Изобретение относится к области ультразвукового (УЗ) неразрушающего контроля изделий, в частности железнодорожных рельсов. Способ может быть использован для оценки дефекта в головке рельса, ранее обнаруженного другими средствами дефектоскопии, для принятия решения о степени его опасности и необходимости ремонта участка рельсового пути.
Традиционная процедура обеспечения исправного состояния рельсовых путей включает два этапа:
1. Скоростной неразрушающий контроль рельсового пути быстроходными дефектоскопическими средствами типа вагонов дефектоскопов или автомотрис с целью обнаружения подозрительных на дефект участков при наименьшем по времени занятии путей. Найденные подозрительные участки маркируются или сохраняются их координаты.
2. Выезд ремонтной бригады на место предполагаемого дефекта, оценка состояния рельса в месте дефекта и, при необходимости, производство ремонтных работ.
Практика ремонтных работ показывает, что значительная (до 50%) часть дефектов, обнаруженных на первом этапе, является сигналами «ложной тревоги», явившимися следствием ошибок в работе скоростных дефектоскопических средств, или обнаруженные дефекты не представляют угрозы безопасности движения.
Известны общие способы поиска дефектов в рельсах [1]. Подавляющее (до 93%) число методов, реально применяемых на практике на первом этапе, составляет эхо- и зеркальные методы ультразвукового контроля. Эти методы предполагают обнаружение дефектов путем излучения УЗ сигналов и приема сигналов, отраженных от дефектов. Широкое распространение этих методов объясняется тем, что сложная форма рельса при скоростном контроле позволяет установить электроакустические преобразователи (ЭАП) только на поверхность катания рельса.
Недостатком эхо- и зеркальных методов является сложность обнаружения и измерения параметров дефектов, связанная с тем, что различная ориентация дефектов и сложный характер отражения УЗ сигналов от их поверхности усложняют дефектоскопию.
Указанные обстоятельства приводят к необходимости повышения чувствительности скоростных дефектоскопов, что еще более увеличивает вероятность «ложной тревоги». Таким образом, данные способы малопригодны для оценки реальных размеров и ориентации дефектов в головке рельса.
Введем понятия вертикального и горизонтального дефектов. Под вертикальным дефектом будем понимать плоский с минимальным раскрытием дефект, плоскость которого перпендикулярна поверхности катания рельса. Под горизонтальным дефектом будем понимать такой же дефект, но параллельный поверхности катания рельса. Вертикальным и горизонтальным дефектам могут быть поставлены в соответствие методы их обнаружения. Реальные дефекты в головке рельса могут иметь произвольную ориентацию, форму и толщину, тогда для их обнаружения могут использоваться как методы обнаружения горизонтальных, так вертикальных дефектов.
Известны способы оценки дефекта в головке рельса [2, 3, 4], заключающейся в том, что в окрестности предполагаемого дефекта на противоположных поверхностях головки рельса устанавливают пары ЭАП, с линиями зондирования, направленными друг на друга и расположенными в одной плоскости зондирования, зондируют головку рельса, для чего излучают ультразвуковые сигналы с одной и принимают их с другой стороны головки рельса, совместно перемещают все ЭАП вдоль рельса, обнаруживают и определяют положение линии границы дефекта теневым методом, определяют размер дефекта в плоскости зондирования. В этих способах несколько ЭАП располагают с противоположных боковых сторон головки рельса, что позволяет обнаружить границы дефекта вдоль рельса - по пропаданию принятых УЗ сигналов. Положение нижней линии границы дефекта позволяет оценить глубину дефекта. Разрешающую способность по глубине определяет количество ЭАП.
Недостатками этих способов являются ограниченные возможности оценки дефектов в головке рельса, поскольку они позволяют определить только размеры вертикальных дефектов, и малопригодны для обнаружения горизонтальных дефектов в виде расслоения головки рельса.
Наиболее близким к заявляемому является способ оценки дефекта в головке рельса [5], заключающийся в том, что в окрестности предполагаемого дефекта на противоположных поверхностях головки рельса устанавливают пары взаимонаправленных ЭАП, перемещают все пары ЭАП по указанным поверхностям головки рельса, зондируют головку рельса, для чего в каждой паре излучают ультразвуковые сигналы одним и принимают другим ЭАП, обнаруживают линии границ дефекта теневым методом, совместно анализируют их и определяют размеры дефекта, пары ЭАП размещают на боковых поверхностях головки рельса, а каждую пару ЭАП снабжают второй парой ЭАП, такой, чтобы линии зондирования первой и второй пар не были параллельны. Данный способ позволяет обнаруживать вертикальные дефекты в головке рельса.
Недостатки данного, как и всех рассмотренных ранее способов, заключаются в том, что они не позволяют обнаружить и оценить горизонтальные дефекты, в виде расслоений подповерхностного слоя головки рельса (дефекты 10.2, 11.2, 17.2, 27.2, 30В.2, 30Г.2), поскольку такие дефекты оказываются параллельными линиям зондирования. Кроме того, сложность формы головки рельса существенно ограничивает возможности УЗ зондирования. Так, например, радиусные переходы от поверхности катания рельса к боковой, и от боковой к подповерхностной существенно усложняют установку ЭАП. Таким образом, часть головки рельса в способе [5] остается вне зоны дефектоскопии. Проблема горизонтальных дефектов состоит в том, что дефекты, расположенные близко от поверхности катания рельса, попадают в зону нечувствительности ЭАП, расположенного на этой поверхности. Более того, из-за износа рельса, толщина головки в вертикальной плоскости может изменяться, что еще более усложняет задачу обнаружения горизонтальных дефектов. Заметим, что существенными считаются горизонтальные дефекты, расположенные на глубине больше 8 мм от поверхности катания.
В общем случае дефекты в головке рельса могут иметь произвольные формы, размер и ориентацию. Для нахождения любого дефекта необходимо иметь поисковую систему, с линиями зондирования, образующими трехмерный ортогональный базис или систему трех линейно независимых векторов. Тогда любой дефект в головке рельса при измерении этим базисом с заданным по разрешению шагом столкнется с линией зондирования. При выборе мест установки поисковых элементов необходимо учесть возможность их установки ЭАП на головке рельса.
Задачей, решаемой заявляемым способом, является обеспечение проверки обнаруженного ранее подозрительного на дефектность участка головки рельса, с гарантированным выявлением дефектов, имеющих произвольную ориентацию, определение их размеров и положения. Нахождение указанных параметров дефекта позволяет обоснованно определить целесообразность проведения трудоемких ремонтных работ.
Для решения этой задачи в способе оценки дефекта в головке рельса, заключающемся в том, что в окрестности предполагаемого дефекта на противоположных поверхностях головки рельса устанавливают пары взаимонаправленных ЭАП, перемещают все пары ЭАП по указанным поверхностям головки рельса, зондируют головку рельса, для чего в каждой паре излучают ультразвуковые сигналы одним и принимают другим электроакустическим преобразователем, обнаруживают линии границ дефекта теневым методом, совместно анализируют их и определяют размеры и местоположение дефекта, пары ЭАП первой группы размещают на боковых поверхностях головки рельса, а каждую пару ЭАП снабжают второй парой ЭАП, такой, чтобы линии зондирования первой и второй пар не были параллельны, перемещения пар ЭАП выполняют с шагом, обеспечивающим требуемое разрешение при поиске дефекта, ЭАП второй группы пар размещают на поверхности катания и подголовочных поверхностях рельса, при этом ЭАП, размещенные на подголовочной поверхности, являются излучающими, при зондированиях второй группой измеряют время распространения УЗ сигнала и вычисляют толщину головки рельса по линии зондирования, а при обнаружении дефекта принимают сигнал, отраженный от дефекта, измеряют время его распространения, рассчитывают глубину залегания дефекта и оценивают степень его опасности.
Существенными отличиями заявляемого способа являются:
Перемещают пары ЭАП с шагом, обеспечивающим требуемое разрешение при поиске дефекта, что позволяет гарантированно обнаружить дефекты вдоль направления перемещения.
В прототипе вопрос о разрешающей способности обнаружения дефектов подразумевается, но в прямой постановке не рассматривается.
ЭАП второй группы пар размещают на поверхности катания и подголовочных поверхностях рельса, что позволяет получить линии зондирования, перпендикулярные поверхности катания рельса (или близкие к ним). Таким образом, по крайней мере, две пары первой и две пары второй групп ЭАП образуют линейно независимый базис векторов, обеспечивающих обнаружение любого дефекта.
ЭАП, размещенные на подголовочной поверхности, являются излучающими. Такой выбор объясняется тем, что горизонтальные расслоения головки рельса могут располагаться близко к поверхности катания и находиться в зоне нечувствительности ЭАП, расположенных на ней.
В прототипе пары ЭАП симметричны и вопрос о выборе излучающего ЭАП не стоит.
При зондированиях второй группой измеряют время распространения УЗ сигнала и вычисляют толщину головки рельса по линии зондирования. Такие измерения необходимы, поскольку толщина головки рельса изменяется по мере износа рельса, а нахождение горизонтального расслоения требует точного знания толщины головки рельса непосредственно в области дефекта. Такой прием позволяет обнаруживать и определять местоположение дефектов как теневым, так и зеркальным методами, в том числе и расположенных близко к поверхности катания.
В прототипе используется только теневой метод.
При обнаружении дефекта принимают сигнал, отраженный от дефекта, измеряют время его распространения и рассчитывают глубину залегания дефекта.
В прототипе определяют габаритные размеры вертикальных дефектов. Такие измерения, как правило, достаточны для определения глубины их залегания.
Заявляемый способ иллюстрируют следующие графические материалы:
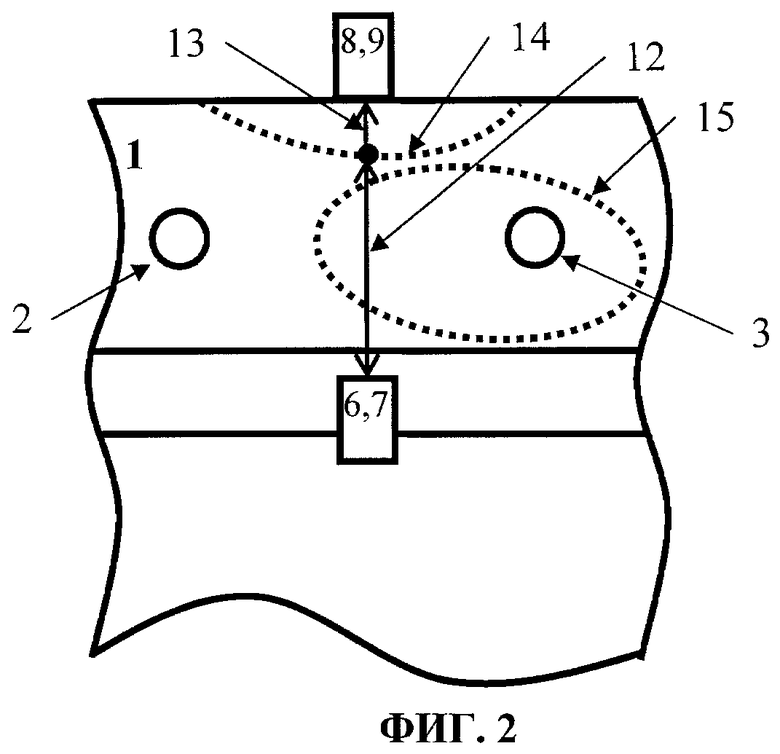
Фиг.1 - головка рельса - поперечное сечение.
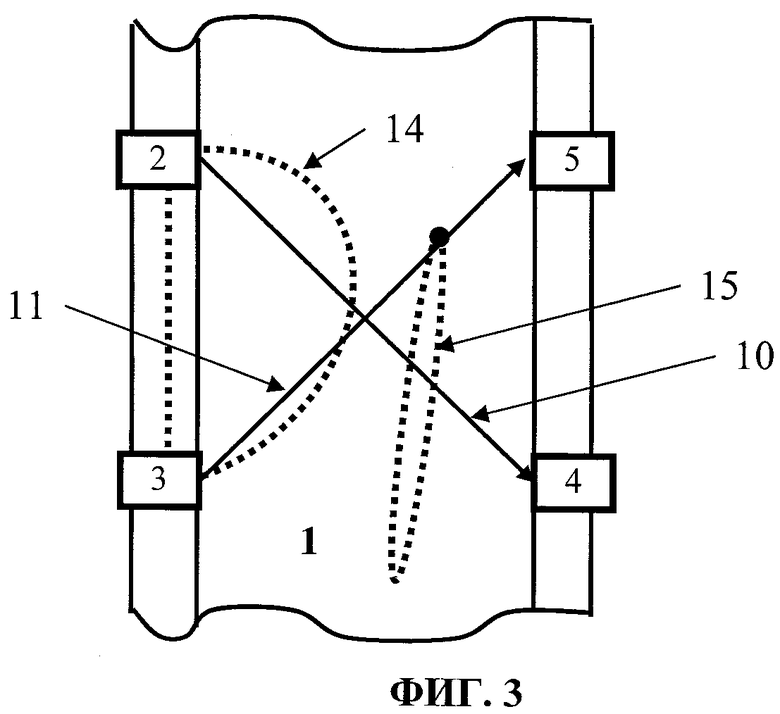
Фиг.2 - головка рельса - вид сбоку.
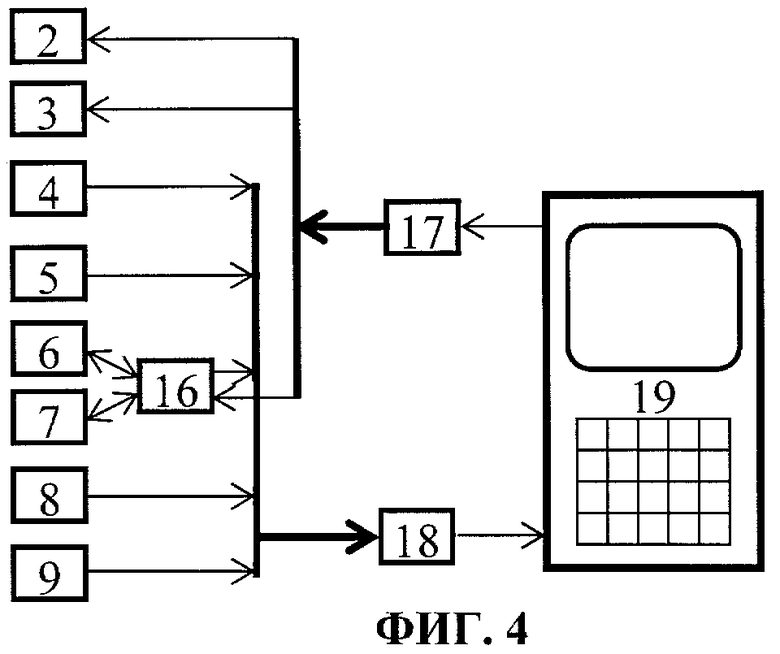
Фиг.3 - головка рельса - вид сверху,
где:
1 - Головка рельса;
2, 3 - излучающие ЭАП первой группы;
4, 5 - принимающие ЭАП первой группы;
6, 7 - излучающие ЭАП второй группы;
8, 9 - принимающие ЭАП второй группы;
10 - линия зондирования пары ЭАП 2-4;
11 - линия зондирования пары ЭАП 3-5;
12 - линия зондирования пары ЭАП 6-8;
13 - линия зондирования пары ЭАП 7-9;
14 - горизонтальный дефект головки рельса;
15 - вертикальный дефект головки рельса;
Фиг.4 - структурная схема дефектоскопа,
где:
16 - коммутатор «излучение-прием»;
17 - формирователь-коммутатор зондирующих УЗ сигналов;
18 - приемник-коммутатор УЗ сигналов;
19 - многоканальный УЗ дефектоскоп.
ЭАП 2-4, 3-5, 6-8 и 7-9 образуют взаимонаправленные пары с линиями зондирования 10, 11, 12 и 13 соответственно. Пары ЭАП 2-4 и 3-5 предназначены для обнаружения вертикальных дефектов и располагаются на боковых поверхностях головки рельса 1, а их линии зондирования 10 и 11 в рассматриваемом простейшем варианте реализации лежат в одной плоскости зондирования и пересекаются под прямым углом (не параллельны). Такое размещение ЭАП позволяет обнаружить вертикальный дефект даже в том случае, когда он параллелен одной из линий зондирования. Для достижения требуемой разрешающей способности при поиске вертикальных дефектов эти пары необходимо перемещать с требуемыми шагами как по плоскости зондирования - вдоль головки рельса 1 (по горизонтали), так и поперек головки рельса 1 (по вертикали). Другим вариантом достижения заданной разрешающей способности является установка на боковых поверхностях головки рельса нескольких подобных пар ЭАП по горизонтали и (или) по вертикали. Возможен компромиссный вариант решения - выбор оптимального количества пар ЭАП и точек зондирования.
ЭАП 6 и 7 предназначены для обнаружения горизонтальных дефектов и установлены на подголовочных поверхностях рельса 1, а 8 и 9 - на поверхности катания рельса. Направления излучения ЭАП 6 и 7 следует выбирать вертикальными, так, чтобы наиболее вероятные горизонтальные дефекты стали отражающими в направлении источника излучения. Проблема поиска горизонтальных дефектов состоит в том, что если дефект расположен близко от поверхности катания рельса, то он попадает в зону нечувствительности ЭАП, расположенного на поверхности катания рельса.
Более того, из-за износа рельса, толщина головки в вертикальной плоскости может изменяться, что еще более усложняет задачу обнаружения и оценки горизонтальных дефектов. Таким образом, для точного определения положения горизонтального дефекта в качестве излучающих выбираются подголовочные ЭАП, а при обнаружении глубины залегания дефекта используется априорно измеренная толщина головки по линиям зондирования 12 и 13. Для достижения требуемой разрешающей способности при поиске горизонтальных дефектов эти пары необходимо перемещать с требуемыми шагами как вдоль оси, так и попрек рельса. Другим вариантом достижения заданной разрешающей способности является установка нескольких подобных пар ЭАП с двух сторон головки рельса. Возможен компромиссный вариант решения - выбор оптимального количества пар ЭАП и точек зондирования. На практике можно считать, что удовлетворительного качества зондирования по ширине рельса можно добиться при установке двух-трех пар ЭАП второй группы на каждой стороне головки рельса.
Установка ЭАП на боковых и подголовочных поверхностях головки рельса сопряжена с проблемами, связанными с их негладкостью. Для обеспечения акустического контакта ЭАП с поверхностью рельса могут использоваться ультразвуководы на основе гидрогеля [6].
Рассмотрим возможность реализации заявляемого способа. По результатам скоростных измерений определяется участок рельса с предполагаемым дефектом. Выездная бригада в окрестности предполагаемого дефекта устанавливает на головку рельса измерительный блок, содержащий пары взаимонаправленных электроакустических преобразователей 2-4, 3-5, 6-8 и 7-9. Проводят зондирование головки рельса, т.е. излучают УЗ колебания 2, 3, 6 и 7 ЭАП, которые при отсутствии дефекта принимаются соответственно 4, 5, 8 и 9 ЭАП. Измеряют время распространения УЗ сигналов между ЭАП 6 и 8, 7 и 9 и вычисляют толщину головки по линиям зондирования 12 и 13. Перемещают все пары ЭАП вдоль рельса с шагами, равными минимально допустимому размеру дефекта по направлению измерений и повторяют зондирования. При обнаружении дефектов 14 или 15 используется теневой метод, т.е. производится поиск момента, когда дефект перекроет линии зондирования 10, 11, 12 или 13. Назовем такую линию зондирования - линией границы дефекта, например линию 10, для ЭАП 2 и 4 фиг.3. Сохраняют положение линии зондирования, например, в виде риски на поверхности рельса.
Для первой группы парой ЭАП при обнаружении линии границы (начала) дефекта 15 продолжают перемещение ЭАП до обнаружения второй линии границы (конца) дефекта. Аналогичные действия продолжают для всех пар ЭАП первой группы и для разных плоскостей зондирования, перемещая последнюю по вертикали и повторяя описанную выше процедуру. В результате таких измерений будут получены линии границ дефекта в разных плоскостях зондирования и с ортогональными линиями зондирования ЭАП первой группы. Эти линии позволяют оценить размер вертикального дефекта или проекцию дефекта 15 произвольной ориентации на вертикальную плоскость.
Для второй группы парой ЭАП действуют аналогичным образом, но перемещают ЭАП 6 и 7 вдоль и поперек рельса. Дополнительно после обнаружения линий границ начала дефекта 14 и до обнаружения линий границ конца дефекта принимают сигналы, отраженные от дефекта 6 и 7 излучающими ЭАП, например 12, фиг.1. Оценивают время их распространения, вычисляют расстояние от ЭАП 6 (7) до дефекта 14, сравнивают полученное значение с вычисленной ранее толщиной головки рельса и вычисляют глубину дефекта 14. Таким образом, знание размеров горизонтального дефекта 14 и глубины его залегания позволяет оценить степень его опасности.
Устройство, реализующее заявляемый способ, фиг.4, содержит:
Коммутатор 16 предназначен для переключения ЭАП 6 и 7 с излучения на прием и обеспечивает излучение УЗ сигналов при поиске дефекта и прием отраженных УЗ сигналов, отраженных от дефекта 14, при измерении глубины залегания.
Формирователь-коммутатор зондирующих УЗ сигналов 17 предназначен для одновременной или последовательной (в зависимости от выбранного метода поиска) подачи зондирующих сигналов на ЭАП 2-3-6 и 7.
Приемник-коммутатор УЗ сигналов 18 предназначен для приема УЗ сигналов от ЭАП 4, 5, 6, 7, 8 и 9.
Многоканальный УЗ дефектоскоп 19 обеспечивает формирование, прием, обработку УЗ сигналов и отображение полученных результатов и может быть реализован на микроконтроллере (однокристальном компьютере) средних вычислительных возможностей.
Все перечисленные блоки устройства, фиг.4, являются традиционными, а их работа в полной мере соответствует описанной выше процедуре реализации заявляемого способа.
Более сложный вариант устройства может содержать датчики позиционирования всех ЭАП, приводы для их перемещения и более мощные вычислительные средства для обработки и отображения результатов измерений.
Таким образом, заявляемый способ может быть реализован на практике, обеспечивает достоверную оценку размеров, положения и ориентации дефектов любой ориентации в головке рельса. На основании полученной информации может быть принято обоснованное решение о целесообразности проведения ремонта или о периодическом наблюдении за ростом дефекта (мониторингом) рельса до достижения им критических размеров.
Источники информации
1. Марков А.А., Шпагин Д.А. Ультразвуковая дефектоскопия рельсов. - С.-Петербург: «Образование - культура». 1999, стр.37.
2. Патент JP 2000009698.
3. Патент JP 2001183349.
4. Патент JP 11337529.
5. Патент RU 2340495.
6. Заявка RU №2011100881/28 (001133).
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой способ оценки дефектов в головке рельсов и определения профиля поверхности катания | 2022 |
|
RU2785302C1 |
| Ультразвуковой способ определения параметров поверхности катания головки рельса и глубины залегания продольных трещин | 2022 |
|
RU2788475C1 |
| СПОСОБ ОЦЕНКИ ДЕФЕКТА В ГОЛОВКЕ РЕЛЬСА | 2007 |
|
RU2340495C1 |
| Способ обнаружения дефектов в рельсах | 2018 |
|
RU2668941C1 |
| Ультразвуковой способ обнаружения дефектов в головке рельса | 2022 |
|
RU2783753C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| Способ обнаружения и определения размеров дефекта | 2016 |
|
RU2650414C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА РАБОЧЕЙ ВЫКРУЖКЕ ГОЛОВКИ РЕЛЬСА | 2013 |
|
RU2545493C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СВАРНОГО СТЫКА РЕЛЬСОВ | 2006 |
|
RU2308029C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ ПРОДОЛЬНЫХ ТРЕЩИН В ГОЛОВКЕ РЕЛЬСА | 2019 |
|
RU2712975C1 |
Использование: для оценки дефекта в головке рельса. Сущность: заключается в том, что в окрестности предполагаемого дефекта на противоположных поверхностях головки рельса устанавливают пары взаимонаправленных электроакустических преобразователей, перемещают все пары электроакустических преобразователей по указанным поверхностям головки рельса, зондируют головку рельса, для чего в каждой паре излучают ультразвуковые сигналы одним и принимают другим электроакустическим преобразователем, обнаруживают линии границ дефекта теневым методом, совместно анализируют их и определяют размеры и местоположение дефекта, пары электроакустических преобразователей первой группы размещают на боковых поверхностях головки рельса, а каждую пару электроакустических преобразователей снабжают второй парой электроакустических преобразователей, такой, чтобы линии зондирования первой и второй пар не были параллельны, при этом перемещения пар электроакустических преобразователей выполняют с шагом, обеспечивающим требуемое разрешение при поиске дефекта, электроакустические преобразователи второй группы пар размещают на поверхности катания и подголовочных поверхностях рельса, при этом электроакустические преобразователи, размещенные на подголовочной поверхности, являются излучающими, при зондированиях второй группой измеряют время распространения УЗ сигнала и вычисляют толщину головки рельса по линии зондирования, а при обнаружении дефекта принимают сигнал, отраженный от дефекта, измеряют время его распространения и рассчитывают глубину залегания дефекта, оценивают степень его опасности. Технический результат: обеспечение возможности с высокой достоверностью выявлять дефекты произвольной ориентации, их размеры и положение. 4 ил.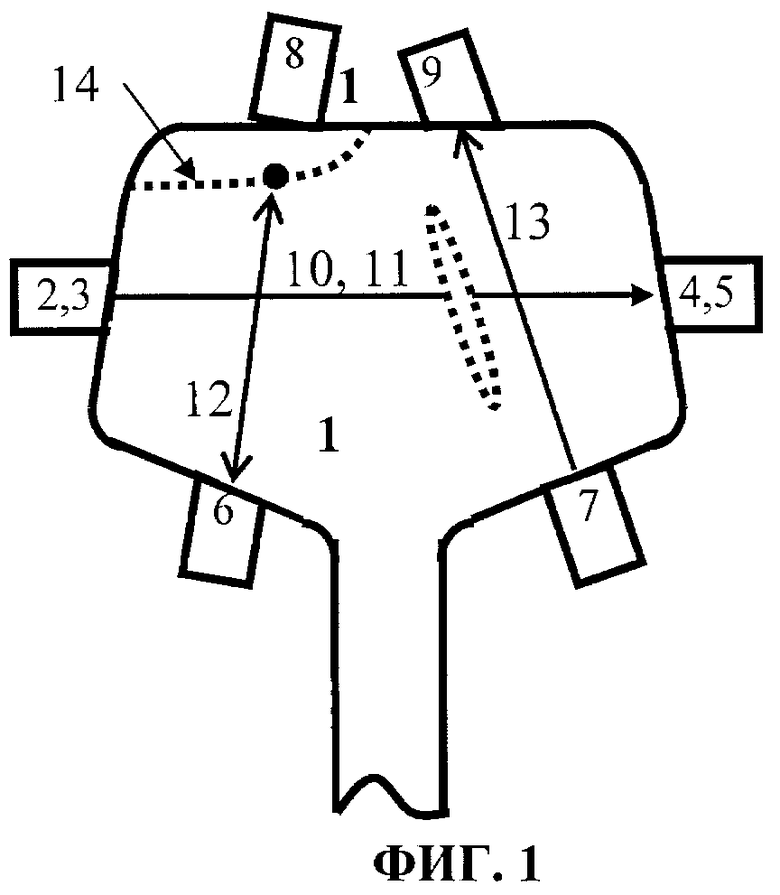
Способ оценки дефекта в головке рельса, заключающийся в том, что в окрестности предполагаемого дефекта на противоположных поверхностях головки рельса устанавливают пары взаимонаправленных электроакустических преобразователей, перемещают все пары электроакустических преобразователей по указанным поверхностям головки рельса, зондируют головку рельса, для чего в каждой паре излучают ультразвуковые сигналы одним и принимают другим электроакустическим преобразователем, обнаруживают линии границ дефекта теневым методом, совместно анализируют их и определяют размеры и местоположение дефекта, пары электроакустических преобразователей первой группы размещают на боковых поверхностях головки рельса, а каждую пару электроакустических преобразователей снабжают второй парой электроакустических преобразователей, такой, чтобы линии зондирования первой и второй пар не были параллельны, отличающийся тем, что перемещения пар электроакустических преобразователей выполняют с шагом, обеспечивающим требуемое разрешение при поиске дефекта, электроакустические преобразователи второй группы пар размещают на поверхности катания и подголовочных поверхностях рельса, при этом электроакустические преобразователи, размещенные на подголовочной поверхности, являются излучающими, при зондированиях второй группой измеряют время распространения УЗ сигнала и вычисляют толщину головки рельса по линии зондирования, а при обнаружении дефекта принимают сигнал, отраженный от дефекта, измеряют время его распространения и рассчитывают глубину залегания дефекта, оценивают степень его опасности.
| WO 8203920 A1, 11.11.1982 | |||
| US 5020371 А, 04.06.1991 | |||
| US 4700574 A, 20.10.1987 | |||
| WO 9422008 A1, 29.09.1994 | |||
| RU 2060493 C1, 20.05.1996 | |||
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ГОЛОВКИ РЕЛЬСОВ | 2001 |
|
RU2184960C1 |

