Изобретение относится к гидроакустической навигации подвижных подводных объектов, в которую, наряду с координатами места и элементами движения, включают также и обе координаты по глубине, а именно, расстояние от объектов до дна и глубину их погружения, т.е. расстояние до поверхности.
Предмет предлагаемого изобретения, а именно, средство оперативного измерения глубины погружения подвижного подводного объекта и расстояния его до дна, довольно широко представлен устройствами различного типа для обеих указанных групп, общей особенностью которых является индивидуальное конструктивное исполнение каждого из типов при полном отсутствии общих элементов в разных группах.
Так, например, измерение расстояния до дна от погруженного подводного объекта Нд производят с помощью устройств, называемых эхолотами, в названии которых заложен принцип их действия, а именно, излучение в сторону дна ультразвукового импульса и фиксирование времени его распространения до дна и обратно, с последующим вычислением измеряемой величины Нд в соответствии с алгоритмом  , где τ - суммарное время распространения сигнала от антенны, устанавливаемой обычно в нижней части объекта, до дна и обратно со скоростью сзв [1].
, где τ - суммарное время распространения сигнала от антенны, устанавливаемой обычно в нижней части объекта, до дна и обратно со скоростью сзв [1].
Устройства измерения глубины погружения объекта Нпогр, представлены в основном механическими глубиномерами, чувствительным элементом которых являются датчики статического давления Рст на данной глубине (включая и атмосферное) и функционирующими в соответствии с алгоритмом Нпогр=10(Рст-1), в котором значение глубины получают в метрах, если значение давления представлено в атмосферах. В качестве датчиков давления наиболее широко известно использование спиральной трубки Бурдона, а также устройств с применением диафрагм и капилляров [2]. Среди устройств с гидроакустическим принципом измерения глубины известны т.н. эхоледомеры [3], гидроакустическая антенна которых, в отличие от эхолотов, устанавливается в верхней части объектов и ориентирована своим излучением вверх, перпендикулярно к поверхности.
Как нетрудно заметить, очень близкие по физической сущности величины, а именно, глубина под килем и глубина погружения подводных объектов, измеряются различными как по контролируемым параметрам (статическое гидроакустическое давление и временной интервал), так и по техническим средствам их измерения (механические и электронные устройства).
Этот недостаток может быть устранен разработкой гидроакустического устройства, с помощью которого обе координаты измеряются посредством контроля двух параметров: во-первых, временного интервала (как и в эхолоте) и, во-вторых, параметра, характеризующего изменение свойств электроакустических преобразователей (в данном случае излучателей) с изменением глубины. В качестве прототипа изобретения выбран тракт излучения гидроакустических сигналов [4], имеющий в своем составе фазометрическое устройство, позволяющее контролировать момент наступления и степень развития кавитации электроакустических излучателей антенны по соотношению значений активной и раактивной составляющих комплексного сопротивления излучения. Это соотношение определяется изменением величины реактивной его составляющей, сопровождающим явление кавитации.
Техническим результатом предлагаемого изобретения является совмещение функций измерения двух означенных выше координат по глубине относительно дна и поверхности водной среды в одном устройстве. Не менее значимым техническим результатом в данном случае является и существенное конструктивное упрощение устройств, применяемых для решения аналогичных задач, за счет комплексирования двух приборов в одном. Кроме этого, представляемый в электронном (цифровом) виде результат измерений может непосредственно восприниматься и использоваться по назначению в реальном масштабе времени различными потребителями информации.
Указанный результат достигается тем, что используется свойство электроакустических излучателей гидроакустических антенн изменять величину активной составляющей своего сопротивления излучения с глубиной, т.е. с изменением статического давления на их поверхность, а, следовательно, и фазовый сдвиг между подводимым к ним напряжением и потребляемым ими током, поэтому выход фазоизмерительного устройства подключен к индикатору глубины погружения антенны или другому устройству, потребляющему информацию, представляемую в значениях глубины.
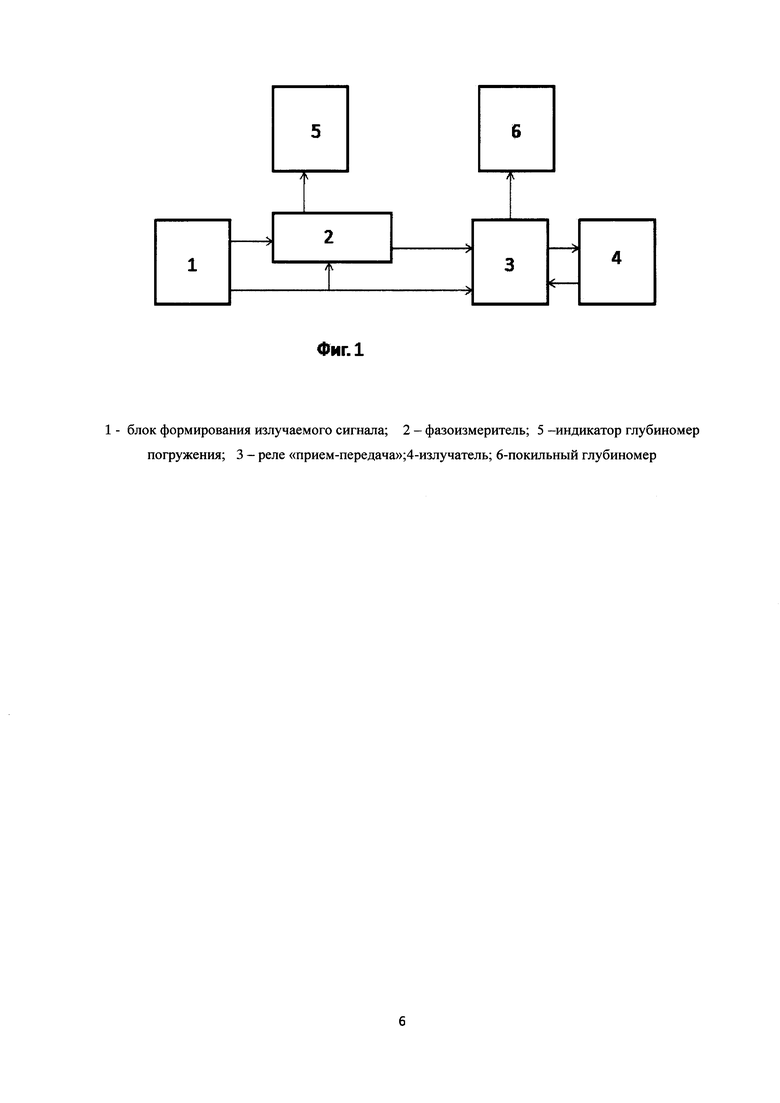
Структурная схема устройства представлена на фиг. 1, где цифрой 1 обозначен ультразвуковой генератор, 2 - фазоизмерительная схема, 3 - переключатель «передача - прием», 4 - приемоизлучающая гидроакустическая антенна, 5 - индикатор глубины погружения носителя эхолота, 6 - приемник отраженного сигнала с индикатором расстояния от носителя до дна. Представляемая индикатором глубина погружения объекта, естественно, должна учитывать вертикальную его протяженность, точнее, расстояние от киля, где расположена антенна, до верхнего обвода корпуса объекта, что реализуется при градуировке шкалы индикатора глубины погружения (глубиномера).
Нетрудно видеть, что функциональное и конструктивное комплексирование состоит в том, что в измерении расстояния до дна (глубины под килем) по схеме эхолота, принимают участие ультразвуковой генератор 1, переключатель режимов прием-передача 3 (в обоих режимах), гидроакустическая антенна 4 и приемник с индикатором глубины под килем 6, а в измерении глубины погружения, т.е. по схеме глубиномера, работают генератор 1, фазоизмерительная схема 2, переключатель режимов прием передача 3 (в режиме излучения), гидроакустическая антенна 4 и индикатор глубины погружения 5.
Сопоставительный анализ предлагаемого устройства с аналогами и прототипом показывает, что оно, во-первых, позволяет решать новую задачу оперативного определения двух координат по глубине (расстояния погруженного подвижного аппарата от поверхности и до дна) одним устройством, в конструкцию которого, во-вторых, включено известное фазометрическое устройство, выходной сигнал которого определяется величиной активной (в отличие от прототипа) составляющей сопротивления излучения, и, наконец, в-третьих, в качестве индикатора глубины погружения подводного аппарата используется электронное устройство.
Источники информации
1 Тракт излучения гидроакустических сигналов. Патент РФ №2353950.
2. Богородский А.В. и др. Гидроакустическая техника исследований и освоения океана. Л: Гидрометеоиздат. 1989.
3. Патент РФ №1818606.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения поправок к глубинам, измеренным однолучевым эхолотом при съёмке рельефа дна акватории, и устройство для его осуществления | 2017 |
|
RU2649027C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| Устройство для съемки подводной поверхности айсберга | 2021 |
|
RU2771434C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| МНОГОЧАСТОТНЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2017 |
|
RU2689998C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ ПОДГОТОВКИ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2011 |
|
RU2464205C1 |
Изобретение относится к гидроакустической навигации подвижных подводных объектов, к которой, наряду с координатами места и элементами движения, относят также и обе координаты по глубине, а именно глубину их погружения и расстояние до дна с последующим обеспечением отображения этих пространственных координат и их динамики на индикаторах информационно-управляющих систем. Техническим результатом предлагаемого изобретения является совмещение устройств для измерения двух координат по глубине нахождения подвижного подводного объекта в водной среде, а именно расстояний от поверхности и дна, в одном устройстве. Не менее значимым техническим результатом в данном случае является и существенное конструктивное упрощение устройств, применяемых для решения аналогичных задач, за счет комплексирования двух функций в одном устройстве. Кроме этого, представляемый в электронном (цифровом) виде результат измерений может непосредственно восприниматься и использоваться по назначению в реальном масштабе времени различными потребителями информации по положению подводного объекта относительно дна и поверхности. Указанный результат достигается тем, что выход фазоизмерительного устройства, включенного в тракт излучения, как чувствительного к глубине погружения объекта и связанного с ней соотношением значений активной и пассивной составляющих сопротивления излучения электроакустических преобразователей, подключен к индикатору или другому устройству, потребляющему электронную информацию, представляемую в значениях глубины погружения. Сопоставительный анализ предлагаемого устройства с аналогами и прототипом показывает, что данное устройство, во-первых, позволяет решать новую задачу оперативного определения двух координат по глубине (расстояний погруженного подвижного аппарата от поверхности и дна или глубину погружения и глубину под килем), во-вторых, содержит в своем составе известное фазометрическое устройство, выполняющее новую функцию чувствительного к глубине погружения элемента без выноса последнего в забортное пространство, и, наконец, в-третьих, оперативно выдает потребителям информацию и по глубинам погружения и под килем в электронном виде. 1 ил.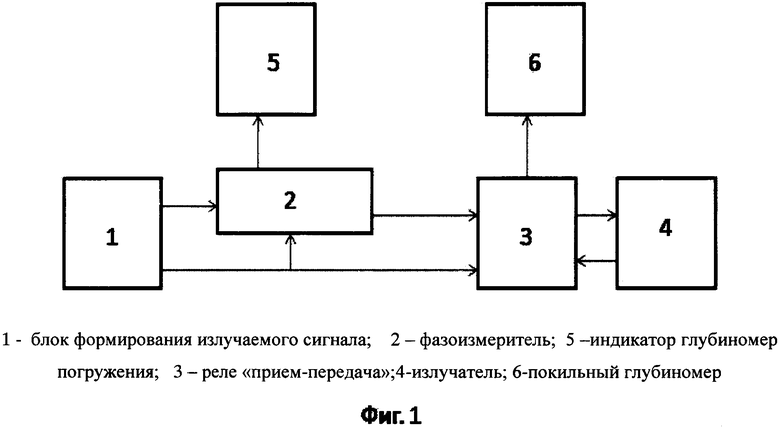
Двухкоординатный эхолот для подводных подвижных объектов, включающий приемоизлучающую гидроакустическую антенну, установленную в нижней (килевой) части объекта и ориентированную характеристикой направленности в сторону дна, тракт излучения с включенным в его состав фазоизмерительным устройством, один вход которого подключен параллельно излучателям антенны, а второй - последовательно им, а также тракт приема сигналов с подключением к его выходу индикатора глубины под килем объекта, отличающийся тем, что выход фазоизмерительного устройства подключен к электронному индикатору, отградуированному в значениях глубины погружения объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ СОСТОЯНИЯ СРЕДЫ | 1991 |
|
RU2029265C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 1992 |
|
RU2039366C1 |
| US 20160259049 A1, 08.09.2016. | |||

