Изобретение относится к области контрольного испытательного оборудования и предназначено для применения в испытаниях на ударное воздействие.
В ряде испытательных работ, связанных с метанием ударников, характеризующихся наличием плоской поверхности и движущихся плоскопараллельно в направлении нормали к этой поверхности, требуется определить скорость ударников и их пространственное положение на момент испытаний. Для определения положения поверхности такого рода ударника достаточно зарегистрировать угол между его поверхностью и характерной плоскостью (или осью), положение которой в пространстве заранее известно.
Из описания патента РФ №2250434 «Способ непрерывной регистрации положения, профиля и скорости движущейся поверхности» (МПК G01B 7/00, G01P 3/66, G01H 5/00, опубл. 20.04.2005) известно выбранное в качестве прототипа устройство регистрации скорости и положения в пространстве движущейся поверхности ударника, содержащее, по крайней мере, два электроконтактных датчика резистивного типа коаксиальной конструкции, установленных на общей платформе. Чувствительные элементы датчиков устанавливают на заданном расстоянии от платформы и друг от друга * вплотную и перпендикулярно исследуемой движущейся поверхности. Каждый датчик представляет собой центральную жилку из нихрома в лаковой изоляции, помещенную в защитную трубку из никелевого сплава. Один из концов (торец) датчика имеет тонкий слой лаковой изоляции, другой конец закрепляется неподвижно и подключается к измерительным трактам. При воздействии движущейся поверхности на резистивные датчики в каждом из них на торце нарушается слой лаковой изоляции, что приводит к контакту центральной жилки с защитной трубкой и включению измерительных трактов. При взаимодействии с движущейся поверхностью резистивные датчики уменьшают свою длину и электрическое сопротивление, создают информационные сигналы, которые регистрируют и по откалиброванным зависимостям определяют положение и скорость движущейся поверхности ударника.
Недостатками прототипа являются:
- указанная авторами в описании патента малая инерционность датчиков, что для решаемой ими задачи является положительным моментом, но требует установки датчиков вплотную к начальному положению исследуемой поверхности ударника. При изменении положения поверхности ударника в процессе разгона (например, его повороте при несимметричном воздействии продуктов детонации взрывчатого вещества) и его движении в какой-нибудь среде (например, воздухе), применяемые датчики, вследствие малой удельной массы (внешний диаметр 0,3 мм, диаметр центральной нихромовой нити 0,05 мм), будут смещены ударной волной сжатой среды, распространяющейся перед движущейся в высокоскоростном режиме (0,8-8 км/с) поверхностью. Это не позволит определить требуемые параметры;
- несоответствие скорости исследуемой поверхности регистрируемой скорости взаимодействия с датчиком при неперпендикулярном его расположении относительно поверхности ударника. Это ужесточает требования к точности установки датчиков и ограничивает их область применения;
- требуемый для определения параметров движущейся поверхности постоянный и длительный контакт чувствительного элемента резистивного датчика с ударником. При перпендикулярном воздействии поверхности ударника на датчик, строго говоря, регистрируется не перемещение поверхности ударника, а перемещение зоны контакта чувствительного элемента и материала ударника. При повышении жесткости конструкции датчика (или применении относительно мягкого материала ударника) увеличится и погрешность измерения скорости взаимодействия вследствие проникания датчика в материал ударника с образованием каверны.
Техническая проблема, на решение которой направлено заявляемое устройство заключается в создании устройства, обеспечивающего получение информации о фактическом положения движущейся плоской поверхности в пространстве и ее скорости в направлении нормали к плоской поверхности.
Технический результат, получаемый при использовании устройства, состоит, во-первых, в определении величины угла между движущейся плоской поверхностью и плоскостью общей платформы установки электроконтактов, положение которой в пространстве известно, во-вторых, в определении скорости движущейся плоской поверхности ударника в направлении нормали к ней.
Технический результат достигается тем, что устройство для определения положения в пространстве и скорости движущейся плоской поверхности, содержащее группу установленных на общей платформе электрических контактных датчиков, чувствительные элементы которых установлены на заданном расстоянии от платформы и друг от друга с возможностью замыкания под воздействием движущейся плоской поверхности ответных контактов, установленных перпендикулярно общей платформе, в отличие от прототипа содержит, по крайней мере, две группы электрических контактных датчиков реакционного типа, установленных на общей платформе, чувствительные элементы в каждой группе датчиков установлены вдоль прямых, перекрещивающихся в параллельных плоскостях, ориентированных перпендикулярно движущейся плоской поверхности.
Использование, по крайней мере, двух групп электрических контактных датчиков реакционного типа, установленных на общей платформе, в которых в каждой труппе датчиков чувствительные элементы размещены вдоль прямых, перекрещивающихся в параллельных плоскостях, ориентированных перпендикулярно движущейся плоской поверхности, обеспечивает надежное и достоверное получение информации о фактическом положении плоской поверхности ударника в пространстве и его скорости в направлении нормали к плоской поверхности, в том числе и при изменении положения поверхности ударника в процессе разгона (например, при ее повороте в результате несимметричного воздействии продуктов детонации взрывчатого вещества) и движении ударника в какой-нибудь среде (например, воздухе).
Использование заявляемого устройства снижает требование к точности установки датчиков, поскольку достаточно до испытания зарегистрировать фактическое положение общей платформы устройства в пространстве, что расширяет область применения устройства.
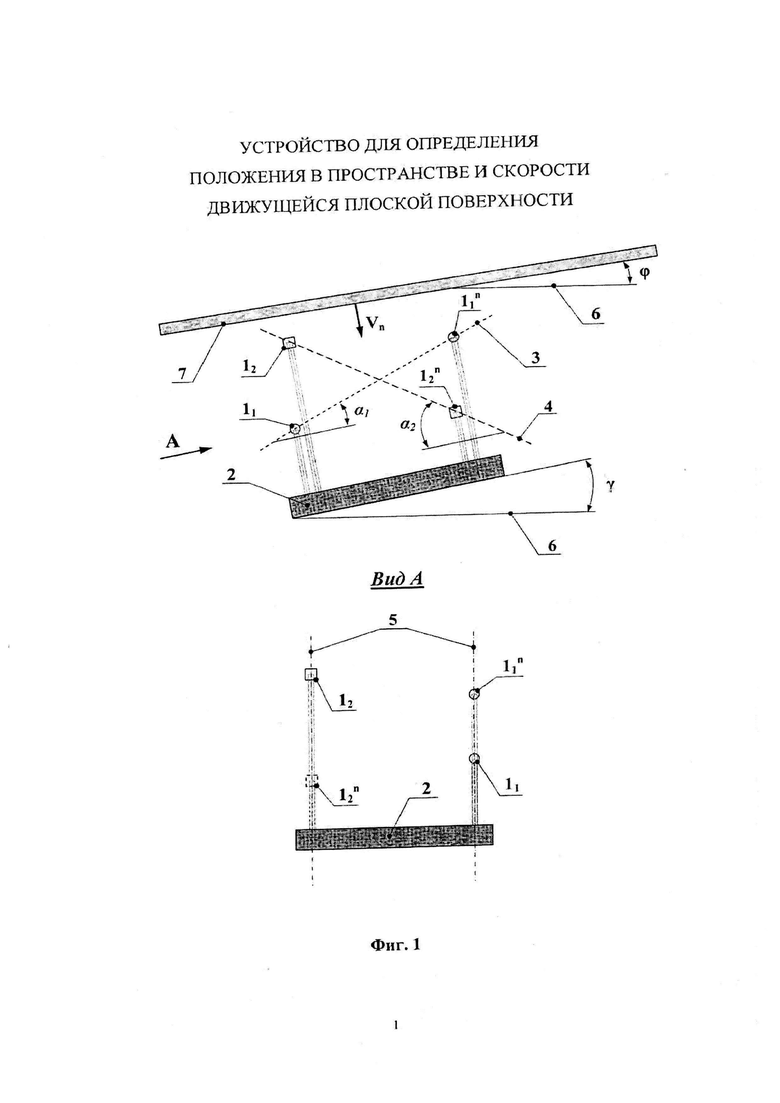
Изобретение поясняется фиг. 1, на которой в двух проекциях схематично показан принцип расстановки чувствительных элементов электрических контактных датчиков реакционного типа устройства для определения положения в пространстве и скорости движущейся плоской поверхности.
Заявляемое устройство содержит: 11, 11n - чувствительные элементы первой группы электрических контактных датчиков реакционного типа; 12, 12n - чувствительные элементы второй группы электрических контактных датчиков реакционного типа; 2 - общая платформа размещения указанных датчиков (платформа устройства). Чувствительные элементы электрических контактных датчиков установлены на заданном расстоянии от платформы 2 и друг от друга.
На фиг. 1 обозначено: 3 - прямая, вдоль которой установлены чувствительные элементы первой группы датчиков; 4 - прямая, вдоль которой установлены чувствительные элементы второй группы датчиков; α1 - угол наклона к платформе 2 прямой 3; α2 - угол наклона к платформе 2 прямой 4; 5 - ориентированные перпендикулярно движущейся плоской поверхности и параллельные между собой плоскости, которым принадлежат прямые 3 и 4; 6 - горизонталь; 7- движущаяся плоская поверхность ударника (на фиг. 1 показано положение перед началом взаимодействия с чувствительными элементами электрических контактных датчиков реакционного типа); Vn - искомая скорость движения поверхности ударника 7 в направлении нормали к ней; ϕ - искомый угол между движущейся плоской поверхностью и горизонталью.
Каждый электрический контактный датчик реакционного типа может быть выполнен следующим образом: одним ответным контактом-электродом является токопроводящий штырь, изолированный от наружной оболочки, жестко соединенный с общей платформой 2, а другим контактом-чувствительным элементом является токопроводящий колпачок, размещенный относительно штыря с зазором, соединенный с токопроводящей наружной оболочкой, которая также как и штырь установлена перпендикулярно общей платформе устройства и жестко соединена с ней. При соударении с движущейся поверхностью ударника 7 чувствительный элемент (колпачок) деформируется на величину зазора, благодаря чему происходит замыкание контактов датчика и выдача электрического сигнала (см. п. РФ №2186334, №2219487, №2289784, №2399019).
Одним из необходимых начальных условий для использования результатов хронографической регистрации срабатывания датчиков устройства является наличие информации о положении его общей платформы в пространстве. Для пояснения примем, что положение плоскости платформы известно, например, относительно горизонтали. Определение угла между движущейся плоской поверхностью ударника и горизонталью производится путем сложения углов между движущейся плоской поверхностью ударника и общей платформой устройства и между указанной платформой и горизонталью.
Устройство работает следующим образом.
Движущаяся плоская поверхность ударника 7 взаимодействует с чувствительными элементами 1 электрических контактных датчиков реакционного типа, установленных вдоль прямых 3 и 4, перекрещивающихся в параллельных плоскостях, ориентированных перпендикулярно движущейся плоской поверхности. При замыкании каждым чувствительным элементом соответствующего ему ответного контакта происходит замыкание электрической цепи и регистрируется время момента замыкания контактов.
В дальнейшем, используя известное расстояние между чувствительными элементами в каждой группе датчиков (конструктивный параметр устройства) и зарегистрированные значения времени замыкания контактов, вычисляют скорости распространения замыкания контактов для каждой группы.
Из геометрических построений, при рассмотрении векторов скоростей распространения замыкания контактов в проекции, аналогичной представленной на фиг. 1, используя теорему косинусов, вычисляют искомые параметры ϕ и Vn.
Порядок вычислений следующий.
Первый шаг: определяют промежуточный параметр вычислений F:

где  - скорость распространения замыкания контактов первой группы датчиков (11-11n) при взаимодействии с движущейся плоской поверхностью ударника 7;
- скорость распространения замыкания контактов первой группы датчиков (11-11n) при взаимодействии с движущейся плоской поверхностью ударника 7;
 - скорость распространения замыкания контактов второй группы датчиков (12-12n) при взаимодействии с движущейся плоской поверхностью ударника 7;
- скорость распространения замыкания контактов второй группы датчиков (12-12n) при взаимодействии с движущейся плоской поверхностью ударника 7;
F - промежуточный параметр вычислений, характеризующий скорость распространения замыкания контактов обеих групп относительно друг друга в плоскости движущейся поверхности ударника 7.
Отсюда, используя ту же теорему косинусов, вторым шагом определяют величину угла β (является промежуточным параметром вычислений, не показан) между движущейся плоской поверхностью ударника 7 и платформой 2 устройства:
Фактическое положение в пространстве движущейся плоской поверхности ударника 7 определяют, вычисляя угол ее наклона относительно горизонтали. Для этого используется известный (зарегистрированный при установке до испытания) угол наклона платформы устройства к горизонтали γ.
ϕ=β+γ
И завершающим шагом определяют Vn - скорость движения ударника в направлении нормали к его плоской поверхности:
Vn=Vk1*sin(α1-β)=Vk2*sin(α2+β)
Достижение технического результата подтверждается данными экспериментальных исследований.
Таким образом, использование устройства обеспечивает получение информации о фактическом положении плоской поверхности ударника и его скорости.
Использование: для применения в испытаниях на ударное воздействие. Сущность изобретения заключается в том, что устройство для определения положения в пространстве и скорости движущейся плоской поверхности содержит группу установленных на общей платформе электрических контактных датчиков, чувствительные элементы которых установлены на заданном расстоянии от платформы и друг от друга с возможностью замыкания под воздействием движущейся плоской поверхности ответных контактов, установленных перпендикулярно общей платформе, две группы электрических контактных датчиков реакционного типа, установленных на общей платформе, чувствительные элементы в каждой группе датчиков установлены вдоль прямых, перекрещивающихся в параллельных плоскостях, ориентированных перпендикулярно движущейся плоской поверхности. Технический результат: обеспечение возможности получения информации о фактическом положении плоской поверхности ударника и скорости ее перемещения в направлении нормали к ней. 1 ил.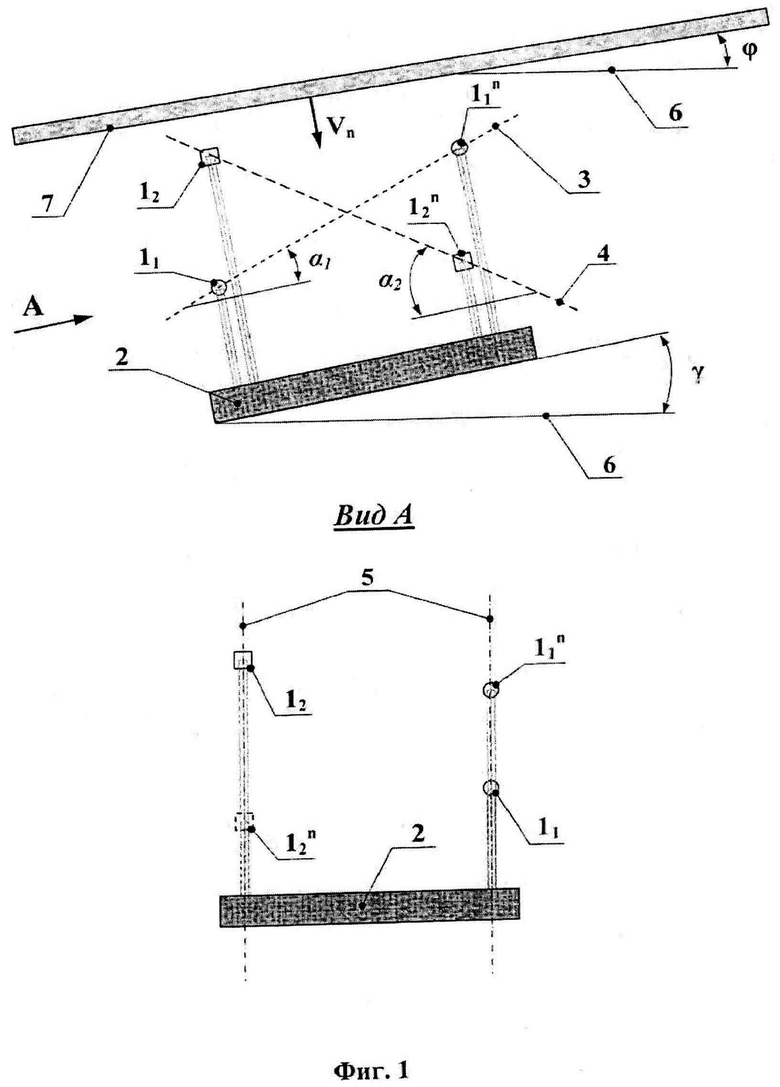
Устройство для определения положения в пространстве и скорости движущейся плоской поверхности, содержащее группу установленных на общей платформе электрических контактных датчиков, чувствительные элементы которых установлены на заданном расстоянии от платформы и друг от друга с возможностью замыкания под воздействием движущейся плоской поверхности ответных контактов, установленных перпендикулярно общей платформе, отличающееся тем, что содержит по крайней мере две группы электрических контактных датчиков реакционного типа, установленных на общей платформе, чувствительные элементы в каждой группе датчиков установлены вдоль прямых, перекрещивающихся в параллельных плоскостях, ориентированных перпендикулярно движущейся плоской поверхности.
| СПОСОБ НЕПРЕРЫВНОЙ РЕГИСТРАЦИИ ПОЛОЖЕНИЯ, ПРОФИЛЯ И СКОРОСТИ ДВИЖУЩЕЙСЯ ПОВЕРХНОСТИ | 2003 |
|
RU2250434C1 |
| SU 1334879 A1, 27.08.1999 | |||
| Механические кильблоки | 1928 |
|
SU15830A1 |
| US 4959807 A, 25.09.1990 | |||
| JP 61292024 A, 22.12.1986. | |||

