Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к области обнаружения дефектов, в частности трещин, в железнодорожных рельсах.
Уровень техники
По причинам безопасности, важно, чтобы железнодорожные рельсы регулярно инспектировались на наличие слабых мест или дефектов. Изъян или дефект может быть существующей небольшой трещиной, или местом, где трещина может возникать. Трещины имеют тенденцию к росту, и лопнувший рельс может приводить к катастрофическим последствиям; таким образом, важно обнаруживать потенциальные места трещин как можно раньше. Многие трещины редко видны снаружи; если они существуют, то рельс, вероятно, полностью лопнул, а это та ситуация, которой необходимо избегать. Следовательно, требуется технология, которая способна обнаруживать дефекты в рельсе.
Такой технологией является ультразвуковое исследование. Кратко говоря, ультразвуковой импульс вводится в рельс, и отражение этого импульса детектируется. Импульс отражается от поверхностей материала, такой как наружная поверхность рельса, а также внутренняя поверхность дефекта. Таким образом, картина отражений в случае дефекта отличается от картины отражений в случае бездефектного рельса. Однако, хотя измерения могут выполняться стационарно с технической точки зрения, это является нежелательным с практической точки зрения, поскольку железная дорога должна оставаться открытой для железнодорожного движения. Поэтому, были разработаны мобильные системы, которые включают в себя железнодорожное транспортное средство, перевозящее мобильный ультразвуковой излучатель-приемник.
Такие мобильные системы, однако, привносят усложнение в части того, что ультразвуковой передатчик и ультразвуковой приемник движутся относительно осматриваемого рельса. Одним аспектом этого усложнения является то, что при этом сложнее достигать хорошего согласования сигнала между рельсом и излучателем-приемником. Другим аспектом этого усложнения является то, что импульсное измерение само требует некоторого времени измерения, в основном, обусловленного временем распространения импульса от ультразвукового передатчика до поверхности отражения и обратно к ультразвуковому приемнику. Это устанавливает ограничения на минимальную частоту повторения измерений. С другой стороны, частота повторения измерения, или лучше "период времени между последовательными измерениями", определяет пространственное расстояние между облучаемыми местоположениями рельса, указанное как "шаг дефектоскопии". С некоторым максимальным требованием для шага дефектоскопии (т.е., шаг должен быть некоторым значением или короче), в результате получается некоторая максимальная рабочая скорость для транспортного средства для проведения дефектоскопии (т.е., рабочая скорость не может быть выше некоторого значения). Данный факт, что железная дорога имеет тенденцию использоваться все более и более интенсивно, с поездами регулярного обращения, движущимися быстрее и/или с более короткими интервалами, желательно, чтобы максимальная рабочая скорость для транспортного средства для проведения дефектоскопии была настолько высокой, насколько возможно. Если транспортные средства для проведения дефектоскопии являются слишком медленными, они либо нарушают регулярное обслуживание, либо дефектоскопия может быть выполнена только в течение ночи, когда сокращается трафик.
Мобильные системы ультразвуковой дефектоскопии рельсов могут разделяться на два принципиально отличных типа. Оба типа требуют жидкое контактное вещество между ультразвуковым излучателем и рельсом. Первый тип системы дефектоскопии обозначается как система контактного типа: в этих системах излучатель удерживается на небольшом расстоянии от рельса, с тонкой пленкой контактной жидкости между ними. Недостатком этого типа системы является относительно большой расход контактной жидкости. Этот недостаток устраняется во втором типе системы дефектоскопии, которая обозначается как система колесного типа: в этих системах излучатель-приемник позиционируется внутри колесообразного контейнера, наполненного контактной жидкостью и едущего по рельсу, причем этот колесообразный контейнер имеет гибкую стенку, которая способна адаптироваться к форме головки рельса.
В практических обстоятельствах, с шагом дефектоскопии около 3 мм, максимальная рабочая скорость транспортного средства для проведения дефектоскопии равна приблизительно 72 км/ч для системы контактного типа и приблизительно 37 км/ч для системы колесного типа.
Сущность изобретения
Целью настоящего изобретения является улучшение существующей технологии таким образом, что максимальная рабочая скорость для транспортного средства для проведения дефектоскопии будет значительно увеличена, или шаг дефектоскопии может быть уменьшен, или достигнуты оба преимущества. Принцип, предложенный настоящим изобретением, применим в каждом типе системы дефектоскопии колесного типа и приведет в результате к улучшению в каждой системе по сравнению с возможностями такой системы без использования настоящего изобретения, при прочих равных, но степень улучшения может зависеть от фактической системы.
Краткое описание чертежей
Эти и другие аспекты, признаки и преимущества настоящего изобретения будут дополнительно пояснены посредством последующего описания одного или более предпочтительных вариантов осуществления со ссылкой на чертежи, на которых одинаковые ссылочные номера показывают одинаковые или похожие компоненты, и на которых:
Фиг. 1A - это схематичное сечение системы ультразвуковой дефектоскопии рельсов;
фиг. 1B схематично иллюстрирует расположение нескольких излучателей в системе ультразвуковой дефектоскопии рельсов;
Фиг. 2 - это график, показывающий ультразвуковые сигналы как функцию времени;
Фиг. 3 - это график, показывающий ультразвуковые сигналы как функцию времени;
фиг. 4 - это схематичная блок-схема ультразвуковой системы дефектоскопии рельсов;
фиг. 5 - это схематичное сечение системы ультразвуковой дефектоскопии рельсов;
фиг. 6 - это график, сопоставимый с фиг. 2;
фиг. 7 - это график, сопоставимый с фиг. 3;
Подробное описание изобретения
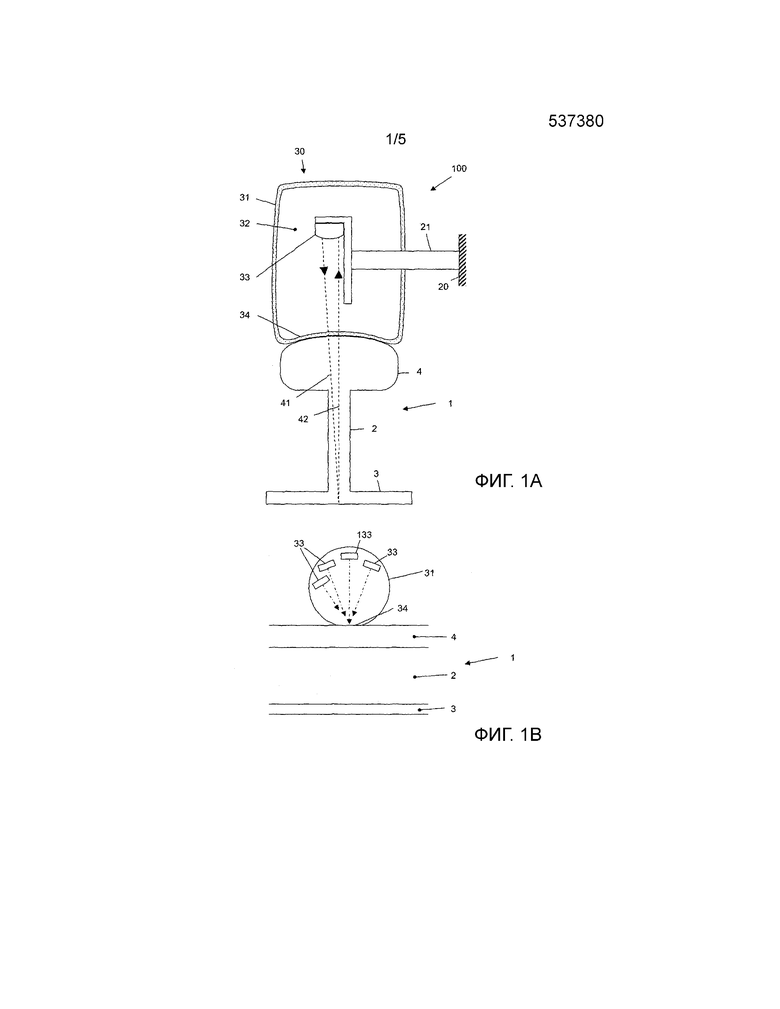
Фиг. 1A схематично показывает сечение рельса 1, имеющего центральное тело рельса или шейку 2, подошву 3 рельса и головку 4 рельса. Транспортное средство 100 для проведения дефектоскопии рельсов содержит держатель 21, установленный на раму 20. Транспортное средство 100 содержит систему 30 ультразвукового обследования рельса, которая включает в себя, по меньшей мере, один ультразвуковой излучатель-приемник 33, установленный на держателе 21 во вращающемся контейнере 31, наполненном контактной жидкостью 32, типично водой или гликолем или их смесью. Контейнер 31 прижимается к головке 4 рельса. Стенка контейнера 31 является гибкой, по меньшей мере, до некоторой степени, так что стенка контейнера адаптируется к форме верхней поверхности головки 4 рельса. Зона контакта стенки контейнера указывается позицией 34. При движении транспортного средства 100 по рельсу 1 контейнер 31 катится по рельсу и, следовательно, также обозначается как "колесо". Для более подробного описания примера такой системы колесного типа приводится ссылка на
US-541 9196 в качестве примера.
Отметим, что чертеж показывает только один излучатель-приемник 33, но на практике система 30 может содержать множество излучателей-приемников, направленных на рельс 1 под различными углами. Фиг. 1B - это схематичный вид сбоку колеса 31 на рельсе 1, показывающий множество излучателей-приемников 33, расположенных в колесе 31. Можно видеть, что излучатели-приемники направляют свои ультразвуковые лучи 41 на одну и ту же контактную зону 34 под различными углами. Эти углы стандартизированы; типичными углами являются 0°, 40°, 70°, как известно специалистам в области техники. И излучатели-приемники могут быть ориентированы в направлении вперед или назад.
Основное функционирование происходит следующим образом. В некоторый момент времени излучатель-приемник 33 отправляет ультразвуковой импульс 41 в головку 4 рельса через контактную зону 34. Ультразвуковой импульс 41 отражается от отражающей поверхности в рельсе 1. Отраженный импульс 42 принимается излучателем-приемником 33. Отражающая поверхность может быть дном подошвы 3 рельса, как показано на чертеже, но может также быть дефектом, таким как, например, трещина.
Фиг. 2 - это график, показывающий ультразвуковые сигналы как функцию времени. Горизонтальная ось представляет время, вертикальная ось представляет силу сигнала, в произвольных единицах измерения. В момент времени t0 излучатель-приемник 33 отправляет ультразвуковой импульс 41 в головку 4 рельса. В момент времени t0R отраженный импульс 42 принимается излучателем-приемником 33.
Расстояние между излучателем-приемником 33 и контактной зоной 34 может составлять приблизительно 135 мм. Скорость звука в контактной среде 32 равна приблизительно 1700 м/с. Следовательно, время распространения импульсов 41 и 42 в среде 32 равно приблизительно 160 мкс. Это время распространения будет указано как внутренняя задержка Δi.
В рельсе 1 скорость звука равна приблизительно 5900 м/с для продольной моды и приблизительно 3200 м/с для поперечной моды. Расстояние распространения (взад и вперед) в рельсе зависит от угла ультразвукового луча и от наличия дефектов. Теоретически, расстояние распространения может быть нулевым. Без дефектов расстояние распространения, например, для излучателя с углом 40° может составлять порядка 450 мм, в таком случае время распространения импульсов 41 и 42 в рельсе равно приблизительно 140 мкс для поперечной моды. Это время распространения будет указано как внешнее время Δe распространения. Таким образом, общий промежуток времени ∆t=∆i+∆β от t0 до t0R может измеряться в диапазоне 43 отражения от 160 до 300 мкс. Ширина этого диапазона 43 отражения соответствует максимальному ожидаемому внешнему времени ∆θMAX распространения.
Следует понимать специалисту в области техники, что вышеприведенное вычисление приведено в качестве примера, и что точные значения для данной конкретной системы могут отклоняться в зависимости от точной конструкции системы.
Когда выполняется дефектоскопия рельса, могут быть заданы требования или регламенты, определяющие разрешающую способность при обнаружении дефектов. Типичный требуемый максимальный шаг равен 3 мм, что, в сущности, означает, что ультразвуковые импульсы должны передаваться для каждых 3 мм хода движения транспортного средства. В применяемом в настоящее время уровне техники транспортное средство снабжается датчиком, который очень точно измеряет расстояние перемещения транспортного средства, и который отправляет возбуждающий импульс ультразвуковому излучателю после предварительно определенного расстояния, например, возбуждающий импульс для каждого 1, 2 или 3 мм продвижения. Однако, последующий ультразвуковой передаваемый импульс 44 в момент времени t1 не должен сталкиваться с отраженными импульсами, которые могут ожидаться вплоть до 300 мкс от предыдущего ультразвукового передаваемого импульса. Это означает, что возбуждающие импульсы могут иметь интервал не менее 300 мкс. В примере шага дефектоскопии в 3 мм это переводится в максимальную скорость транспортного средства, равную 37 км/ч.
Фиг. 3 - это график, сопоставимый с фиг. 2, показывающий ультразвуковые сигналы как функцию времени для системы, предложенной настоящим изобретением. Вместо передачи последующего ультразвукового импульса 44 после завершения диапазона 43 отражения настоящее изобретение предлагает передавать последующий ультразвуковой передаваемый импульс 44 в момент времени t1 перед началом диапазона 43 отражения. Дополнительно, вместо запуска ультразвукового излучателя посредством возбуждающих импульсов, получаемых из измерения расстояния распространения, ультразвуковой излучатель включается с постоянной частотой повторения, или, другими словами, с постоянным периодом повторения t1 - t0=P.
Фиг. 3 также показывает следующий последовательный ультразвуковой передаваемый импульс 45 в момент времени t2=t0+2P. Чертеж иллюстрирует, что ключевым моментом настоящего изобретения является то, что диапазон отражения, ассоциированный с N-ым передаваемым импульсом, всегда располагается между (N+1)-ым и (N+2)-ым передаваемыми импульсами. Будет видно, что применяются следующие формулы:
P≤∆i (1)
2P≥∆i+∆θMAX (2).
Из этих формул следует, что максимальное ожидаемое внешнее время ∆θMAX распространения должно быть меньше внутренней задержки ∆i, и что период P повтора ультразвуковых импульсов может быть задан в диапазоне от (∆i+∆θmax)/2 до Δi. На практике может быть, что сжатие контейнера 31 изменяется во время движения транспортного средства. Это будет приводить в результате к тому, что внутренняя задержка Δi изменяется. Для того, чтобы приспосабливаться к этому изменению, может быть предпочтительным, чтобы P был задан в центре упомянутого диапазона.
Для примера, который описан выше, с Δi=160 мкс и ∆θMAX=140 мкс, предпочтительное значение для периода P повтора ультразвуковых импульсов будет равно 155 мкс. Это означает, что шаг дефектоскопии в 3 мм будет достигаться при скорости транспортного средства около 70 км/ч.
Отметим, что JP-58151554 раскрывает способ обнаружения дефектов в донной части железнодорожного рельса. Ультразвуковой импульс a1 испускается в рельс под некоторым углом и будет отражаться от дна рельса как импульс b1 дна. В случае, когда не существует дефекта, этот импульс b1 дна не будет достигать ультразвукового излучателя. В случае, когда существует дефект, импульс будет отражаться от дефекта как отраженный импульс c1 по направлению к излучателю. Продолжительность времени между испусканием a1 и обнаружением c1 указывается как TE. Документ раскрывает, что испускается следующий ультразвуковой импульс a2, прежде чем отраженный импульс c1 достигнет излучателя. Время между a1 и a2 указывается как T, и применяется формула T < TE. Дополнительно, применяется формула 2T > TE. Однако, документ точно не указывает на систему дефектоскопии колесного типа, следовательно не упоминает движение звуковой волны в жидкой среде дефектоскопического колеса, и не раскрывает какое-либо отражение, возникающее от верхней поверхности рельса. Более конкретно, документ точно не определяет, что следующий ультразвуковой импульс a2 должен быть передан перед обнаружением отражения, возникающего от верхней поверхности рельса.
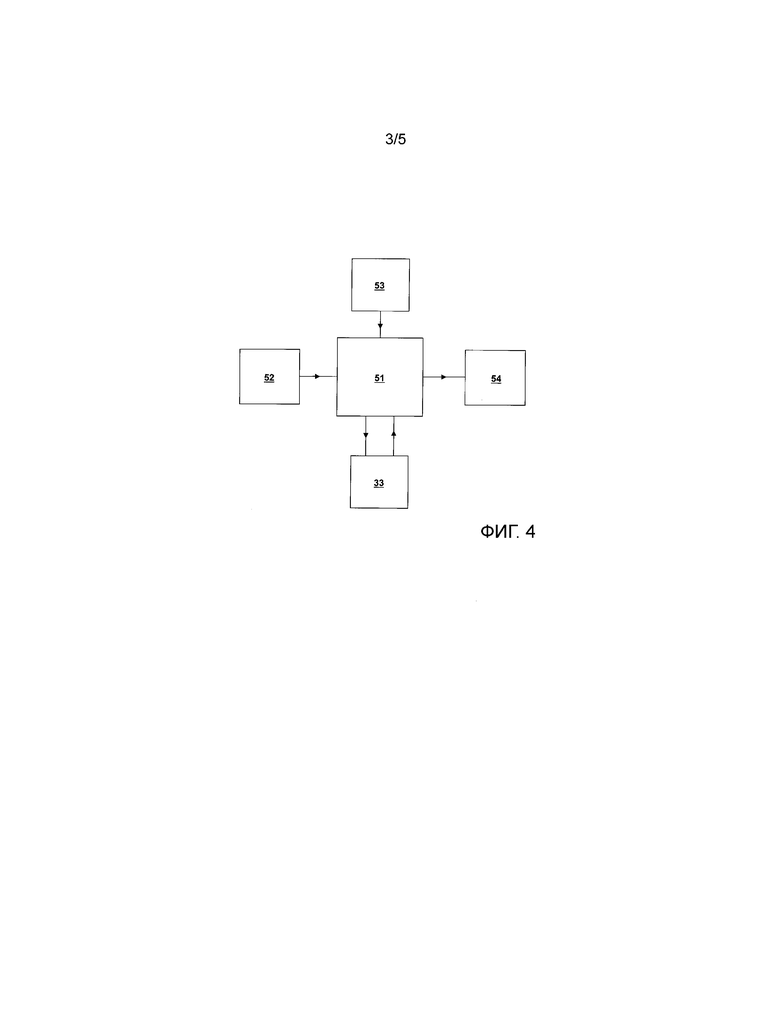
Фиг. 4 - это схематичная блок-схема системы 30 ультразвукового исследования рельса согласно настоящему изобретению. Ссылочный номер 51 указывает управляющее устройство, например, подходящим образом запрограммированный микропроцессор.
Ссылочный номер 52 показывает тактовый генератор для предоставления тактовых сигналов управляющему устройству 51. Тактовый генератор 52 может быть внешним компонентом по отношению к управляющему устройству 51, но может также быть интегрированным компонентом управляющего устройства 51. Управляющее устройство 51 выполнено так, чтобы на основе тактовых сигналов предоставлять возбуждающие сигналы для излучателя-приемника 33 с предварительно определенным периодом P повтора импульсов.
Ссылочный номер 53 показывает датчик для измерения расстояния движения транспортного средства 100. Такой датчик может, например, включать в себя тахометр для измерения угла поворота оси колеса транспортного средства 100. Выходной сигнал датчика предоставляется управляющему устройству 51.
Ссылочный номер 54 показывает устройство вывода. Устройство вывода может включать в себя, например, принтер, плоттер, монитор для отображения, запоминающее устройство. Управляющее устройство 51 программируется, чтобы формировать выходной сигнал, который содержит информацию из ультразвукового отраженного сигнала, принятую от излучателя-приемника 33, вместе с информацией о местоположении (расстоянии вдоль рельса), которая получается от датчика 53 расстояния движения. Информация из ультразвукового отраженного сигнала, принятая от излучателя-приемника 33, может включать в себя исходный принятый сигнал, который принимается излучателем-приемником 33, или обработанный сигнал, который показывает артефакты. Вместе с информацией о расстоянии, принятой от датчика 53, управляющее устройство 51 может переводить ультразвуковой отраженный сигнал в отображаемый сигнал как функцию местоположения. Использование датчика 53 предоставляет возможность транспортному средству двигаться с изменяющейся скоростью: при более низкой скорости отображаемые сигналы будут ближе друг к другу, а при более высокой скорости они будут дальше друг от друга, но они будут всегда коррелировать с расстоянием, что является интуитивно понятным для персонала, эксплуатирующего систему.
Хотя вышеприведенное объяснение содержит описание только для одного излучателя-приемника 33, следует понимать, что такое же объяснение применяется к системе, которая содержит два или более излучателей.
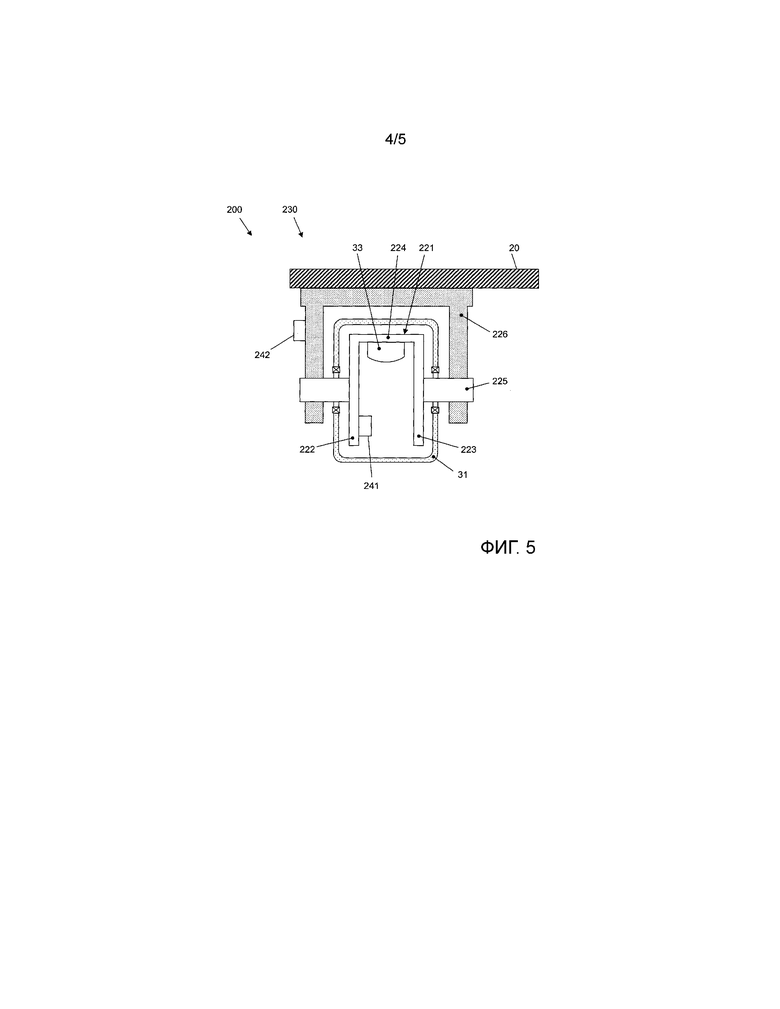
Фиг. 5 - это схематичное поперечное сечение системы 230 ультразвуковой дефектоскопии рельсов транспортного средства 200 для проведения дефектоскопии рельсов. Для системы 230 ультразвуковой дефектоскопии рельсов может применяться такое же пояснение, что и приведенное выше. Чертеж показывает излучатель-приемник 33, установленный на носитель 221, который имеет перевернутую U-образную форму с плечами 222, 223 и перемычкой 224. Плечи 222, 223 соединяются с двумя выровненными по линии половинами горизонтального вала 225. Колесо 31 вращается вокруг вала 225. Концы вала 225 устанавливаются в кронштейн 226 рамы, имеющий перевернутую U-образную форму и присоединяемый к раме 20 транспортного средства. Отметим, что система содержит множество излучателей, но чертеж показывает только один из них для упрощения.
Возможно менять набор излучателей простым способом: отсоединяя кронштейн 226 рамы от рамы 20 транспортного средства, весь блок из кронштейна 226 рамы, вала 225, носителя 221, излучателей-приемников 33, контейнера 31 с контактной жидкостью 32 может быть удален, и другой блок может быть установлен вместо него. Когда устанавливается такой блок, важно, чтобы блок устанавливался в правильной ориентации: излучатели должны иметь правильные ориентации относительно рельса. Каждый излучатель предназначен для того, чтобы направлять ультразвуковой луч на контактную зону 34 между контейнером 31 и головкой 4 рельса под конкретным углом, чтобы обнаруживать конкретные артефакты в конкретных местоположениях в рельсе 1, и нарушение ориентации носителя 221 приведет в результате к нарушению ориентации излучателей-приемников 33, что, в свою очередь, может приводить в результате к искаженным результатам измерения. Общепринятая практика заключается в том, что излучатели регулируются относительно рельса: например, выравнивание регулируется, пока 0°-излучатель не покажет максимум в силе приема, который указывает, что луч перпендикулярен рельсу. Однако, практические рельсы едва ли подходят для выполнения такого регулирования, и, следовательно, это выравнивание необходимо выполнять в лабораторной обстановке с фрагментом специального тестового рельса. Это очень затруднительно.
Для того, чтобы предоставить решение этой проблемы, настоящее изобретение предлагает присоединять первый 3D-гиродатчик 241 к носителю 221 и второй 3D-гиродатчик 242 к кронштейну 226 рамы. В ситуации регулирования, которое может выполняться в лабораторной обстановке и которое не требует присутствия поезда, излучатели точно выравниваются относительно носителя 221, и носитель 221 выравнивается относительно кронштейна 226 рамы с помощью первого гиродатчика 241. Второй гиродатчик 242 теперь устанавливается в ноль. Следовательно, всякий раз, когда второй гиродатчик 242 показывает нулевое показание, достоверно известно, что излучатели-приемники 33 выровнены правильно.
Когда этот блок устанавливается на транспортное средство для проведения дефектоскопии, может возникать ситуация, что монтажное приспособление транспортного средства не выровнено правильно. Это может быть показано как отклонение второго гиродатчика 242 и может быть компенсировано посредством регулирования установки кронштейна 226 рамы на раму 20 транспортного средства до тех пор, пока второй гиродатчик 242 не покажет отсчет уровня.
Ниже будет пояснена модификация настоящего изобретения.
Как упомянуто ранее, система типично содержит множество излучателей, и один из этих излучателей типично является так называемым 0°-излучателем, который является излучателем, который отправляет свой ультразвуковой луч 41 вертикально вниз. На фиг. 1B этот конкретный излучатель-приемник указывается по ссылочному номеру 133. В типичном варианте, это – излучатель-приемник для формирования продольных волн.
Помимо отражений, формируемых отражающей поверхностью в рельсе, также будет происходить отражение от межфазной границы между контактной жидкостью 32 и контактной зоной 34 стенки и отражение от межфазной границы между контактной зоной 34 стенки и верхней поверхностью головки 4 рельса. Принимая во внимание относительно небольшую толщину стенки 31, два отраженных импульса, получающихся в результате этих отражений, практически совпадают или, по меньшей мере, перекрываются и могут рассматриваться как один отраженный импульс, который обозначается как импульс межфазной границы.
В обычных условиях, т.е., при отсутствии дефектов, следовательно, будет происходить отражение от донной поверхности подошвы 3 рельса, как указано на фиг. 1A. Это отражение будет обозначено как импульс дна. Например, с высотой рельса 159 мм, импульс дна (продольная мода) типично ожидается примерно на 54 мс позже импульса межфазной границы. Отметим, что импульс дна сам частично отражается от верхней поверхности головки 4 рельса и затем снова отражается от донной поверхности подошвы 3 рельса, так что так называемый "повторный импульс дна" ожидается на 54 мс позже первого импульса дна. В действительности, это повторяющееся отражение вверх и вниз будет приводить в результате к цепочке импульсов с интервалом 54 мс, но каждый последующий импульс имеет амплитуду гораздо меньше соответствующего предыдущего импульса, так что на практике учитываются только первый и второй импульсы дна.
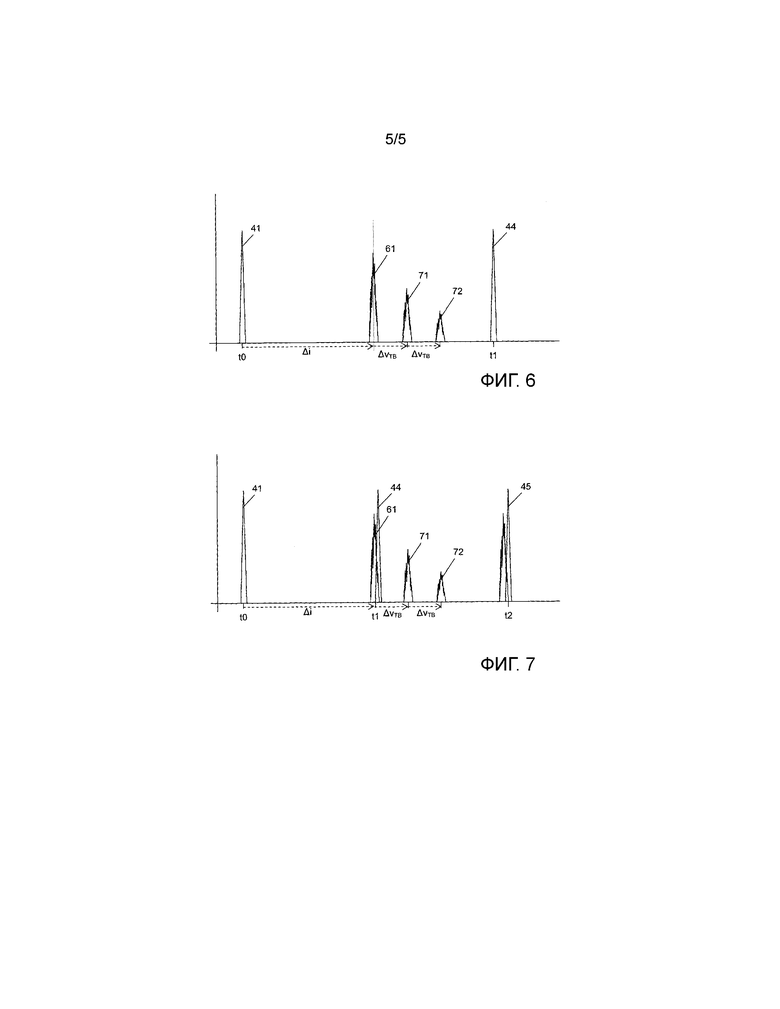
Фиг. 6 - это график, сопоставимый с фиг. 2, показывающий импульс межфазной границы по ссылочному номеру 61, показывающий импульс дна по ссылочному номеру 71 и показывающий повторный импульс дна по ссылочному номеру 72. ∆VTB показывает время распространения от верха к дну рельса и обратно по вертикальному пути. Этот чертеж также показывает, что, на предшествующем уровне техники, последующий импульс 44 будет передан после того, как была принята цепочка отраженных импульсов 71, 72 дна.
Фиг. 7 - это график, сопоставимый с фиг. 3, показывающий последующий передаваемый импульс 44, который в значительной степени совпадает с импульсом 61 межфазной границы. Это означает, что период P повтора импульсов равен Δi. Может быть, что управление устанавливает период повтора импульсов равным Δi, но также возможно, что управляющее устройство 51 обнаруживает прибытие импульса 61 межфазной границы и в ответ инициирует передачу следующего импульса. Отметим, что все излучатели возбуждаются в одно и то же время.
Отметим, что все излучатели-приемники 33 предпочтительно размещаются вдоль круговой дуги вокруг контактной зоны 34, так что внутренняя задержка Δi является одинаковой для всех излучателей, в таком случае управляющее устройство 51 может просто возбуждать все излучатели в одно и то же время. Если необходимо, корректировки такта для отдельных излучателей-приемников 33 могут быть выполнены, либо в аппаратных средствах, либо в программном обеспечении, например, посредством смещения излучателя. В любом случае, частота повтора импульсов теперь определяется по длине пути распространения в жидкости для 0°-излучателя-приемника 133.
Важно устанавливать соотношение передаваемого/отраженного импульса с конкретной позицией на рельсе. В конечном счете, если дефект обнаруживается, ремонт или замена должны быть выполнены в позиции дефекта. Для этой цели корреляции присутствует тахо-датчик, предоставляющий импульсные сигналы после некоторого расстояния движения, например, каждых 0,1 мм. Фактически, каждый тахо-импульс соответствует хорошо определенной позиции рельса. Тахо-импульсы могут быть введены в управляющее устройство 51, так что управляющее устройство 51, всякий раз, когда оно формирует возбуждающий сигнал и обрабатывает соответствующие отраженные сигналы, может устанавливать соотношение отраженных сигналов и любой возможной информации о дефекте, содержащейся в них, с тахо-сигналами и позиционной информацией, содержащейся в них, как следует понимать специалисту в области техники.
На фиг. 7 будет видно, что отраженные от дна импульсы 71, 72 из N-го передаваемого импульса 41 0°-излучателя-приемника 133 будут приняты между (N+1)-ым и (N+2)-ым передаваемыми импульсами 44 и 45, т.е., во временном интервале, необходимом для того, чтобы (N+1)-ый передаваемый импульс 44 распространился по направлению к контактной зоне 34 межфазной границы и обратно. Временной интервал ΔVTB, необходимый, чтобы продольная звуковая волна распространилась от верхней поверхности рельса к донной поверхности рельса и обратно, будет очевидно зависеть от геометрии рельса. Любые отражения от дефектов или объектов в головке рельса, шейке или подошве будут приниматься в этом временном интервале.
Специалисту в данной области техники должно быть понятно, что настоящее изобретение не ограничено примерными вариантами осуществления, описанными выше, но что несколько изменений и модификаций возможны в рамках настоящего изобретения, которые определены прилагаемой формулой. Например, две или более функций могут быть выполнены посредством одного объекта, блока или процессора. Даже если некоторые признаки перечисляются в различных зависимых пунктах формулы, настоящее изобретение также относится к варианту осуществления, содержащему эти признаки совместно. Любые ссылочные знаки в формуле изобретения не должны истолковываться как ограничивающие рамки этой формулы изобретения.
В вышесказанном настоящее изобретение было объяснено со ссылкой на блок-схемы, которые иллюстрируют функциональные блоки устройства согласно настоящему изобретению. Должно быть понятно, что один или более этих функциональных блоков могут быть реализованы в аппаратных средствах, где функция такого функционального блока выполняется отдельными компонентами аппаратного средства, но также возможно, что один или более из этих функциональных блоков осуществлены в программном обеспечении, так что функция такого функционального блока выполняется одной или более программными строками компьютерной программы или программируемым устройством, таким как микропроцессор, микроконтроллер, процессор цифровых сигналов и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОДОЛЬНО-ПОПЕРЕЧНЫЙ СПОСОБ РЕАЛИЗАЦИИ ЭХОЛОКАЦИОННОГО МЕТОДА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЯ ПО ВСЕМУ СЕЧЕНИЮ | 2014 |
|
RU2585304C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УЗЛОВ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2480741C1 |
| Способ диагностирования цельнокатаного колеса на ходу поезда | 2020 |
|
RU2739344C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2720043C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ АЛЮМИНОТЕРМИТНОГО СВАРНОГО СОЕДИНЕНИЯ РЕЛЬСОВ | 2016 |
|
RU2643866C1 |
| Способ ультразвукового контроля локальных участков рельсов | 2023 |
|
RU2823665C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ КОНТРОЛЯ ГОЛОВКИ РЕЛЬСОВ | 2001 |
|
RU2184374C1 |
| Ультразвуковой способ оценки дефектов в головке рельсов и определения профиля поверхности катания | 2022 |
|
RU2785302C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ЭКВИДИСТАНТНЫМИ ПОВЕРХНОСТЯМИ | 2020 |
|
RU2725705C1 |
| Ультразвуковой способ обнаружения дефектов в головке рельса | 2022 |
|
RU2783753C1 |

Использование: для ультразвуковой дефектоскопии рельсов. Сущность изобретения заключается в том, что система ультразвуковой дефектоскопии рельсов включает в себя, по меньшей мере, один ультразвуковой излучатель-приемник, установленный на держателе для присоединения к раме транспортного средства для проведения дефектоскопии рельсов. Ультразвуковой излучатель-приемник передает ультразвуковые импульсы и принимает отраженные ультразвуковые импульсы. Управляющее устройство управляет ультразвуковым излучателем-приемником. Тактовый генератор предоставляет тактовые сигналы управляющему устройству. Управляющее устройство управляет ультразвуковым излучателем-приемником, чтобы передавать ультразвуковые импульсы с фиксированным периодом повтора импульсов. Технический результат: значительное увеличение максимальной рабочей скорости транспортного средства дефектоскопии рельсов, а также уменьшение шага дефектоскопии. 3 н. и 4 з.п. ф-лы, 8 ил.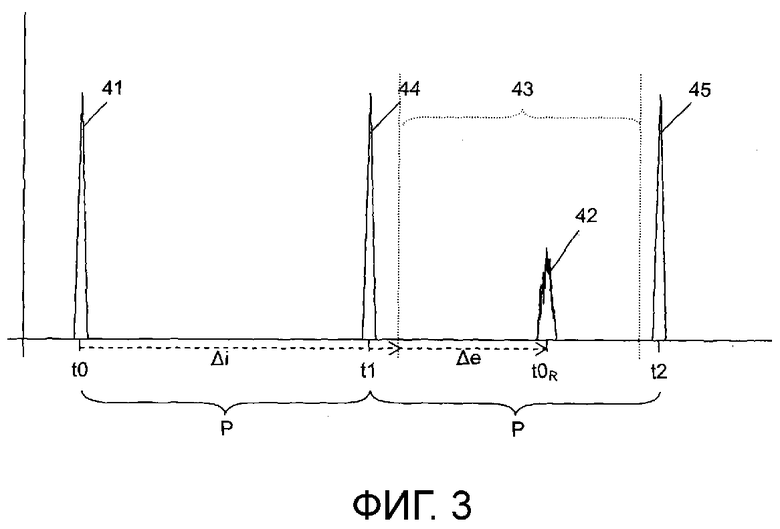
1. Система (30) ультразвуковой дефектоскопии рельсов, включающая в себя по меньшей мере один ультразвуковой излучатель-приемник (33), установленный на держателе (21) для присоединения к раме (20) транспортного средства (100) для проведения дефектоскопии рельсов, при этом система дефектоскопии рельсов является системой колесного типа, в которой излучатель-приемник (33) размещается в колесообразном контейнере (31), наполненном контактной жидкостью (32) и едущем по проверяемому рельсу (1);
при этом ультразвуковой излучатель-приемник (33) выполнен с возможностью передачи ультразвуковых импульсов (41) и приема отраженных ультразвуковых импульсов (42);
управляющее устройство (51) для управления ультразвуковым излучателем-приемником (33);
тактовый генератор (52) для предоставления тактовых сигналов управляющему устройству (51);
при этом управляющее устройство (51) выполнено с возможностью управления ультразвуковым излучателем-приемником (33) для передачи ультразвуковых импульсов (41) с фиксированным периодом (P) повтора импульсов, который удовлетворяет следующим формулам:
P≤∆i (1);
2P≥∆i+∆eMAX (2), где
Δi показывает время распространения ультразвуковых импульсов (41, 42) от излучателя-приемника (33) к проверяемому рельсу (1) и обратно, и
в которых ∆eMAX показывает максимальное ожидаемое время распространения ультразвуковых импульсов (41, 42) в таком рельсе.
2. Система ультразвуковой дефектоскопии рельсов по п. 1, в которой период (P) повтора импульсов удовлетворяет формуле P=(3Δi +∆eMAX)/4.
3. Система (30) ультразвуковой дефектоскопии рельсов, включающая в себя по меньшей мере один ультразвуковой 0°-излучатель-приемник (133), установленный на держателе (21) для присоединения к раме (20) транспортного средства (100) для проведения дефектоскопии рельсов, при этом система дефектоскопии рельсов является системой колесного типа, в которой излучатель-приемник (33) размещается в колесообразном контейнере (31), наполненном контактной жидкостью (32) и едущем по проверяемому рельсу (1);
при этом ультразвуковой излучатель-приемник (133) выполнен с возможностью передачи ультразвуковых импульсов (41) под углом 0° относительно нормали к контактной поверхности осматриваемого рельса и приема отраженных ультразвуковых импульсов (42);
управляющее устройство (51) для управления ультразвуковым излучателем-приемником (133);
при этом управляющее устройство (51) выполнено с возможностью управления ультразвуковым излучателем-приемником (133) для передачи следующего ультразвукового импульса (44) непосредственно при приеме отраженного импульса (61), отражающегося от контактной поверхности осматриваемого рельса.
4. Система ультразвуковой дефектоскопии рельсов по п. 3, включающая в себя множество ультразвуковых излучателей-приемников (33), установленных на держателе (21);
при этом управляющее устройство (51) выполнено с возможностью непосредственно при приеме упомянутого отраженного импульса (61), ассоциированного с 0°-излучателем-приемником (133), запускать каждый ультразвуковой излучатель-приемник (33) для передачи следующего ультразвукового импульса (44), при этом все ультразвуковые излучатели-приемники (33) возбуждаются в одно и то же время.
5. Система ультразвуковой дефектоскопии рельсов по п. 4, в которой расстояние между 0°-излучателем-приемником (133) и контактной поверхностью осматриваемого рельса задается так, что каждый ультразвуковой излучатель-приемник (33) передает свой следующий ультразвуковой импульс (44) всегда перед отраженными импульсами (61), соответствующими предыдущим ультразвуковым импульсам (41) соответствующих ультразвуковых излучателей-приемников (33).
6. Система ультразвуковой дефектоскопии рельсов по любому из пп. 1-5, включающая в себя по меньшей мере один ультразвуковой излучатель-приемник (33), установленный на носитель (221), который устанавливается на кронштейн (226) рамы, который приспособлен для присоединения к раме (20) транспортного средства (100) для проведения дефектоскопии рельсов; и
система дополнительно содержит первый 3D-гиродатчик (241), присоединенный к носителю (221), и второй 3D-гиродатчик (242), присоединенный к кронштейну (226) рамы.
7. Транспортное средство (100) для проведения дефектоскопии рельсов, оборудованное системой ультразвуковой дефектоскопии рельсов по любому из пп. 1-6.
| DE 102004026995 A1, 06.07.2006 | |||
| US 4174636 A, 20.11.1979 | |||
| US 4487071 A, 11.12.1984 | |||
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПОДОШВЫ РЕЛЬСА | 2007 |
|
RU2353924C1 |
| СПОСОБ СПЛОШНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПОДОШВЫ РЕЛЬСОВ | 2010 |
|
RU2433397C1 |
| Лубрикатор для смазки рельсов | 1959 |
|
SU126141A1 |

