Изобретение относится к области ультразвукового (УЗ) неразрушающего контроля изделий, в частности железнодорожных рельсов. Способ может быть использован для обнаружения и оценки дефектов в головке, шейке и подошве рельсов, расположенных в окрестности плоскости симметрии рельса. Способ пригоден для дефектоскопии действующих рельсовых путей.
На железных дорогах РФ в последние голы изломы рельсов происходят в основном из-за дефектов в зоне плоскости симметрии рельса - головке, шейке и подошве рельсов, не обнаруженных действующими средствами дефектоскопии. Шейка рельса в известных дефектоскопах озвучивается только одним электроакустическим преобразователем (ЭАГТ), работающим в режиме излучения/прием УЗ-колебаний (т.е. реализуется эхо- и зеркально-теневой методы) и двумя наклонными ЭАП (углы ввода + и - 45 градусов), реализующими эхо-метод контроля. В результате, многие дефекты, имеющие небольшой наклон относительно вертикали (особенно в зоне сварки), пропускаются.
Известен [1, рис. 2.3.1] теневой способ обнаружения дефектов в плоскости симметрии рельса, заключающийся в том, что два ЭАП устанавливают с двух сторон рельса, направляют их по плоскости симметрии рельса друг на друга, перемещаясь вдоль рельса, излучают зондирующие УЗ-сигналы первым и принимают их вторым ЭАП, выявляют подозрительные участки рельса - по отсутствию УЗ-сигнала во втором ЭАП. Заметим, что отсутствие сигнала может быть вызвано как перекрытием дефектом пути УЗ зондирующему сигналу, так и потерей контакта ЭАП с рельсом.
Недостатками этого способа являются: необходимость установки ЭАП с двух сторон рельса, что невозможно в действующих путях, а также невозможность определения положения дефекта в рельсе.
Известен [1, рис. 2.3.4] зеркально-теневой способ обнаружения дефектов в рельсах, заключающийся в том, что на поверхности катания рельса устанавливают два наклонных ЭАП, направленные по плоскости симметрии рельса друг на друга с учетом отражения зондирующего сигнала от подошвы рельса, перемещаясь вдоль рельса, излучают зондирующие УЗ-сигналы первым и принимают их вторым ЭАП, выявляют подозрительные участки рельса - по отсутствию УЗ-сигнала на втором ЭАП. В этом случае причинами пропадания УЗ-сигнала, кроме отмеченных выше, могут явиться плохие отражающие свойства подошвы рельса (негладкость, коррозия и т.п.), приводящие к рассеянию зондирующего УЗ-сигнала. Обычно для таких зондирований используют углы ввода УЗ-колебаний около 45° излучающие и принимающие поперечные (сдвиговые) УЗ-колебания со скоростью распространения колебаний в рельсовой стали 3260 м/с. Если первый ЭАП способен принимать УЗ-сигналы, отраженные от дефекта, то появляется дополнительная возможность обнаружения дефектов эхо-способом [1, рис. 2.2.1] (при условии, что дефект не коллинеарен направлению зондирования), а также вычисления положения дефекта в рельсе.
Недостаток этого способа состоит в том, что расстояние между ЭАП оказывается значительным: так, при высоте рельса типа Р65 (самый распространенный тип рельса на российских железных дорогах) 180 мм и угле ввода 45° расстояние между ЭАП составит 360 мм. Такое расстояние делает затруднительным изготовление и установку большого, единого блока ЭАП, настройку направлений излучения ЭАП и обеспечение акустического контакта ЭАП с рельсом.
Как известно, ряд дефектов плохо обнаруживаются сдвиговыми (поперечными) ультразвуковыми колебаниями и надежно фиксируются продольными акустическими волнами со скоростью распространения в рельсе 5900 м/с. Поэтому, для обнаружения специфических дефектов в шейке рельса используется продольные УЗ-колебания, излучаемые прямым ЭАП нормально к поверхности сканирования (поверхности катания рельса) и переотраженные от подошвы рельса в пределах диаграммы направленности. При этом шейку рельса можно рассматривать как волновод, в котором наличие любых неоднородностей (дефектов) приводит к ослаблению амплитуды проходящих колебания до подошвы и обратно. Теоретически, продольные колебания формируются в пределах первого критического угла (для рельсовой стали от 0 до 37°, а сдвиговые - в пределах между первым и вторым критическим углами (до 72°). Практически, в пределах малых углов падения (0-10°) в стали существует только продольная волна [2, стр. 47].
Наиболее близким к заявляемому является способ обнаружения дефектов в рельсах [1, рис. 2.3.4], заключающийся в том, что устанавливают электроакустический преобразователь, направленный по плоскости симметрии рельса перпендикулярно поверхности его катания, перемещаясь вдоль рельса, электроакустическим преобразователем излучают зондирующие и принимают отраженные ультразвуковые сигналы, выявляют подозрительные участки рельса - по отсутствию отраженного сигнала и дефектные участки - на которых отраженный сигнал поступил раньше, чем ожидаемый сигнал от подошвы рельса, на дефектных участках вычисляют положение дефекта. Данный способ позволяет обнаруживать и определять глубину залегания дефектов эхо-способом (если дефект отражает зондирующий сигнал в направлении зондирующего ЭАП), а также выявить дефект зеркально-теневым способом, но без определения глубины его залегания. Установка ЭАП, направленного перпендикулярно поверхности катания рельса не требует использования акустических призм, настройки углов ввода, т.е. проста и дешева.
Недостатки данного способа состоят:
- в плохом обнаружении дефектов, ориентированных в рельсе вертикально (зондирующий сигнал параллелен дефекту и эхо-метод работает плохо);
- в невозможности определения положения дефекта в рельсе зеркально-теневым методом.
Задача, решаемая заявляемым способом, заключается в достоверном обнаружении дефектов разной ориентации в продольном сечении в окрестности плоскости симметрии рельса (головке, шейке и подошве) малогабаритным датчиком многоканального УЗ-дефектоскопа.
Для решения этой задачи в способе обнаружения дефектов в рельсах, заключающемся в том, что, устанавливают первый электроакустический преобразователь, направленный по плоскости симмегрии рельса перпендикулярно поверхности его катания, перемещаясь вдоль рельса, первым электроакустическим преобразователем излучают зондирующие и принимают отраженные ультразвуковые сигналы, выявляют подозрительные участки рельса - по отсутствию на них отраженного сигнала и дефектные участки - на которых отраженный сигнал поступил раньше, чем ожидаемый сигнал от подошвы рельса, на дефектных участках вычисляют положение дефекта в рельсе, при этом на поверхности катания рельса, в пределах зоны досягаемости диаграммы направленности зондирующих ультразвуковых сигналов первого электроакустического преобразователя отраженных от подошвы рельса, устанавливают дополнительные электроакустические преобразователи, направленные по плоскости симметрии рельса, каждым дополнительным электроакустическим преобразователем принимают отраженные ультразвуковые сигналы и выявляют подозрительные участки рельса - по отсутствию на них отраженного сигнала и дефектные участки - на которых отраженный сигнал поступил раньше, чем ожидаемый сигнал от подошвы рельса, на дефектных участках вычисляют положение дефекта в рельсе, совместно, с учетом относительного положения электроакустических преобразователей и скорости их перемещения, анализируют подозрительные участки рельса, обнаруженные всеми электроакустическими преобразователями, обнаруживают и определяют положение дефектов в рельсе.
Техническим результатом использования заявляемого способа является повышение достоверности обнаружения и определения положения дефектов в рельсе с использованием технологичного, малогабаритного искателя многоканального УЗ-дефектоскопа.
Как установлено автором с помощью моделирования и подтверждено экспериментально, отраженные сигналы от подошвы можно наблюдать не только на пьезопластине, периодически излучающей зондирующие колебания, но и в окрестности этого ЭАП. Для приема этих колебаний в заявляемом техническом решении предлагается использовать дополнительные ЭАП, расположенные на поверхности катания вдоль продольной плоскости в зоне действия диаграммы направленности излучаемой ЭАП и работающие только на прием отраженных (от подошвы и/или от дефектов) колебаний.
Заявляемый способ иллюстрируют следующие xthnt;b:
Фиг. 1 - cхема УЗ-прозвучивания рельса, где:
1. Первый ЭАП.
2. Дополнительные ЭАП (2-1 и 2-2).
3. Рельс.
4. Головка рельса.
5. Шейка рельса.
6. Подошва рельса.
7. Точка отражения донного сигнала.
8. Вертикальный дефект в головке рельса.
9. Вертикальный дефект в шейке рельса
10. Вертикальный дефект в подошве рельса.
11. Горизонтальный дефект в шейке рельса.
Фиг. 2 - cтруктурная схема УЗ-дефектоскопа, где:
12. Коммутатор.
13. Формирователь зондирующих сигналов.
14. Приемники отраженных УЗ-сигналов.
15. Сигнал управления коммутатором.
16. Компьютер.
17. Датчик пути - скорости (показан условно).
18. Канал связи со средствами отображения.
Существенными отличиями заявляемого способа по сравнению с прототипом являются:
на поверхности катания рельса устанавливают дополнительные ЭАП, наличие которых позволяет обнаруживать дефекты с разных углов УЗ зрения;
в прототипе используется лишь один ЭАП с ограниченными возможностями по обнаружению и определению положения дефектов в рельсе;
установка дополнительных ЭАП направленных по плоскости его симметрии позволяет использовать энергию первого ЭАП, а принимать зондирующие сигналы с нескольких направлений.
В прототипе используется лишь одно направление зондирования, а энергия излучения используется лишь по главному лепестку диаграммы направленности первого ЭАП.
Установка дополнительных ЭАП в пределах зоны досягаемости зондирующих ультразвуковых сигналов первого электроакустического преобразователя отраженных от подошвы рельса (зона BCDF, Фиг. 1) позволяет создать компактный УЗ измерительный блок с надежным акустическим контактом с поверхностью катания рельса. Такой блок мало подвержен влиянию негладкости поверхности катания рельса (мелкие поверхностные неровности рельса, в том числе стыки рельсов). Обычно используется диаграмма направленности зондирующего (первого) ЭАП с углом излучения ADF - 8-16 градусов. В принципе, можно выбрать более широкую диаграмму направленности первого ЭАП.
В прототипе используется лишь один излучающе/приемный ЭАП с границами диаграммы направленности в пределах зоны AEF, Фиг. 1.
Каждым дополнительным электроакустическим преобразователем принимают отраженные ультразвуковые сигналы, что позволяет расширить область обнаружения дефектов до BCDF, Фиг. 1.
В прототипе используется лишь один излучающе/приемный ЭАП с границами диаграммы направленности в пределах зоны AE (Фиг. 1).
Выявляют подозрительные участки рельса - по отсутствию на них отраженного сигнала. Название «подозрительные» связано с тем, что отсутствие сигнала, отраженного от подошвы рельса может быть связано как с дефектом (зеркально-теневой метод), так и с потерей контакта ЭАП с поверхностью рельса, рассеянием подошвы рельса и другими факторами. Таким образом, подозрительный участок требует дополнительного исследования.
В прототипе также обнаруживаются подозрительные участки, но возможности дополнительно исследовать их нет.
Обнаруживают дефектные участки рельса, на которых отраженный сигнал поступил раньше, чем ожидаемый сигнал от подошвы рельса, причем эти действия выполняют несколькими - дополнительными ЭАП с нескольких направлений, что повышает вероятность обнаружения разно ориентированных дефектов.
В прототипе используется лишь один излучающе/приемный ЭАП.
На дефектных участках вычисляют положение дефекта в рельсе по результатам измерений дополнительными ЭАП, что повышает вероятность обнаружения разно ориентированных дефектов.
В прототипе используется лишь один излучающе/приемный ЭАП.
Совместно, с учетом относительного положения электроакустических преобразователей и скорости их перемещения, анализируют подозрительные участки рельса, выявленные всеми ЭАП, и обнаруживают дефекты в рельсе. Совместный анализ результатов измерений всеми ЭАП позволяет повысить достоверность обнаружения реального дефекта, т.е. отличить его от других причин возникновения подозрительного участка.
В прототипе такой возможности нет.
Определяют положение дефектов в рельсе на основе совместного анализа подозрительных участков, т.е. в заявляемом устройстве появляется возможность сделать это зеркально-теневым методом.
В прототипе используется классический однолучевой зеркально-теневой метод, который не позволяет определить глубину залегания дефекта.
Рассмотрим возможность реализации заявляемого способа.
Заявляемый способ реализует дефектоскоп, структурная схема которого приведена на Фиг. 2. где:
Коммутатор 12 по управляющим сигналам 15 переключает режим работы ЭАП 1 с излучения зондирующих УЗ-сигналов от формирователя 13 на прием отраженных сигналов. УЗ-сигналы, принятые всеми ЭАП, поступают на приемники 14. Работой всего дефектоскопа управляет компьютер 16, который запускает процесс зондирования, принимает отраженные УЗ-сигналы, обрабатывает результаты измерений и передает результаты по каналу связи со средствами отображения 18. Датчик пути и скорости 17 обеспечивает привязкой положения ЭАП к координатам рельса и времени.
На поверхность катания рельса 3 устанавливают ЭАП 1 с диаграммой направленности ADF, направленный вертикально (АЕ) через головку 4, шейку 5 в подошву 6 рельса, Фиг. 1. Зондирующий сигнал ЭАП 1, после отражения от подошвы 6 рельса 3 образует диаграмму направленности BCFD, причем BC=2*DF. На интервале ВС устанавливают дополнительные ЭАП, в рассматриваемом случае используют два ЭАП 2-1 и 2-2, расположенные по краям диаграммы направленности отраженных сигналов. Синхронно перемещают ЭАП по поверхности рельса, зондируя УЗ-сигналами от ЭАП 1 и принимая отраженные сигналы всеми ЭАП. При этом измеряют текущее положение ЭАП и скорость их перемещения.
Если дефект расположен «удачно», т.е. хотя бы один ЭАП получил УЗ-сигнал, отраженный от дефекта, то «эхо-метод» позволяет не только обнаружить дефект, но и определить глубину его залегания (по времени распространения УЗ-сигнала), а также расположение по длине рельса и протяженность, привязываясь к координатам рельсового пути, полученным датчиком 17. Такая ситуация возникает, например, для горизонтального дефекта 11 и ЭАП 1.
Если дефект имеет другую ориентацию, то отраженных УЗ-сигналов может не быть и «эхо-метод» не применим. В этом случае в заявляемом способе предлагается использовать «зеркально-теневой метод», согласно которому в рассматриваемом случае обнаруживаются «подозрительные» участки рельса, на которых, хотя бы в двух ЭАП из-за дефекта пропадает УЗ зондирующий сигнал, отраженный от подошвы рельса. Вероятность такого события достаточно высока, благодаря использованию трех ЭАП и, соответственно, трех разнонаправленных линий прозвучивания. Например, вертикальные дефекты плохо обнаруживаются ЭАП 1, поскольку дефект и линия зондирования параллельны. Наклонные ЭАП 2-1 и 2-2 имеют большую вероятность выявить подозрительный участок. Более того, выявление подозрительного участка рельса хотя бы двумя ЭАП позволяет подтвердить наличие дефекта на «подозрительном» участке рельсового пути, а также рассчитать положение дефекта.
Последнее обстоятельство рассмотрим подробнее. Очевидно, что в случае расположения дефекта 8 в головке рельса 3, то расстояние между точками обнаружения подозрительных участков рельса ЭАП 2-1 и 2-2 практически равно ВС - расстоянию между ними. Если дефект 9 находится в средине рельса, то расстояние между точками обнаружения (по линиям FC и DB) составит половину ВС. Наконец, если дефект 10 находится в подошве рельса, то дефектный участок рельса будет обнаружен всеми ЭАП почти одновременно. Приведенные качественные рассуждения доказывают, что обнаружение дефектов несколькими ЭАП теневым способом позволяют рассчитать положение дефекта в рельсе.
Математические соотношения, необходимые для решения указанной задачи, очевидны и в материалах заявки не приводятся.
Таким образом, заявляемый способ может быть реализован. Позволяет с большей достоверностью обнаруживать дефекты в рельсе, а также определять положение дефекта в рельсе зеркально-теневым методом, что было невозможно раньше.
Источники информации
1. Марков А.А., Шпагин Д.А. Ультразвуковая дефектоскопия рельсов. СПб.: «Образование - Культура». 2008. - 281 с.
2. Щербинский В.Г., Алешин Н.П. Ультразвуковой контроль сварных соединений. М.: Стройиздат, 1989. 320 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ультразвукового контроля подошвы рельсов | 2016 |
|
RU2645818C1 |
| СПОСОБ ОЦЕНКИ ДЕФЕКТА В ГОЛОВКЕ РЕЛЬСА | 2011 |
|
RU2466386C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СВАРНОГО СТЫКА РЕЛЬСОВ | 2006 |
|
RU2308029C1 |
| СПОСОБ ОЦЕНКИ ДЕФЕКТА В ГОЛОВКЕ РЕЛЬСА | 2007 |
|
RU2340495C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ЭКВИДИСТАНТНЫМИ ПОВЕРХНОСТЯМИ | 2020 |
|
RU2725705C1 |
| Способ ультразвукового контроля локальных участков железнодорожных рельсов | 2023 |
|
RU2818035C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ГОЛОВКИ РЕЛЬСА | 2006 |
|
RU2308027C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ ПРОДОЛЬНЫХ ТРЕЩИН В ГОЛОВКЕ РЕЛЬСА | 2019 |
|
RU2712975C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА РАБОЧЕЙ ВЫКРУЖКЕ ГОЛОВКИ РЕЛЬСА | 2015 |
|
RU2613574C1 |

Использование: для ультразвукового (УЗ) неразрушающего контроля изделий, в частности железнодорожных рельсов. Сущность изобретения заключается в том, что в зоне досягаемости диаграммы направленности вертикального зондирующего электроакустического преобразователя (ЭАП), направленного через головку, шейку к подошве рельса, устанавливают дополнительные приемные ЭАП. Зеркально-теневым способом обнаруживают подозрительные участки рельса всеми ЭАП, а путем совместного анализа результатов всех ЭАП определяют глубину залегания дефектов. Технический результат: повышение достоверности обнаружения и определения положения дефектов в рельсе с использованием технологичного, малогабаритного искателя многоканального УЗ-дефектоскопа. 2 ил. 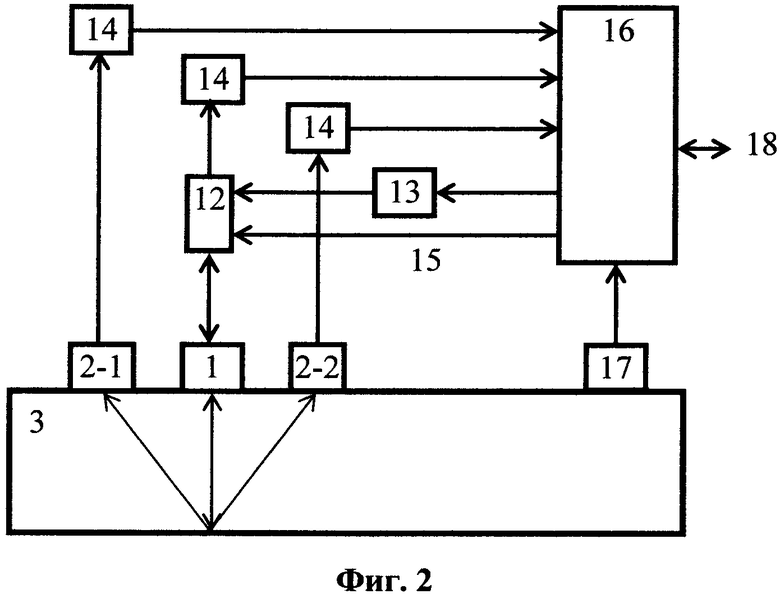
Способ обнаружения дефектов в рельсах, заключающийся в том, что устанавливают первый электроакустический преобразователь, направленный по плоскости симметрии рельса перпендикулярно поверхности его катания, перемещаясь вдоль рельса, первым электроакустическим преобразователем излучают зондирующие и принимают отраженные ультразвуковые сигналы, выявляют подозрительные участки рельса - по отсутствию на них отраженного сигнала, и дефектные участки - на которых отраженный сигнал поступил раньше, чем ожидаемый сигнал от подошвы рельса, на дефектных участках вычисляют положение дефекта в рельсе, отличающийся тем, что на поверхности катания рельса, в пределах зоны досягаемости зондирующих ультразвуковых сигналов первого электроакустического преобразователя, отраженных от подошвы рельса, устанавливают дополнительные электроакустические преобразователи, направленные по плоскости симметрии рельса, каждым дополнительным электроакустическим преобразователем принимают отраженные ультразвуковые сигналы и выявляют подозрительные участки рельса - по отсутствию на них отраженного сигнала, и дефектные участки - на которых отраженный сигнал поступил раньше, чем ожидаемый сигнал от подошвы рельса, на дефектных участках вычисляют положение дефекта в рельсе, совместно с учетом относительного положения электроакустических преобразователей и скорости их перемещения анализируют подозрительные участки рельса, обнаруженные всеми электроакустическими преобразователями, обнаруживают и определяют положение дефектов в рельсе.
| СПОСОБ ОЦЕНКИ КОРРОЗИОННОГО ПОВРЕЖДЕНИЯ ПОДОШВЫ РЕЛЬСА | 2010 |
|
RU2441789C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПОДОШВЫ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 1993 |
|
RU2085936C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПОДОШВЫ РЕЛЬСА | 2007 |
|
RU2353924C1 |
| СПОСОБ СПЛОШНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПОДОШВЫ РЕЛЬСОВ | 2010 |
|
RU2433397C1 |
| JP 2006220570 A, 24.08.2006 | |||
| US 4593569 A, 10.06.1986. | |||

