Изобретение описывает механизм управления прицепом многосекционного сухопутного транспортного средства, в частности сочлененного автобуса, причем прицеп соединен шарнирами с головным вагоном, а также многосекционное сухопутное транспортное средство на колесах с таким механизмом управления и также способ управления прицепом многосекционного сухопутного транспортного средства на колесах, в частности, сочлененного автобуса.
Сочлененные автобусы достаточно известны по сегодняшнему уровню развития техники как многосекционные сухопутные транспортные средства на колесах. При этом головной вагон охватывает две отстоящих друг от друга оси, причем прицеп сзади имеет одну ось, причем прицеп соединен шарнирами с головным вагоном. Между головным вагоном и прицепом находится переход, который позволяет людям переходить из одной части транспортного средства в другую часть транспортного средства.
Среди описанных ранее сочлененных автобусов различают транспортные средства с экстрактором и выталкивателем; у транспортных средств с экстрактором обычно приводится в движение последняя ось головного вагона, в то время как у транспортных средств с выталкивателем приводится в движение ось прицепа.
Для увеличения пропускной способности таких сочлененных автобусов предусмотрено изготавливать не только двухсекционные транспортные средства, которые известны по сегодняшнему уровню развития техники, но и составлять сочлененные автобусы из трех или других частей транспортных средств. Также предусмотрено увеличить пропускную способность двухсекционных транспортных средств за счет того, что прицеп в колонне из более длинной конструкции будет иметь две или более осей. Допустимы также комбинации таких многоосевых прицепов как прицепов для сцепления целых колонн из сочлененных автобусов. Уже у двухосевых прицепов многосекционного сухопутного транспортного средства на колесах колеса передней оси должны быть поворотными, чтобы позволить прицепу следовать за головным вагоном при движении на повороте в соответствии с ходом поворота. Угол поворота колес передней оси прицепа при этом обычно задается углом поворота минимум одной управляемой оси головного вагона и/или углом между головным вагоном и прицепом и/или углом поворота задней оси прицепа. Угол поворота, который для управляемой оси прицепа задается головным вагоном, теоретически рассчитывается таким образом, чтобы две части транспортного средства, т.е. головной вагон и прицеп, не подвергались никаким поперечным усилиям. То есть в идеале на сухопутное транспортное средство не должны оказывать влияние никакие силы, которые, например, могут привести к тому, что шасси станут перекошенными или, что, например, дно прицепа при движении на повороте сместится, что может вызвать износ шин или повредить проезжую часть дороги.
Правда, фактически оказалось, что транспортное средство все же подвергается воздействию поперечного усилия, которое может привести к соответствующим смещениям или моментам в области шарнирного соединения между двумя частями транспортного средства, т.е. между головным вагоном и прицепом. Это действует, например, тогда, когда фактический угол поворота колес передней оси прицепа отклоняется от заданной величины, которая задается головным вагоном. Следствием этого может быть то, что при соответствующем грунтовом покрытии части транспортного средства на грунте смещаются в сторону. Из-за большой упругости шин и кузова даже маленькая погрешность в измерении угла приводит к большим поперечным усилиям и перекосам.
Причиной того, что актуальный угол поворота прицепа не соответствует значению, заданному управляемой осью головного вагона, могут быть различные факторы влияния. Так, например, рулевое управление с поворотными кулаками вследствие, например, износа может иметь некоторые погрешности, которые все же находятся в диапазоне нормы. Также не всегда гарантировано, что оси транспортных средств абсолютно точно расположены в предусмотренных для этого местах соответствующих шасси. Неточности получаются также вследствие погрешностей в измерительной сенсорной технике, по крайней мере, при регистрации угла поворота управляемой оси головного вагона. То есть погрешности при изготовлении, износ и неточности при измерении и регулировке, а также неточности использованной модели расчета приводят в сумме к неточностям относительно угла поворота колес передней оси прицепа. Это означает далее, что если, например, рассчитанный угол поворота фактически прилегал бы к управляемой оси прицепа, то при таком значении шасси транспортных средств при езде на повороте вследствие привода и тормоза были бы без применения силы, то есть, что в этом случае фактический угол поворота прицепа точно соотносился бы с углом поворота головного вагона. Правда, совокупность названных ранее неточностей может приводить к другому, фактически отклоняющемуся углу поворота у прицепа.
Уже согласно DE 102009017831 A1 в этой связи для управляемого по многим осям сельскохозяйственного или лесохозяйственного автомобиля-тягача с прицепом или полуприцепом, который имеет минимум одну принудительно управляемую ось, предусмотрен расчет угла коррекции. При этом исходят из того, что у автомобиля-тягача, у которого передняя и задняя оси сделаны управляемыми, не только передняя ось привлекается для получения угла поворота управляемой оси прицепа, но и угол поворота управляемой задней оси автомобиля-тягача, а также при необходимости угол излома между головным вагоном и прицепом. Оба угла поворота, а также при необходимости угол излома между транспортными средствами рассчитываются вместе друг с другом и дают тем самым угол поворота для управляемой передней оси прицепа. Тем самым в распоряжении управления прицепом находится угол поворота, который позволяет в щадящем режиме управлять сочлененным транспортным средством, в частности, прицепом. Правда, эта процедура не учитывает отклонения фактического угла поворота передней оси прицепа от значения, заданного управляемой осью головного вагона, когда, например, учитываются погрешности изготовления. Согласно этому лежащая в основе изобретения задача состоит в том, чтобы изготовить механизм управления, при использовании которого можно было бы избежать перекосов частей транспортных средств, то есть головного вагона и/или прицепа и/или смещения многосекционного сухопутного транспортного средства на колесах.
Для решения задачи служат признаки формулы изобретения 1, а также способ согласно независимой формуле изобретения 11. Так, предметом изобретения является механизм управления прицепа многосекционного сухопутного транспортного средства на колесах, в частности, сочлененного автобуса, причем прицеп соединен шарнирами с головным вагоном. При этом прицеп имеет минимум две оси, причем как минимум колеса передней оси сделаны поворотными благодаря, в частности, рулевому управлению с поворотными кулаками. При этом оси выигрышно расположены на расстоянии друг от друга, благодаря чему прицеп выигрышно не сделан как двухосная тележка. Если при езде на повороте сухопутного транспортного средства, включая головной вагон и как минимум прицеп, при этом на головном вагоне и/или прицепе возникают силы и/или моменты и, как следствие этого, перекашивания и/или деформация кручения и/или перекосы - далее называемые также факторами - на частях транспортного средства, то эти силы и/или моменты, и, как следствие этого, факторы можно минимизировать изменением угла поворота поворотных колес передней оси прицепа. То есть, угол поворота поворотных колес передней оси прицепа изменяется до тех пор, пока не будут минимизированы силы и/или моменты, вызываемые вследствие деформации угла поворота, фактически заданного сначала механизмом управления, и оказывающие действие на части транспортного средства.
Выигрышные признаки и конструкции изобретения вытекают из дополнительных пунктов формулы изобретения.
Согласно первой конструкции изобретения при езде на повороте создается угол поворота колес передней оси прицепа благодаря углу поворота колес как минимум одной управляемой оси головного вагона механизма управления как рассчитанная величина, причем при отклонении фактического наклонного положения колес передней оси прицепа от оптимального значения для минимизации применяются силы и/или моменты, действующие на головной вагон и/или прицеп, и, как следствие этого, перекашивания, деформация кручения и/или перекосы путем изменения наклонного положения колес передней оси прицепа благодаря механизму управления. Под управляемой осью понимается такая ось, при которой колеса оси можно развернуть или сдвинуть на определенный угол.
Вторая конструкция изобретения характеризуется тем, что при езде на повороте угол поворота колес передней оси прицепа задается углом между продольной осью головного вагона и продольной осью прицепа, то есть, углом продольного изгиба между двумя транспортными средствами, механизмом управления как расчетное значение, причем отклонение фактического наклонного положения колес передней оси прицепа от оптимального значения механизмом управления применяется для минимизации сил и/или моментов, действующих на головной вагон и/или прицеп, и, как следствие этого, факторов путем изменения угла поворота передней оси прицепа. При этом фактическое наклонное положение передней оси прицепа может соответствовать расчетному значению, правда, оно может отклоняться от него, как раз, например, из-за деформированной шейки оси.
Оптимальное значение в этой связи - это значение, при котором транспортное средство или части транспортного средства, включая шарнирное соединение, наряду с силами и моментами, которые обычно возникают при приведении в движение и торможении, не получают никаких дополнительных сил и/или моментов и, как следствие этого, перекашивания, деформация кручения и/или перекосов, следовательно, исключено то, что колеса в экстремальном случае, если, например, перекосы в частях транспортного средства станут слишком большими, выкатятся за грунтовое покрытие.
В соответствии с этим разница между первой и второй конструкцией заключается в том, что у первой конструкции благодаря углу поворота минимум одной управляемой оси головного вагона задается угол поворота управляемой оси прицепа, в то время как во второй конструкции исходят из наклонного положения двух частей транспортного средства относительно друг друга для расчета значения, задаваемого механизму управления оси прицепа. Допустима также комбинация минимум одного угла поворота управляемых осей головного вагона и наклонного положения транспортных средств по отношению друг к другу.
Если колеса задней оси прицепа являются поворотными, то можно также принять во внимание этот поворотный угол при определении поворотного угла колес передней оси прицепа. Можно выиграть, если предусмотреть включение в механизм управления процессора, в котором рассчитанные значения угла поворота колес минимум одной управляемой оси головного вагона, наклонного положения между головным вагоном и прицепом и/или угла поворота колес задней оси прицепа рассчитываются с поправкой, причем задается поправка механизма управления передней оси прицепа, причем при отклонении наклонного положения колес передней оси прицепа, устанавливаемого на основании поправки, от технически оптимальной поправки механизмом управления для минимизации применяются силы и/или моменты, воздействующие на головной вагон и/или прицеп, и, как следствие этого, параметры, такие как перекашивания, деформация кручения и/или перекосы, благодаря изменению угла поворота передней оси прицепа.
Согласно другому признаку изобретения предусмотрено использование датчиков для расчета сил и/или моментов и, как следствие этого, перекашиваний, деформации кручения и/или перекосов на частях транспортного средства. Так, можно, например, предусмотреть, чтобы для расчета сил и моментов использовался тензодатчик. Перекашивания, деформация кручения и/или перекосы могут, например, быть рассчитаны датчиком перемещений и углов. Отсюда становится ясно, что силы и моменты, с одной стороны, или перекашивания, деформация кручения или перекосы, с другой стороны, могут быть рассчитаны отдельно, в зависимости от того, что проще рассчитывается.
Согласно другому выигрышному признаку предусмотрено, что две части транспортного средства многосекционного сухопутного транспортного средства на колесах соединены друг с другом шарниром. Такой шарнир, который, в частности, имеет два соединенных друг с другом с перекосом шарнирных сегмента, которые расположены соответственно своими концами к шасси головного вагона или прицепа, имеет в качестве сцепного устройства для соединения с минимум одной частью транспортного средства минимум один резинометаллический подшипник. То есть, головной вагон и прицеп могут быть соединены с соответствующим сегментом шарнира с помощью резинометаллического подшипника. Известна конструкция таких резинометаллических подшипников для соединения шарнирных сегментов с шасси головного вагона или прицепа. Согласно одному признаку изобретения в области резинометаллических подшипников выигрышно предусмотрен один датчик для расчета силы и/или момента или, как следствие этого, факторов, таких как перекашиваний, деформация кручения и/или перекосов, чтобы затем минимизировать эти силы и/или моменты и, как следствие этого, факторы путем изменения угла поворота колес передней оси прицепа, как это уже было объяснено в другом месте.
Как уже было сказано, шарнир транспортного средства включает два поворотных относительно друг друга шарнирных сегмента, причем шарнир транспортного средства имеет измерительное устройство для определения наклонного положения обоих шарнирных сегментов по отношению друг к другу. То есть, благодаря такому измерительному устройству, например, так называемому датчику угла поворота, положение транспортных средств по отношению к их средней продольной оси можно определить как воображаемые оси относительно друг друга, а этот угол может служить для определения угла поворота поворотных колес оси прицепа. Применяется такой механизм управления как для транспортных средств с экстрактором, так и для транспортных средств с выталкивателем.
Предметом изобретения является также многосекционное сухопутное транспортное средство на колесах с управлением или регулировкой механизма управления согласно одной из формул изобретения 1-7.
Также предметом изобретения является способ управления прицепом многосекционного сухопутного транспортного средства на колесах, в частности, сочлененного автобуса, причем прицеп соединен с головным вагоном, причем прицеп имеет минимум две отстоящие друг от друга оси, причем головной вагон имеет минимум одну ось с поворотными колесами, причем по меньшей мере колеса передней оси прицепа сделаны поворотными, причем способ включает следующие шаги:
- расчет угла поворота колес передней оси прицепа на основе угла между головным вагоном и прицепом, и/или наклонного положения колес как минимум одной управляемой оси головного вагона и/или наклонного положения колес задней оси прицепа;
- регулировка угла поворота колес передней оси прицепа на основе рассчитанного угла поворота;
- расчет воздействующих на головной вагон и/или прицеп сил и/или моментов, как следствие этого перекашиваний, деформации кручения и/или перекосов;
- приблизительная минимизация сил и/или моментов и/или перекашиваний и/или деформации кручения и/или перекосов путем изменения угла поворота колес передней оси прицепа.
При этом предусмотрено, что если колеса нескольких осей направляются на головном вагоне, то можно обратить внимание по крайней мере на угол поворота колес двух осей для определения угла поворота колес передней оси прицепа.
На основании чертежей изобретение ниже объясняется подробнее.
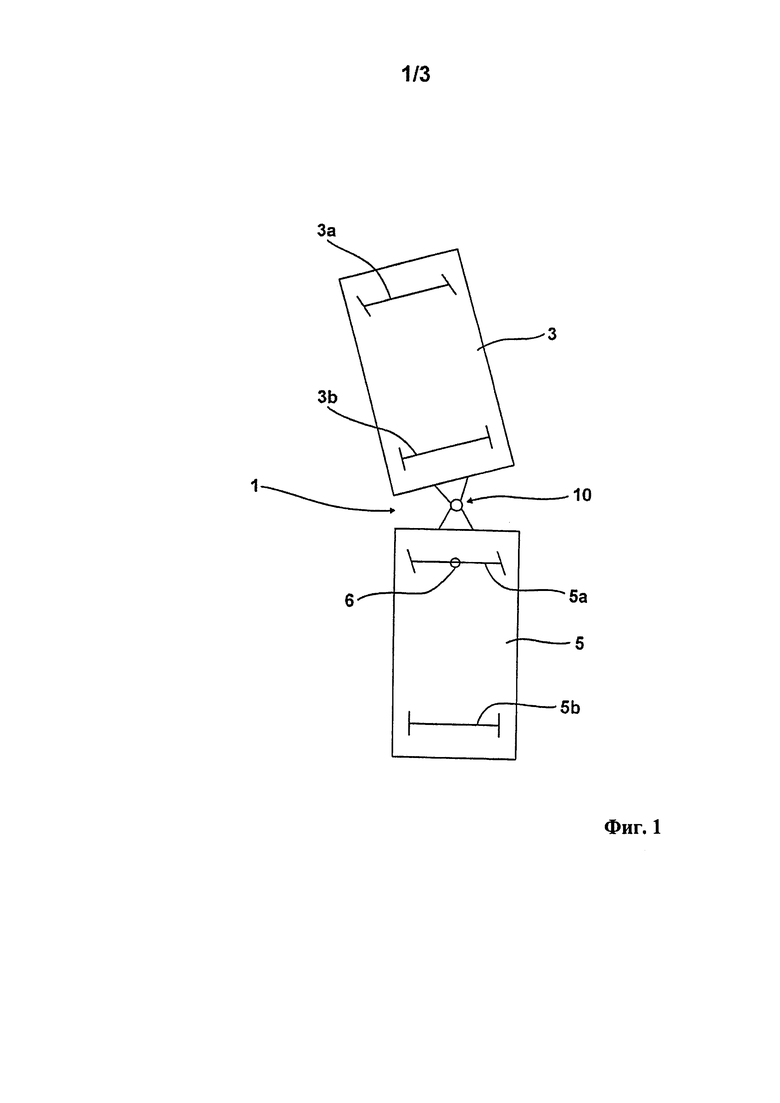
Фиг. 1 показывает схематически шарнирное транспортное средство.
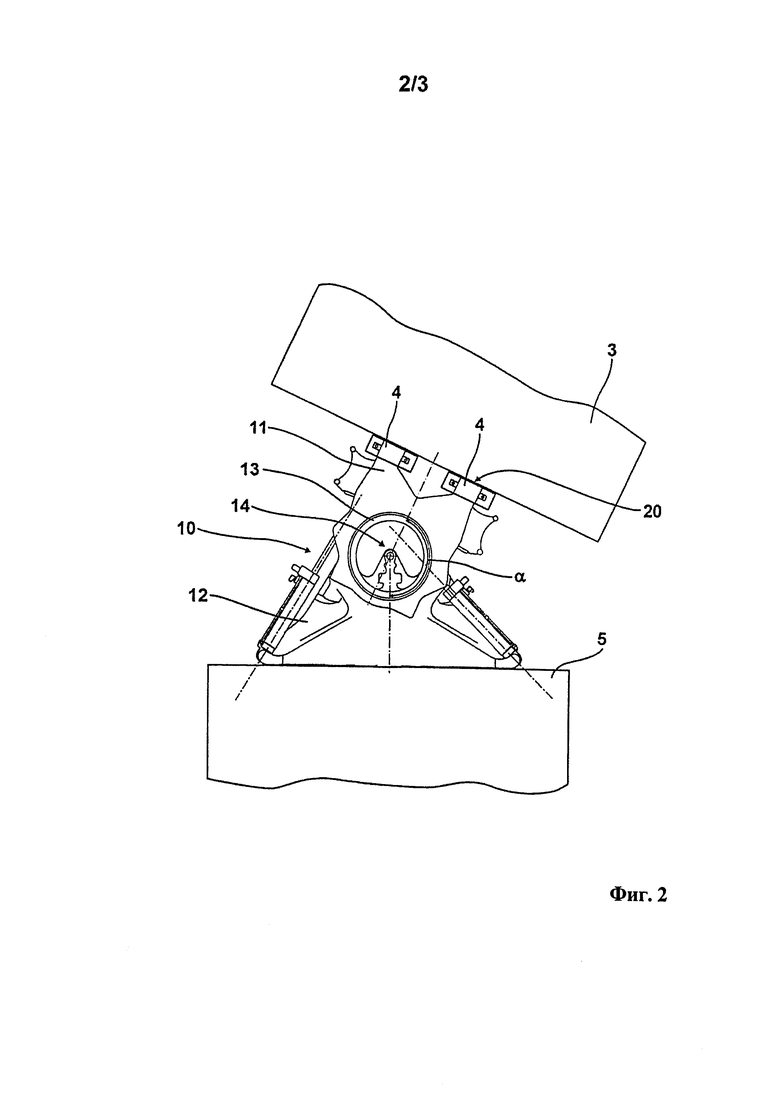
Фиг. 2 показывает шарнир транспортного средства с обозначенным головным вагоном и прицепом.
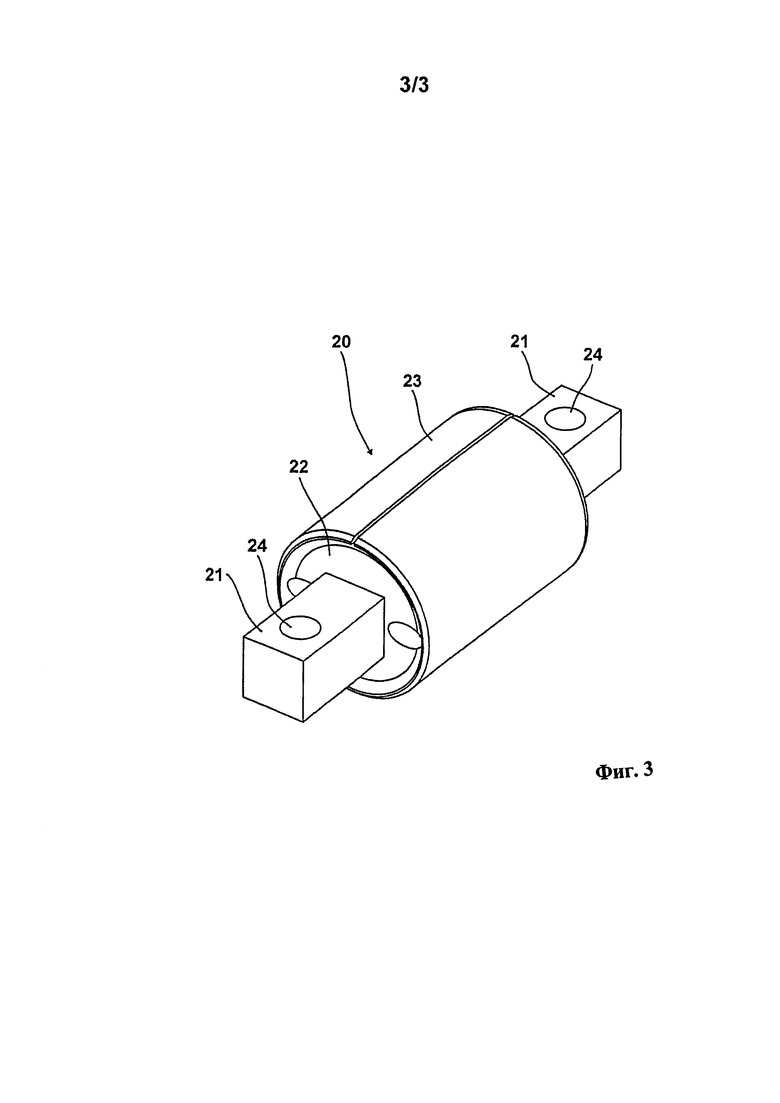
Фиг. 3 показывает резинометаллический подшипник.
Согласно фиг. 1 обозначенное цифрой 1 шарнирное транспортное средство имеет головной вагон 3 и прицеп 5. Головной вагон 3 и прицеп 5 соединены шарниром 10. Как головной вагон 3, так и прицеп 5 имеют соответственно две оси 3а, 3b или 5а, 5b. При этом колеса передней оси 3а головного вагона 3 сделаны поворотными, причем то же относится и к колесам передней оси 5а прицепа 5. Головной механизм передней оси 5а прицепа 5 включает рулевое управление с поворотными кулаками и обозначен цифрой 6. Колеса задней оси прицепа 5 могут при этом также быть поворотными.
На фиг. 2 представлена конструкция шарнира 10. Шарнир 10 включает два шарнирных сегмента 11, 12, которые являются вращающимися и соединены друг с другом вращающейся опорой 13. Во вращающейся опоре 13 расположен так называемый датчик угла поворота 14, с помощью которого можно рассчитать наклонное положение двух шарнирных сегментов 11, 12 по отношению друг к другу и тем самым положение головного вагона относительно прицепа. Угол поворота обозначен на фиг. 2а.
Соединение шарнира 10 с головным вагоном 3 осуществляется двумя резинометаллическими подшипниками 20. Конструкцию двух резинометаллических подшипников видно на фиг. 3. Такой резинометаллический подшипник включает шейку оси 21, которая устанавливается через эластомерную подушку 22 в металлической гильзе, которая образует корпус 23, под предварительным натяжением. Такие резинометаллические подшипники достаточно известны по сегодняшнему уровню развития техники. Резинометаллический подшипник 20 с корпусом 23 захватывается соответствующим сверленым отверстием с шарнирным сегментом 11. Шейка оси 21 имеет на своих концах, выступающих из корпуса 23, одно сверленое отверстие 24, которое служит для захвата винта с целью соединения с кронштейном подшипника 4, расположенном на шасси головного вагона 3. В области резинометаллического подшипника, и в самом резинометаллическом подшипнике, могут располагаться датчики (не изображено), которые служат для регистрации сил, моментов, перемещений, деформации кручения и/или перекосов. Это могут быть по отдельности, например, динамометрические датчики, тензодатчик или также датчики перемещения или угловые датчики.
Список обозначений:
1 Шарнирное транспортное средство
3 Головной вагон
3а Передняя ось
3b Задняя ось
4 Кронштейн подшипника
5 Прицеп
5а Передняя ось
5b Задняя ось
6 Механизм управления (рулевое управление с поворотными кулаками)
10 Шарнир транспортного средства
11 Шарнирный сегмент
12 Шарнирный сегмент
13 Вращающаяся опора
14 Датчик угла поворота
20 Резинометаллический подшипник
21 Шейка оси
22 Эластомерная подушка
23 Корпус
24 Сверленое отверстие
Группа изобретений относится к механизму управления прицепом сочлененного автобуса. Сочлененный автобус состоит из подвижно соединенных головного вагона и прицепа и содержит два шарнирных сегмента, соединенные друг с другом посредством вращающейся опоры. Прицеп имеет не менее двух осей и имеет механизм управления, в котором колеса передней оси прицепа являются управляемыми. Во время движения на повороте сочлененного автобуса силы и/или моменты, воздействующие на головой вагон и прицеп, вытекающие из этого маневра и/или поворота, и/или перекоса, минимизируются посредством изменения угла поворота колес передней оси прицепа. Достигается снижения действия поперечных сил, действующих на сочлененный автобус при поворотах. 3 н. и 8 з.п. ф-лы, 3 ил.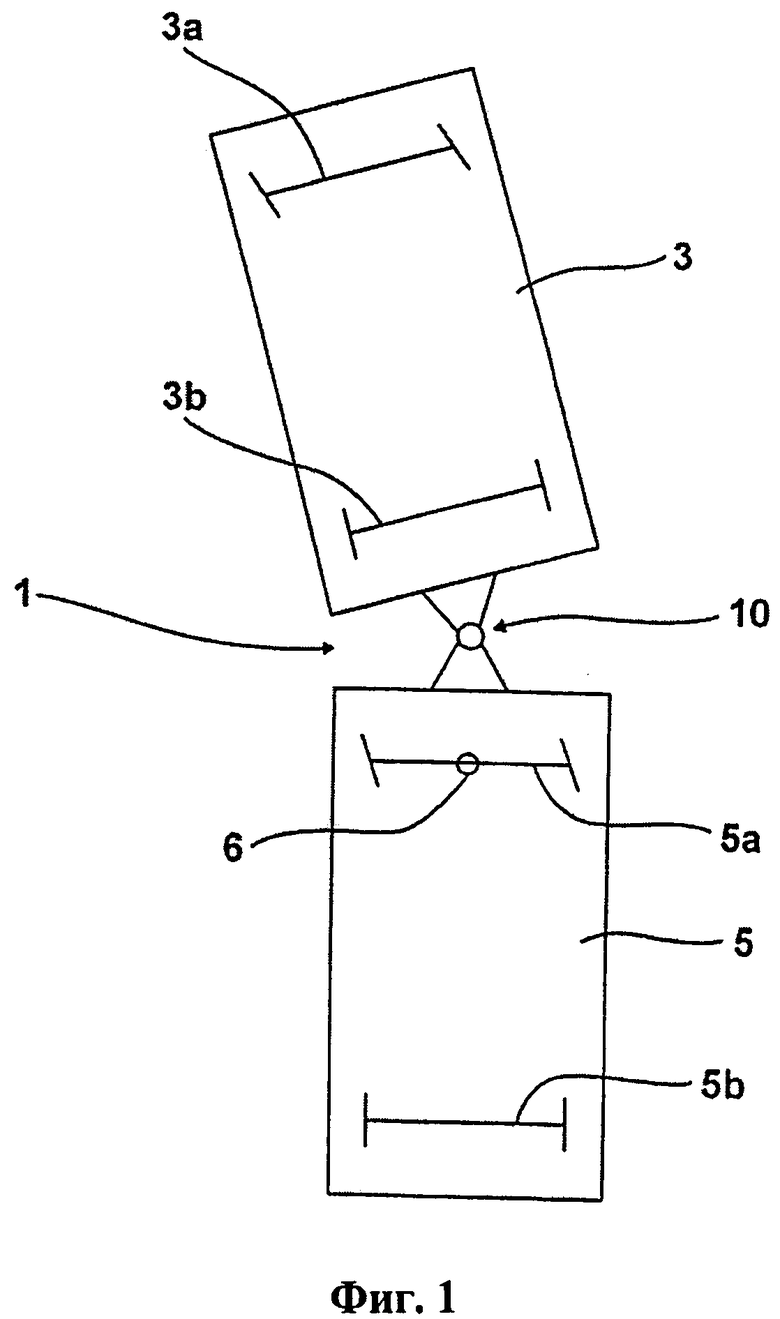
1. Сочлененный автобус, состоящий из нескольких частей, в котором головной вагон (3) и прицеп (5) подвижно соединены в сочлененное транспортное средство (10), содержащее два шарнирных сегмента (11, 12), соединенные друг с другом посредством вращающейся опоры, в котором прицеп (5) имеет не менее двух осей (5а, 5b), и имеет механизм управления, в котором по меньшей мере колеса передней оси (5а) прицепа (5) являются управляемыми, при этом во время движения на повороте сочлененного автобуса силы и/или моменты, воздействующие на головой вагон (3) и прицеп (5), вытекающие из этого маневра, и/или поворота, и/или перекоса, минимизируются посредством изменения угла поворота колес передней оси (5а) прицепа (5).
2. Сочлененный автобус согласно п. 1, отличающийся тем, что при езде на повороте задается угол поворота колес передней оси (5а) прицепа (5) с помощью угла поворота колес минимум одной управляемой оси (3а) головного вагона (3) механизма управления (6) передней оси прицепа как расчетное значение, причем при отклонении фактического наклонного положения колес передней оси (5а) прицепа (5) от оптимального значения механизмом управления для минимизации используются воздействующие на головной вагон (3) и прицеп (5) силы и/или моменты и, как следствие этого, перемещения, деформации кручения и/или перекосы путем изменения наклонного положения колес передней оси (5а) прицепа (5) посредством механизма управления (6).
3. Сочлененный автобус согласно п. 1 или 2, отличающийся тем, что при езде на повороте задается угол поворота колес передней оси (5а) прицепа (5) как рассчитанное значение благодаря углу между продольной осью головного вагона (3) и продольной осью прицепа (5) механизма управления, причем при отклонении фактического наклонного положения колес передней оси (5а) прицепа (5) от оптимального значения механизмом управления (6) для минимизации используются воздействующие на головной вагон (3) и прицеп (5) силы и/или моменты и, как следствие этого, перемещения, деформации кручения и/или перекосы путем изменения угла поворота передней оси (5а) прицепа (5) посредством механизма управления (6).
4. Сочлененный автобус согласно п. 1 или 2, отличающийся тем, что при езде на повороте задается угол поворота колес передней оси (5а) прицепа (5) как рассчитанное значение благодаря углу поворота колес задней оси прицепа (5) механизма управления передней оси прицепа, причем отклонение фактического наклонного положения колес передней оси (5а) прицепа (5) от оптимального значения механизмом управления (6) используется для минимизации воздействующих на головной вагон (3) и прицеп (5) сил и/или моментов и, как следствие этого, перемещений, деформации кручения и/или перекосов путем изменения угла поворота передней оси (5а) прицепа (5) посредством механизма управления (6).
5. Сочлененный автобус согласно п. 1 или 2, отличающийся тем, что механизм управления (6) имеет процессор, в котором рассчитанные значения угла поворота колес минимум одной управляемой оси головного вагона (3) и/или наклонного положения между головным вагоном (3) и прицепом (5), и/или угла поворота колес задней оси прицепа (5) рассчитываются как поправка, причем задается поправка механизма управления передней оси (5а) прицепа, причем при отклонение установленного на основании этой поправки наклонного положения колес передней оси (5а) прицепа (5) от технически оптимальной поправки механизмом управления (6) для оптимизации используются воздействующие на головной вагон (3) и прицеп (5) силы и/или моменты и, как следствие этого, перекашивания, деформации кручения и перекосы путем изменения угла поворота передней оси (5а) прицепа (5) посредством механизма управления (6).
6. Сочлененный автобус согласно п. 1 или 2, отличающийся тем, что для расчета сил и/или моментов, перемещений, деформаций кручения и/или перекосов применяются датчики.
7. Сочлененный автобус согласно п. 1 или 2, отличающийся тем, что головной вагон (3) и прицеп (5) многосекционного сочлененного транспортного средства на колесах (1) соединены друг с другом шарниром (10).
8. Сочлененный автобус согласно п. 7, отличающийся тем, что шарнир (10) соединен с головным вагоном (3) и/или прицепом (5) резинометаллическим подшипником (20), причем в области резинометаллических подшипников (20) расположен минимум один датчик для расчета сил и/или моментов или, как следствие этого, перемещений, деформаций кручения и/или перекосов.
9. Сочлененный автобус согласно п. 1 или 2, отличающийся тем, что шарнир (10) включает два вращающихся относительно друг друга шарнирных сегмента (11, 12), причем шарнир (10) имеет измерительное устройство для определения наклонного положения сегментов шарнира (11, 12) относительно друг друга.
10. Сочлененный автобус с системой управления для регулировки механизма управления согласно любому предшествующему пункту формулы.
11. Способ управления сочлененным автобусом, состоящим из нескольких частей, в котором головой вагон (3) и прицеп (5) подвижно соединены в сочлененное транспортное средство (10), содержащее два шарнирных сегмента (11, 12), соединенные друг с другом посредством вращающейся опоры, в котором прицеп (5) имеет не менее двух осей (5а, 5b), а головной вагон (3) имеет по меньшей мере одну ось (3а) с управляемыми колесами, в котором по меньшей мере колеса передней оси (5а) задней секции (5) являются управляемыми, причем способ включает следующие шаги:
- расчет угла поворота колес передней оси (5а) прицепа (5) на основе угла между головным вагоном (3) и прицепом (5), и/или наклонного положения колес как минимум одной управляемой оси головного вагона (3), и/или наклонного положения колес задней оси прицепа (5);
- регулировка угла поворота колес передней оси (5а) прицепа на основе рассчитанного угла поворота;
- расчет воздействующих на головной вагон (3) и/или прицеп (5) сил и/или моментов, как следствие этого, перекашиваний, деформации кручения и/или перекосов;
- приблизительная минимизация сил и/или моментов, перекашиваний и/или деформации кручения, и/или перекосов путем изменения угла поворота колес передней оси (5а) прицепа (5).
| US 20071945557 A1, 23.08.2007 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО СО СПЕЦИАЛЬНЫМ ПРИЦЕПОМ НА ДВУХОСНОЙ ТЕЛЕЖКЕ | 2004 |
|
RU2304051C2 |
| US 4344640 A1, 17.08.1982 | |||
| DE 3923680 A, 31.01.1991 | |||
| СЦЕПНОЕ УСТРОЙСТВО ДЛЯ ПРИЦЕПА | 2004 |
|
RU2342258C2 |

