайка»); червячной пары (64); плоской спиральной пружины (65), один конец которой закреплен на валу (66), а второй на стенке (57); катушки (67) с запасом капронового шнура (68), свободный конец которого закреплен к выдвижной секции (26) стрелы (23). Амортизатор выполнен с переменной жесткостью. Назначение амортизатора (33) - гашение колебаний детектора (ов) (6) в вертикальной плоскости. Принцип работы амортизатора будет представлен в разделе «Работа устройства»
Работа устройства. На фиг. 7 схематично представлен принцип определения положения точки М в пространстве, который поясняет порядок определения пространственных координат детекторов с помощью устройства. В качестве координатного пространства выбраны цилиндрические координаты и связанные с ними прямоугольные координаты. Из теории известно, что положение точки М в пространстве можно определить ее аппликатой Mz=OK и ее полярными координатами r=OQ, ϕ=∠XOQ ее проекции Q на плоскость XOY [2]. Величины r, ϕ, z являются цилиндрическими или полуполярными координатами интересующей точки М. Прямоугольные и цилиндрические координаты точки М, при совпадении начала О с полюсом и оси ОХ с полярной осью, связаны соотношениями [2]:

где ϕ - азимутальный угол (ϕ=∠XOQ); r - длина проекции стрелы (отрезок ZшМ) на плоскость XOY, при этом аппликаты в обеих системах одинаковы. Исходя из требований по установки детектора в определенной точке пространства относительно исследуемого объекта, стрела (23) предлагаемого устройства может поворачиваться в вертикальной плоскости, поэтому в расчеты дополнительно введен угол места α, на который стрела (23) поворачивается относительно оси Z (см. фиг. 1 и 2). Поворот стрелы по углу места а позволяет при настройке сократить перемещения по оси Z и использовать вертикальную опору (11) меньших размеров.
Детектор (6) закрепляется на устройстве в непосредственной близости от точки М на панели (37) (см. доп.фиг. 1 и фиг. 2), которая механически связана со стрелой (23), при этом устройство снабжено линейными шкалами, по которым определяют: длину стрелы  (в мм); положение начала стрелы Zш (в мм) в вертикальной плоскости на оси Z; и угловыми шкалами, по которым определяют поворот стрелы по углу места α (в градусах) и поворот стрелы по азимуту ϕ (в градусах). Данные для расчета получают путем визуального снятия показаний с линейных и угловых шкал, координатами детектора при этом являются координаты связанной точки М. Координаты рассчитываются следующим образом. Координата Mz по оси Z рассчитывается как сумма или разность значений отметки Zш и проекции стрелы b=К Zш на ось Z:
(в мм); положение начала стрелы Zш (в мм) в вертикальной плоскости на оси Z; и угловыми шкалами, по которым определяют поворот стрелы по углу места α (в градусах) и поворот стрелы по азимуту ϕ (в градусах). Данные для расчета получают путем визуального снятия показаний с линейных и угловых шкал, координатами детектора при этом являются координаты связанной точки М. Координаты рассчитываются следующим образом. Координата Mz по оси Z рассчитывается как сумма или разность значений отметки Zш и проекции стрелы b=К Zш на ось Z:

где b определяется как:

где α - угол места, град.; - длина стрелы, мм. Для удобства настройки шкала угла места разбита на два одинаковых диапазона - «0-90°», поэтому длина проекции стрелы b на ось Z и длина проекции стрелы на плоскость XOY определяется через угол (90°-α). Координаты по осям X и Y определяются как произведения длины проекции стрелы r на плоскость XOY на синус и косинус азимутального угла ϕ по формуле 1, где:

С помощью устройства выполняется два варианта настройки (все операции по настройке выполняются «вручную»). В первом варианте при настройке дополнительно производится определение координат детектора (ов). Детектор (6) устанавливается на некотором расстоянии от объекта исследования или интересующей области этого объекта. Для этого детектор выставляется по азимуту путем поворота поворотно-фиксирующего узла, для чего «ослабляются» винтовые регуляторы (38) (фиг. 3), поворотно-фиксирующей узел поворачивают в нужном направлении на необходимый угол (р, далее регуляторами (38) поворачивают кулачки (40) и тем самым, фиксируют поворотно-фиксирующий узел на опоре (11). Затем с помощью секции (26) устанавливают нужную длину телескопической стрелы (23) (фиг. 2) с фиксацией элементами (30). При необходимости, стрелу (23) поднимают путем изменения длины телескопической штанги (24) с помощью секции (32), которую двигают червяным механизмом (29) и тем самым, стрелу (23) устанавливают по углу места а с фиксацией элементами (30). Для более точной установки длины телескопической стрелы (23) применяют механизм подстройки (28), при этом элементы (30) немного «ослабляют», а после завершения подстройки опять переводят их в положение фиксации. Для подстройки положения детектора по вертикали применяют полый винт (14) (фиг. 2), для этого «ослабляют» регуляторы (38). Элементами (34), (35) и (36) (фиг. 2) корректируют окончательное положение детектора. Элементом (34) производится корректировка путем поворота в плоскости перпендикулярной телескопической стреле (23), элементом (35) производится корректировка по азимуту, а элементом (36) по углу места. На шкалах элементов (35) и (36) нанесены соответственно поправочные значения для азимутальной шкалы и шкалы угла места. В зависимости от положения элементов (35) и (36) окончательные значения углов для дальнейшего расчета получают путем прибавления или вычитания поправочных значений, при этом диапазон поправочных значений составляет несколько градусов. Сами шкалы на элементах (35) и (36) из-за малых размеров на фигурах не приводятся. После установки детектора в нужном положении фиксируются показания линейных и угловых шкал, а затем производится расчет координат. Во втором варианте настройки детектор устанавливается в нужных координатах (в заранее определенных). Здесь все операции по настройке и регулировке такие же, как при определении координат, только настройка производится по шкалам.
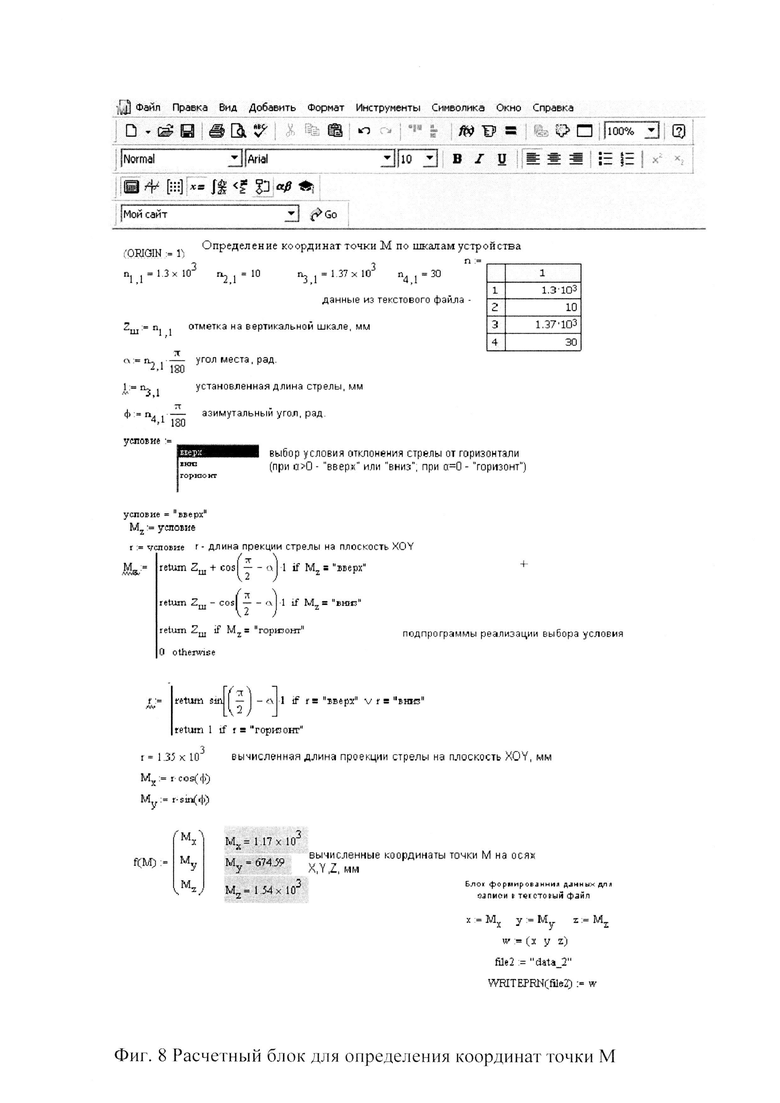
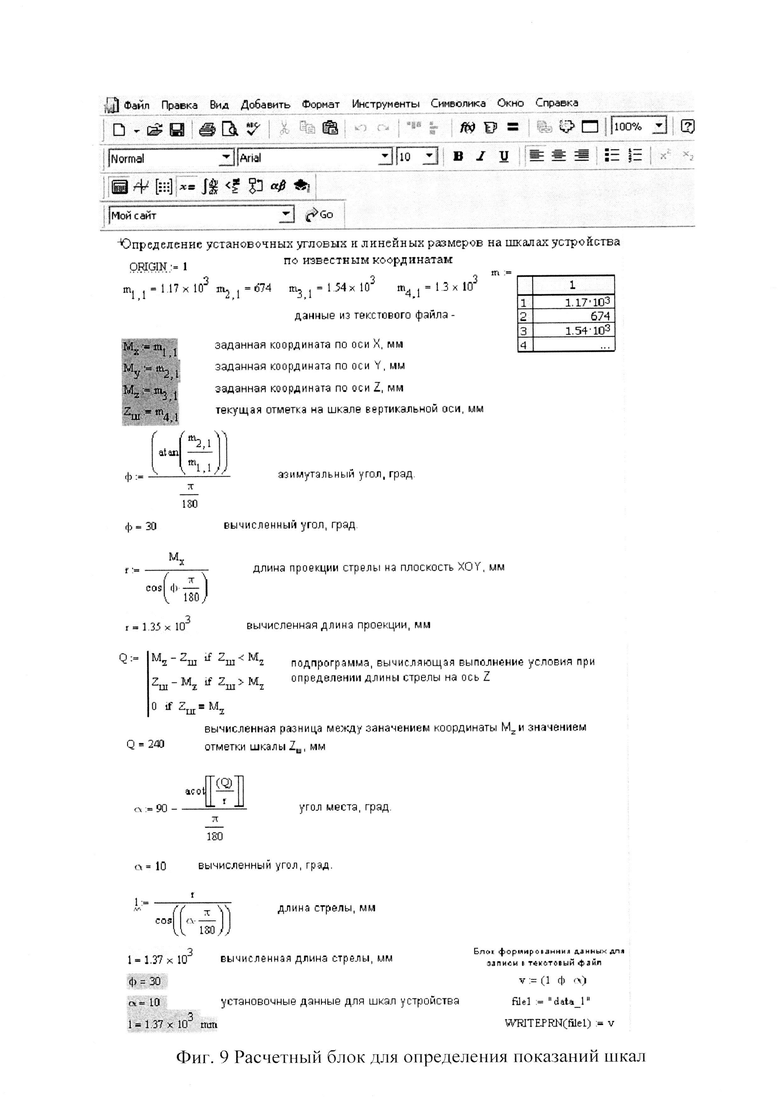
На фиг. 8 и фиг. 9 представлены расчетные блоки, выполненные в программе Mathcad и предназначенные для расчета на ПЭВМ координат точки М (для детектора) и установочных данных для шкал устройства. Блоки разработаны на основе математических алгоритмов определения положения интересующей точки в пространстве в цилиндрических и связанных с ними прямоугольных координатах [2]. На фиг. 8 представлен расчетный блок для определения координат точки М. Расчетный блок снабжен компонентом, с помощью которого производится выбор условия положения стрелы относительно ее горизонтали и двумя подпрограммами реализации выбора этого условия, результатами вычисления которых является определение координаты Mz и длины проекции r телескопической стрелы (23) на плоскости XOY. Исходные данные со шкал записываются в текстовый файл (с расширением «.prn»), связанный с файлом расчетного блока. При открытии файла с расчетным блоком в программе Mathcad производится автоматическое вычисление координат, которые записываются в другой текстовый файл с расширением «.prn», как результат расчета. На фиг. 9 представлен расчетный блок для определения установочных данных шкал устройства по известным (заданным) координатам. В этом расчетном блоке решается «обратная» задача, при этом блок снабжен подпрограммой вычисляющей условие определения длины проекции телескопической стрелы на ось Z с учетом текущего значения на этой шкале. Процесс записи исходных данных и получения результата аналогичен тому, как он реализован в расчетном блоке для определения координат.
В процессе эксплуатации детекторы испытывают вибрации, которые передаются им через устройство для крепления и ориентации детекторов, например, от технических средств, перемещающих объекты исследования к детектору (или мимо него). При этом вибрация негативно влияет на точность данных, которые формируют детекторы. Наибольшие колебания детекторы испытывают в вертикальной плоскости. Если отдельно рассматривать стрелу (23) с закрепленным детектором (6) (см. доп. фиг. 1 и 2), то согласно теории [3] ее допустимо представить, как систему с одной степенью свободы в виде балки с защемленным концом (защемление преднамеренно имитируется в месте соединения стрелы (23) с втулкой (19) поворотно-фиксирующего узла), на другом конце которой закреплен груз (детектор). Амплитуда колебаний груза (детектора), вызванных периодической возмущающей нагрузкой в такой системе будет зависеть от величины груза, длины балки и величины возмущающей силы, а время затухания колебаний и уменьшения амплитуды колебаний будут зависеть от величины сил сопротивления колебаниям [3]. В процессе эксплуатации устройства, в зависимости от необходимого положения детектора (6), стрела (23) может изменять свою длину, при этом будет меняться и амплитуда колебаний (больше вылет стрелы - больше амплитуда, меньше вылет стрелы - меньше амплитуда). Чтобы для любого вылета стрелы (23), время затухания было одинаковым, нужны переменные значения сил сопротивления колебаниям. Для создания переменных сил сопротивления колебаниям в конструкции предлагаемого устройства применен амортизатор (33), причем в зависимости от длины стрелы (23), амортизатор (33) изменяет и силу сопротивления (больше длина - больше сила сопротивления, меньше длина - меньше сила сопротивления), то есть амортизатор меняет свою жесткость.
Работа амортизатора основана на том, что при движении штока (55), амортизирующая сила (сила сопротивления) складывается из силы давления пружин (59) на шаровой элемент (56)и силы трения скольжения между шаровым элементом и поверхностью пружин в точке касания. Причем при таком расположении контактирующих элементов (шарового элемента и пружин) сила трения скольжения будет пропорциональна силе давления [4], с увеличением силы давления - увеличивается сила сопротивления, с уменьшением силы давления - уменьшается сила сопротивления. Из литературы, содержащей расчетный и нормативный материал известно, что при действии поперечной силы давления, жесткость прямой пружины (59), может быть переменной, если она в процессе деформации будет последовательно касаться несколько упоров, что будет соответствовать изменению ее рабочей длины [5]. В предлагаемой конструкции амортизатора в качестве упоров используется внутренняя поверхность конического отверстия упора (61). Перемещение упора (61) в крайнее левое положение (см. фиг. 6) будет соответствовать максимальному вылету стрелы (23) (см. фиг. 1 и 2), а движения штока (55) с элементом (56)будут испытывать максимальное сопротивление, так как жесткости пружин (59) в данном положении будут иметь наибольшие значения. При наименьшем вылете стрелы (23), упор (61) установится в крайнее правое положение, а жесткости пружин (59) станут наименьшими. Перемещение упора (61) осуществляется следующим образом. При выдвижении секции (26) стрелы (23) шнуру (68) сообщается поступательное движение, которое приводит к вращению катушки (67), а та через вал (66) и червячную пару (64) передает вращение регулятору (63), который, в свою очередь, вращательное движение обращает в поступательное движение влево упора (61), при вращении катушки (67) дополнительно закручивается пружина (65). При укорачивании стрелы (23), вращательное движение червячной паре (64) сообщается пружиной (65), которая перед этим была закручена, и которой был сообщен противодействующий момент. Далее, как и при удлинении стрелы (23) вращательное движение через регулятор (63) обращается в поступательное движение вправо упора (61). Применение амортизатора (33) с переменным сопротивлением движению штока (55) позволяет при любом размере вылета стрелы (23), гасить колебания практически за одинаковые промежутки времени, а это, в свою очередь, дает возможность с высокой долей достоверности отсеивать помеховые составляющие получаемых с детекторов данных.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании в заявленном изобретении следующей совокупности условий:
• средство, воплощающее заявленное изобретение при его осуществлении, расширяет существующий арсенал устройств, предназначенных для точной ориентации регистрирующих устройств по отношению к исследуемым объектам;
• для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте изложенной формулы, подтверждена возможность его осуществления с помощью приведенного в заявке описания конструкции и принципа действия;
• средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить достижение усматриваемого заявителем технического результата, а именно: получение точных данных, обладающих минимальной погрешностью. Следовательно, заявленное изобретение соответствует условию «промышленная применимость».
Источники информации
1. Злотенко Алексей Владимирович, Антипьев Александр Иванович, Головенкин Евгений Николаевич, Кораблев Александр Васильевич, Тестоедов Николай Алексеевич, Опорно-поворотное устройство антенны, патент РФ на изобретение №2327264 от 07.11.2006, МПК H01Q 3/08.
2. Выгодский М.Я. Справочник по высшей математике. - М: «Наука»., 1973 г., 872 стр. с илл.
3. Дарков А.В., Шпиро Г.С. Сопротивление материалов. - М: «Высшая школа»., 1965 г., 762 с. с илл.
4. Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов. - 4-е изд., перераб. и доп. - М.: Наука. Гл. ред. Физ.-мат. лит., 1988. - 640 с.
5. Заплетохин В.А. Конструирование деталей механических устройств: Справочник. - Л.: Машиностроение. Ленингр. отд-ние, 1990. - 669 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для монтажа секций механизированной крепи и конвейера | 1982 |
|
SU1084455A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПО АНАЛИТИЧЕСКОЙ ИНФОРМАЦИИ КОМПЕНСАТОРНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2126305C1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Транспортное средство для перевозки аварийных транспортных средств | 1991 |
|
SU1830014A3 |
| Секатор для среза и съема лозы хмеля со шпалерной проволоки | 2017 |
|
RU2672405C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Стенд для испытания амортизаторов | 1985 |
|
SU1326940A1 |
| ЗАПОРНАЯ АРМАТУРА И УСТРОЙСТВО ДЛЯ ЕЕ ПРИНУДИТЕЛЬНОГО НАВЕДЕНИЯ НА УСТЬЕВОЕ ОБОРУДОВАНИЕ ОТКРЫТО ФОНТАНИРУЮЩЕЙ СКВАЖИНЫ | 1991 |
|
RU2010951C1 |


Изобретение относится к области техники, связанной с креплением и точной установкой регистрирующих устройств по отношению к исследуемым объектам, а также для определения пространственных координат регистрирующего устройства в некотором условном координатном пространстве, которое «привязано» к чему-либо, например к плану помещения, осям зданий и сооружений, к топографическому плану участка местности и др. Установка регистрирующего устройства может производиться и по известным (заранее рассчитанным) координатам. Функционирование предлагаемого устройства происходит в условиях воздействия негативных динамических нагрузок, которые вызывают вибрации регистрирующего устройства. Конструкция предлагаемого устройства позволяет с высокой точностью ориентировать регистрирующее устройство по отношению к исследуемому объекту и выполнена таким образом, что значительно снижает вибрации регистрирующего устройства.
Технический результат - получение точных данных с регистрирующих устройств, обладающих минимальной случайной погрешностью. 1 з.п. ф-лы, 9 ил.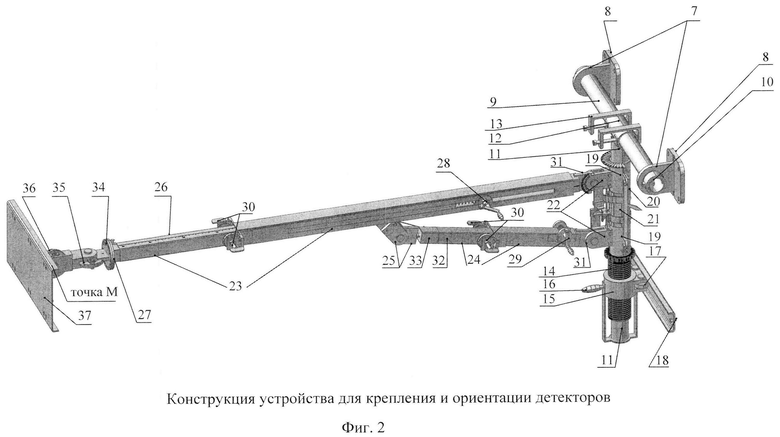
1. Устройство для крепления и ориентации детекторов, включающее опорную стойку, механизмы ориентации по углу места, механизмы подстройки, элементы крепления, фиксации и регулировки, угловые шкалы, отличающееся тем, что опорная стойка смонтирована на несущем блоке, а на самой опорной стойке смонтирован поворотно-фиксирующий узел, состоящий из двух втулок, скрепленных металлическими планками винтовым соединением, жестко закрепленных к втулкам по одной вилке соединения типа «ухо-вилка», закрепленных к этим вилкам винтовых регуляторов, закрепленной к этим вилкам вертикальной оси, кроме этого к втулкам закреплены три пластинчатых элемента, которых охватывают две зажимные ленты, сами ленты одним концом зафиксированы на вертикальной оси, а другим концом через пальцы сочленены с кулачками-эксцентриками, которые своими центрами вращения насажены на вертикальную ось, в хвостовики кулачков-эксцентриков упираются торцевые концы винтовых регуляторов, при этом профиль рабочих поверхностей кулачков-эксцентриков в плане представляет собой наружную границу логарифмической спирали с коэффициентом роста |q|>1, сам поворотно-фиксирующий узел опирается на регулировочный полый винт, опорная гайка которого закреплена на опорной стойке, вилки поворотно-фиксирующего узла посредством соединения типа «ухо-вилка» скреплены с закрепленными на телескопической стреле и телескопической штанге проушинами, телескопическая стрела и телескопическая штанга образуют консольный узел, путем сочленения под острым углом соединением типа «ухо-вилка», причем проушина этого соединения скреплена со штоком амортизатора, который закреплен на торце выдвижной секции телескопической штанги и выполнен с переменной жесткостью, зависящей от устанавливаемой длины телескопической стрелы, к выдвижной секции телескопической стрелы закреплен корректировочный узел, состоящий из трех поворотных в разных плоскостях элементов, с корректировочным узлом жестко соединена панель крепления детекторов, на выдвижной секции телескопической стрелы нанесена линейная шкала длины стрелы, вне устройства смонтированы линейная шкала координатной вертикальной оси Z и горизонтальная линейная корректировочная шкала центра координат.
2. Устройство для крепления и ориентации детекторов по п. 1, отличающееся тем, что вилки всех соединений типа «ухо-вилка» выполнены разборными, и в них смонтированы компенсаторы зазоров.
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО АНТЕННЫ | 2006 |
|
RU2327264C1 |
| Устройство для измерения темпе-РАТуРы и ОТбОРА пРОб МЕТАллА изКОНВЕРТОРА | 1979 |
|
SU813175A1 |
| ВОСКОВАНИЯ ТУШЕК птицы и | 0 |
|
SU164948A1 |
| Карбюратор | 1950 |
|
SU128709A1 |
| JP 60030202 A, 15.02.1985. | |||

