Изобретение относится к области средств контроля и регистрации, а именно контроля и регистрации работы транспортных средств, предпочтительно безрельсовых, и может быть использовано при контроле качества вождения транспортных средств, в том числе, для предотвращения ДТП.
Заявляемое техническое решение основано на том, что понятие, обозначенное термином небезопасное (агрессивное, опасное) вождение - это оценка качества вождения транспортного средства, и в этом термине заложено смысловое понимание небезопасного способа управления транспортным средством, способного принести ущерб другим участникам дорожного движения.
Заявляемое техническое решение констатирует вероятностный характер термина небезопасное, т.е. агрессивное, опасное вождение, что обозначает попытку измерения вероятности возникновения ДТП в диапазоне от 0% - когда ДТП невозможно, до 100% когда ДТП уже произошло. Заявляемое техническое решение предлагает параметры оценки и их критерии.
Существует несколько физических параметров, при помощи которых можно характеризовать движущийся объект: скорость, ускорение, время в пути.
Скорость - в определенной мере может служить мерилом уровня агрессивности небезопасного вождения, но правила дорожного движения и специальные приборы автоматического измерения скорости не способны ответить на этот вопрос в полной мере в силу технических и юридических ограничений. Например, если имеет место участок дороги, на котором разрешен определенный скоростной максимум, и какой-то водитель позволил себе прокатиться «с ветерком» и даже не перестраивался из ряда в ряд, при этом и других водителей на этом участке не было; - можно ли утверждать, что водитель проявил агрессивное вождение? По существу, нет. Водитель, конечно, нарушил ПДД, но, у него не было шанса проявить агрессивность к кому бы то ни было. Из этого примера можно сделать вывод, что вождение может быть квалифицировано как небезопасное (агрессивное) только при опасном взаимодействии (сближении) водителя (потенциального нарушителя) с другими участниками дорожного движения. И не скорость, а именно резкие перестроения (пересечения траекторий движения транспортных средств), ускорения и торможения способны оказывать влияние от водителя-нарушителя на остальных водителей - участников движения. Нужно еще отметить, что причиной такого поведения на дороге является именно стремление быть первым, обогнать других участников движения. Именно такая «активность» на дороге одного из водителей повышает вероятность возникновения ДТП, что и может быть названо небезопасным (агрессивным) вождением. Таким образом, агрессивным вождением следует признать режим управления автомобилем в потоке других транспортных средств осуществляемый с целью обгона этих других транспортных средств. Степень (уровень) небезопасного вождения (агрессивности) можно определить через сравнение интенсивности управляющих воздействий конкретного водителя (автомобиля) и средней плотности управляющих воздействий всех водителей на данном участке дороги.
В данном заявляемом решении не рассматривается частный случай, когда неопытный водитель в силу неразвитости своих водительских навыков способен быть источником повышенной опасности.
Известны способы оценки параметров вождения движущихся транспортных средств RU 106589, RU 2308385, CN 105139650, CN 105008200, CN 104093618, CN 103150677, ЕР 2958783, WO 2014130178, US 2014236414, US 6392564, US 2002019703, US 2011120202305, GB 2268608.
Известные технические решения характеризуются следующим.
Техническое решение по CN 105008200 (документы - аналоги: ЕР 2958783, O 2014130178, US 2014236414) предназначено для предотвращения столкновения с автомобилем, который подъезжает сзади. Предусматривает индивидуальное определение контролируемого параметра. Аппаратное обеспечение, используемый физический принцип не раскрыты. Не обеспечивает определения уровня небезопасного (агрессивного) вождения.
Техническое решение по US 6392564 предназначено для предотвращения столкновения с автомобилем, который подъезжает сзади, а именно: определяет идентифицирует слишком близко сзади едущий автомобиль по критерию - «более 10 секунд», фотографирует его и рассылает фото адресатам - в полицию, страховым компаниям. Аппаратное обеспечение, используемый физический принцип не раскрыты. Не обеспечивает определения уровня небезопасного (агрессивного) вождения.
Техническое решение по CN 103150677 предназначено для снижения уровня агрессивности вождения определения агрессивного водителя на основе сравнения скоростей движения путем сравнения текущего значения индекса агрессивности с накопленным значением прошлого периода, и, если текущее значение больше, то сигнализирует водителю об этом, в надежде, что водитель одумается и снизит агрессивность. Предусматривает индивидуальное определение контролируемого параметра. Аппаратное обеспечение, используемый физический принцип не раскрыты. Использование для сравнения накопленных статистических значений не обеспечивающим своевременного и точного определения уровня небезопасного (агрессивного) вождения.
Техническое решение по CN 104093618 предназначено для определения величины риска (агрессивного стиля вождения) конкретного водителя на основе измерений с помощью трехстепенного акселерометра, система обработки данных. Предусматривает индивидуальное определение контролируемого параметра. Аппаратное обеспечение, используемый физический принцип не раскрыты. Математический алгоритм и критерии не приведены.
Определение только индивидуального значения параметра недостаточно для вынесения решения об агрессивности так как не подкреплено относительной оценкой.
Использование только индивидуально контролируемого параметра как критерия агрессивности (процесс определения личного значения параметра агрессивности ограничивается этим первым шагом). Не обеспечивает своевременного и точного определения агрессивного водителя.
Техническое решение по CN 105329239 предназначено для определения степени агрессивности вождения на основе собираемой информации, среди которых - акселератор (педаль газа), педаль тормоза, рулевое усилие, данные о перемене рядности (траектории). Предусматривает индивидуальное определение контролируемых параметров штатным оборудованием транспортного средства. Аппаратное обеспечение, используемый физический принцип не раскрыты. Использование только индивидуально контролируемого параметра как критерия агрессивности не обеспечивает своевременного и точного определения агрессивного водителя.
Техническое решение по CN 105139650 предназначено для определения агрессивного водителя на основе сравнения скоростей движения. Предусматривает индивидуальное определение контролируемого параметра и относительное определение параметра. Таким образом, сначала определяются индивидуальные данные, а затем они сравниваются с усредненными данными от участников движения. Аппаратное обеспечение, используемый физический принцип не раскрыты. Использование только скорости движения как критерия агрессивности, является принципиально ошибочным подходом, не обеспечивающим своевременного и точного определения агрессивного водителя.
Техническое решение по US 2002019703 определяет агрессивность вождения и некоординированность водителя на основе собираемой информации о множестве различных параметров. При превышении уровня опасности система передает сигнал тревоги в полицию и другим водителям (автомобилям). Предусматривает индивидуальное определение превышения порогового значения. Аппаратное обеспечение, используемый физический принцип не раскрыты. Использование только индивидуально контролируемых параметров как критерия агрессивности не обеспечивающим своевременного и точного определения уровня небезопасного (агрессивного) вождения.
Техническое решение по GB 2268608 определяет агрессивность вождения путем сравнения параметра движения автомобиля и предустановленного порогового значения. При превышении предустановленных пороговых значений система сигнализирует водителю о необходимости снизить агрессивность. А после аварии система передает сигнал тревоги в полицию и сзади подъезжающим автомобилям. Предусматривает индивидуальное определение превышения порогового значения. Аппаратное обеспечение, используемый физический принцип не раскрыты. Использование только индивидуально контролируемого превышения порогового значения как критерия агрессивности не обеспечивает своевременного и точного определения уровня небезопасного (агрессивного) вождения.
Техническое решение по US 2011120202305 определяет агрессивность вождения путем сравнения ускорения автомобиля и предустановленного порогового значения. Предусматривает индивидуальное определение превышения порогового значения. Аппаратное обеспечение, используемый физический принцип не раскрыты. Использование только индивидуально контролируемого превышения порогового значения как критерия агрессивности не обеспечивает своевременного и точного определения уровня небезопасного (агрессивного) вождения.
Техническое решение по US 6366207 определяет агрессивность вождения путем сравнения параметра движения автомобиля и предустановленного порогового значения. Предназначено для снижения чувства «ярости» или «дорожного гнева». При превышении предустановленных пороговых значений система в «позитивном стиле» выдает сообщение водителю типа - «Давай потише», «Ладно, отпусти его». Предусматривает индивидуальное определение превышения порогового значения. Аппаратное обеспечение, используемый физический принцип не раскрыты. Использование только индивидуально контролируемого превышения порогового значения как критерия агрессивности не обеспечивает своевременного и точного определения уровня небезопасного (агрессивного) вождения.
Известно техническое решение, реализующее способ оценки уровня агрессивности вождения транспортного средства, при котором абонентский терминал получает данные от спидометра, производя математические преобразования, непрерывно или дискретно определяет значения ускорения транспортного средства. Одновременно при наличии в устройстве соответствующих датчиков непрерывно или дискретно определяют значения угловой скорости и характеристики вертикальных колебаний корпуса транспортного средства. Полученные значения характеристик движения транспортного средства (ускорение (а также, возможно, угловая скорость) и характеристики вертикальных колебаний корпуса) сравнивают с предельно допустимыми значениями, введенными в память абонентского и/или диспетчерского терминала. При превышении полученных значений предельно допустимого уровня происходит либо запись указанных значений в память абонентского термина, либо передача их по радиоканалу в память диспетчерского терминала. Если ускорение (торможение) составляет величину больше 0,5 g, то прибор генерирует событие неадекватности вождения. Данное событие регистрирует абонентский терминал с передачей соответствующей информации диспетчерскому терминалу. Соответственно при превышении допустимых параметров колебаний в вертикальной плоскости (и величины угловых ускорений, если их определяют) происходит либо запись информации в память абонентского терминала, и/или передача информации на диспетчерский терминал.
Известно техническое решение аппаратно-программный комплекс «Профессионал», реализующее способ, при котором микропроцессор опрашивает акселерометр с частотой 100 раз с секунду, и, если перегрузка по одной из осей транспортного средства превышает установленные пределы, записывает на носитель информации значения перегрузок по трем осям, время (по Гринвичу), координаты места события, когда было зафиксировано нарушение, а также может включать световую и звуковую сигнализацию, сообщая водителю о нарушении.
Качество вождения транспортного средства определяется (за исключением попадания в дорожно-транспортные происшествия) индивидуально, ограничивается умением плавно тормозить и плавно разгоняться, т.е. умением осуществлять изменение скорости транспортного средства, не мешая езде окружающих транспортных средств, при одновременном обеспечении условий максимальной комфортности поездки для пассажиров. Кроме того, в это понятие входит и умение оценивать обстановку на дороге с предугадыванием развития ситуации, что также приводит к осуществлению плавного или резкого торможения транспортного средства (RU 106589).
Исходя из своего предназначения, комплекс «Профессионал», в частности, способен определять интенсивность управляющих воздействий  которые характеризуют индивидуальные особенности водителей, и сравнивать эти значения с пороговыми или эталонными.
которые характеризуют индивидуальные особенности водителей, и сравнивать эти значения с пороговыми или эталонными.
В данном случае недостатки способа обусловлены тем, что используются только индивидуально контролируемые параметры. Мы можем, исходя из введенных критериев, оценить плавность вождения, но, здесь не обеспечивается определение агрессивного водителя.
Известно устройство оценки качества вождения автомобиля, содержащее спидометр, подключенный к вычислительному средству, выполненному с возможностью определения ускорения автомобиля и сравнения полученных результатов с диапазоном допустимых значений ускорения, отличающееся тем, что вычислительное средство представляет собой абонентский терминал, который дополнительно содержит средство навигации и связи и к которому подключен датчик регистрации колебаний корпуса автомобиля в вертикальной плоскости, а в блок памяти абонентского терминала записан диапазон допустимых величин колебаний корпуса автомобиля в вертикальной плоскости, при этом абонентский терминал выполнен с возможностью сравнения определенных величин колебаний корпуса автомобиля в вертикальной плоскости с диапазоном допустимых значений, записи результатов сравнения по ускорению автомобиля и колебаниям корпуса автомобиля в вертикальной плоскости в блок памяти и/или передачи в диспетчерский пункт сведений о несовпадении определенных значений ускорения автомобиля и величин колебаний корпуса автомобиля в вертикальной плоскости с диапазоном допустимых значений. К абонентскому терминалу дополнительно подключен гироскоп, предназначенный для измерения угловой скорости автомобиля. (RU 2308385, прототип).
Недостатки известного способа заключаются в том, что сравнение значений (индивидуальное определение параметра) с пороговым значением, не может служить в качестве эффективного корректного критерия агрессивности, является подходом, не обеспечивающим своевременного и точного определения уровня небезопасного (агрессивного) вождения, осуществляющего режим управления автомобилем в потоке других транспортных средств с целью обгона этих других транспортных средств.
Технической задачей изобретения является создание способа объективной оценки уровня агрессивности вождения транспортного средства (автомобиля) в потоке движущихся транспортных средств.
Технический результат, обеспечивающий решение поставленной задачи состоит в том, что обеспечивается своевременное и точное (с минимальной вероятностью ошибочного решения) определения агрессивного водителя на основе измерений частного и обобщенного значений и аппаратной реализации статистической обработки измеренных значений ускорения в любом направлении в пространстве всех и каждого участников движения на отрезке дороги.
Сущность изобретения состоит в том, что способ оценки уровня небезопасного вождения транспортного средства в потоке движущихся транспортных средств, при котором предусматривается при въезде на контролируемый участок дороги автомобили опрашиваются со стационарного источника периодически формируемым сигналом запроса данных, который принимают установленные на транспортных средствах приборы-регистраторы, с функцией приема и передачи данных, которые предают ответные сообщения определенных в результате измерений и вычислений, идентифицируемых как изменение параметра ускорения, значение интенсивности управляющих воздействий (водителей) каждого транспортного средства с идентификационными данными каждого транспортного средства, координатами и временем события, причем актуальное значение периодически, за временной период между предыдущим и текущим сообщением, вычисляется и обновляется, а по результатам собранной информации от автомобилей вычисляется среднее значение интенсивности управляющих воздействий за временной период между предыдущим и текущим сообщением для данного контролируемого участка дороги и уровень превышения интенсивности управляющих воздействий конкретного автомобиля над средним уровнем интенсивности потока автомобилей для данного участка в данный момент, который определит уровень небезопасного (агрессивного) вождения этого конкретного водителя.
Предпочтительно, интенсивность управляющих воздействий водителя определяется как изменение параметра ускорения движения, зафиксированное с помощью трехстепенного акселерометра.
Предпочтительно, делается вывод о возникновении повышения вероятности возникновения ДТП на 80% для водителя транспортного средства, который в конкретный момент времени воспроизвел интенсивность управляющих воздействий на 20% превышающий существующее усредненное значение интенсивности управляющих воздействий потока транспортных средств на дороге - в соответствии с законом Парето.
Предпочтительно, усредненное значение интенсивности управляющих воздействий  вычисляют с помощью стационарного блока-вычислителя, находящегося на вышке, а данные о выявлении небезопасного, т.е. агрессивного вождения передаются на стационарный сервер, где происходит их хранение и дальнейшая обработка.
вычисляют с помощью стационарного блока-вычислителя, находящегося на вышке, а данные о выявлении небезопасного, т.е. агрессивного вождения передаются на стационарный сервер, где происходит их хранение и дальнейшая обработка.
Предпочтительно, операцию сравнения текущего значения интенсивности управляющих воздействий каждого транспортного средства с упомянутым усредненным значением интенсивности управляющих воздействий на этом участке дороги производят с помощью стационарного блока-вычислителя, находящегося на вышке в соответствии с соотношениями:
Предпочтительно, данные, которые отфильтровал и запомнил блок-вычислитель, находящийся на вышке, подготавливаются и передаются на стационарный сервер, где происходит хранение и возможна дальнейшая обработка данных в интересах заказчиков информации.
Заявляемый способ учитывает тот факт, что все водители обладают разными психофизическими и эмоциональными особенностями, возрастом, опытом вождения и эти факторы определяют так называемый стиль вождения и предпочтения при управлении транспортным средством.
Заявляемый способ позволяет с использованием текущих индивидуальных и групповых (окружающих участников движения) статистических данных определить на дороге водителя с агрессивным стилем.
Способ исходит из того, что контролю подлежит участок дороги, который можно определить, как однородный в комплексе всех значимых факторов:
- ширины;
- покрытия;
- количества полос движения;
- количества перекрестков, примыканий; - поворотов, подъемов, спусков;
- количества светофоров;
- времени суток.
В зависимости от этих факторов определяется пропускная способность данного участка, на котором будут двигаться транспортные средства (автомобили) с какой-то определенной плотностью потока. Качество управления каждым автомобилем будет характеризоваться его скоростью и количеством управляющих воздействий, которые произвел водитель, чтобы преодолеть этот участок. При помощи аппаратуры можно определить интенсивность управляющих воздействий  на этом участке у каждого водителя отдельно, при условии, что все автомобили оборудованы соответствующими средствами. Значение интенсивности управляющих воздействий в единицах событий в минуту (соб/мин). Передатчики способны передать пакетные файлы с каждого автомобиля на приемную станцию, а станция сможет произвести вычисления и определить усредненные параметры величины интенсивности управляющих воздействий, характерные для всего потока автомобилей, находящихся в данный момент времени на подконтрольном участке дороги. То есть, можно поставить и решить задачу для станции слежения на участке дороги - определять среднюю величину интенсивности управляющих воздействий всех участников движения (характерного для данного момента времени) - СредРупр (участка), (t).
на этом участке у каждого водителя отдельно, при условии, что все автомобили оборудованы соответствующими средствами. Значение интенсивности управляющих воздействий в единицах событий в минуту (соб/мин). Передатчики способны передать пакетные файлы с каждого автомобиля на приемную станцию, а станция сможет произвести вычисления и определить усредненные параметры величины интенсивности управляющих воздействий, характерные для всего потока автомобилей, находящихся в данный момент времени на подконтрольном участке дороги. То есть, можно поставить и решить задачу для станции слежения на участке дороги - определять среднюю величину интенсивности управляющих воздействий всех участников движения (характерного для данного момента времени) - СредРупр (участка), (t).
В случае ламинарного движения автомобилей, вероятность их столкновения будет приближаться к нулю, что можно принять за идеальный уровень безопасности.
Но если водитель стремится обогнать, а значит разгоняется, перестраивается и тормозит, то уровень интенсивности управляющих воздействий этого водителя будет превышать средний по потоку, что приведет к возрастанию вероятности ДТП с этим транспортным средством. Величина разности уровней интенсивности потоков управляющих воздействий - конкретного водителя и среднего по потоку - определит уровень небезопасного (агрессивного) вождения этого водителя, а также определит величину вероятности ДТП этого водителя с другим участником движения, едущим в потоке.
В соответствии с законом Парето, который устанавливает взаимосвязи социального взаимодействия, можно предположить, что водитель превысивший усредненное для участка дороги значение интенсивности потока управляющих воздействий на 20% создаст вероятность ДТП равную 80%.
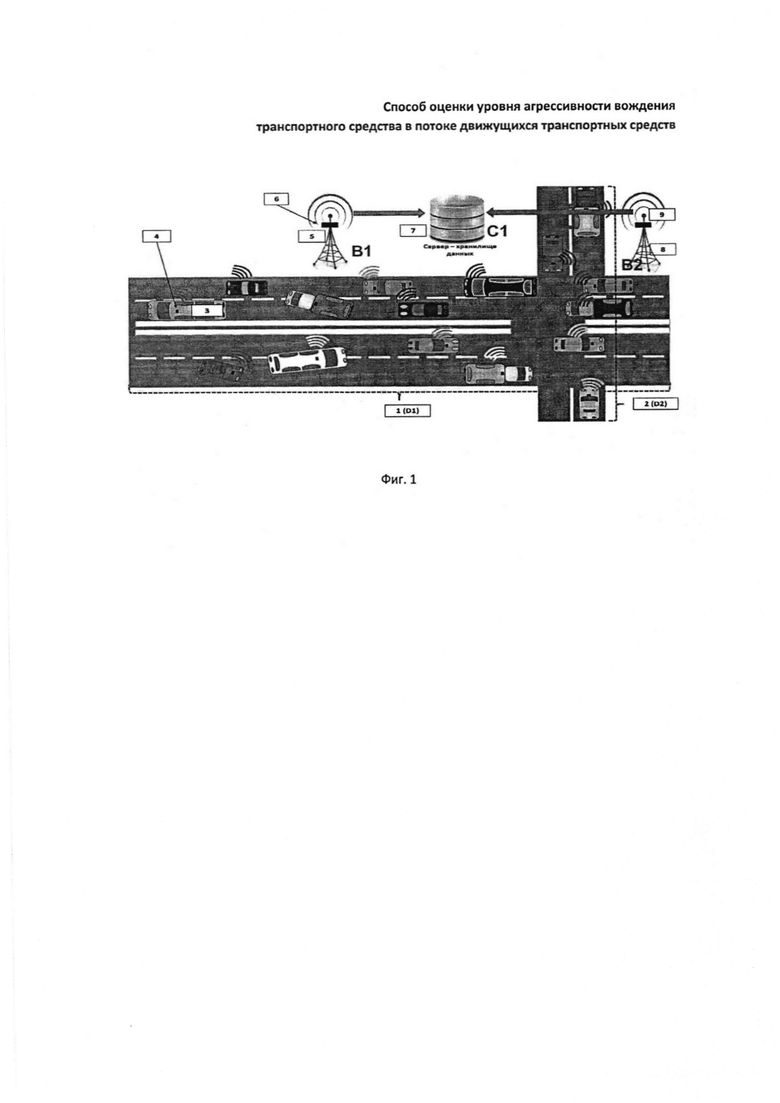
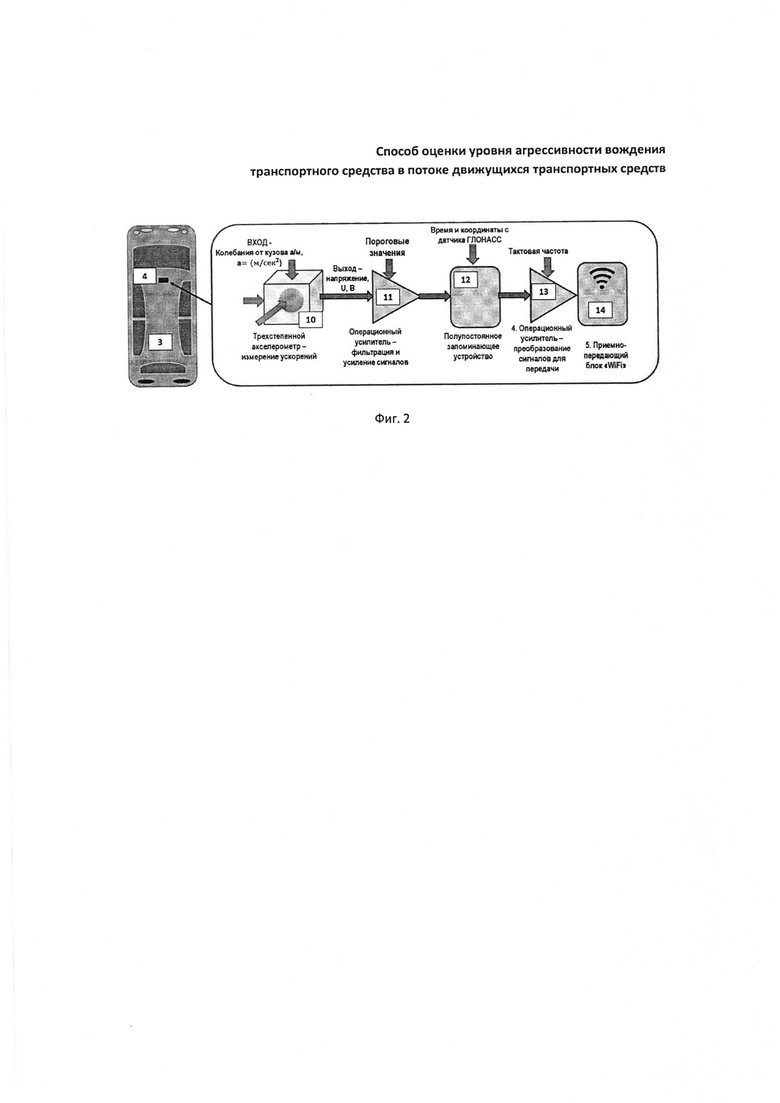
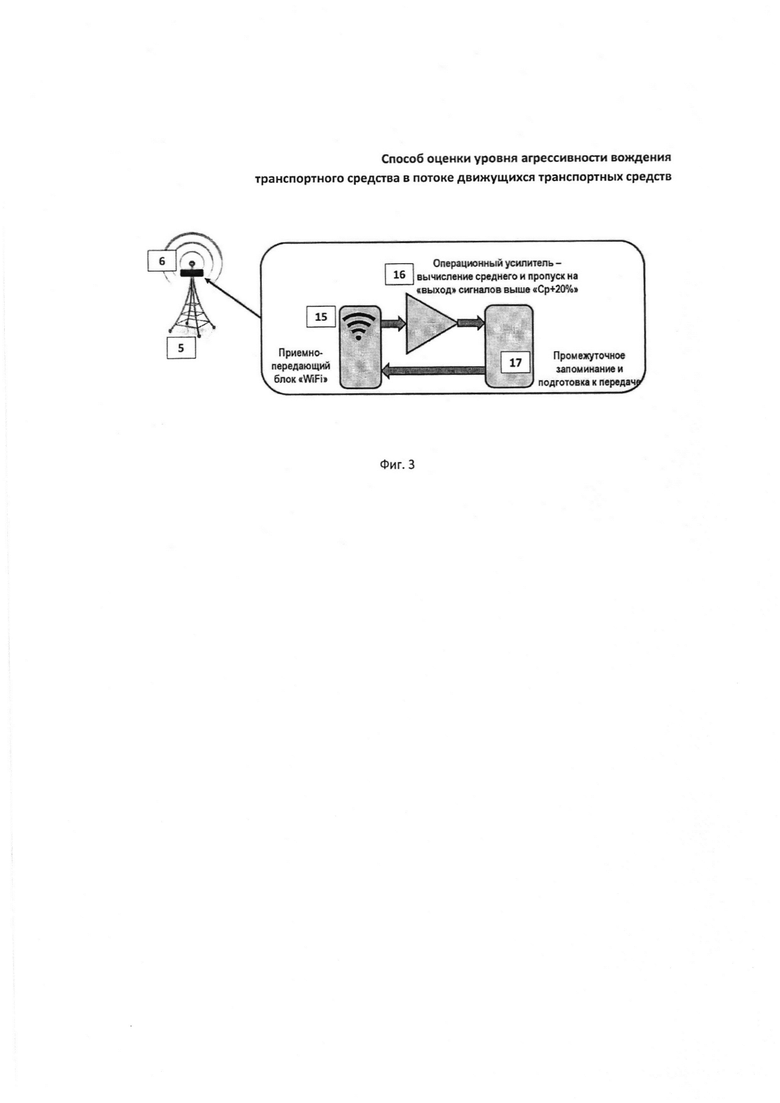
На чертеже фиг. 1 изображена схема расположения оборудования на контролируемом участке дорог, на фиг. 2 - принципиальная блок-схема оборудования прибора-регистратора на автомобиле, на фиг. 3 - принципиальная блок-схема оборудования блока-вычислителя на вышке.
На фиг. 1 обозначены: два перекрещивающихся участка 1,2 дорог D1 и D2, автомобиль (транспортное средство) 3, прибор-регистратор 4 ускорений, вышка 5, блок-вычислитель 6 вышки 5, сервер-хранилище 7 данных, вышка 8, блок-вычислитель 9 вышки 8.
На фиг. 2 обозначены: автомобиль 3, прибор-регистратор 4 ускорений, трехстепенной акселерометр 10, операционный усилитель 11, запоминающее устройство 12, операционный усилитель-преобразователь 13, приемо-передающий блок (приемник-передатчик) 14.
На фиг. 3 обозначены: вышка 5, блок-вычислитель 6 вышки 5, приемопередающий блок (приемник-передатчик) 15, операционный усилитель 16, промежуточное запоминающее устройство 17.
Способ оценки уровня небезопасного (агрессивного) вождения транспортного средства в потоке движущихся транспортных средств реализуется следующим образом.
На фиг. 1 изображены два перекрещивающихся участка 1, 2 дорог D1 и D2, каждый из которых имеет свою пропускную способность, ограниченную качеством покрытия, количеством полос движения, шириной полос движения, и другими влияющими факторами.
Каждый автомобиль (транспортное средство) 3 - участник движения оборудован прибором-регистратором ускорений 4 (фиг. 2). Назначение пробора регистратора - вычисление значения интенсивности управляющих воздействий с заданной периодичностью, например, 20 секунд, значение Рув а/м характеризует уровень агрессивности водителя в данном временном промежутке (согласно логике, изложенной выше). Измерительный элемент прибора регистратора - трехстепенной акселерометр 10, преобразует механическую деформацию измеряющего элемента, которая возникает в результате перегрузки (ускорения) в электрический сигнал. Операционный усилитель 11 - отфильтровывает шумы и усиливает сигнал, формирует поле данных, где событию (факту ускорения) присваиваются идентификационные данные - время и координаты события. Запоминающее устройство 12 - запоминает поле данных и хранит его до момента передачи. Операционный усилитель-преобразователь 13 осуществляет выборку данных, их подготовку к передаче и отправляет на приемно-передающий блок 14.
Вышки 5, 8, (В1 и В2) для каждого участка 1, 2 дороги установлены и охватывают какую-то зону видимости в каждую сторону. На вышках 5, 8 соответственно установлены блоки-вычислители 6, 9 (фиг. 3). Блоки вычислители 6, 9 имеют возможность передавать и принимать сигналы, обрабатывать информацию. Организован канал связи с сервером 7 для хранения данных.
Когда автомобиль 3 въезжает на участок 1 или 2 дороги (D1 или D2) - прибор-регистратор 4, установленный на автомобиле 3, периодически получает сигнал через приемно-передающий блок 14 (например, через каждые 10 секунд) запроса данных от блока-вычислителя 6 (9), расположенного на вышке 5 (8). В ответ прибор-регистратор 4 посылает сообщение с идентификационными данными автомобиля 3, координатами и временем, а также с последним определенным значением 
 интенсивности управляющих воздействий, который постоянно вычисляет и обновляет прибор-регистратор 4 путем обработки результатов измерения параметра ускорения движения, зафиксированного с помощью трехстепенного акселерометра 10, и измеряемого в м/с2.
интенсивности управляющих воздействий, который постоянно вычисляет и обновляет прибор-регистратор 4 путем обработки результатов измерения параметра ускорения движения, зафиксированного с помощью трехстепенного акселерометра 10, и измеряемого в м/с2.
За все время проезда по участку дороги 1 (2) прибор-регистратор 4 n-е количество раз будет опрошен блоком-вычислителем 6 и отошлет сообщение с актуальным значением  .
.
Блок-вычислитель 6 (9), находящийся на вышке 5 (8) принимает сигналы от всех приборов регистраторов автомобилей, находящихся на контролируемом участке дороги через приемо-передающий блок 15 и в операционном усилителе 16 вычисляет усредненное значение интенсивности  за временной период между предыдущим и индивидуальными сообщениями, которое в данный момент времени генерируют автомобили - участники движения на данном участке дороги 1 (или 2). Блок-вычислитель 6 в операционном усилителе 16 для каждого значения
за временной период между предыдущим и индивидуальными сообщениями, которое в данный момент времени генерируют автомобили - участники движения на данном участке дороги 1 (или 2). Блок-вычислитель 6 в операционном усилителе 16 для каждого значения  то есть автомобиля, также производит операцию сравнения значения с пороговым значением (например, 20% - коэффициент = 1,2) по соотношениям:
то есть автомобиля, также производит операцию сравнения значения с пороговым значением (например, 20% - коэффициент = 1,2) по соотношениям:
если «БОЛЬШЕ» (неравенство выполняется), ТО - «ЗАПОМНИТЬ»,
то есть, при выявлении превышения первой сравниваемой величины  над второй
над второй  на величину порога (20%) и более, делается вывод о выявлении агрессивного, т.е. небезопасного, вождения соответствующего автомобиля 3.
на величину порога (20%) и более, делается вывод о выявлении агрессивного, т.е. небезопасного, вождения соответствующего автомобиля 3.
В этом случае операционный усилитель 16 передает данные автомобиля, который превысил пороговую величину в промежуточное запоминающее устройство 17, где производится запоминание значений  времени, координат и идентификационных данных автомобиля 3. Далее приемо-передающий блок 15 передает эти данные на сервер 7 для хранения.
времени, координат и идентификационных данных автомобиля 3. Далее приемо-передающий блок 15 передает эти данные на сервер 7 для хранения.
При этом на сервере 7 будут сохранены данные о времени и месте событий тех автомобилей, которые превысили средний уровень интенсивности управляющих воздействий на участке дороги на пороговую величину (20%). В соответствии с критерием Парето эти автомобили в этот момент времени превысили вероятность попадания в ДТП более чем на 80%. Далее возможна дальнейшая обработка данных в интересах заказчиков информации, например, правоохранительных органов или страховых компаний.
Таким образом, реализация данного способа при оборудовании автомобили приборами-регистраторами, и оборудовав участки дорог вышками и приемными-вычислительными (станциями), вычисляя интенсивности управленческих воздействий водителей, выделяя водителей, которые превышают усредненное значение интенсивности управляющих воздействий потока автомобилей, можно решить задачу объективного определения потенциально опасных водителей с высокой степенью объективности.
Изобретение относится к области контроля и регистрации работы транспортных средств. Способ оценки уровня небезопасного вождения транспортного средства в потоке, содержащий этапы, на которых опрашивают периодически формируемым сигналом запроса данных транспортные средства со стационарного источника. Принимают сигнал на транспортных средствах приборами-регистраторами, которые передают ответные сообщения, определенные в результате измерений и вычислений, на стационарный источник. По результатам собранной информации от транспортных средств вычисляют среднее значение интенсивности управляющих воздействий за временной период для данного контролируемого участка дороги и уровень превышения интенсивности управляющих воздействий конкретного транспортного средства над средним уровнем интенсивности потока транспортных средств для данного участка в данный момент, который определяет уровень небезопасного вождения этого конкретного водителя. Обеспечивается своевременное и точное определения небезопасного вождения. 1 н. и 5 з.п. ф-лы, 3 ил.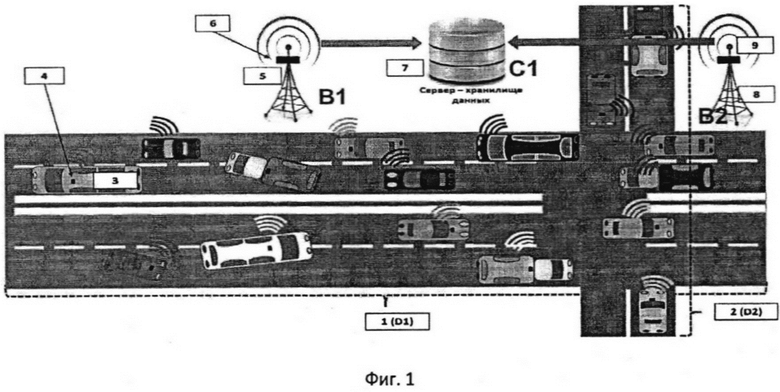
1. Способ оценки уровня небезопасного вождения транспортного средства в потоке движущихся транспортных средств, при котором при въезде на контролируемый участок дороги автомобили опрашиваются со стационарного источника периодически формируемым сигналом запроса данных, который принимают установленные на транспортных средствах приборы-регистраторы, с функцией приема и передачи данных, которые предают ответные сообщения определенных в результате измерений и вычислений, идентифицируемых как изменение параметра ускорения, значение интенсивности управляющих воздействий Рув а/м (водителей) каждого транспортного средства с идентификационными данными каждого транспортного средства, координатами и временем события, причем актуальное значение периодически, за временной период между предыдущим и текущим сообщениями, вычисляется и обновляется, а по результатам собранной информации от автомобилей вычисляется среднее значение интенсивности управляющих воздействий за временной период между предыдущим и текущим сообщениями для данного контролируемого участка дороги и уровень превышения интенсивности управляющих воздействий конкретного автомобиля над средним уровнем интенсивности потока автомобилей для данного участка в данный момент, который определит уровень небезопасного вождения этого конкретного водителя.
2. Способ по п. 1, отличающийся тем, что интенсивность управляющих воздействий водителя определяется как изменение параметра ускорения движения, зафиксированное с помощью трехстепенного акселерометра.
3. Способ по любому из пп. 1, 2, отличающийся тем, что делается вывод о возникновении повышения вероятности возникновения ДТП на 80% для водителя транспортного средства, который в конкретный момент времени воспроизвел интенсивность управляющих воздействий, на 20% превышающую существующее усредненное значение интенсивности управляющих воздействий потока транспортных средств на дороге - в соответствии с законом Парето.
4. Способ по любому из пп. 1, 2, отличающийся тем, что усредненное значение интенсивности управляющих воздействий СрРув(t) вычисляют с помощью стационарного блока-вычислителя, находящегося на вышке, а данные о выявлении небезопасного вождения передаются на стационарный сервер, где происходит их хранение и дальнейшая обработка.
5. Способ по любому из пп. 1, 2, отличающийся тем, что операцию сравнения текущего значения интенсивности управляющих воздействий каждого транспортного средства с упомянутым усредненным значением интенсивности управляющих воздействий на этом участке дороги производят с помощью стационарного блока-вычислителя, находящегося на вышке в соответствии с соотношениями:
Рув a/м N1(t) > 1,2 × СрРув(t);
Рув a/м N2(t) > 1,2 × СрРув(t);
…
Рув a/м Nn(t) > 1,2 × СрРув(t)
6. Способ по любому из пп. 1,2, отличающийся тем, что данные, которые отфильтровал и запомнил блок-вычислитель, находящийся на вышке, подготавливаются и передаются на стационарный сервер, где происходит хранение и возможна дальнейшая обработка данных в интересах заказчиков информации.
| Полуавтомат для формования следа сапог | 1960 |
|
SU142916A1 |
| СПОСОБ, ИНФОРМАЦИОННАЯ СИСТЕМА И ПРИБОР ДЛЯ ИНФОРМИРОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА ОБ УСЛОВИЯХ ЗАПЛАНИРОВАННОГО ОБГОНА | 2011 |
|
RU2601500C2 |
| Способ получения пленки из полиэтилена и других пластиков | 1956 |
|
SU106589A1 |

