Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления транспортным средством для управления автономным транспортным средством.
Уровень техники
[0002] Известны автономные транспортные средства, которые обнаруживают внешние условия транспортных средств и безопасным образом автономно предпринимают действия, такие как смены полос движения и правые/левые повороты, с тем, чтобы двигаться по определенным маршрутам движения (ссылка на патентную литературу 1). В таком автономном транспортном средстве, когда возникает новое намерение, например, когда цель пассажира меняется во время движения, или, когда пассажир не удовлетворен планом движения, выбранным системой, пассажиру требуется отдавать команду системе изменять маршрут или план.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация не прошедшей экспертизу заявки на патент (Япония) номер 2001-301484
Сущность изобретения
[0004] Добавление мест для проезда или изменение маршрутов или планов увеличивает и усложняет этапы управления, что препятствует оперативному изменению действия для движения.
[0005] В свете вышеупомянутого, задачей настоящего изобретения является предоставление устройства управления транспортным средством, которое предоставляет возможность пассажиру оперативно изменять действие, выполняемое автономным транспортным средством.
[0006] Устройство управления транспортным средством используется в автономном транспортном средстве, автономно управляемом с возможностью двигаться по определенному маршруту движения, и включает в себя блок представления и блок инструкций. Блок представления показывает, пассажиру автономного транспортного средства, текущее действие автономного транспортного средства и следующее действие автономного транспортного средства, выполняемое после предварительно определенного промежутка времени. Блок инструкций назначает предполагаемые действия согласно операции пассажира как действия, выполняемые автономным транспортным средством, показанные в блоке представления, и отдает команду автономному транспортному средству выполнять действия, назначенные согласно операции пассажира.
Краткое описание чертежей
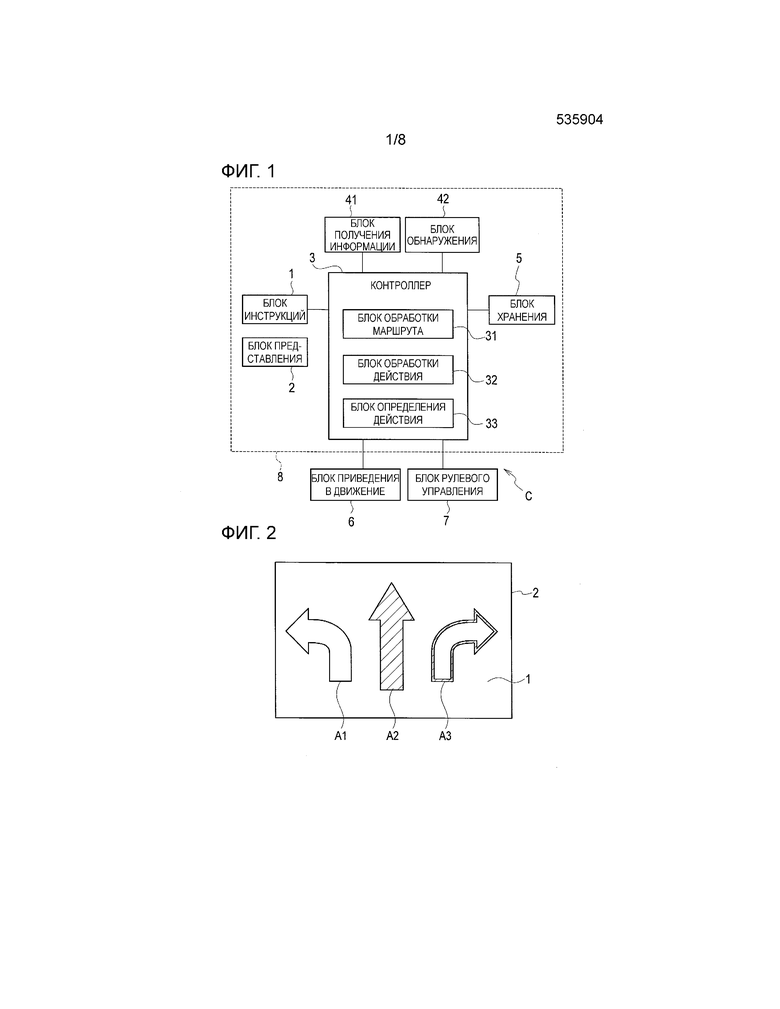
[0007] Фиг. 1 - это блок-схема для описания фундаментальной конфигурации автономного транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 2 - это вид, показывающий блок инструкций и блок представления для описания первого примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
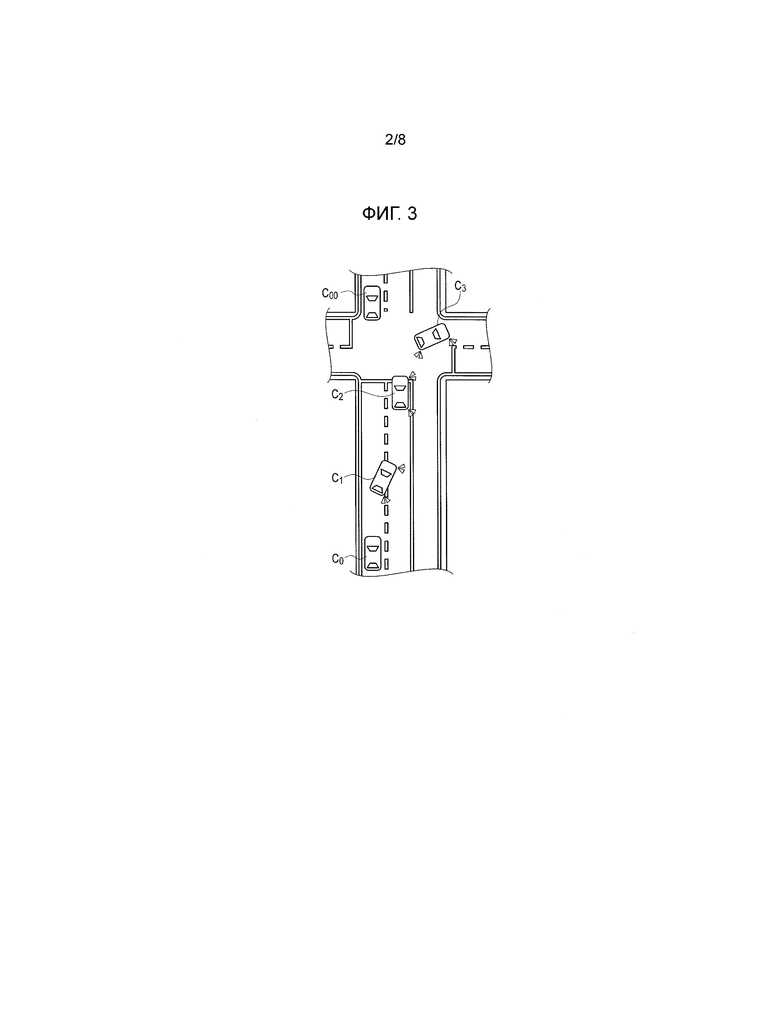
Фиг. 3 - это вид сверху автономного транспортного средства для схематичного описания второго примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
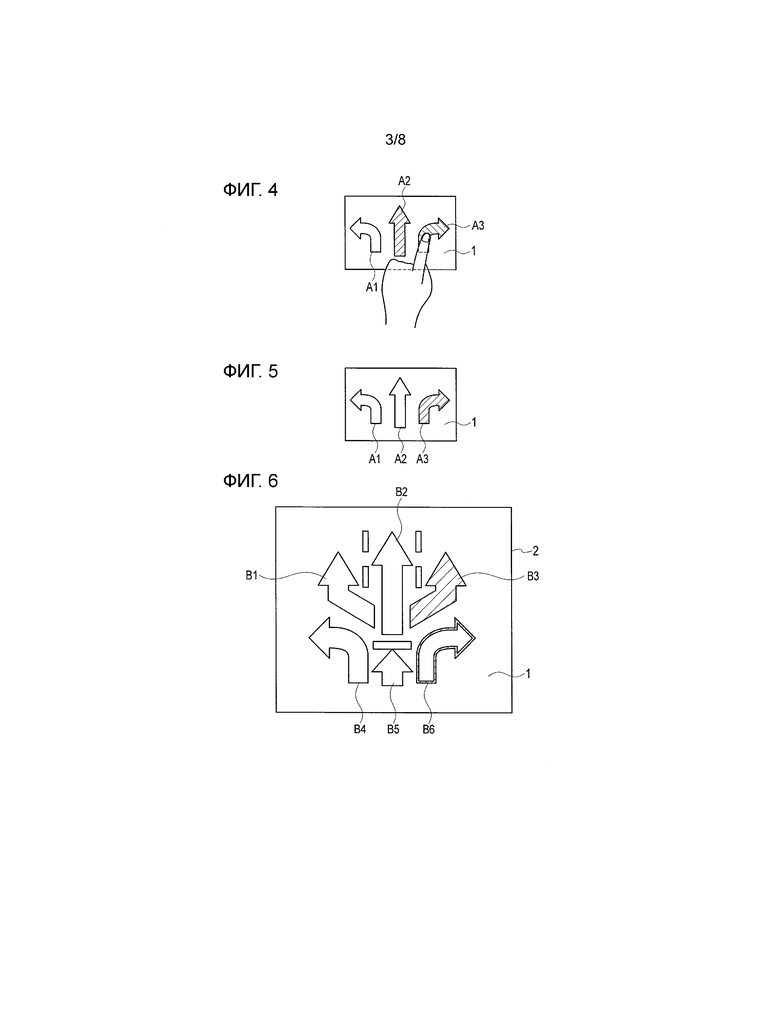
Фиг. 4 - это вид, показывающий блок инструкций и блок представления для описания второго примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
Фиг. 5 - это вид, показывающий блок инструкций и блок представления для описания второго примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
Фиг. 6 - это вид, показывающий блок инструкций и блок представления для описания третьего примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
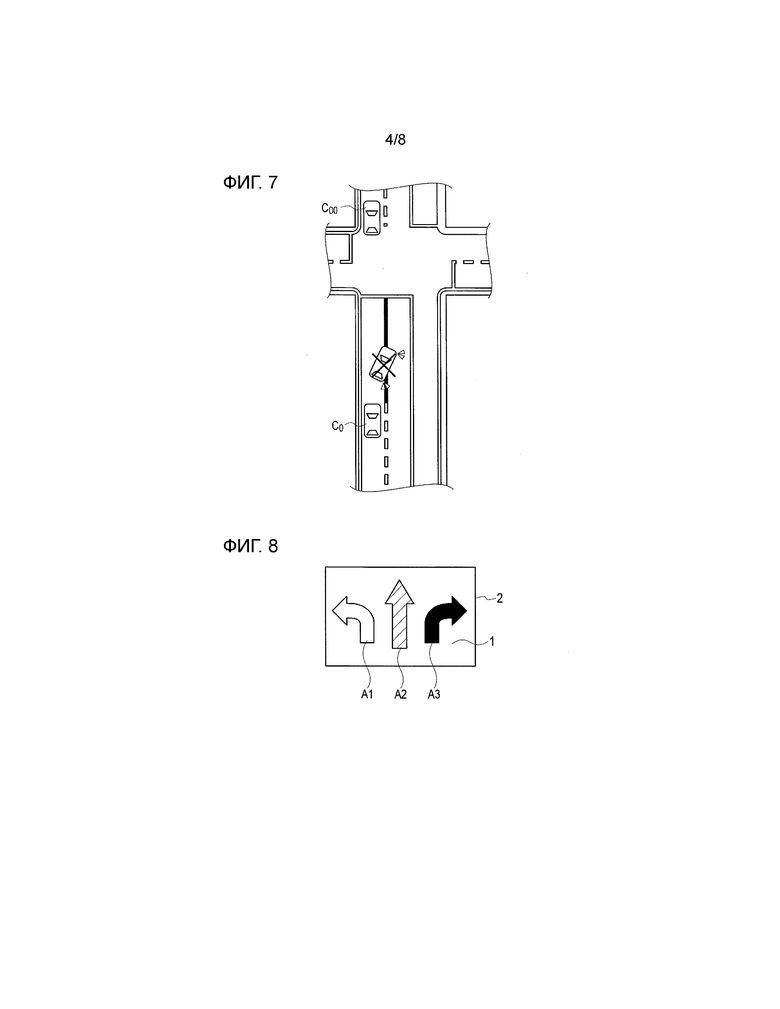
Фиг. 7 - это вид сверху автономного транспортного средства для схематичного описания четвертого примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
Фиг. 8 - это вид, показывающий блок инструкций и блок представления для описания четвертого примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
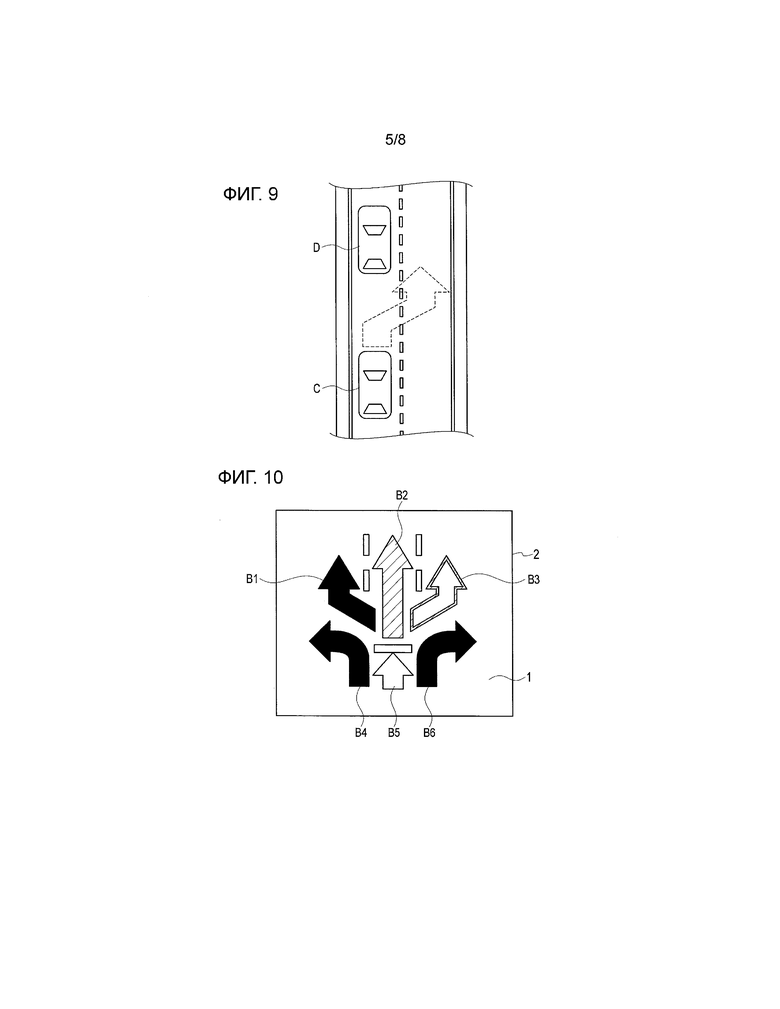
Фиг. 9 - это вид сверху автономного транспортного средства для схематичного описания пятого примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
Фиг. 10 - это вид, показывающий блок инструкций и блок представления для описания пятого примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
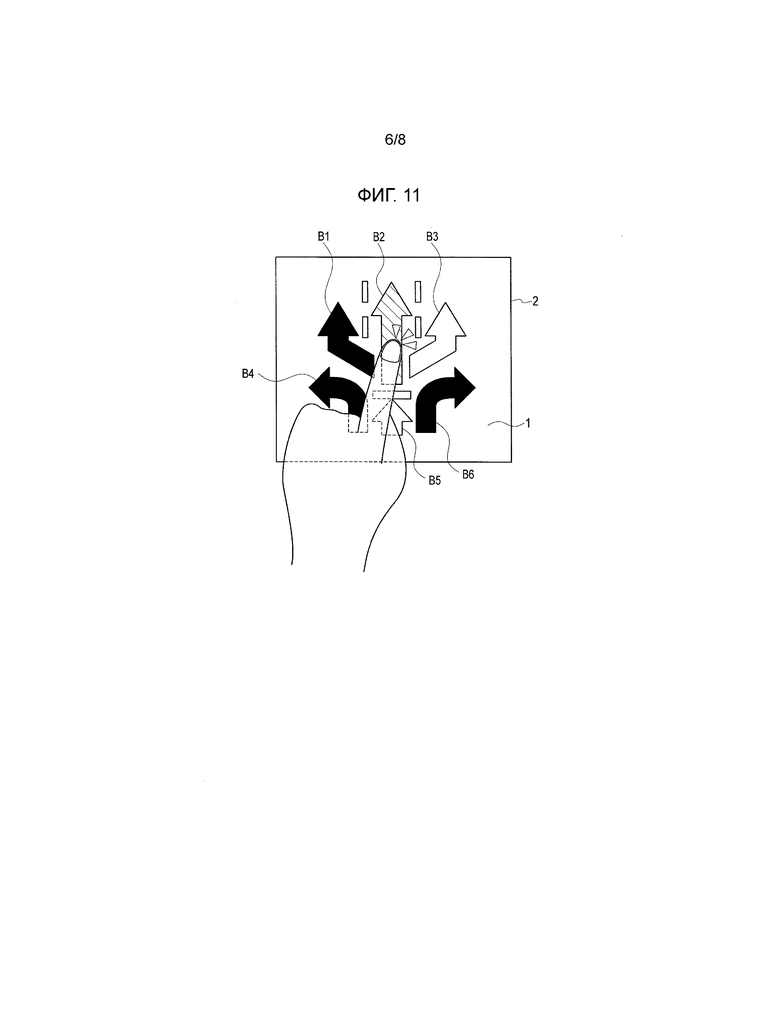
Фиг. 11 - это вид, показывающий блок инструкций и блок представления для описания пятого примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
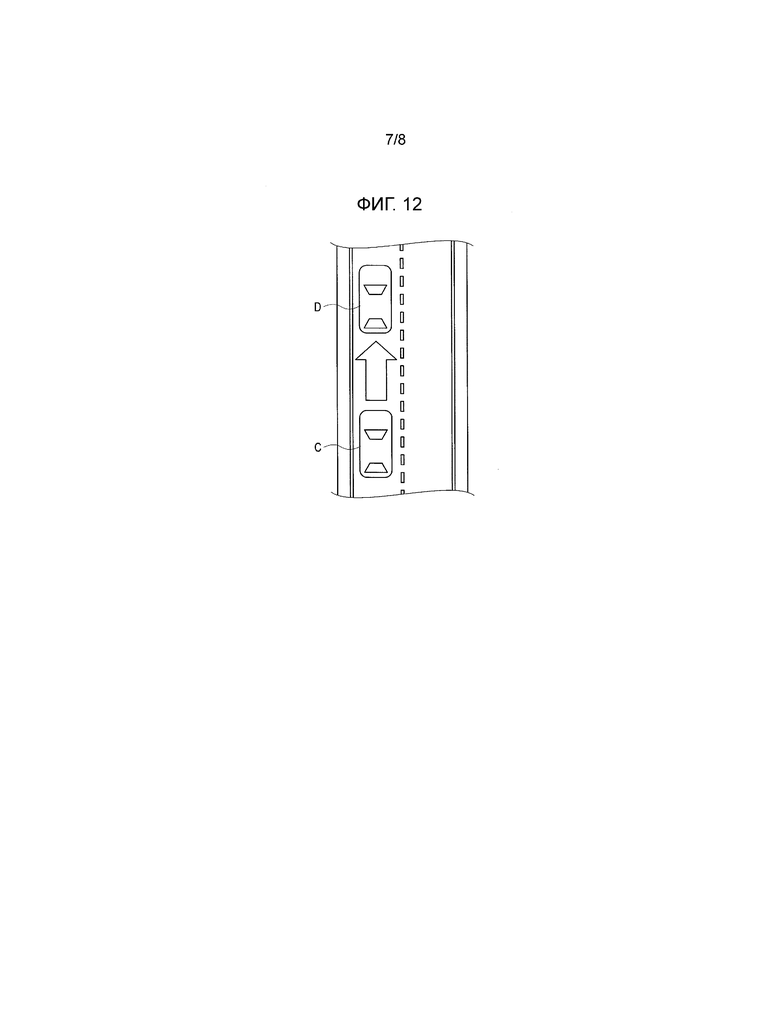
Фиг. 12 - это вид сверху автономного транспортного средства для схематичного описания пятого примера работы устройства управления транспортным средством, включенного в автономное транспортное средство согласно варианту осуществления настоящего изобретения.
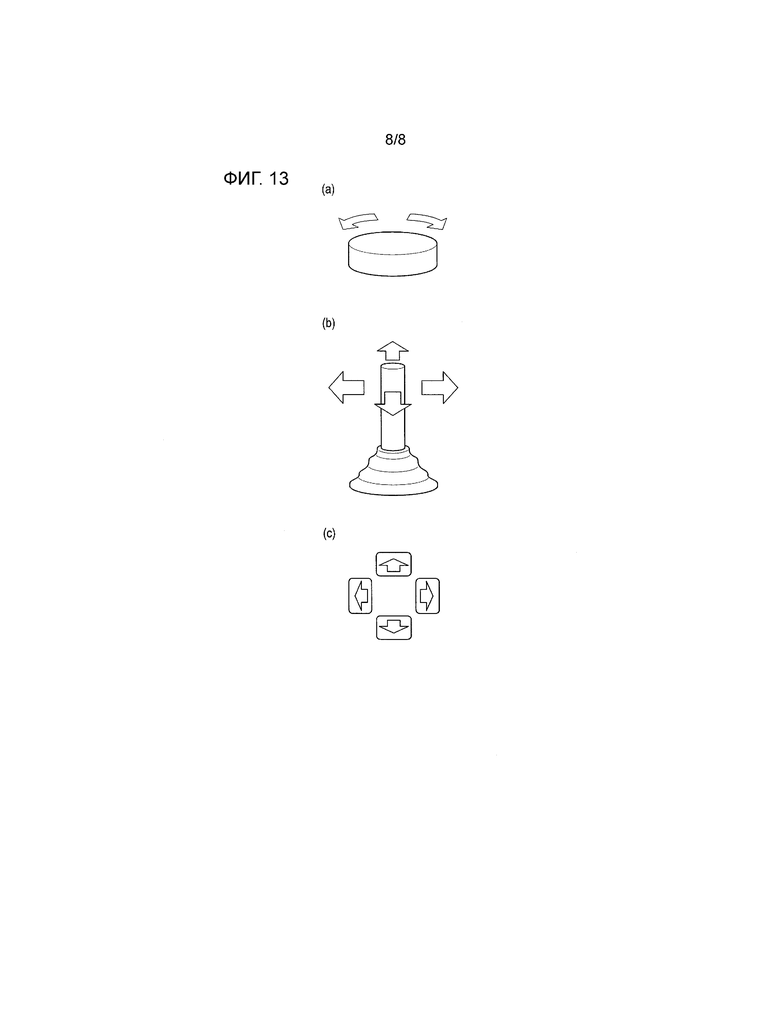
Фиг. 13(a)-13(с) - это виды для описания блоков инструкций, включенных в автономное транспортное средство согласно другим вариантам осуществления настоящего изобретения.
Описание вариантов осуществления
[0008] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи. Идентичные или аналогичные элементы, показанные на чертежах, указываются посредством идентичных или аналогичных ссылок с номерами, и перекрывающиеся описания не повторяются.
[0009] [Автономное транспортное средство]
Как показано на фиг. 1, автономное транспортное средство C согласно варианту осуществления настоящего изобретения включает в себя блок 6 приведения в движение для ускорения и замедления автономного транспортного средства C, блок 7 рулевого управления для рулевого управления автономным транспортным средством C и устройство 8 управления транспортным средством для управления блоком 6 приведения в движение и блоком 7 рулевого управления, чтобы управлять автономным транспортным средством C. Автономное транспортное средство C автономно управляется с возможностью двигаться по маршруту движения, определенному посредством устройства 8 управления транспортным средством.
[0010] Устройство 8 управления транспортным средством включает в себя блок 1 инструкций, который отдает команду автономному транспортному средству C двигаться согласно операции, выполняемой пассажиром автономного транспортного средства C, блок 2 представления, который предоставляет пассажиру автономного транспортного средства C информацию, контроллер 3, который управляет соответствующими компонентами, включенными в автономное транспортное средство C. Устройство 8 управления транспортным средством дополнительно включает в себя блок 41 получения информации, который получает различные виды информации об автономном вождении, блок 42 обнаружения, который обнаруживает внешнюю информацию автономного транспортного средства C, и блок 5 хранения, который хранит данные, необходимые для обработки, выполняемой контроллером 3.
[0011] Блок 1 инструкций включает в себя, например, устройство ввода, которое принимает операцию, выполняемую пассажиром, и вводит сигнал, соответствующий операции, в контроллер 3. Блок 2 представления включает в себя устройство отображения, на котором изображения и символы, предоставленные для пассажира, отображаются, и устройство вывода для воспроизведения голосовых оповещений, такое как динамик. Блок 2 представления показывает пассажиру текущее действие автономного транспортного средства C и следующее действие, выполняемое после предварительно определенного промежутка времени. Блок 1 инструкций и блок 2 представления совместно служат в качестве дисплея с сенсорной панелью, например.
[0012] Контроллер 3 включает в себя блок 31 обработки маршрута, который реализует обработку управления для маршрута движения, по которому автономное транспортное средство C движется, блок 32 обработки действия, который реализует обработку управления для действий автономного транспортного средства C, и блок 33 определения действия, который определяет, разрешать ли действия, выполняемые автономным транспортным средством C на маршруте движения. Контроллер 3 является, например, компьютером, включающим в себя центральный процессор (CPU), чтобы реализовывать обработку вычисления, необходимую для автономного транспортного средства C. Контроллер 3, блок 31 обработки маршрута и блок 32 обработки действия указываются элементами, имеющими логические структуры, и могут быть предоставлены как независимые элементы аппаратных средств или могут быть предоставлены как объединенный элемент аппаратных средств. Контроллер 3 управляет автономным транспортным средством C, чтобы двигаться по маршруту движения безопасным и комфортным образом, согласно информации от блока 41 получения информации, блока 42 обнаружения и блока 5 хранения.
[0013] Блок 31 обработки маршрута задает пункт назначения автономного транспортного средства C согласно инструкции посредством блока 1 инструкций и отыскивает и определяет маршрут движения до пункта назначения от начальной точки на основе условий поиска маршрута, включающих в себя начальную точку, пункт назначения и дорожную информацию. Условия поиска маршрута могут дополнительно включать в себя информацию о дорожном движении относительно маршрута движения и его периферии, временных зонах, классификации дороги и вопросах приоритета по определению маршрута.
[0014] Блок 32 обработки действия управляет действиями, выполняемыми автономным транспортным средством C, такими как движение вперед, правый поворот, левый поворот, смена полосы движения и остановка. Блок 32 обработки действия показывает пассажиру, посредством блока 2 представления, действие автономного транспортного средства C, выполняемое в настоящее время на маршруте движения, определенном посредством блока 31 обработки маршрута, и действие автономного транспортного средства C, выполняемое после промежутка времени от текущего времени.
[0015] Блок 33 определения действия определяет, разрешать ли такое действие автономного транспортного средства C, согласно информации, полученной посредством блока 41 получения информации, информации, обнаруженной посредством блока 42 обнаружения, и законов и правил дорожного движения, сохраненных в блоке 5 хранения.
[0016] Блок 41 получения информации получает информацию внешним образом посредством беспроводной связи и вводит информацию в контроллер 3. Блок 41 получения информации получает текущую позицию автономного транспортного средства C согласно системе позиционирования, такой как глобальная система позиционирования (GPS). Блок 41 получения информации также внешним образом получает дорожную информацию, такую как ограничения дорожного движения или прогноз затора движения. Блок 41 получения информации может внешним образом получать другую информацию, такую как картографические данные.
[0017] Блок 42 обнаружения включает в себя датчики, такие как камера, устройство измерения расстояния и спидометр. Датчики, когда используют электромагнитные волны, могут обнаруживать различные частотные диапазоны, такие как радиоволны, инфракрасный свет и видимый свет. Блок 42 обнаружения обнаруживает внешнюю информацию автономного транспортного средства C, включающую в себя другие транспортные средства, препятствия, совпадения маршрутов движения, ширины дорог, указатели, дорожные знаки, границы полос и дорожные условия, и вводит информацию в контроллер 3.
[0018] Блок 5 хранения включает в себя устройство хранения, такое как магнитный диск или полупроводниковая память. Блок 5 хранения хранит программы, необходимые для обработки, реализуемой посредством контроллера 3, картографические данные и различные виды данных, такие как законы и правила дорожного движения. Блок 5 хранения может также служить в качестве энергозависимого носителя хранения для обработки, реализуемой посредством контроллера 3.
[0019] [Примеры работы устройства управления транспортным средством]
С первого по пятый примеры работы устройства 8 управления транспортным средством будут описаны ниже, в то же время приводя в качестве примера некоторые ситуации. Каждая ситуация описывается как случай, когда автономное транспортное средство C движется по предварительно определенному маршруту движения.
[0020] Первый пример работы
Как показано на фиг. 2, блок 2 представления отображает, по меньшей мере, стрелки A1-A3, указывающие движение вперед, движение направо и движение налево в трех направлениях, когда автономное транспортное средство C движется по предварительно определенному маршруту движения, и показывает пассажиру направления текущего движения и следующего движения после промежутка времени. Блок 1 инструкций составляет дисплей с сенсорной панелью вместе с блоком 2 представления, так что области, соответствующие стрелкам A1-A3, могут управляться пассажиром. Когда одна из стрелок A1-A3, указывающая направление для движения, управляется пассажиром, блок 1 инструкций отдает команду автономному транспортному средству C двигаться в направлении, указанном стрелкой, управляемой пассажиром. Блок 1 инструкций, таким образом, конфигурируется так, что предполагаемые действия могут быть выбраны согласно операции пассажира из действий автономного транспортного средства C, показанных в блоке 2 представления.
[0021] В примере, показанном на фиг. 2, полностью заштрихованная стрелка A2 обозначает, что текущим действием является движение вперед, а стрелка A3 с заштрихованной только наружной кромкой обозначает, что действием, выполняемым после промежутка времени, является правый поворот. Стрелка A2 обозначает, что текущим действием автономного транспортного средства C является движение вперед, а стрелка A3 обозначает, что следующим действием после промежутка времени является правый поворот. Указание соответствующих стрелок A1-A3 меняется в зависимости от управления посредством блока 32 обработки действия, так что пассажир может различать текущее действие автономного транспортного средства C и последующее действие, выполняемое после промежутка времени.
[0022] Второй пример работы
Как показано на фиг. 3, автономное транспортное средство C, показанное в позиции C0, как предполагается, движется прямо по маршруту движения в левой полосе движения дороги с двумя полосами движения, разделенными границей полос движения, в каждом направлении, и приближается к перекрестку впереди. Когда автономное движение продолжается, автономное транспортное средство C поддерживает движение прямо в позиции C00 после предварительно определенного промежутка времени. Блок 2 представления показывает только стрелку A2, обозначающую, что текущим действием является движение вперед. Предположим, что пассажир желает выполнить правый поворот на перекрестке впереди.
[0023] Как показано на фиг. 4, блок 1 инструкций отдает команду блоку 31 обработки маршрута контроллера 3 выполнять правый поворот согласно операции пассажира, выполненной в области, соответствующей стрелке A3. Блок 2 представления уведомляет пассажира о состоянии, что блок 1 инструкций был задействован соответствующим образом, изменяя указание стрелки A3 во время операции в блоке 1 инструкций. Блок 2 представления может, например, изменять цвета между стрелками A1-A3, указывающие текущее действие и действие после промежутка времени и задействованные стрелки A1-A3.
[0024] Блок 31 обработки маршрута изменяет маршрут, чтобы выполнять правый поворот согласно инструкции блока 1 инструкций. Автономное транспортное средство C начинает выполнять изменение направления на соседнюю правую полосу движения, в то же время включая сигнал поворота, согласно управлению посредством контроллера 3. Как показано на фиг. 5, блок 2 представления изменяет указания стрелки A2 и стрелки A3, после того как изменение направления началось, и изменяет указанное текущее действие с движения вперед на правый поворот. Текущее действие, показанное в блоке 2 представления, указывается стрелкой A3 до тех пор, пока правый поворот не будет завершен, и действие возвращается к указанию посредством стрелки A2, обозначающей движение вперед, после того как правый поворот завершен.
[0025] Блок 33 определения действия анализирует безопасность и привилегии изменения направления на правую полосу согласно внешней информации автономного транспортного средства C, обнаруженной посредством блока 42 обнаружения, и законов и правил дорожного движения, сохраненных в блоке 5 хранения. Когда блок 33 определения действия определяет, что изменение направления на правую полосу движения представляется возможным, контроллер 3 управляет блоком 6 приведения в движение и блоком 7 рулевого управления, чтобы приводить автономное транспортное средство C в позицию C1, как показано на фиг. 3, с тем, чтобы заканчивать изменение направления на правую полосу движения.
[0026] Автономное транспортное средство C управляется посредством контроллера 3, чтобы двигаться прямо по правой полосе движения и затем автономно останавливаться в позиции C2 перед перекрестком согласно внешней информации. Автономное транспортное средство C затем въезжает на перекресток, как указано посредством позиции C3, в то же время автономным образом поддерживая безопасное движение, и далее въезжает на пересекающую дорогу, чтобы завершать правый поворот. Когда автономное транспортное средство C завершает правый поворот, блок 31 обработки маршрута снова отыскивает и определяет маршрут движения до пункта назначения.
[0027] Третий пример работы
Как показано на фиг. 6, другие дополнительные метки отображаются в блоке 2 представления, так что блок 1 инструкций может давать больше инструкций автономному транспортному средству C. Блок 2 представления отображает шесть стрелок B1-B6. Стрелки B1-B6 указывают изменение направления на левую полосу, движение вперед, изменение направления на правую полосу движения, левый поворот, остановку и правый поворот. Стрелки A1, A2 и A3, показанные на фиг. 2, соответствуют стрелкам B4, B2 и B6, соответственно.
[0028] Блок 2 представления отображает метки, нанесенные на границы полос движения между стрелками B1, B2 и B3, соответственно указывающие переднее левое направление, переднее направление и переднее правое направление, так что пассажир может интуитивно распознавать, что соответствующие стрелки B1 и B3 указывают. Блок 2 представления отображает метку, нанесенную на позицию стоп-линии на кончике стрелки B5, указывающей переднее направление, так что пассажир может интуитивно распознавать, что стрелка B5 указывает. Метки, отображаемые в блоке 2 представления, могут иметь любые внешние оформления, посредством которых пассажир может распознавать значения соответствующих меток, но должны быть представлены с помощью форм и цветов, которые пассажир легко различает. Метки, указанные стрелками B1-B6, отображаемыми в блоке 2 представления, предоставляют возможность пассажиру легко и интуитивно различать соответствующие действия, выполняемые автономным транспортным средством C.
[0029] В примере, показанном на фиг. 6, полностью заштрихованная стрелка B3 обозначает, что текущим действием является изменение направления на соседнюю правую полосу движения, а стрелка B6 с заштрихованной только наружной кромкой обозначает, что следующим действием после промежутка времени является правый поворот. Блок 2 представления изменяет указания стрелок B1-B6 в зависимости от управления посредством блока 32 обработки действия, так, чтобы пассажир мог различать текущее действие автономного транспортного средства C и последующее действие после промежутка времени. Области, соответствующие стрелкам B1-B6, каждая, могут быть задействованы пассажиром, так что блок 1 инструкций может отдавать команду автономному транспортному средству C предпринимать соответствующие действия, обозначенные стрелками B1-B6, когда соответствующие области задействуются пассажиром.
[0030] Четвертый пример работы
Как показано на фиг. 7, автономное транспортное средство C, показанное в позиции C0, как предполагается, движется прямо по маршруту движения в левой полосе движения дороги с двумя полосами движения в каждом направлении, и приближается к перекрестку впереди. Когда автономное движение продолжается, автономное транспортное средство C поддерживает движение прямо в позиции C00 после предварительно определенного промежутка времени. Блок 2 представления показывает только стрелку A2, обозначающую, что текущим действием является движение вперед. Предположим, что пассажир желает выполнить правый поворот на перекрестке впереди. Однако, автономное транспортное средство C уже въезжает на границу полос движения, указывающую, что изменения полос движения запрещены, и правый поворот, выполненный в позиции C0, является противоправным действием.
[0031] Блок 33 определения действия определяет, что автономное транспортное средство C не может выполнять правый поворот, когда движется около позиции C0, согласно информации, полученной посредством блока 41 получения информации, внешней информации автономного транспортного средства C, обнаруженной посредством блока 42 обнаружения, и законов и правил дорожного движения. Блок 2 представления, например, изменяет указание стрелки A3, обозначающей правый поворот, как показано на фиг. 8, согласно определению посредством блока 33 определения действия, и показывает стрелку A3 с более темным цветом, чем стрелки A1 и A2. Блок 1 инструкций запрещает операцию пассажира в области, соответствующей стрелке A3, в ассоциации с изменением указания, выполняемого посредством блока 2 представления.
[0032] Блок 2 представления изменяет указание метки для запрещения автономному транспортному средству C предпринимать соответствующее действие, в зависимости от дорожной информации, указателей или дорожных знаков, так что метка указывается отлично от других меток, что предоставляет возможность пассажиру интуитивно выбирать другую метку для последующего действия без замешательства. Поскольку блок 1 инструкций запрещает операцию пассажира в ассоциации с изменением указания, выполняемого посредством блока 2 представления, автономное транспортное средство C может управляться с возможностью двигаться безопасным и комфортным образом.
[0033] Пятый пример работы
Как показано на фиг. 9, предполагается, что автономное транспортное средство C движется по левой полосе движения дороги с двумя полосами движения в каждом направлении, другое транспортное средство D движется с более низкой скоростью впереди автономного транспортного средства C, и контроллер 3 тогда выбирает действие, чтобы менять полосу движения для обгона транспортного средства D. Как показано на фиг. 10, например, блок 2 представления меняет указание каждой из стрелки B1, обозначающей изменение направления на левую полосу, стрелки B4, обозначающей левый поворот, и стрелки B6, обозначающей правый поворот, так, чтобы показывать эти стрелки с более темным цветом, чем другие стрелки B2, B3 и B5. Блок 1 инструкций запрещает операцию пассажира в областях, соответствующих стрелкам B1, B4 и B6, в ассоциации с изменением указания, выполняемого посредством блока 2 представления.
[0034] Блок 2 представления информирует пассажира о том, что текущим действием является движение вперед, как указано полностью заштрихованной стрелкой B2, и что последующим действием после промежутка времени является изменение направления на соседнюю правую полосу движения, как указано стрелкой B3 с заштрихованной только наружной кромкой. Затем предполагается, что пассажир желает поддерживать движение прямо, поскольку безопасность имеет приоритет над какой-либо надобностью.
[0035] Как показано на фиг. 11, блок 1 инструкций отдает команду контроллеру 3 поддерживать движение прямо согласно операции пассажира, выполняемой в области, соответствующей стрелке B2, указывающей движение вперед. Соответственно, действие, чтобы обгонять транспортное средство D, выбранное контроллером 3, отменяется, так что автономное транспортное средство C может поддерживать движение прямо безопасным образом, в то же время поддерживая достаточное расстояние от переднего транспортного средства D, как показано на фиг. 12.
[0036] Устройство 8 управления транспортным средством, включенное в автономное транспортное средство C согласно варианту осуществления настоящего изобретения, показывает пассажиру текущее действие автономного транспортного средства C и последующее действие, выполняемое после промежутка времени, так что пассажир может легко определять, соответствует ли его собственное намерение действию автономного транспортного средства C, которое должно быть выполнено. Пассажир может, следовательно, оперативно изменять действие автономного транспортного средства C, когда намерение пассажира не соответствует действию, выбранному автономным транспортным средством C.
[0037] Согласно устройству 8 управления транспортным средством, блок 2 представления показывает действия, выполняемые, по меньшей мере, в трех направлениях, переднем направлении, правом направлении и левом направлении, с тем, чтобы легко различать действия, выполняемые автономным транспортным средством C.
[0038] Согласно устройству 8 управления транспортным средством, блок 1 инструкций показывает стрелки, указывающие направления, в которых автономное транспортное средство C движется, так что пассажир может интуитивно различать действия автономного транспортного средства C.
[0039] Согласно устройству 8 управления транспортным средством, блок 2 представления изменяет указания меток, обозначающих соответствующие действия автономного транспортного средства C, в зависимости от определения, выполняемого посредством блока 33 определения действия, так что пассажир может легко распознавать, какое действие не может быть выполнено, что способствует поддержанию автономного движения безопасным и комфортным образом.
[0040] Согласно устройству 8 управления транспортным средством, блок 1 инструкций запрещает операцию пассажира согласно определению, выполненному посредством блока 33 определения действия, с тем, чтобы управлять автономным транспортным средством C, чтобы оно двигалось безопасным и комфортным образом.
[0041] Согласно устройству 8 управления транспортным средством, блок 33 определения действия определяет, разрешать ли действия, которые должны быть выполнены автономным транспортным средством C согласно дорожной информации, которую блок 42 обнаружения не может обнаружить, что способствует поддержанию автономного движения более безопасным и комфортным образом.
[0042] Согласно устройству 8 управления транспортным средством, блок 2 представления указывает текущее действие автономного транспортного средства C и последующее действие, выполняемое после промежутка времени, отлично друг от друга, так что пассажир может легко различать текущее действие и последующее действие после промежутка времени.
[0043] Согласно устройству 8 управления транспортным средством, пассажир управляет блоком 1 инструкций так, чтобы непосредственно отдавать команду автономному транспортному средству C выполнять смену полосы движения для обгона другого транспортного средства, движущегося впереди автономного транспортного средства C.
[0044] Согласно устройству 8 управления транспортным средством пассажир может преднамеренно останавливать автономное транспортное средство C независимо от настройки или выбора, сделанного автономным транспортным средством C, с тем, чтобы уступать дорогу для других транспортных средств или пешеходов или выполнять остановку для осмотра пейзажей.
[0045] Согласно устройству 8 управления транспортным средством, блок 1 инструкций и блок 2 представления вместе составляют дисплей с сенсорной панелью, так, чтобы предоставлять возможность пассажиру распознавать отображаемые действия автономного транспортного средства C более интуитивным образом и снабжать пассажира другой информацией, такой как уместность каждого действия, более четко.
[0046] (Другие варианты осуществления)
Хотя настоящее изобретение описано выше в отношении вариантов осуществления, настоящее изобретение не имеет намерение быть ограниченным формулировками и чертежами, составляющими часть этого раскрытия сущности. Различные альтернативные варианты осуществления, примеры и практические технологии должны становиться очевидными для специалистов в данной области техники из этого раскрытия сущности.
[0047] Например, в варианте осуществления, описанном выше, блок 1 инструкций может быть устройствами ввода различных типов, такими как устройства ввода дискового типа, рычажного типа и кнопочного типа, как показано на фиг. 13(a)-13(c), чтобы отдавать команду направления для движения. Хотя не показано на чертежах, блок 2 представления может предоставлять информацию посредством голоса из динамика, и блок 1 инструкций может быть голосовым устройством ввода, таким как микрофон, с тем, чтобы отдавать команду автономному транспортному средству C выполнять движение вперед или правый/левый поворот через голосовую операцию, выполняемую пассажиром.
[0048] Настоящее изобретение, конечно, включает в себя различные варианты осуществления, неописанные в этом описании, например, конфигурации, включающие в себя различные варианты осуществления и первый-пятый примеры работы, примененные совместно. Следовательно, объем настоящего изобретения задается только посредством надлежащих признаков согласно формуле изобретения с учетом пояснений, приведенных выше.
[0049] Полное содержимое японской патентной заявки № 2014-054458 (поданной 18 марта 2014 года) содержится в данном документе по ссылке.
Промышленная применимость
[0050] Согласно настоящему изобретению может быть предоставлено устройство управления транспортным средством, которое показывает пассажиру текущее действие автономного транспортного средства и следующее действие, выполняемое после промежутка времени, так что пассажир может оперативно изменять действие автономного транспортного средства, когда действие, выбранное автономным транспортным средством, не совпадает с намерением пассажира.
Список условных обозначений
[0051] A1-A3, B1-B6 стрелка
С автономное транспортное средство
1 блок инструкций
2 блок представления
8 устройство управления транспортным средством
33 блок определения действия
41 блок получения информации
42 блок обнаружения.
Изобретение относится к системам управления автономным транспортным средством. Устройство управления автономным транспортным средством содержит блок представления и блок инструкций. Блок представления выполнен с возможностью одновременно показывать посредством множества стрелок, указывающих движение вперед, пассажиру текущее действие автономного транспортного средства, следующее действие, выполняемое после предварительно определенного промежутка времени, и действие, которое пассажир может выбирать. Блок инструкций выполнен с возможностью назначать намеченные действия согласно операции пассажира как действия, выполняемые автономным транспортным средством, показываемые в блоке представления, и отдавать команду автономному транспортному средству выполнять действия, назначенные согласно операции пассажира. Достигается повышение комфорта управления автономным транспортным средством. 4 н. и 11 з.п. ф-лы, 13 ил.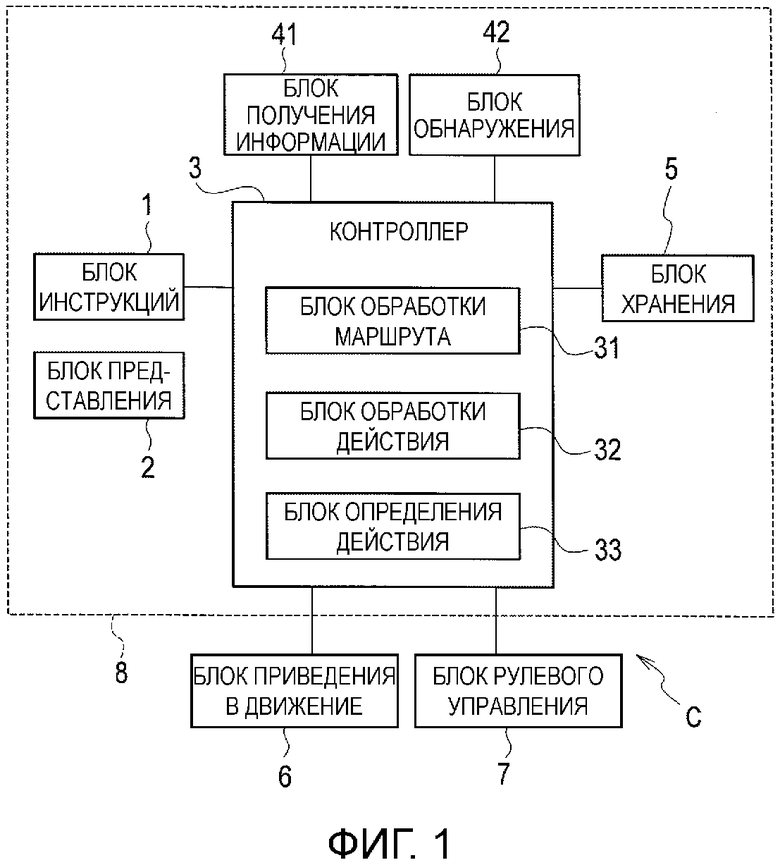
1. Устройство (8) управления транспортным средством, используемое в автономном транспортном средстве (С), автономно управляемом с возможностью двигаться по определенному маршруту движения, причем устройство (8) управления транспортным средством содержит:
блок (2) представления, выполненный с возможностью одновременно показывать посредством множества стрелок, указывающих движение вперед, пассажиру автономного транспортного средства (С) текущее действие автономного транспортного средства (С), следующее действие, выполняемое после предварительно определенного промежутка времени, и действие, которое пассажир автономного транспортного средства (С) может выбирать; и
блок (1) инструкций, выполненный с возможностью назначать намеченные действия согласно операции пассажира как действия, выполняемые автономным транспортным средством (С), показываемые в блоке (2) представления, и отдавать команду автономному транспортному средству (С) выполнять действия, назначенные согласно операции пассажира.
2. Устройство (8) управления транспортным средством по п. 1, в котором блок (2) представления указывает текущее действие автономного транспортного средства (С), следующее действие, выполняемое после предварительно определенного промежутка времени, и действие, которое пассажир автономного транспортного средства (С) может выбирать, отличным друг от друга образом.
3. Устройство (8) управления транспортным средством по п. 1 или 2, в котором блок (2) представления показывает текущее действие автономного транспортного средства (С), следующее действие, выполняемое после предварительно определенного промежутка времени, и действие, которое пассажир автономного транспортного средства (С) может выбирать, компонуя эти действия в блоке (2) представления.
4. Устройство (8) управления транспортным средством по п. 1 или 2, в котором блок (2) представления указывает направления, в которых автономное транспортное средство (С) движется для текущего действия и следующего действия, выполняемого после предварительно определенного промежутка времени, выбранные, по меньшей мере, из трех направлений, включающих в себя переднее направление, правое направление и левое направление.
5. Устройство (8) управления транспортным средством по п. 1 или 2, в котором, когда пассажир управляет стрелками (А1-А3, В1-В6), указывающими направления, в которых автономное транспортное средство (С) движется для действий, выполняемых автономным транспортным средством (С), блок (1) инструкций отдает команду автономному транспортному средству (С) двигаться в направлениях, указанных стрелками (А1-А3, В1-В6), управляемыми пассажиром.
6. Устройство (8) управления транспортным средством по п. 1 или 2, дополнительно содержащее:
блок (42) обнаружения, выполненный с возможностью обнаруживать внешнюю информацию автономного транспортного средства (С); и
блок (33) определения действия, выполненный с возможностью выполнять определение относительно того, разрешать ли каждое действие, выполняемое автономным транспортным средством (С), согласно информации, обнаруженной посредством блока (42) обнаружения, и законам и правилам дорожного движения,
при этом блок (2) представления изменяет указание метки, обозначающей каждое действие, выполняемое автономным транспортным средством (С), в зависимости от определения посредством блока (33) определения действия.
7. Устройство (8) управления транспортным средством по п. 6, при этом блок (1) инструкций запрещает операцию пассажира в зависимости от определения посредством блока (33) определения действия.
8. Устройство (8) управления транспортным средством по п. 6, дополнительно содержащее блок (41) получения информации, выполненный с возможностью внешним образом получать дорожную информацию о маршруте движения посредством беспроводной связи,
при этом блок (33) определения действия выполняет определение относительно того, разрешать ли каждое действие, выполняемое автономным транспортным средством (С), согласно дорожной информации, полученной посредством блока (41) получения информации, информации, обнаруженной посредством информации, и законам и правилам дорожного движения.
9. Устройство (8) управления транспортным средством по п. 1 или 2, при этом, когда текущее действие и следующее действие, выполняемое после предварительно определенного промежутка времени, отличаются друг от друга, блок (2) представления предоставляет пассажиру метки, обозначающие текущее действие и следующее действие, выполняемое после предварительно определенного промежутка времени, указанные отличным друг от друга образом.
10. Устройство (8) управления транспортным средством по п. 1 или 2, в котором блок (1) инструкций отдает команду автономному транспортному средству (С) выполнять изменение направления на соседнюю полосу движения согласно операции пассажира, когда автономное транспортное средство (С) движется по дороге, разделенной на полосы движения.
11. Устройство (8) управления транспортным средством по п. 1 или 2, в котором блок (1) инструкций отдает команду автономному транспортному средству (С) выполнять остановку согласно операции пассажира.
12. Устройство (8) управления транспортным средством по п. 1 или 2, в котором блок (1) инструкций и блок (2) представления совместно служат в качестве дисплея с сенсорной панелью, чтобы показывать метки, обозначающие действия, выполняемые автономным транспортным средством (С), так что области, соответствующие меткам, управляются пассажиром.
13. Способ управления транспортным средством для автономного транспортного средства, автономно управляемого с возможностью двигаться по определенному маршруту движения, причем способ управления транспортным средством содержит этапы, на которых:
одновременно показывают посредством множества стрелок, указывающих движение вперед, пассажиру автономного транспортного средства текущее действие автономного транспортного средства, следующее действие, выполняемое после предварительно определенного промежутка времени, и действие, которое пассажир автономного транспортного средства может выбирать;
назначают намеченные действия согласно операции пассажира как действия, выполняемые автономным транспортным средством, показываемые в блоке представления, и
отдают команду автономному транспортному средству выполнять действия, назначенные согласно операции пассажира.
14. Устройство (8) управления транспортным средством, используемое в автономном транспортном средстве (С), автономно управляемом с возможностью двигаться по определенному маршруту движения, причем устройство (8) управления транспортным средством содержит:
блок (2) представления, выполненный с возможностью одновременно показывать посредством трех стрелок, указывающих движение вперед, пассажиру автономного транспортного средства (С) текущее действие автономного транспортного средства (С), следующее действие, выполняемое после предварительно определенного промежутка времени, и действие, которое пассажир автономного транспортного средства (С) может выбирать; и
блок (1) инструкций, выполненный с возможностью назначать намеченные действия согласно операции пассажира как действия, выполняемые автономным транспортным средством (С), показываемые в блоке (2) представления, и отдавать команду автономному транспортному средству (С) выполнять действия, назначенные согласно операции пассажира.
15. Устройство (8) управления транспортным средством, используемое в автономном транспортном средстве (С), автономно управляемом с возможностью двигаться по определенному маршруту движения, причем устройство (8) управления транспортным средством содержит:
блок (2) представления, выполненный с возможностью одновременно показывать пассажиру автономного транспортного средства (С) текущее действие автономного транспортного средства (С), следующее действие, выполняемое после предварительно определенного промежутка времени, и действие, которое пассажир автономного транспортного средства (С) может выбирать; и
блок (1) инструкций, выполненный с возможностью назначать намеченные действия согласно операции пассажира как действия, выполняемые автономным транспортным средством (С), показываемые в блоке (2) представления, и отдавать команду автономному транспортному средству (С) выполнять действия, назначенные согласно операции пассажира,
причем блок (2) представления показывает текущее действие автономного транспортного средства (С), следующее действие, выполняемое после предварительно определенного промежутка времени, и действие, которое пассажир автономного транспортного средства (С) может выбирать, с отличным друг от друга оформлением.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ДОРОЖНОЙ СИТУАЦИЕЙ С ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2432276C1 |

