Заявляемое изобретение относится к навигации и, в частности, может быть использовано для определения координат буксируемого комплекса (БК) во время выполнения работ по поиску затонувших объектов в районах шельфа.
Определение координат поискового БК является важной задачей, решение которой позволяет выполнить пространственную привязку обнаруженных объектов.
Известна система определения координат БК, построенная на обработке данных о положении буксирующего судна (БС), длины вытравленного кабель-троса, глубины и скорости буксировки (Crawford, А. М. 2002. Methods for Determining Towfish Location for Improvement of Sidescan Sonar Image Positioning. DREA TM 2002-019. Defence R&D Canada - Atlantic). Система реализует оценку координат БК в зависимости от длины вытравленного кабель-троса, глубины и скорости буксировки, а также на допущении, что линия пути БК повторяет линию пути БС. Отклонения указанных линий в реальных условиях, а также отсутствие учета направления и скорости подводных течений ограничивают широкое применение данной системы.
Среди акустических систем определения координат БК наиболее широкое распространение получили системы с гидроакустическими маяками (ГМ) (Милн П.X. Гидроакустические системы позиционирования: Пер. с англ. - Л.: Судостроение, 1989. - С. 22-23).
Известна гидроакустическая система с длинной базой (ДБ-система). В этой системе определение координат БК основано на измерении расстояний до трех и более ГМ, придонных (Милн П.X. Гидроакустические системы позиционирования: Пер. с англ. - Л.: Судостроение, 1989. - С. 49-85) или поверхностных (H.G. Thomas. GIB buoys: An interface between space and depths of the oceans. In Proceedings of IEEE Autonomous Underwater Vehicles, Cambridge, MA, USA, pages 181-184, August 1998), с известными координатами их расположения. Использование ДБ-систем требует применения ГМ с длительным сроком автономности, значительных временных затрат на их постановку, координирование (в случае постановки на грунт) и съем, и ограничивает радиус действия БК дальностью связи с сетью ГМ.
Известны две гидроакустические системы: с короткой базой (КБ-система) и ультракороткой базой (УКБ-система) (Гидроакустические навигационные средства / Бородин В.И. и др. - Л: Судостроение, 1983. - С. 9-15). В КБ-системе координаты БК определяют путем измерения расстояний между ГМ, установленным на БК, и как минимум тремя пространственно-разнесенными приемниками, закрепленными на корпусе БС. УКБ-система является одним из вариантов концепции КБ-систем, в которой измеряют расстояние до ГМ и направление на него относительно одного многоэлементного приемника. Недостатком КБ-систем является необходимость оборудования БС спускоподъемными устройствами с приемниками на расстоянии не менее 10-50 м друг от друга (IMCA S 013 Rev. 1. Deep Water Acoustic Positioning. July 2014), что не позволяет использовать маломерные суда в качестве БС. УКБ-системы свободны от этого недостатка, однако обладают меньшей (до 2.5% от глубины погружения БК или верхнего предела измерения расстояний), чем в КБ и ДБ-системах точностью определения координат (IMCA S 017. Guidance on Vessel USBL Systems for Use in Offshore Survey and Positioning Operations. April 2011).
Наиболее близкой по технической сущности к предлагаемому изобретению является батиметрическая система навигации, которая содержит: размещенные на БС аппаратуру спутниковой навигации (АСН) и многолучевой эхолот (МЛЭ), предназначенные для формирования карты глубин, и устройство обработки навигационной информации (УОНИ); размещенные на БК датчик гидростатического давления (ДД) и однолучевой эхолот, с помощью которых определяют профиль глубин вдоль линии пути БК, при этом выходы УОНИ подключены к входам АСН, МЛЭ, ДД и однолучевого эхолота.
В системе-прототипе глубина погружения БК рассчитывается по данным ДД, а положение БК определяется в результате сопоставления профиля глубин вдоль линии пути БК с картой глубин, формируемой по ходу движения БС (Crawford, А. М. 2002. Two Methods of Bathymetry-Sidescan Sonar Data Comparison for Improved Determination of Sonar Towfish Position. TM 2002-110. DRDC Atlantic). Сопоставление выполняется путем оценки взаимокорреляционной функции и поиском максимума этой функции.
Основной недостаток системы-прототипа заключается в неоднозначности определения координат БК на участках с ровным (не имеющим резких перепадов) профилем глубин вдоль линии пути БК.
Задача предложенного изобретения состоит в обеспечении однозначности определения координат БК при проведении поисковых работ, не зависимо от профиля глубин вдоль линии пути БК.
Технический результат заключается в определении координат БК с помощью артефактов искусственного или естественного происхождения, находящихся в полосе обзора поисковых гидроакустических станций БС и БК.
Для достижения заявленного технического результата в известную систему определения координат БК, которая содержит размещенные на БС АСН и МЛЭ, предназначенные для формирования карты глубин, и УОНИ, а также размещенный на БКДД, введены новые признаки, а именно:
- УОНИ выполнено, содержащим блок вычисления глубин (БВГ), первый и второй блок обнаружения признаков (БОП), блок сравнения признаков (БСП), при этом первый вход первого БОП соединен с первым выходом АСН, а второй - с выходом МЛЭ, вход второго БОП соединен с выходом БВГ, первый вход которого соединен со вторым выходом АСН, а второй - с выходом ДД, выход первого БОП соединен с первым входом БСП, а выход второго БОП - со вторым входом БСП;
- на БК установлен гидролокатор переднего обзора (ГПО) ближнего действия, при этом выход ГПО соединен с третьим входом БВГ;
- на БК установлен датчик курса (ДК), при этом выход ДК соединен с третьим входом БСП.
Технический результат достигается тем, что положение БК определяется относительно ориентиров (маркеров), в качестве которых могут использоваться специфические неровности поверхности дна, затонувшие объекты или объекты подводной инфраструктуры, координаты которых заранее известны или могут быть определены с помощью средств БС. При этом определение координат БК достигается за счет отождествления подводных ориентиров с совокупностью идентификационных признаков (ИДП).
Сущность изобретения поясняется на фиг. 1, 2 и 3.
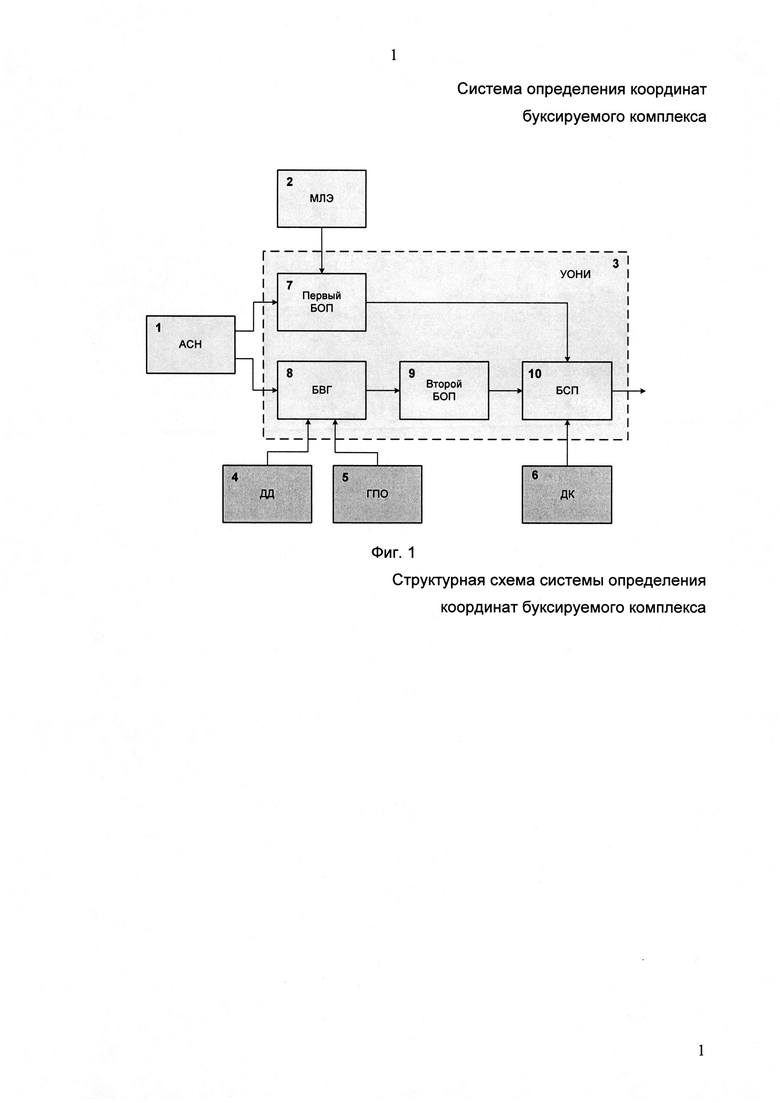
На фиг. 1 показана структурная схема системы определения координат БК.
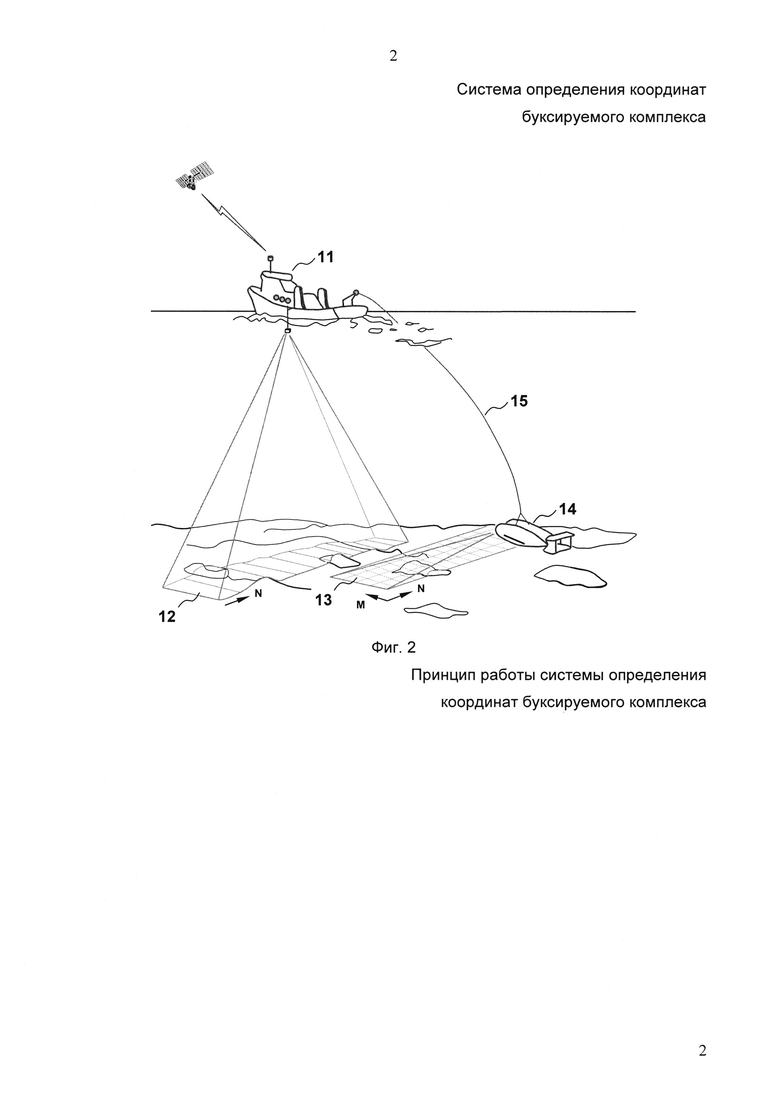
На фиг. 2 изображен принцип работы системы определения координат БК.
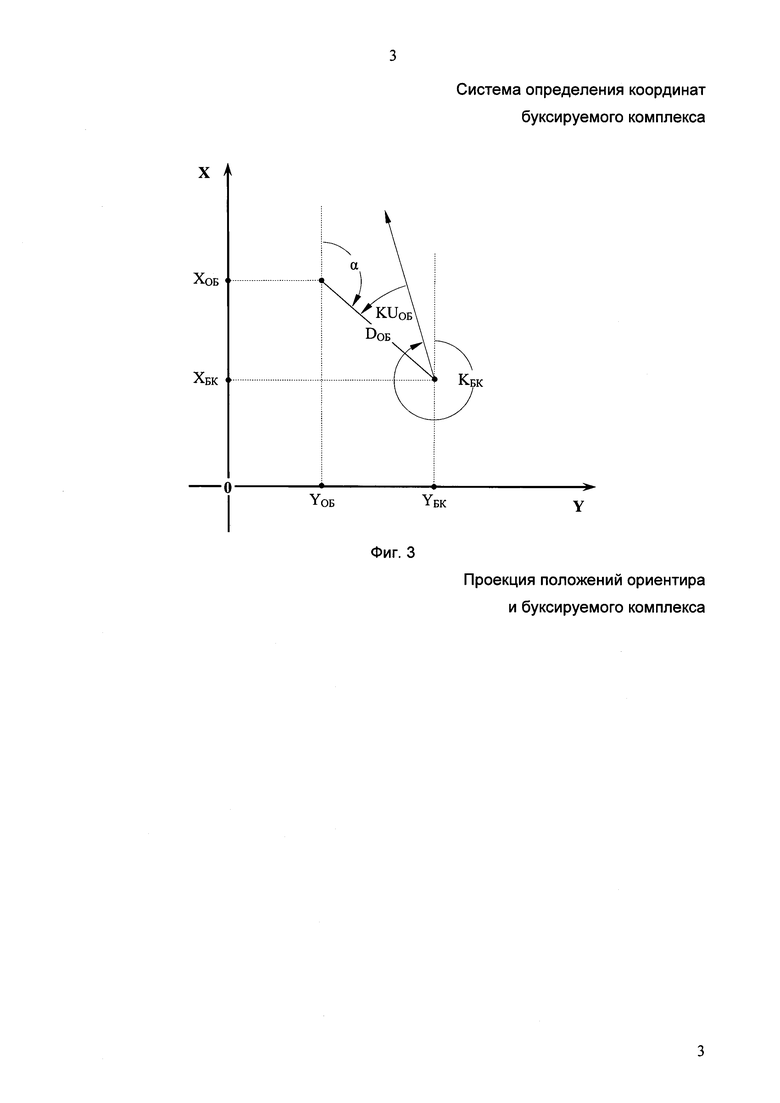
На фиг. 3 приведена проекция положений ориентира и БК.
Заявляемая система (фиг. 1) содержит установленные на буксирующем судне (БС) аппаратуру 1 спутниковой навигации (АСН 1), многолучевой эхолот 2 (МЛЭ 2), устройство 3 обработки информации (УОНИ 3) и, размещенные на буксируемом комплексе (БК), датчик 4 гидростатического давления (ДД 4), гидролокатор 5 переднего обзора (ГПО 5) и датчик 6 курса (ДК 6). УОНИ 3 состоит из первого блока 7 обнаружения признаков (БОП 7), блока 8 вычисления глубин (БВГ 8), второго БОП 9 и блока 10 сравнения признаков (БСП 10).
Первый вход первого БОП 7 соединен с первым выходом АСН 1, а второй вход - с выходом МЛЭ 2, вход второго БОП 9 соединен с выходом БВГ 8, первый вход которого соединен со вторым выходом АСН 1, второй - с выходом ДД 4, а третий - с выходом ГПО 5. Выход первого БОП 7 соединен с первым входом БСП 10, выход второго БОП 9 - со вторым входом БСП 10, а выход ДК 6 - с третьим входом БСП 10. С выхода БСП 10 выдаются координаты БК.
АСН 1 представляет собой судовую навигационную аппаратуру глобальных спутниковых навигационных систем, предназначенную для выработки координат БС в проекции Гаусса-Крюгера. АСН 1 состоит из аппаратной части и антенны. В качестве АСН 1 можно использовать навигационную аппаратуру потребителей «Интеграция» предприятия АО «РИРВ».
МЛЭ 2 представляет собой гидроакустическую станцию, предназначенную для определения глубин в широкой полосе обзора. МЛЭ 2 состоит из аппаратной части, приемной и излучающей гидроакустических антенн. В качестве МЛЭ 2 можно использовать многолучевой эхолот «SeaBat 7125» компании «Teledyne RESON».
УОНИ 3 представляет собой судовую электронно-вычислительную машину, предназначенную для ввода первичной навигационной информации и выполнения навигационных вычислений. В качестве УОНИ 3 можно использовать специализированный блок ЭВМ предприятия АО НПП «АМЭ».
ДД 4 представляет собой прецизионный датчик давления, выполненный на основе высокодобротного кварцевого резонатора, обладающего долговременной стабильностью калибровочных характеристик. ДД 4 предназначен для измерения гидростатического давления с компенсацией температурной погрешности. В качестве ДД 4 можно использовать датчик «MinilPS» компании «Valeport Limited».
ГПО 5 представляет собой гидроакустическую станцию секторного обзора ближнего действия, предназначенную для определения глубин относительно БК. ГПО 5 состоит из аппаратной части, приемной и излучающей гидроакустических антенн. Для определения относительных глубин ГПО 5 содержит несколько наборов (минимум два) активных элементов в приемной антенне, что позволяет оценить интерферометрическим способом угол прихода эхо-сигнала с дальнейшим вычислением глубины (George Yufit and Eric P. Maillard. 3D Forward Looking Sonar Technology for Surface Ships and AUV: Example of Design and Bathymetry Application. Underwater Technology Symposium, 2013). В качестве ГПО 5 можно использовать гидролокатор «SeaBat 7130» компании «Teledyne RESON».
ДК 6 представляет собой микроэлектромеханический датчик, состоящий из трехосевых гироскопа, акселерометра, магнитометра и цифрового сигнального процессора. ДК 6 предназначен для выработки истинного курса БК. В качестве ДК 6 можно использовать датчик «Ekinox-А» компании «SBG Systems».
Система работает следующим образом.
С помощью АСН 1 определяют координаты БС 11 (фиг. 2).
Одновременно с этим при работе МЛЭ 2 в результате пространственного перекрытия характеристики направленности (ХН) в излучении и «веера» из N приемных ХН с акустически освещенной поверхностью образуется полоса обзора 12, состоящая из N участков. Для каждого n-го участка в аппаратной части МЛЭ 2 выполняют оценку глубины моря, совокупность которых составляет поперечный профиль глубин размерностью N.
В первом БОП 7 осуществляют накопление М профилей глубин с выхода МЛЭ 2 (формирование матрицы Z размерностью M×N, содержащей значения глубин) с привязкой элементов матрицы к сетке координат в проекции Гаусса-Крюгера с выхода АСН 1, формируют порог обнаружения ПОР, и производят сравнение значений элементов матрицы Z с порогом обнаружения ПОР (формирование матрицы ZОР размерностью M×N, содержащей значения высот) согласно выражению

Алгоритм формирования порога обнаружения ПОР заключается в обнаружении и цензурировании выбросов, обусловленных локально-протяженными и протяженными объектами и (или) неровностями морского дна, и не использовании решений об обнаружении, сформированных по этим объектам и неровностям, в процедуре формирования порога (Помехозащищенный обнаружитель сигналов обзорного гидролокатора. Войтов А.А., Казаков Б.М., Корнеев А.Ю., Корнеев Ю.А., Хаметов Р.К. Патент РФ №143489 от 27.07.2014 г.).
Далее в первом БОП 7 выполняют формирование следов ориентиров путем группирования отличных от нуля значений элементов матрицы ZОР по связности (без разрывов между элементами) и вычисляют идентификационные признаки (ИДП) ориентиров. Под следом ориентира понимается двумерный «выброс» над порогом обнаружения ПОР.
В качестве ИДП ориентира используются геометрические признаки (объем и средняя высота) ориентира и его координаты.
При необходимости набор геометрических признаков может быть расширен.
Средняя высота Zmid(i) i-го ориентира определяется как арифметическое среднее значений элементов, составляющих след i-го ориентира

где SОР(i) - площадь следа i-го ориентира, определяется как сумма элементов, составляющих след i-го ориентира

Объем VОР(i) i-го ориентира определяется как сумма значений элементов, составляющих след i-го ориентира

Для выражений (2)-(4)
Sld(m,n|i)=1 - для всех элементов следа i-го ориентира,
Sld(m,n|i)=0 - вне следа i-го ориентира.
Координаты i-го ориентира определяются поиском элемента следа i-го ориентира, значение которого максимально, с присвоением ориентиру координат найденного элемента.
При работе ГПО 5 в результате пространственного перекрытия ХН в излучении и как минимум двух (в минимальной конфигурации) «вееров» из N приемных ХН с акустически освещенной поверхностью образуется зона обзора 13 (фиг. 2), состоящая из N участков. Для каждого n-го участка в аппаратной части ГПО 5 по разности фаз эхо-сигналов, принятых одновременно несколькими наборами элементов приемной гидроакустической антенны, выполняют оценку глубин относительно БК 14, значения которых образуют матрицу Z1 размерностью M×N. Кроме того, в ГПО 5 выполняют оценку расстояний до соответствующих участков дна в зоне обзора 13 относительно БК 14 (формирование матрицы RОБ размерностью M×N).
Одновременно с этим с помощью ДД 4 и ДК 6 оценивают гидростатическое давление и истинный курс БК 14.
Информацию, формируемую ДД 4, ГПО 5 и ДК 6, передают по кабель-тросу 15 в УОНИ 3 для дальнейшей обработки с целью определения координат БК.
В БВГ 8 выполняют оценку глубины погружения БК 14 по данным ДД 4 и АСН 1 в соответствии с формулой Лероя (С.С. Leroy and F. Parthiot. Depth-pressure relationships in the oceans and seas. Journal of the Acoustical Society of America, vol 103, no. 3, pp. 1346-1352, March 1998), а затем и глубин моря (формирование матрицы Z2 размерностью M×N) согласно выражению 
где DБК - глубина погружения БК 14.
Во втором БОП 9 производят формирование порога обнаружения ПОБ и сравнение значений элементов матрицы Z2 с порогом обнаружения ПОБ (формирование матрицы ZОБ размерностью M×N, содержащей значения высот) согласно выражению

Алгоритм формирования порога обнаружения ПОБ аналогичен алгоритму формирования порога обнаружения ПОР, реализуемому в первом БОП 7.
Далее во втором БОП 9 выполняют формирование следов объектов путем группирования отличных от нуля значений элементов матрицы ZОБ по связности, вычисление ИДП объектов и отбор объекта, площадь следа которого максимальна. Под следом объекта понимается двумерный «выброс» над порогом обнаружения ПОБ.
В качестве ИДП объекта используются геометрические признаки (объем и средняя высота) объекта, координаты и глубина объекта, расстояние до объекта и направление (курсовой угол) на объект.
Геометрические признаки j-го объекта вычисляются по формулам, которые аналогичны формулам (2)-(4), реализуемым в первом БОП 7.
Расстоянию до j-го объекта соответствует значение элемента матрицы RОБ, индексы которого определяются в результате поиска элемента следа j-го объекта, значение которого максимально.
Глубина ZОБ(i) j-го объекта определяется согласно выражению

где Zmax(i) - максимальное значение элемента следа j-го объекта.
Курсовой угол KUОБ(i) j-го объекта определяется согласно выражению

где ΔKU - угловой размер шага по курсовому углу ГПО 5; NKU(i) - номер столбца элемента следа j-го объекта, значение которого максимально; NΣ - общее число столбцов матрицы ZОБ.
В БСП 10 выполняют сравнение объекта, площадь следа которого максимальна, с выхода второго БОП 9 с ориентирами с выхода первого БОП 7, осуществляют определение координат объекта и координат БК 14.
В качестве меры сходства используется метрика, имеющая следующий вид

где ИДП(k|i) - k-й геометрический признак i-го ориентира; ИДП(k) - k-й геометрический признак объекта, площадь следа которого максимальна.
По результатам сравнения объекту присваиваются координаты ориентира, для которого метрика Metr имеет минимальное значение.
Координаты БК 14 определяются согласно выражениям (фиг. 3)

где ХОБ, YОБ - координаты объекта в проекции Гаусса-Крюгера; RОБ - расстояние до объекта; ZОБ - глубина объекта; DБК - глубина погружения БК 14; α - дирекционный угол, определяемый согласно выражению

где ПОБ - истинный пеленг объекта, определяемый согласно выражению

где KUОБ - курсовой угол объекта; KБК - истинный курс БК 14.
Предложена система определения координат БК путем выделения подводного ориентира (артефакт искусственного или естественного происхождения) и расчета его координат. Таким образом, технический результат достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВИГАЦИИ БУКСИРУЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2529207C1 |
| Приемный тракт гидролокатора | 2019 |
|
RU2719730C1 |
| Способ обсервации подводного аппарата | 2021 |
|
RU2763114C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ДНА МНОГОЛУЧЕВЫМ ЭХОЛОТОМ | 2014 |
|
RU2555204C1 |
| Способ обнаружения объектов, находящихся в толще донного грунта, и определение их местоположения | 2017 |
|
RU2650842C1 |
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| Гидроакустическая станция для обнаружения малоразмерных объектов | 2017 |
|
RU2680673C1 |
| ПОДВОДНЫЙ АППАРАТ ДЛЯ УНИЧТОЖЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНОГО СТАЦИОНАРНОГО ОБЪЕКТА | 2017 |
|
RU2670192C9 |
| Способ разработки и настройки бортовой навигационной системы автономного необитаемого подводного аппарата | 2024 |
|
RU2823256C2 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709059C1 |
Изобретение относится к навигации и, в частности, может быть использовано для определения координат буксируемого комплекса (БК) во время выполнения работ по поиску затонувших объектов в районах шельфа. Технический результат заключается в определении координат БК с помощью артефактов искусственного или естественного происхождения, находящихся в полосе обзора поисковых гидроакустических станций буксирующего судна (БС) и БК. Указанный результат достигается за счет использования гидролокатора переднего обзора ближнего действия и датчика курса, установленных на БК, а также за счет выполнения определенным образом устройства обработки информации, содержащего блок вычисления глубин, два блока обнаружения признаков, блок сравнения признаков. 3 ил.
Система определения координат буксируемого комплекса (БК), которая содержит размещенные на буксируемом судне (БС) аппаратуру спутниковой навигации (АСН) и многолучевой эхолот (МЛЭ), предназначенные для формирования карты глубин, и устройство обработки навигационной информации (УОНИ), а также размещенный на БК датчик гидростатического давления (ДД), отличающаяся тем, что в нее введены гидролокатор переднего обзора (ГПО) ближнего действия и датчик курса (ДК), установленные на БК, а УОНИ выполнено содержащим блок вычисления глубин (БВГ), первый и второй блоки обнаружения и расчета идентификационных признаков (БОП), представляющих собой геометрические признаки ориентиров и их координаты, блок сравнения идентификационных признаков ориентиров (БСП), при этом первый вход первого БОП соединен с первым выходом АСН, а второй - с выходом МЛЭ, вход второго БОП соединен с выходом БВГ, первый вход которого соединен со вторым выходом АСН, второй - с выходом ДД, а третий - с выходом ГПО, выход первого БОП соединен с первым входом БСП, выход второго БОП - со вторым входом БСП, а выход ДК - с третьим входом БСП.
| Crawford, A.M | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Two Methods of Bathymetry-Sidescan Sonar Data Comparison for Improved Determination of Sonar Towfish Position | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| DRDC Atlantic) | |||
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| WO 2007022233 A2, 22.02.2007 | |||
| US 7139647 B2, 21.11.2006 | |||
| EP 18911457 A2, 27.02.2008. | |||

