Изобретение относится к акустическому виду неразрушающего контроля и может быть использовано при контроле локальных участков железнодорожных (ж.д.) рельсов по показаниям скоростных и съемных средств дефектоскопии.
Несмотря на развитее автоматизированного контроля рельсов с помощью вагонов-дефектоскопов, диагностических комплексов и автомобилей на комбинированном ходу (скоростных дефектоскопических средств - СДС) с большой производительностью, на железных дорогах все еще востребованы ультразвуковые (УЗ) приборы локального контроля. Обнаруженные в процессе сплошного скоростного сканирования дефектные сечения рельсов требуют уточнения с помощью переносных УЗ дефектоскопов для выявления степени опасности дефекта и принятия соответствующих мер [1]. По действующей технологии для этого используют одноканальные УЗ дефектоскопы с подключенным к нему ручным электроакустическим преобразователем (ЭАП). Путем перемещения ЭАП по поверхностям рельса, дефектное сечение сканируют с разных сторон, определяют наличие дефекта, уточняют его параметры и координаты по сечению рельса. При этом требуется последовательное сканирование сечения ручными ЭАП с разными углами ввода УЗ колебаний [1].
Из-за шероховатой (необработанной или прокатной) поверхности не все поверхности рельса (например, поверхности перьев подошвы) пригодны для сканирования ручным преобразователем. Процесс вторичного контроля может занимать значительное (до 30 мин) время, что не всегда возможно и допустимо. Например, на ж.д. линии Москва - Санкт-Петербург временной интервал между поездами иногда составляет всего 15 мин, а значит, возможное время на уточняющий контроль не должно превышать 5 мин.
Для ускорения процесса УЗ контроля локальных участков рельсов предложены разные способы и устройства. Например, известные способы и устройства УЗ контроля рельсов [2-7] предусматривают использование скользящей (Sliding probe unit (SL) по поверхности катания и боковым поверхностям головки рельса группы (линейки) ЭАП, осуществляющей ввод и прием УЗ колебаний в контролируемое сечение под разными углами. Недостатком известных способов является низкая достоверность контроля и ограниченная область применения, связанная с тем, что устройства предназначены только для поиска (уточнения) дефектов в головке рельсов. С помощью традиционных систем скольжения SL сложно обеспечить акустический контакт на неровных и поврежденных поверхностях, что характерно для зон (участков рельсов) образования внутренних дефектов рельсов.
Недостатки систем скольжения частично компенсируются во втором типе системы ввода и приема УЗ колебаний, которая обозначается как «система колесного типа», «система качения», «роликовые поисковые блоки» (Roller search unit - RSU) или «колесные искательные системы» (КИС) [8]. В КИС излучатели-приемники УЗ колебаний позиционируются внутри колесообразного контейнера, наполненного контактной жидкостью и катящегося по рельсам, причем колесо имеет упругую оболочку, которая способна адаптироваться к неровностям на поверхности рельсов [9]. В колесных системах сопротивление трения заменяется сопротивлением качения, что обеспечивает долговечность конструкции и защиту основных элементов искательных узлов - УЗ преобразователей (преимущественно, ЭАП на основе пьезоэффекта). Причем, более стабильный контакт по сравнению с системой скольжения SL, удается обеспечивать с существенно (на 30%) меньшим расходом контактирующей жидкости, подаваемой к зоне контакта упругой оболочки с поверхностью рельса [10, 11].
Известны способы и устройства [12-14], реализуемые с помощью одного или двух КИС и обеспечивающие ввод и прием УЗ колебаний через поверхность катания контролируемого рельса. Известные способы обладают ограниченной областью применения и недостаточной достоверностью контроля (не предусмотрен контроль перьев подошвы, контроль головки и шейки рельса с боковых поверхностей).
Известны способы УЗ контроля ж.д. рельсов по всему сечению с помощью КИС, размещаемых на нескольких поверхностях (поверхности катания и боковых поверхностях головки, шейки и подошвы) контролируемого рельса [15-16]. Однако они имеют громоздкую конструкцию, в основном предназначены для контроля рельсов в стационарных условиях при их производстве и сварке и не могут быть применены для оперативного контроля локальных участков рельсов, уложенных в путь.
Известен УЗ способ контроля локальных участков рельса [17], заключающийся в том, что в окрестности предполагаемого дефекта на нижние грани и на поверхность катания головки рельса устанавливают сонаправленные наклонные ЭАП в виде линеек пьезопластин, размещенных поперек головки рельса в роликовых преобразователях с упругой оболочкой, синхронно перемещают их по указанным поверхностям, зондируют головку рельса, и теневым методом УЗ контроля оценивают границы внутренних дефектов рельсов. Недостатком известного способа является ограниченная область применения, вызванная пригодностью способа только для оценки дефектов головки рельсов. Причем использование нескольких КИС, жестко связанных между собой для реализации сонаправленности ЭАП, увеличивает габариты устройства.
Известен способ ультразвукового контроля локальных участков ж.д. рельсов [18], заключающийся в том, что в окрестности предполагаемого дефектного сечения на поверхности головки рельса устанавливают КИС с упругой оболочкой, содержащие набор ЭАП, углы ввода и количество которых выбирают, исходя из требуемой разрешающей способности и полноты озвучивания контролируемого сечения, синхронно перемещают КИС по сканируемым поверхностям рельса, периодически зондируют дефектное сечение принимают пришедшие через контролируемое сечение рельса УЗ сигналы (теневой метод контроля), и принимают решение о наличии дефекта в головке рельса. Недостатком известного способа, принятого за прототип, является ограниченная область применения, сложность реализации, низкая достоверность и производительность контроля.
Известен способ ультразвукового контроля концевых участков рельсов [19] в процессе их производства. Способ заключается в том, что для озвучивания концевых участков рельсов перед отправкой заказчику сечение ж.д. рельса делят на зоны, для каждой зоны на соответствующие поверхности рельса устанавливают колесные искательные системы (КИС), по появлению эхо-сигналов во временной зоне между сигналами от поверхности сканирования и противоположной стенки рельса судят о наличии внутреннего дефекта в рельсе. Способ реализуется с помощью стационарной установки, содержащей датчик перемещения по длине рельса, шесть КИС разного диаметра, одновременно устанавливаемых на поверхность катания, на поверхности шейки и перьев подошвы рельса. Недостатком известного способа [19] является ограниченная область применения (возможность применения только в заводских условиях при изготовлении рельсов), сложность реализации (несколько дефектоскопов и механизмы прижатия и отвода шести КИС к поверхностям рельса), низкая достоверность и производительность контроля, невозможность реализации способа при контроле локальных участков эксплуатируемых (уложенных в путь) рельсов по показаниям СДС.
Задачей, на решение которой направлено заявляемое изобретение, является создание способа УЗ контроля локальных участков эксплуатируемых рельсов с возможностью выявления дефектов по всему сечению с помощью одной КИС с одновременным повышением достоверности и производительности контроля.
Решение поставленной задачи обеспечивается тем, что в способе УЗ контроля локальных участков ж.д. рельсов, в окрестности предполагаемого дефектного сечения на рельс устанавливают датчик перемещения и соединенную с ним колесную искательную систему с упругой оболочкой, наполненную иммерсионной жидкостью и содержащую набор электроакустических преобразователей; колесную искательную систему перемещают по поверхности рельса, периодически зондируют дефектное сечение, принимают отраженные от дефекта ультразвуковые сигналы, причем на дефектное сечение устанавливают маркер, колесную искательную систему снабжают датчиком фиксации маркера, размеры колесной искательной системы выбирают из возможности сканирования одной искательной системой поверхностей головки, шейки и перьев подошвы рельса; поиск дефекта производят путем последовательного сканирования рельса колесной искательной системой с двух и более поверхностей, регистрируют ультразвуковые сигналы от дефекта и от маркера, с учетом сигналов от маркера и датчика перемещения синхронизируют и совместно анализируют все сигналы от дефектного сечения, принятые с разных поверхностей сканирования, и определяют параметры дефекта.
Существенными отличиями заявляемого способа по сравнению с прототипом являются:
1. Установка маркера на дефектное сечение и снабжение КИС датчиком фиксации маркера позволяет повысить точность синхронизации дефектограмм, полученных при сканировании дефектного сечения с разных поверхностей (головки, шейки, подошвы) рельса, и более корректно и точно оценивать параметры обнаруженного дефекта. В прототипе, для контроля с разных поверхностей используются разные КИС (до 6 шт.), что значительно усложняет реализацию способа.
2. Для контроля всего сечения рельса используют лишь одну КИС, последовательно перемещаемую по разным поверхностям рельса в окрестности предполагаемого дефектного сечения. Это позволяет минимизировать вес и габариты переносного комплекта дефектоскописта (оператора), практически не снижая производительности контроля и достоверности оценки дефектного сечения. Способ, реализованный в прототипе, может быть реализован только при использовании установки, содержащий не менее шесть КИС разных размеров, что делает невозможным применение его в полевых условиях при контроле локальных участков эксплуатируемых рельсов.
3. Большинство названных поверхностей рельса из-за своей шероховатости не могут обеспечивать качественный акустический контакт при сканировании их типовыми преобразователями, основанными на скольжении. Поэтому использование КИС, основанной на качении, здесь оправдано. Выбор размера КИС осуществляют, исходя из возможности сканирования доступных поверхностей головки, шейки и перьев подошвы контролируемого рельса. Традиционно применяемые для контроля рельсов КИС (RSU) диаметром 6 или 8 дюймов [9, 12-14], не позволяют реализовать предлагаемый способ. Вопросы выбора размеров КИС с учетом геометрических размеров контролируемых рельсов, в прототипе не рассматриваются.
4. Поиск дефекта производят с помощью одного КИС с двух и более поверхностей контролируемого рельса. Для уточнения параметров трудновыявляемых дефектов часто требуется ввод УЗ колебания не только с поверхности катания, как это делается в известных способах [9-14], но и с других возможных для сканирования поверхностей. Озвучивание дефектного сечения с разных поверхностей (в том числе, с боковых поверхностей шейки, с перьев подошвы) позволяет получать более полную информацию о дефекте по всему сечению рельса, что повышает достоверность контроля. В прототипе для реализации способа используют шесть КИС разных размеров, что во многих случаях может быть избыточным. Скоростные дефектоскопные средства (СДС) в процессе сплошного сканирования рельсового пути, как правило, дают информацию не только о путевой координате предполагаемого дефекта, но и указывают расположение дефекта (в головке, в шейке или в подошве рельса). При этом использование шести КИС прототипа не требуется. Например, при расположении предполагаемого дефекта в головке рельса (до 70% случаев), возможно получение всей информации о дефекте при сканировании с двух - трех поверхностей (поверхности катания и с одной или с обеих боковых поверхностей головки рельса), что повышает производительность контроля локального участка рельса без снижения достоверности.
5. Регистрация дефектограмм полученных при сканировании колесной системой разных поверхностей рельса, их синхронизация и совместный анализ всех эхо-сигналов от дефекта, позволяет более обоснованно принимать решение о наличии/отсутствии дефекта в контролируемом сечении рельса. В прототипе о регистрации сигналов для совместного анализа и документирования результатов контроля не упоминается. Описывается лишь сортировка изготовленных рельсов по срабатыванию сигналов на разных пороговых уровнях, что снижает эффективность контроля способом, реализуемым прототипом.
Совокупность существенных признаков предлагаемого способа позволяет получить технический результат: повышение достоверности контроля локальных участков ж.д. рельсов с одновременным повышением производительности контроля и снижением массы сканера (переносного комплекта дефектоскописта).
Заявляемый способ иллюстрируется следующими графическими материалами:
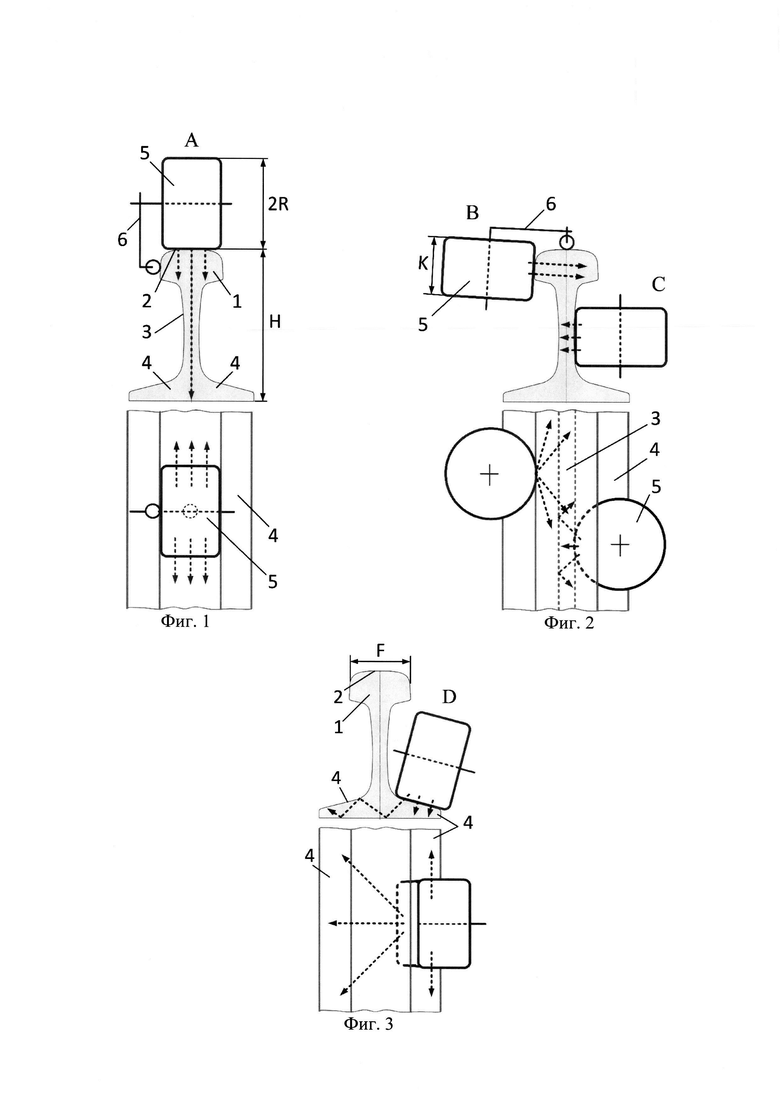
Фиг. 1. Сканирование рельса с поверхности катания (вариант А, показано положение КИС на рельсе в двух проекциях), где:
1 - головка рельса с поверхностью катания 2;
3 - шейка рельса;
4 - перья подошвы;
5 - колесная искательная система;
6 - узел фиксации КИС на сканируемой поверхности.
Фиг. 2. Сканирование с боковой поверхности головки рельса (КИС в положении В) и с поверхности шейки (положение С);
Фиг. 3. Поиск дефектов в перьях подошвы (положение D).
Фиг. 4. Пример размещения маркера на поверхности рельса, где:
7 - маркер;
8 - дефектное сечение рельса;
9 - дефект в шейке рельса;
10 - датчик перемещения КИС;
11 - датчик фиксации маркера.
Фиг. 5. Пример синхронизации дефектограмм, полученных с разных поверхностей сканирования рельса, где:
12 - сигналы при озвучивании шейки рельса с поверхности катания «наезжающим» и «отъезжающим» наклонными ЭАП (например, под углами ±42°) с соответствующими эхо-сигналами 13 и 14 от дефекта 9;
15 - сигналы от ЭАП, осуществляющих ввод УЗ колебаний нормально к поверхности катания с линией 16 донного сигнала от подошвы рельса и эхо-сигналом 17 от дефекта 9;
18 - сигналы при озвучивании дефекта 9 с поверхности шейки рельса (см. положение С на фиг. 2) с соответствующими эхо-сигналами 19 и 20 от дефекта 9;
21 - сигналы от маркера 7, отображаемые в данном примере на разделительных линиях дефектограмм одноименных УЗ каналов.
Как показано выше, для уточняющего контроля, целесообразен ввод УЗ колебания не только с поверхности катания, но и с других, возможных для сканирования, поверхностей рельса. В соответствии с заявляемым способом, в процессе контроля дефектного сечения КИС может быть установлен на любую из указанных на фиг. 1-3 поверхностей рельса.
Основные геометрические параметры КИС, диаметр 2R и ширина K, непосредственно влияют на возможность качественной реализации заявляемого способа. С одной стороны, ширина КИС должна обеспечивать возможность размещения внутри достаточного количества ЭАП, позволяющих в процессе однократного сканирования охватить все контролируемое сечение. С другой стороны - необходимость сканирования боковых поверхностей головки и шейки рельса, верхних поверхностей перьев подошвы, ограничивает максимально возможные размеры колеса с упругой оболочкой. В общем случае целесообразно ориентироваться на величину ширины F головки рельса

При этом отдельные ЭАП при контроле с боковых поверхностей головки и с перьев подошвы, не участвующие в озвучивании контролируемого сечения, могут быть отключены программно-аппаратным способом.
Диаметр 2R колеса должен выбираться, исходя из следующих условий:
- при поиске дефектов в перьях подошвы габаритные размеры колеса не должны задевать нижнюю грань головки рельса;
- ЭАП, размещенные внутри колеса, обуславливают достаточно большое время пробега УЗ колебаний до контактной поверхности рельса. Поэтому ожидаемое время появления эхо-сигналов от внутренних дефектов смещается относительно зондирующего импульса на величину распространения УЗ колебаний в иммерсионной жидкости и в толще упругой полиуретановой оболочки КИС. Критичным здесь является озвучивание рельса по всей высоте Н прямым ЭАП с углом ввода УЗ колебаний 0° (фиг. 1). С целью исключения неоднозначности выделения донного сигнала (от подошвы рельса), радиус колеса R должен удовлетворять условию, полученному из геометрических соображений:

где H - высота рельса (180 мм для рельса типа Р65);
cg - скорость распространения УЗ колебаний в иммерсионной жидкости в колесе (около 1,5 мм/мкс, зависит от состава жидкости);
cl - скорость продольной УЗ волны в металле рельса (5,9 мм/мкс);
hh и hb - высота головки (head) и подошвы (bottom) рельса.
Для экспериментальных исследований предлагаемого способа по полученному выражению и для размеров рельса типа Р65, параметры КИС выбраны: диаметр 2R=110 мм, ширина K=60 мм (фиг. 6). В общем случае реализация способа может быть осуществлена и при использовании КИС с другими размерами.
Реализуемость и эффективность предлагаемого способа УЗ контроля локальных участков ж.д. рельсов рассмотрим на примере уточнения наличия поперечной трещины в головке рельса. Путейскую координату дефектного сечения и возможную зону залегания дефекта определяют после проезда СДС (например, вагона-дефектоскопа) в режиме сплошного контроля перегона. Оператор ручного (уточняющего) контроля выходит в путь на эту координату. В окрестности предполагаемого дефекта на поверхность катания рельса устанавливают КИС со встроенными ЭАП, осуществляющими ввод УЗ колебаний в рельс под типовым углом ввода 70° (положение А на фиг. 1). При этом размеры КИС, удовлетворяющих условиям (1) и (2), позволяют разместить по три пары типовых пьезопластин по ширине КИС, ориентированные по длине рельсов в противоположных направлениях (фиг. 1), позволяющим практически охватить большую часть сечения головки рельса. По мере качения КИС по поверхности катания, дефектное сечение головки рельса озвучивается с одной и другой стороны (по длине рельса), и при наличии дефекта, как минимум один или более вышеназванных ЭАП фиксируют эхо-сигналы от него.
При фиксации сигналов незначительной амплитуды от искомого дефекта, для дополнительного уточнения параметров дефекта, КИС устанавливают на одну из боковых поверхностей головки рельса и повторяют сканирование (прокатывают КИС) вдоль рельса в окрестности дефектного сечения (на фиг. 2 КИС находится в положении В на боковой поверхности головки рельса). Такое сканирование особенно желательно, если поверхность катания рельса повреждена микротрещинами, отслоениями и выкрашиваниями металла (дефекты первой группы по [20]), затрудняющими ввод УЗ колебаний с поверхности катания. В наиболее сложных ситуациях, вызванных нетипичной ориентацией трещины или значительным износом боковой поверхности головки рельса, аналогичное сканирование производится и с другой боковой поверхности катания рельса.
Таким образом, сечение головки рельса в окрестности предполагаемого дефекта озвучивается наиболее тщательным образом с трех поверхностей головки и с двух сторон (относительно продольной оси рельса) дефектного сечения. При наличии дефекта будут зафиксированы все возможные эхо-сигналы, совместный анализ которых позволяет однозначно и достоверно оценить обнаруженный дефект.
При средней скорости перемещения (качения КИС) около 100 мм/с и протяженности окрестности дефектного сечения 500 мм, суммарное время сканирования по трем поверхностям не превышает 15 с. Полученные эхо-сигналы позволяют достоверно оценить степень опасности выявленного дефекта непосредственно на месте контроля, а также в процессе отложенного анализа при регистрации сигналов в виде дефектограмм.
Дефекты в шейке и в центральной части подошвы (в проекции шейки) могут быть обнаружены с помощью ЭАП, осуществляющих ввод УЗ колебаний с поверхности катания под углом α=0° (нормальный ввод продольных УЗ колебаний) и разнонаправленными наклонными ЭАП, например, под углом α=±42°. При необходимости уточнения параметров дефекта в шейке рельса, КИС может устанавливаться на шейку рельса (положение С на фиг. 2).
Аналогичным образом могут быть просканированы и перья подошвы (фиг. 3, положение D - КИС на поверхности пера подошвы), обычно недоступные для УЗ контроля известными способами. При озвучивании сечений перьев подошвы (rail foot area) в процессе сканирования с поверхности перьев могут использоваться ЭАП с углами ввода УЗ колебаний 70°, применяемые при контроле головки рельса. В общем случае возможно использование и других ЭАП под иными углами ввода и разворота УЗ колебаний относительно направления сканирования. Например, один из ЭАП может быть направлен в противоположную сторону сканируемого пера для обнаружения трудновыявляемых трещин (фиг. 3).
При ручном сканировании дефектного сечения зона перемещения КИС в окрестности предполагаемого дефекта невелика и, как правило, не превышает 500-600 мм (по 250-300 мм с обеих сторон дефектного сечения). Решение о наличии дефекта в исследуемом сечении можно принять непосредственно на месте по анализу сигналов на экране многоканального дефектоскопа, оснащенного опцией фиксации (заморозки) экранов с эхо-сигналами, с возможностью последующего просмотра их в процессе сканирования с нескольких поверхностей рельса. Несмотря на то, что при этом скорости сканирования (перемещения КИС) примерно одинаковы и определяются навыками оператора, все же точностные характеристики измеряемых параметров искомого дефекта могут быть невысокими.
Для документирования результатов контроля и повышения точностных характеристик измеряемых параметров (глубина залегания, протяженность и т.п.) дефекта, в соответствии с заявляемым способом, КИС снабжают датчиком перемещения 10 (например, одометром), регистрацию сигналов контроля осуществлять в виде традиционной развертки типа В (представление сигналов на координатной плоскости «время t распространения УЗ колебаний - путь l перемещения КИС» [8, 21]) (см. фиг. 4 и 5).
Для точной синхронизации дефектограмм, полученных с разных поверхностей сканирования рельса, на дефектном сечении, координаты которого получены, в частности, по показаниям СДС сплошного контроля рельсов, в соответствии с заявляемым способом, устанавливают маркер 7, положение которого также фиксируется датчиком 11 (фиг. 4), установленном на КИС и соединенным с электронным блоком дефектоскопа (на фиг. не показан).
В качестве примера на фиг. 4 показан процесс УЗ контроля локального участка рельсового пути с дефектом 9 в шейке рельса и формирование сигналов (фиг. 5) при сканировании с двух поверхностей: с поверхности катания 2 и с поверхности шейки 3 рельса.
Для синхронизации сигналов в процессе сканирования дефекта 9 с двух поверхностей, устанавливают маркер 7 на координате, полученной ранее с СДС во время сплошного сканирования (фиг. 4). В процессе качения (сканирования) КИС, снабженного датчиком перемещения 10 и датчиком фиксации маркера 11, вдоль рельса по той или иной поверхности, одновременно с регистрацией УЗ сигналов от дефекта, с помощью датчика 11 фиксируется и местоположение маркера. Наличие отметки от маркера на дефектограмме позволяет корректно синхронизировать сигналы от дефекта, полученные в процессе озвучивания его с разных поверхностей рельса. При этом протяженности дефектограмм, полученных с разных поверхностей сканирования могут и отличаться друг от друга (с поверхности катания длиннее, с поверхности шейки короче). Однако это не мешает возможность и точность синхронизации дефектограмм, достаточно лишь совместить их по меткам 21 (фиг. 5) маркера 7 (см. фиг. 4).
В приведенном примере локальный дефект 9, залегающий в нижней части шейки рельса, в общем случае может формировать 5 групп (пачек) эхо-сигналов в зонах регистрации 12, 15 и 18 (фиг. 5), и зону прерывания линии донного сигнала 16 в процессе озвучивания его всего с двух поверхностей: с поверхности катания 2 и с одной из поверхностей шейки 3 контролируемого рельса 1 (фиг. 4).
При сканировании с поверхности катания 2 рельса и озвучивании дефекта 9 двумя наклонными ЭАП (например, с углом ввода УЗ колебаний α=±42°), размещенными в КИС 5, формируются пачки эхо-сигналов 13 и 14, а при озвучивании с ЭАП α=0°, пачка эхо-сигналов 17 и прерывание донного сигнала 16. При сканировании с поверхности шейки 3 рельса возможен прием эхо-сигналов 19 и 20, полученных рассмотренными выше ЭАП в КИС 5.
Корректную синхронизацию сигналов, зарегистрированных на дефектограммах 12, 15 и 18, удается осуществить благодаря меткам 21, полученным датчиком 11 от маркера 7 (фиг. 4). Определение координат в сечении рельса 1 и параметры обнаруженного дефекта 9 осуществляют известными способами [8, 21 и 22] по временным и пространственным положениям пачек сигналов относительно поверхностей ввода УЗ колебаний. Для дополнительного повышения достоверности оценки дефектного сечения целесообразно воспользоваться оценкой интегрального параметра дефектного сечения [23, 24]. Отметим, также, что известные технические решения по синхронизации дефектограмм с целью приведения сигналов к единому сечению, принятые при сплошном УЗ контроле рельса здесь также не пригодны. Например, известный способ [28] предназначен для приведения сигналов в «единое сечение» при многоканальном контроле и вводе УЗ колебаний только с поверхности катания с искательной системой скольжения с жестко фиксированными расстояниями между единичными ЭАП и не может быть использована при сканировании с разных поверхностей рельса.
В качестве маркера могут использоваться любые известные конструкции, например, в виде предварительно намагниченного композиционного материала с высокими пластическими функциями [25, 26]. При этом в качестве датчика 11 фиксации маркера 7 используется магниточувствительный датчик, например, датчик Холла [27], соединенный с электронным блоком дефектоскопа.
Экспериментальная проверка способа выполнена с помощью многоканального дефектоскопа АВИКОН-20 и КИС диаметром 110 мм производства АО «Радиоавионика» при контроле рельсов с моделями и реальными дефектами. Сканирование с нескольких поверхностей рельса, синхронизация дефектограмм, совместный анализ всех эхо-сигналов, полученных от искомого отражателя, позволят получить более достоверный результат, чем при сканировании с одной поверхности рельса и более точно оценить измеряемые параметры: глубину залегания и условные размеры дефекта.
Специалисту в данной области техники понятно, что настоящее изобретение не ограничено приведенными примерными вариантами осуществления, описанными выше, и что в рамках настоящего изобретения возможны и другие числовые значения, и параметры реализаций, которые определены прилагаемой формулой.
Таким образом, предлагаемый способ может быть реализован, позволяет повысить надежность и достоверность обнаружения внутренних дефектов рельсов, увеличивает производительность контроля и имеет небольшую массу, что важно при ручном уточняющем контроле локальных участков эксплуатируемого рельсового пути по показаниям скоростных средств дефектоскопии.
Источники информации
1. Положение о системе неразрушающего контроля рельсов и эксплуатации средств рельсовой дефектоскопии в путевом хозяйстве железных дорог ОАО «РЖД». №1471/р от 26.07.2017 (Прил. 8, с. 76-90).
2. JP 2007132758.
3. JP 2016045204.
4. JP 2015243094.
5. RU 2340495.
6. RU 2466386.
7. RU 216030.
8. Марков A.A., Кузнецова E.A. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 1. Основы. С-Пб.: КультИнформПресс, 2010. 290 с. (см. стр. 175-180).
9. US 6604421.
10. RU 89235.
11. RU 2 677124.
12. CN 218726915.
13. CN 219016196.
14. US 4174636.
15. RU 139458.
16. CN 110412137.
17. RU 2783753.
18. RU 2785302.
19. US 4487071.
20. Инструкция "Дефекты рельсов. Классификация, каталог и параметры дефектных и остродефектных рельсов". ОАО "РЖД" №2499р от 23.10.2014
21. Марков А.А. Шпагин Д.А. Регистрация и анализ сигналов ультразвукового контроля рельсов. СПб.: Образование - Культура. 2003. 148 с.
22. RU 2441789.
23. RU 2699942.
24. RU 2748869.
25. RU 2570297.
26. RU 2511787.
27. RU 2696066.
28. RU 2446971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового контроля локальных участков рельсов | 2023 |
|
RU2813672C1 |
| Способ ультразвукового контроля локальных участков рельсов | 2023 |
|
RU2823665C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2023 |
|
RU2809185C1 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |
| Способ ультразвукового контроля подошвы рельсов | 2016 |
|
RU2645818C1 |
| Способ оценки работоспособности искательной системы дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2758403C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| Способ ультразвукового контроля зоны болтовых стыков рельсов | 2022 |
|
RU2791145C1 |
| Способ зеркально-теневого ультразвукового контроля с адаптивным пороговым уровнем | 2022 |
|
RU2787948C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии длинномерных объектов | 2021 |
|
RU2756933C1 |

Использование: для контроля локальных участков железнодорожных рельсов. Сущность изобретения заключается в том, что в окрестности предполагаемого дефектного сечения на рельс устанавливают колесную искательную систему с упругой оболочкой, наполненную иммерсионной жидкостью и содержащую набор электроакустических преобразователей, углы ввода и количество которых выбирают, исходя из требуемой разрешающей способности и полноты озвучивания контролируемого сечения, перемещают колесную искательную систему по поверхности рельса, периодически зондируют дефектное сечение, принимают отраженные от дефекта ультразвуковые сигналы, причем размеры колесной искательной системы выбирают из возможности сканирования доступных поверхностей головки, шейки и пера подошвы рельса, поиск дефекта производят путем последовательного сканирования рельса с двух и более поверхностей. Дополнительно на дефектное сечение устанавливают маркер, колесную искательную систему снабжают датчиком перемещения и датчиком фиксации маркера, регистрируют ультразвуковые сигналы от дефекта и от маркера, с учетом сигналов от маркера синхронизируют все эхо-сигналы, принятые с разных поверхностей сканирования рельса, совместно анализируют их и определяют параметры дефекта. Технический результат: повышение достоверности и производительности контроля локальных участков рельсов с одновременным снижением массы сканера. 5 ил.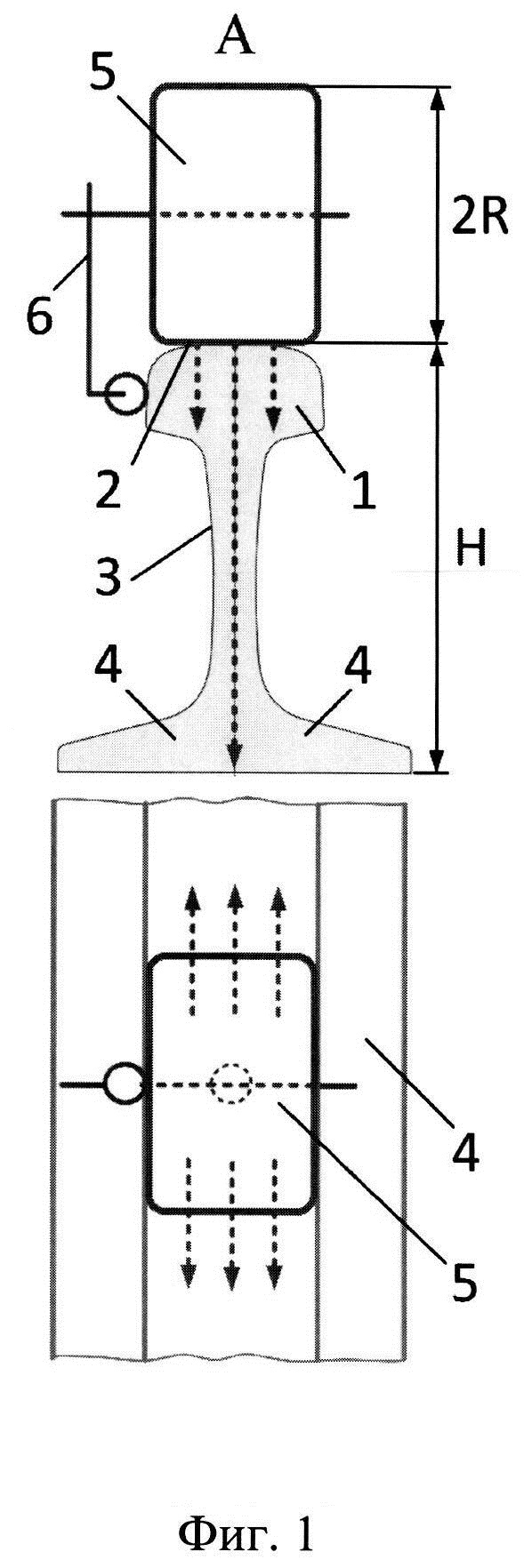
Способ ультразвукового контроля локальных участков железнодорожных рельсов, заключающийся в том, что в окрестности предполагаемого дефектного сечения на рельс устанавливают датчик перемещения и колесную искательную систему с упругой оболочкой, наполненную иммерсионной жидкостью и содержащую набор электроакустических преобразователей, перемещают колесную искательную систему по поверхности рельса, периодически зондируют дефектное сечение, принимают отраженные от дефекта ультразвуковые сигналы, отличающийся тем, что на дефектное сечение устанавливают маркер, колесную искательную систему снабжают датчиком фиксации маркера, размеры колесной искательной системы выбирают из возможности сканирования одной искательной системой поверхностей головки, шейки и пера подошвы рельса, поиск дефекта производят путем последовательного сканирования рельса колесной искательной системой с двух и более поверхностей, регистрируют ультразвуковые сигналы от дефекта и от маркера, с учетом сигналов от маркера и датчика перемещения синхронизируют и совместно анализируют все сигналы от дефектного сечения, принятые с разных поверхностей сканирования, и определяют параметры дефекта.
| US 4487071 A, 11.12.1984 | |||
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2010 |
|
RU2446971C2 |
| WO 8203920 A1, 11.11.1982 | |||
| Пневматическая загрузочная воронка | 1949 |
|
SU89235A1 |
| СПОСОБ МНОГОКАНАЛЬНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2002 |
|
RU2227911C1 |

