Изобретение относится к области контрольного испытательного оборудования и предназначено для применения в испытаниях на ударное воздействие.
В ряде испытательных работ, связанных с метанием ударников, характеризующихся наличием плоской поверхности и движущихся плоскопараллельно в направлении нормали к этой поверхности, требуется определить скорость движения ударников и их пространственное положение на момент испытаний. Для определения положения поверхности такого рода ударника достаточно зарегистрировать угол между его поверхностью и характерной плоскостью или осью (угол подхода), положение которой в пространстве заранее известно.
Известен принятый за прототип способ [Б.М. Ловягин, А.Г. Иванов, В.И. Дудоладов, В.Д. Макаров «Способ непрерывной регистрации положения, профиля и скорости движущейся поверхности», патент РФ № RU 2250434, МПК 7 G01B 7/00, G01P 3/66, G01H 5/00, приоритет от 04.08.2003, опубликован 20.04.2005], заключающийся в регистрации электрического сигнала с, по крайней мере, двух резистивных коаксиальных датчиков, установленных концами вплотную и перпендикулярно исследуемой поверхности. Другие концы датчиков закрепляют неподвижно и подключают к измерительным трактам без образования тока в датчиках. Осуществляют высокоскоростное воздействие движущейся поверхности на резистивные датчики. Используя информационные сигналы с измерительных трактов и калибровочные зависимости, строят графики перемещения отдельных движущихся частей исследуемой поверхности во времени. Способ позволяет регистрировать одновременно положение, профиль и скорость движущейся твердой поверхности.
Недостатками этого способа являются:
- указанная авторами в описании патента малая инерционность датчиков, что для решаемой ими задачи является положительным моментом, но требует установки датчиков вплотную к начальному положению исследуемой поверхности ударника. При изменении положения поверхности ударника в процессе разгона (например, его повороте при несимметричном воздействии продуктов детонации взрывчатого вещества) и его движении в какой-нибудь среде (например, воздухе), применяемые датчики, вследствие малой удельной массы (внешний диаметр 0,3 мм, диаметр центральной нихромовой нити 0,05 мм), будут смещены ударной волной сжатой среды, распространяющейся перед движущейся в высокоскоростном режиме (0,8-8 км/с) поверхностью. Это не позволит определить требуемые параметры;
- несоответствие скорости исследуемой поверхности регистрируемой скорости взаимодействия с датчиком при неперпендикулярном его расположении относительно поверхности ударника. Это ужесточает требования к установке датчиков и ограничивает область применения способа;
- требуемый для реализации способа постоянный и длительный контакт чувствительного элемента (ЧЭ) резистивного датчика с движущейся поверхностью. При перпендикулярном воздействии поверхности ударника на датчик, строго говоря, регистрируется не перемещение поверхности ударника, а перемещение зоны контакта чувствительного элемента и материала ударника. При повышении жесткости конструкции датчика (или применении относительно мягкого материала ударника) увеличится и погрешность измерения скорости взаимодействия вследствие проникания датчика в материал ударника с образованием каверны.
Решаемая задача заключается в создании способа определения относительного положения поверхности плоского ударника и ее скорости.
Технический результат, получаемый при реализации заявляемого способа, состоит, во-первых, в определении относительного положения поверхности плоского ударника, величины угла между поверхностью ударника и плоскостью (или осью), имеющей привязку положения в пространстве, и, во-вторых, в определении скорости ударника в направлении нормали к его плоской поверхности, расширении диапазона условий применения.
Это достигается тем, что в заявляемом способе определения положения и скорости плоской поверхности ударника, заключающемся в том, что при перемещении ударника в направлении нормали к его плоской поверхности в, по крайней мере, одной плоскости, перпендикулярной указанной поверхности ударника, вдоль не менее двух прямых размещают чувствительные элементы регистрирующих устройств, регистрируют контакт чувствительных элементов с поверхностью ударника, определяют пространственное положение контакта и скорость его перемещения, в отличие от прототипа чувствительные элементы размещают вдоль прямых, пересекающихся в одной плоскости или перекрещивающихся в двух и более параллельных друг другу плоскостях, а положение и скорость движущейся поверхности плоского ударника определяют путем геометрических построений и расчетов с использованием зарегистрированных значений.
Использование всей совокупности признаков заявляемого способа позволяет обеспечить достижение технического результата.
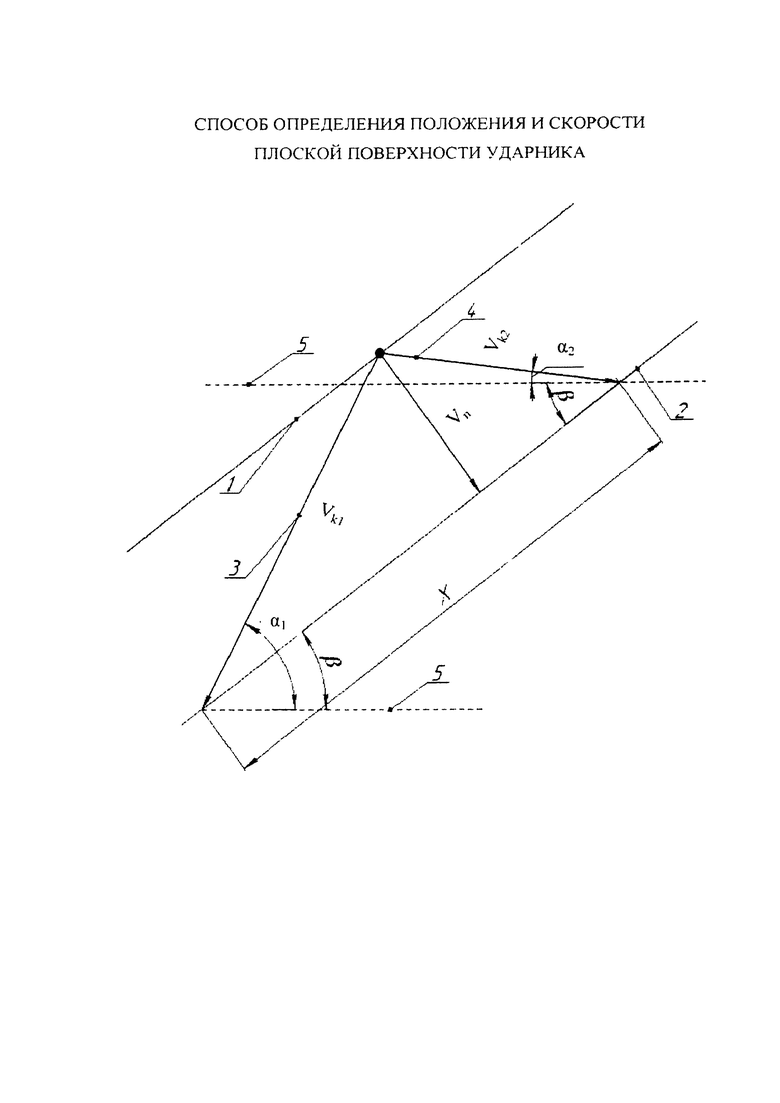
Изобретение поясняется фигурой.
На фигуре схематично показано осуществление способа для случая нахождения ЧЭ вдоль прямых, расположенных в разных и параллельных между собой плоскостях, каждая из которых перпендикулярна поверхности ударника.
Схема представляет собой ортогональную проекцию этих прямых на плоскость, параллельную указанным плоскостям. На этой проекции плоскость, соответствующая положению поверхности ударника, отображается прямой линией. Представленная схема полностью соответствует и частному случаю расположения ЧЭ вдоль прямых, расположенных в одной плоскости.
В качестве ЧЭ могут быть использованы чувствительные элементы как имеющие непрерывный контакт с поверхностью ударника (например, проволока и т.п.), так и дискретно подтверждающие контакт с поверхностью ударника (например, группа электроконтактных датчиков, чувствительные элементы которых выставленных вдоль прямых линий).
Одним из необходимых начальных условий для осуществления способа является информация о положении в пространстве чувствительных элементов, выстроенных вдоль прямых. Для пояснения примем, что положение этих прямых известно, например, относительно горизонтали (известен угол наклона прямых к горизонту).
Рассмотрим определение положения движущейся поверхности ударника относительно горизонтали. Для этого достаточно определить величину угла подхода поверхности ударника к горизонтали. На фигуре обозначено: 1 - положение поверхности ударника на начало взаимодействия с чувствительными элементами, расположенными вдоль прямых; 2 - положение поверхности ударника при окончании взаимодействия с чувствительными элементами, расположенными вдоль прямых; 3 - первая из прямых, вдоль которой расположены чувствительные элементы (ЧЭ1); 4 - вторая из прямых, вдоль которой расположены чувствительные элементы (ЧЭ2); 5 - горизонталь; α1 - угол наклона к горизонтали прямой 3; α2 - угол наклона к горизонтали прямой 4; Vк1 - вектор скорости перемещения контакта поверхности ударника с ЧЭ1, расположенными вдоль прямой 3; Vк2 - вектор скорости перемещения контакта поверхности ударника с ЧЭ2, расположенными вдоль прямой 4; X - необходимый промежуточный параметр вычислений, характеризующий скорость удаления друг от друга точек взаимодействия поверхности ударника с ЧЭ1 и ЧЭ2; Vn - искомая скорость движения ударника в направлении нормали к его плоской поверхности; β - искомый угол подхода ударника относительно горизонтали.
Способ осуществляется следующим образом.
Ударник, перемещаясь плоскопараллельно с постоянной скоростью в пространстве из позиции 1 в позицию 2, взаимодействует с ЧЭ, расположенными вдоль прямых 3 и 4. Известными методами регистрируют скорости Vк1 и Vк2 распространения контакта ударника с ЧЭ, расположенными вдоль указанных прямых соответственно.
Из известных геометрических закономерностей, при рассмотрении треугольников, образованных ортогональными проекциями, аналогичными представленным на фигуре, используя теорему косинусов, вычисляют искомые параметры: β - угол подхода ударника относительно плоскости или оси, положение которой в пространстве известно (в приведенном примере - горизонтали), и Vn - скорость движения ударника в направлении нормали к его плоской поверхности.
Порядок вычислений следующий.
Первый шаг: используя зарегистрированные значения Vк1 и Vк2 и известный угол между ортогональными проекциями прямых, вдоль которых расположены чувствительные элементы, равный (180°-(α1+α2)) (см. фигуру), по теореме косинусов определяют промежуточный параметр вычислений X:

Отсюда, используя ту же теорему косинусов, вторым шагом определяют величину утла подхода β:
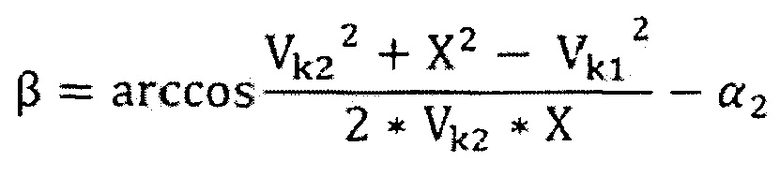
И завершающим шагом определяют скорость движения ударника в направлении нормали к его поверхности Vn:
Vn=Vk1*sin(α1-β)=Vk2*sin(α2+β)
Экспериментальные исследования подтвердили достижение технического результата.
Таким образом, реализация заявляемого способа обеспечивает получение информации о фактическом пространственном положении плоской поверхности ударника и скорости ее перемещения в направлении нормали к ней.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ И СКОРОСТИ ДВИЖУЩЕЙСЯ ПЛОСКОЙ ПОВЕРХНОСТИ | 2017 |
|
RU2672808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОТОКА МАСЛА ПРИ ОБНАРУЖЕНИИ ЧАСТИЦ МЕТАЛЛА В СРЕДСТВАХ ДИАГНОСТИКИ УЗЛОВ ТРЕНИЯ ГТД | 2020 |
|
RU2749574C1 |
| СПОСОБ УСКОРЕННОГО ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2010 |
|
RU2454626C2 |
| ВИХРЕТОКОВЫЙ ДАТЧИК СО СМЕЩЕННЫМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 2021 |
|
RU2778031C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2008 |
|
RU2390723C1 |
| Способ обнаружения с повышенной чувствительностью, определения вида и оценки размера частиц металла в процессе изнашивания подшипников в проточных системах смазки силовых установок | 2023 |
|
RU2814854C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАЗМЕРОВ ЕДИНИЧНЫХ ЧАСТИЦ МЕТАЛЛА В СИСТЕМЕ СМАЗКИ ПАР ТРЕНИЯ СИЛОВЫХ УСТАНОВОК | 2019 |
|
RU2724309C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ РАБОЧИХ ЛОПАТОК ТУРБИНЫ | 2013 |
|
RU2556297C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2009 |
|
RU2431114C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МОМЕНТА | 1972 |
|
SU342094A1 |
Изобретение относится к области контрольного испытательного оборудования и предназначено для применения при испытаниях на ударное воздействие. Сущность: при перемещении ударника в направлении нормали к его плоской поверхности в по крайней мере одной плоскости, перпендикулярной указанной поверхности ударника, вдоль не менее двух прямых размешают чувствительные элементы регистрирующих устройств, регистрируют контакт чувствительных элементов с поверхностью ударника. Определяют пространственное положение контакта и скорость его перемещения. Прямые, образованные чувствительными элементами, размещают пересекающимися в одной плоскости или перекрещивающимися в двух и более параллельных друг другу плоскостях, а положение и скорость движущейся поверхности плоского ударника определяют путем геометрических построений и расчетов с использованием зарегистрированных значений. Технический результат: получение информации о фактическом пространственном положении плоской поверхности ударника и скорости ее перемещения в направлении нормали к ней. 1 ил.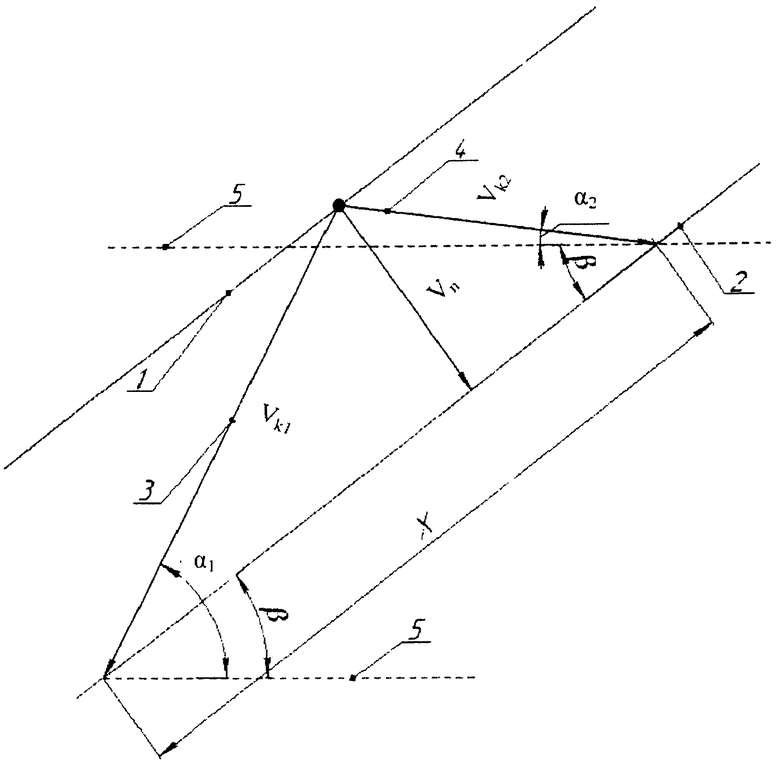
Способ определения положения и скорости плоской поверхности ударника, заключающийся в том, что при перемещении ударника в направлении нормали к его плоской поверхности в по крайней мере одной плоскости, перпендикулярной указанной поверхности ударника, вдоль не менее двух прямых размещают чувствительные элементы регистрирующих устройств, регистрируют контакт чувствительных элементов с поверхностью ударника, определяют пространственное положение контакта и скорость его перемещения, отличающийся тем, что чувствительные элементы размещают вдоль прямых, пересекающихся в одной плоскости или перекрещивающихся в двух и более параллельных друг другу плоскостях, а положение и скорость движущейся поверхности плоского ударника определяют путем геометрических построений и расчетов с использованием зарегистрированных значений.
| ИЗМЕРЕНИЕ ХАРАКТЕРИСТИК ДВИЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2382665C2 |
| СПОСОБ НЕПРЕРЫВНОЙ РЕГИСТРАЦИИ ПОЛОЖЕНИЯ, ПРОФИЛЯ И СКОРОСТИ ДВИЖУЩЕЙСЯ ПОВЕРХНОСТИ | 2003 |
|
RU2250434C1 |
| Механические кильблоки | 1928 |
|
SU15830A1 |
| US 5793357 A 11.08.1998. | |||

