Изобретение относится к области машиностроения, предназначено для преобразования электрической энергии в энергию поступательного движения и может быть использовано в летательных аппаратах, робототехнике и других областях техники.
Известен электромеханический мини-привод поступательного действия, патент RU №2526366, МПК F16H 25/22, опубликован 20.08.2014 г. Конструкция привода содержит электродвигатель, промежуточную передачу и шариковинтовую передачу, включающую винт и сепаратор с телами качения, размещенный в корпусе с внутренней цилиндрической поверхностью, при этом сепаратор с телами качения является входным звеном, а винт выходным.
Достоинствами этого привода являются простота конструкции из-за отсутствия внутреннего винтового профиля и исключение возможности заклинивания, т.к. каждое тело качения находится в отдельном гнезде сепаратора.
Этот патент принят за прототип.
Недостатком прототипа являются невысокая нагрузочная способность и относительно большой момент инерции, т.к. входным звеном является сепаратор с телами качения, а выходным звеном винт, расположенный внутри сепаратора.
Целью предполагаемого изобретения является повышение нагрузочной способности привода при упрощении и удешевлении конструкции.
Заявленный технический результат достигается тем, что электромеханический привод поступательного действия, содержащий электродвигатель, редуктор с промежуточными передачами и винтовую передачу с винтом и сепаратором с телами качения, дополнительно использующий в качестве входного звена вращающийся винт, а выходным звеном является гайка, выполненная в форме поршня, состоящего из сепаратора с гнездами, в которых размещены тела качения, и корпуса с гладкой цилиндрической внутренней поверхностью, сепаратор и корпус расположены коаксиально и жестко соединены между собой по торцам сепаратора так, что тела качения, в процессе работы привода, постоянно контактируют с поверхностью профиля винта, внутренней поверхностью профиля гайки и поверхностями гнезд сепаратора, расположенных по винтовой линии с шагом, равным шагу винта, при этом в качестве тел качения используются шарики или ролики, выполненные с коническими торцевыми поверхностями и сферическими вершинами, причем конусность продольного профиля ролика соответствует конусности продольного профиля винтовой линии винта.
Техническая сущность изобретения поясняется чертежами, на которых представлены:
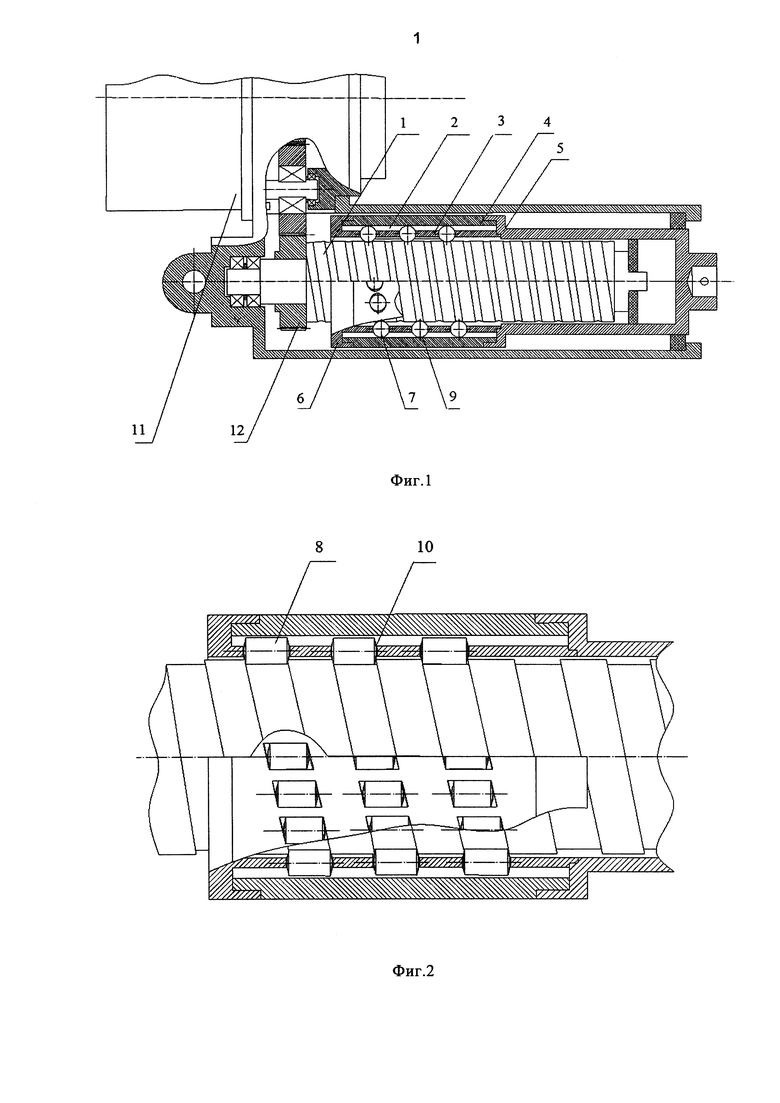
На фиг. 1 - продольный разрез электромеханического привода, содержащего винтовую передачу с сепаратором, в гнездах которого размещены шарики.
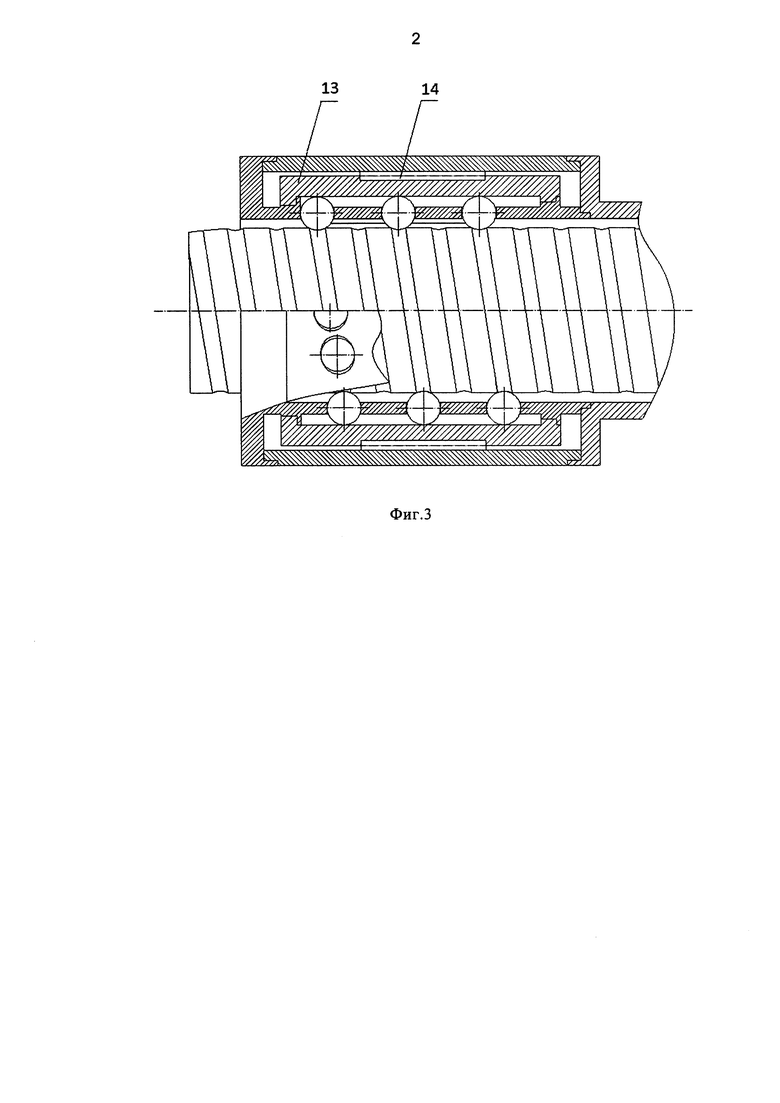
На фиг. 2 - продольный разрез участка электромеханического привода, содержащего винтовую передачу с сепаратором, в гнездах которого размещены ролики.
На фиг. 3 - фрагмент продольного разреза гайки, содержащей промежуточное звено - вращающуюся втулку.
Электромеханический привод содержит винт 1 и гайку 2, которая выполнена составной, включающей в себя сепаратор 3, размещенный в корпусе 4. Сепаратор 3 и корпус 4 расположены коаксиально и жестко соединены между собой донышками 5 и 6 по торцам сепаратора 3. В гнездах сепаратора 3 размещены тела качения шарики 7 или ролики 8. Гнезда сепаратора 3 расположены по винтовой линии с шагом равным шагу винта. Гнезда сепаратора 3 под шарики 7 имеют цилиндрическую форму, а гнезда под ролики 8 форму параллелепипедов, располагающихся вдоль продольной оси винта с равным шагом и по винтовой линии на одинаковом расстоянии друг от друга. Корпус 4 гайки 2 выполняет функцию поршня аналогично как в гидравлическом цилиндре. Внутренняя часть корпуса 4 выполнена в виде гладкой цилиндрической поверхности 9, с которой контактируют тела качения шарики 7 или ролики 8. Ролики 8 выполнены с коническими торцевыми поверхностями 10. Угол конической поверхности ролика 8 соответствует углу наклона винтовой линии винта. Винт 1 передачи соединен через промежуточную передачу 12 с электродвигателем 11. Корпус 4 гайки 2 может содержать промежуточное звено - вращающуюся втулку 13 роликами 14, расположенными между внутренней цилиндрической поверхностью корпуса 4 и наружной поверхностью втулки 13.
Электромеханический привод поступательного действия работает следующим образом.
При наличии крутящего момента на электродвигателе 11 и промежуточной передаче 12, винтовой профиль винта 1, контактирующий с телами качения, передает усилие через тела качения на сепаратор 3 и корпус 4. Усилие, передаваемое на сепаратор 3, вызывает сложное движение сепаратора: вращательное и поступательное. При наличии цапфы на конце гайки 2 (на чертежах не показано), ограничивающей вращательное движение, гайка 2 будет совершать только поступательное движение. Усилие, передаваемое телами качения 7 или 8 на корпус 4, вызывает вращательное движение тел качения 7 или 8 относительно корпуса 4 и в гнездах сепаратора 3. В передаче с роликами 8, последние контактируют с сепаратором 3 по образующей конической поверхности. При наличии промежуточной втулки 13 с роликами 14, усилие, передаваемое телами качения винтовой передачи, приводит втулку во вращение относительно ее продольной оси, которое выравнивает скорости тел качения винтовой передачи и сокращает трение скольжения.
Таким образом, в качестве выходного звена электромеханического привода использована гайка винтовой передачи, расположенная снаружи винта и состоящая из коаксиально расположенных корпуса, выполняющего функцию поршня, и сепаратора с телами качения, которые контактируют с гладкой внутренней цилиндрической поверхностью корпуса. Такая конструкция привода обеспечивает: малый момент инерции, так как входящим звеном является вращающийся винт, расположенный внутри сепаратора; а также высокую нагрузочную способность, которая дополнительно увеличивается при использовании в качестве тел качения -роликов определенной формы.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНСТРУКЦИЯ ПРИВОДА | 2021 |
|
RU2766637C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении | 2015 |
|
RU2611471C2 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| АДАПТАЦИОННЫЙ ШАРИКОВИНТОВОЙ ПРИВОД ВАСИЛЬЕВА | 2003 |
|
RU2238456C1 |
| Винтовая пара и планетарная передача на её основе | 2020 |
|
RU2752356C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ВИНТОВОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1993 |
|
RU2082048C1 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
Изобретение относится к области машиностроения, а более конкретно к преобразованию вращательного движения в поступательное. Электромеханический привод поступательного действия содержит винт и гайку. Гайка состоит из сепаратора, в гнездах которого расположены тела качения, и корпуса с гладкой внутренней цилиндрической поверхностью. Сепаратор и корпус расположены коаксиально и жестко соединены между собой по торцам сепаратора донышками. Тела качения постоянно контактируют с поверхностями профиля винта, корпуса гайки и гнездами сепаратора, при этом гнезда сепаратора расположены по винтовой линии с шагом, равным шагу винта. В качестве тел качения могут применяться как шарики, так и ролики, выполненные с коническими торцевыми поверхностями и сферической вершиной, угол конуса которых соответствует углу наклона винтовой линии винта. Достигается увеличение нагрузочной способности. 3 ил.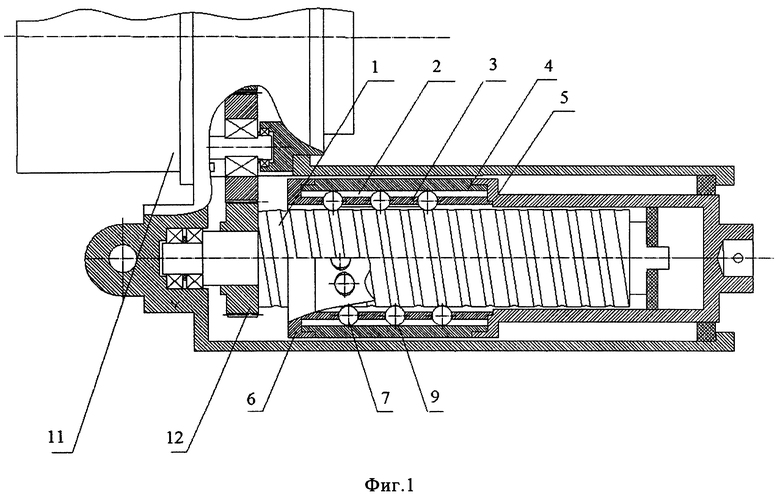
Электромеханический привод поступательного действия, содержащий электродвигатель, редуктор с промежуточной передачей и винтовую передачу с винтом и сепаратором с телами качения, отличающийся тем, что входным звеном винтовой передачи является вращающийся винт, а выходным звеном - гайка, выполненная в форме поршня, состоящего из сепаратора с гнездами, в которых размещены тела качения, и корпуса с гладкой цилиндрической внутренней поверхностью, сепаратор и корпус расположены коаксиально и жестко соединены между собой по торцам сепаратора так, что тела качения, в процессе работы привода, постоянно контактируют с поверхностью профиля винта, внутренней поверхностью профиля гайки и поверхностями гнезд сепаратора, расположенных по винтовой линии с шагом, равным шагу винта, при этом в качестве тел качения используются шарики или ролики, выполненные с коническими торцевыми поверхностями и сферическими вершинами, причем конусность продольного профиля ролика соответствует конусности продольного профиля винтовой линии винта.
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| Шариковинтовой механизм | 1987 |
|
SU1516683A1 |
| ВИНТОВАЯ ПАРА С ТРЕНИЕМ КАЧЕНИЯ | 0 |
|
SU202672A1 |
| Шарикоподшипниковый винтовой механизм | 1986 |
|
SU1357637A1 |
| Скребковый двухцепной конвейер | 1952 |
|
SU99091A1 |
| US 2966071 A1, 27.12.1960 | |||
| US 4920817 A1, 01.05.1990 | |||
| US 4229983 A1, 28.10.1980. | |||

