Предлагаемое устройство относится к области медицинской техники и, в частности, к устройствам для физиологической реабилитации после инсульта (при спазмировании или парезе верхних конечностей), травм, хирургических и нейрохирургических операций, а также при других причинах нарушения двигательной активности кисти и пальцев рук. Устройство может быть использовано также в качестве тренажера, массажера, автономно либо в составе комплекса со стационарным или мобильным компьютером.
В настоящее время в общей структуре заболеваний сердечнососудистой системы нарушения мозгового кровообращения отличаются наиболее тяжелыми медицинскими, социальными и экономическими последствиями. Одной из основных причин утраты трудоспособности является инсульт, последствием которого являются нарушения движения пальцев рук. Для восстановления подвижности суставов пальцев рук после инсульта используют так называемый метод непрерывных пассивных движений (СРМ-терапия), в основе которого лежит механотерапия с применением специальной робототехники. СРМ-терапия заключается в следующем: за счет дозированного растяжения тканей в условиях мышечного расслабления достигается подвижность в суставе. СРМ-терапия способствует ускорению восстановления собственных движений в пораженной конечности, облегчению боли, снятию отеков, профилактике образования контрактур и тромбоза и др. заболеваний.
При восстановлении после травмы или операции на кисти руки также необходимо обеспечить большой объем движений в восстанавливаемой конечности. Обеспечение подвижности кисти в необходимом объеме и с необходимыми углами сгибания пальцев в первые 14 дней после операции или в период восстановления после травм позволяет вернуть объем движений в кисти в полном объеме как это было до момента травмы или операции. Важное условие успешного восстановления - работа с пальцами с максимальной для конкретного пациента траекторией перемещения пальцев, поскольку при неполной амплитуде массажа восстановление может быть не полным, только в пределах амплитуды массажа, причем для разных пальцев эта траектория будет разной, в силу различной длины пальцев. Для достижения максимального эффекта желательно проводить как активную реабилитацию - массаж, так и пассивную, когда пациент сам старается двигать пальцами, а устройство используется как тренажер с изменяемой и измеряемой силой сопротивления. Также важна при проведении массажа как можно более постоянная сила воздействия на пальцы, чтобы не повредить кости или суставы при излишнем усилии, в то же время усилие должно быть достаточным для приведения пальцев в движение.
Известно реабилитационно-массажное устройство для кисти и пальцев рук (патент DE 202016000944 (U1), МПК А61Н 1/02, опуб. 2016-06-16), содержащее основание с блоком фиксации руки, на котором закреплены механизм привода пальцев в движение, выполненные с возможностью крепления на средних суставах каждого пальца, в виде каретки, соединенной через рычаги с креплениями. При работе устройства движения пальцев, определяемые креплением, имеют только одну траекторию, определяемую кривизной направляющей. Для рук с разной длиной пальцев нужно менять механизм направляющей и каретки, так как крепление обязательно должно быть расположено на среднем суставе пальца.
Однако данное устройство обладает лишь ограниченной траекторией движения пальца при использовании его для реабилитации, требует подбора механизма направляющей и каретки для рук различных размеров и ограничено использованием только для реабилитации движения кистей рук и пальцев только с помощью массажа, без возможности использовать устройство как тренажер.
Известно также реабилитационно-массажное устройство для кисти и пальцев рук (Заявка на патент US 20130072829 А1 МПК А61Н 99/00, опуб. 2013-03-21), представляющее собой основание в виде скобы, с креплением для руки, причем на основании установлены 4 линейных привода, а привод пальцев в движение осуществляется с помощью 4 гибких связей с наперстками, надетыми на кончики пальцев, с промежуточной фиксацией петлями гибких связей на суставах, причем петли зафиксированы па модульной перчатке. Сила, двигающая палец через наперстки, практически равна силе, действующей на гибкие стержни со стороны привода. Для каждого пальца можно реализовать свою амплитуду движения по неизменной траектории.
Однако, траектория массажа в известном приборе ограничена одномерной кривой движения наперстков, и в том числе гибкостью суставов пальца. Если сустав не гнется, то будут сгибаться другие суставы, и цель массажа не будет достигнута. Устройство также очень критично как к длине пальцев, так и к ширине ладони - даже при небольшом отличии длины пальцев прибор нужно будет перестраивать, а модульная перчатка не подойдет к более широкой или более узкой ладони.
Известно принятое за прототип реабилитационно-массажное устройство для кисти и пальцев рук, содержащее основание с блоком фиксации руки, на котором закреплен механизм привода пальцев в движение, содержащий крепление для кончиков пальцев. Механизм привода пальцев в движение состоит из электродвигателя и системы шестеренчатых редукторов и рычагов, причем ось последнего рычага соединена упругими тягами с креплением для пальцев. Таким образом, электродвигатель через систему редукторов рычагов и упругие тяги приводит в движение кончики пальцев пациента, осуществляя только принудительный массаж, причем движение для всех пальцев сразу определяется движением одной оси - оси последнего рычага. (Патент US 5697892 (А), МПК А61Н 1/02, опуб. 1997-12-16).
Однако, сложная кинематическая схема не позволяет ограничивать или делать постоянным силу, приводящую пальцы в движение, что необходимо для безопасности работы устройства.. Применение устройства ограничено использованием его как массажера и одномерной криволинейной траекторией движения пальцев, что не является оптимальным для реабилитации.
Предлагаемое изобретение решает задачу создания более простого и универсального устройства, позволяющего расширить область применения устройства совместив нем различные функции реабилитационного устройства - как тренажера, так и массажного устройства, обеспечить работу с заданным усилием, а также с заранее заданной пассивной нагрузкой, с независимой многомерной траекторией для каждого пальца, включая большой, обеспечивая анализ, просмотр и запись параметров сеанса, и кроме того повысить его безопасность.
Поставленная задача решается реабилитационно-массажным устройством для кисти и пальцев рук, содержащем основание с блоком фиксации руки, на котором закреплены механизм привода пальцев в движение, содержащий крепление для кончиков пальцев, новизна которого заключается в том, что механизм привода пальца в движение содержит, по крайней мере, один плоский пятизвенный шарнирный механизм, в центральном шарнирном узле которого расположено крепление для кончиков пальцев, каждое нижнее звено жестко связано с валом электропривода вращения, закрепленного рядом с ним на основании и независимо соединенного с электронным блоком управления, причем пятизвенный шарнирный механизм установлен с возможностью совпадения его плоскости с физиологической плоскостью движения массируемого пальца.
Для работы с пальцами всей руки механизм привода пальцев в движение содержит пять пятизвенных механизмов, установленных таким образом, что их плоскости совпадают с физиологической плоскостью движения каждого пальца.
Для работы как с правой, так и с левой рукой устройство дополнительно содержит шестой пятизвенный шарнирный механизм, установленный таким образом, что плоскости крайних пятизвенных механизмов совпадают с физиологической плоскостью движения больших пальцев обеих рук.
Для безопасной работы реабилитационно-массажного устройства крепление для кончиков пальцев снабжено предохранителем-защелкой.
Для работы с заданным усилием реабилитационно-массажное устройство дополнительно содержит датчики тока электроприводов вращения, размещенные в цепи их питания.
Для использования заявляемого устройства в том числе и как тренажера, в качестве электроприводов вращения используют обратимые электроприводы.
Для анализа, просмотра и записи параметров сеанса работы реабилитационно-массажного устройства электронный блок управления выполнен с возможностью соединения с индикатором и/или компьютером.
Плоский пятизвенный шарнирный механизм может быть выполнен с любой длиной стойки, образованной осями электроприводов вращения, в том числе и с длиной стойки, равной нулю.
Технический результат выражается в осуществлении реабилитации верхних конечностей больного с возможностью как активной, так и пассивной реабилитации, осуществляемой с максимальной безопасностью, приводящей к быстрейшему его выздоровлению, восстановлению подвижности суставов и в общем всей нервной системы от мозга до мышц, приводя также к ускорению лечения, облегчению болей, снятию отеков, профилактике контрактур и тромбоза. Также устройство подходит для восстановления больных после тяжелых травм (переломов) и нейрохирургических операций как в домашних условиях, так и в медицинских стационарах.
Настоящее изобретение поясняется чертежами, пример выполнения реабилитационно-массажного устройства на которых, однако, не является единственно возможным, но наглядно демонстрируют возможность достижения заявленного технического результата.
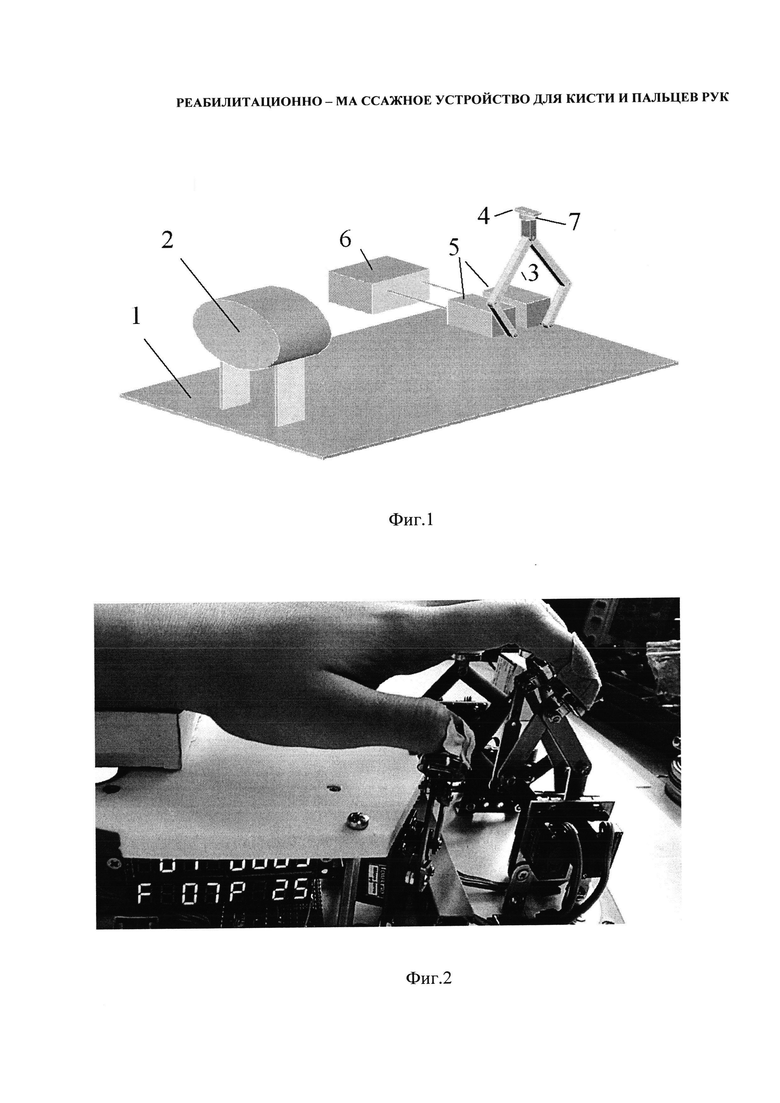
На Фиг. 1, приведена диметрическая проекция реабилитационно-массажного устройства для кисти и пальцев рук с механизмом привода пальца в движение, содержащим один плоский пятизвенный шарнирный механизм.
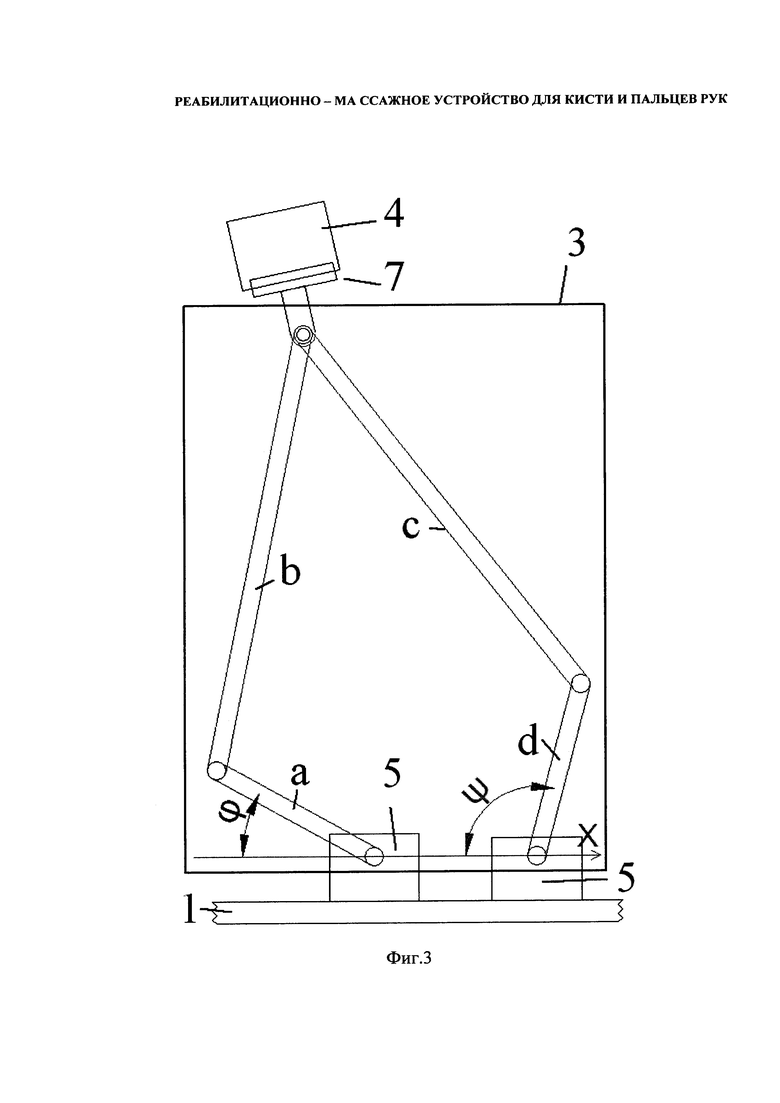
На Фиг. 2 представлено фото реабилитационно-массажного устройства для кисти и пальцев рук в процессе работы с пятью пальцами.
На Фиг. 3, приведен вид на устройство в плоскости пятизвенного шарнирного механизма (механизм обведен рамкой), крепление руки и блок управления не показаны.
Реабилитационно-массажное устройство для кисти и пальцев рук (Фиг. 1, Фиг. 3), содержит основание 1 с блоком фиксации руки 2 и механизм привода пальца в движение, содержащий плоский пятизвенный шарнирный механизм 3, в центральном шарнирном узле которого расположено крепление для кончиков пальцев 4, а каждое нижнее звено a и d (Фиг. 3), жестко связано с валом электропривода вращения 5, закрепленного рядом с ним на основании 1 и независимо соединенного с электронным блоком управления 6, причем пятизвенный шарнирный механизм 3 установлен с возможностью совпадения его плоскости с физиологической плоскостью движения массируемого пальца.
Устройство может быть выполнено с механизмом привода пальцев в движение, содержащем как пять плоских пятизвенных шарнирных механизмов, установленных таким образом, что их плоскости совпадает с физиологической плоскостью движения каждого пальца (Фиг. 2), так и шесть, причем шестой пятизвенный шарнирный механизм установлен таким образом, что плоскости крайних пятизвенных механизмов, совпадают с физиологической плоскостью движения больших пальцев обеих рук. Для безопасной работы реабилитационно-массажного устройства крепление 4 для кончиков пальцев может быть снабжено предохранителем-защелкой 7 (Фиг. 1, Фиг. 3). Для работы с заданным усилием реабилитационно-массажное устройство может дополнительно содержать датчики тока электроприводов вращения, размещенные в цепи их питания (На Фиг. не указаны), в качестве электроприводов вращения для использования заявляемого устройства в том числе и как тренажера, берут обратимые электроприводы. Для анализа, просмотра и записи параметров сеанса работы реабилитационно-массажного устройства электронный блок управления 6 может быть выполнен с возможностью соединения с индикатором и/или компьютером (На Фиг. не указаны). Пятизвенный плоский шарнирный механизм может иметь любую длину стойки, образованной осями электроприводов вращения, в том числе и равную нулю.
Заявляемое устройство работает следующим образом. Руку пациента закрепляют в области запястья матерчатым либо другим мягким фиксатором в блоке фиксации руки 2, закрепленном на основании устройства 1, при этом кончики пальцев пациента через магнитный либо механический предохранитель-защелку 7 размещают в креплении 4, расположенном в центральном шарнирном узле соответствующего плоского пятизвенного шарнирного механизма 3, предварительно установленного таким образом, что его плоскость совпадает с физиологической плоскостью движения массируемого пальца. Шарнирные механизмы приводятся в действие электроприводами вращения 5. В соответствии с указаниями лечащего врача электронный блок управления 6 по заданной программе поворачивает независимо соединенное с ним каждое нижнее звено a и d (Фиг. 3), жестко связанное с валом соответствующего ему электропривода вращения 5, на заданные углы ϕ и ψ относительно оси X так, что повороты валов приводов вращения 5 однозначно определяют положение центрального шарнирного узла механизма и крепления 4. Таким образом, можно реализовать произвольное 2-мерное движение этого узла. Тригонометрический расчет механизма показывает, что сила привода пальцев в движение практически не зависит от углов поворота электроприводов, это большой плюс. Возможно управление силой перемещения, вплоть до нулевой, что позволяет использовать прибор и как частично или полностью пассивный, следующим образом: отработав массаж с номинальной силой, действующей на пальцы, можно понемногу уменьшать эту силу с таким расчетом, что после частично восстановленной моторики пальцы пациента будут активно участвовать в движении. Такое уменьшение силы электроприводов можно довести вплоть до полного уменьшения, превратив прибор в полностью пассивный тренажер-пациент будет двигать пальцами, вращая таким образом через 5-звенные механизмы валы электроприводов, при этом электроприводы должны быть обратимыми. Оборудовав прибор датчиками тока, мы можем измерять скорость движения пальцев пациента по вырабатываемому электроприводами 5 (они будут принудительно вращаться) напряжению.
Устройство позволяет включать массаж не для всех пальцев, если это необходимо, а также производить произвольное движение для любого пальца по любой траектории, задаваемой блоком управления 6.
Принудительный массаж пальцев с фиксацией кисти производит как релаксацию мышц, так и генерацию огромного количества нервных импульсов, что способствует регенерации нервных связей мозга при потере управляемости мышцами при инсульте или повреждении мозга. Также прибор полезен при реабилитации после хирургических или нейрохирургических операций как замена дорогостоящих услуг специалиста-массажера. В пассивном режиме прибор может использоваться для регистрации движения пальцев, измерители тока будут давать сигнал, определяемый скоростью движения пальцев пациента.
Таким образом применение предлагаемого изобретения позволит осуществить поставленные задачи:
- создания более простого устройства за счет приведения пальцев в движение простой конструкцией плоского 5-звенного механизма;
- универсальностью устройства за счет расширения области применения, совместив нем различные функции реабилитационного устройства - как тренажера, так и массажного устройства путем применения обратимого электропривода вращения;
- обеспечения работы с заданным усилием, достаточным для перемещения кончика пальцев и сгибания суставов, но не приводящим к переломам или вывихам, за счет практически неизменной силы перемещения пальцев при заданном моменте электропривода вращения, причем момент можно контролировать электронным блоком управления, а также с заранее заданной величиной пассивной нагрузки, постоянной на всей амплитуде движения пальца, причем это постоянство особенно важно на начальном этапе реабилитации.
- получить независимую двумерную траекторию для каждого пальца, включая большой, что важно поскольку пальцы имеют разную длину и разную амплитуду движения, а для максимального лечебного эффекта лучше осуществлять движение на всю возможную амплитуду, разную для разных пальцев.
- обеспечить анализ, просмотр и запись параметров сеанса, применив датчики тока электроприводов вращения
- повысить безопасность прибора реабилитации, применив предохранители в виде механических или магнитных защелок крепления пальца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для растяжения соединений костей ног и позвоночника человека | 2020 |
|
RU2773794C1 |
| Способ персонализированной физической реабилитации больных с двигательными нарушениями лучезапястных суставов и пальцев кисти | 2020 |
|
RU2739699C1 |
| МЕХАНОТЕРАПЕВТИЧЕСКИЙ АППАРАТ ДЛЯ КИСТИ | 1991 |
|
RU2033128C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ МЕХАНОТЕРАПИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2023 |
|
RU2802462C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ В ВИДЕ СПАСТИЧЕСКОЙ ДИПЛЕГИИ | 2014 |
|
RU2571528C2 |
| Способ реабилитации пациентов после оперативного лечения по поводу синдрома карпального канала | 2024 |
|
RU2827528C1 |
| Способ комплексной медицинской реабилитации пациентов, перенесших хирургическую вентральную фиксацию сегментов шейного отдела позвоночника | 2024 |
|
RU2834844C1 |
Изобретение относится к области медицинской техники и, в частности, к устройствам для физиологической реабилитации после инсульта при спазмировании или парезе верхних конечностей, травм, хирургических и нейрохирургических операций, а также при других причинах нарушения двигательной активности кисти и пальцев рук. Устройство может быть использовано также в качестве тренажера, массажера, автономно либо в составе комплекса со стационарным или мобильным компьютером. Реабилитационно-массажное устройство для кисти и пальцев рук содержит основание с блоком фиксации руки и механизм привода пальца в движение, содержащий крепление для кончика пальцев. Механизм привода пальца в движение содержит пять плоских пятизвенных шарнирных механизмов, установленных таким образом, что их плоскости совпадают с физиологической плоскостью движения каждого пальца руки. Механизм привода одного пальца в движение содержит один плоский пятизвенный шарнирный механизм, в центральном шарнирном узле которого расположено крепление для кончика пальцев, а каждое нижнее звено жестко связано с валом электропривода вращения, закрепленного рядом с ним на основании и независимо соединенного с электронным блоком управления. Изобретение позволяет совместить функции тренажера и массажера в одном устройстве. 5 з.п. ф-лы, 3 ил.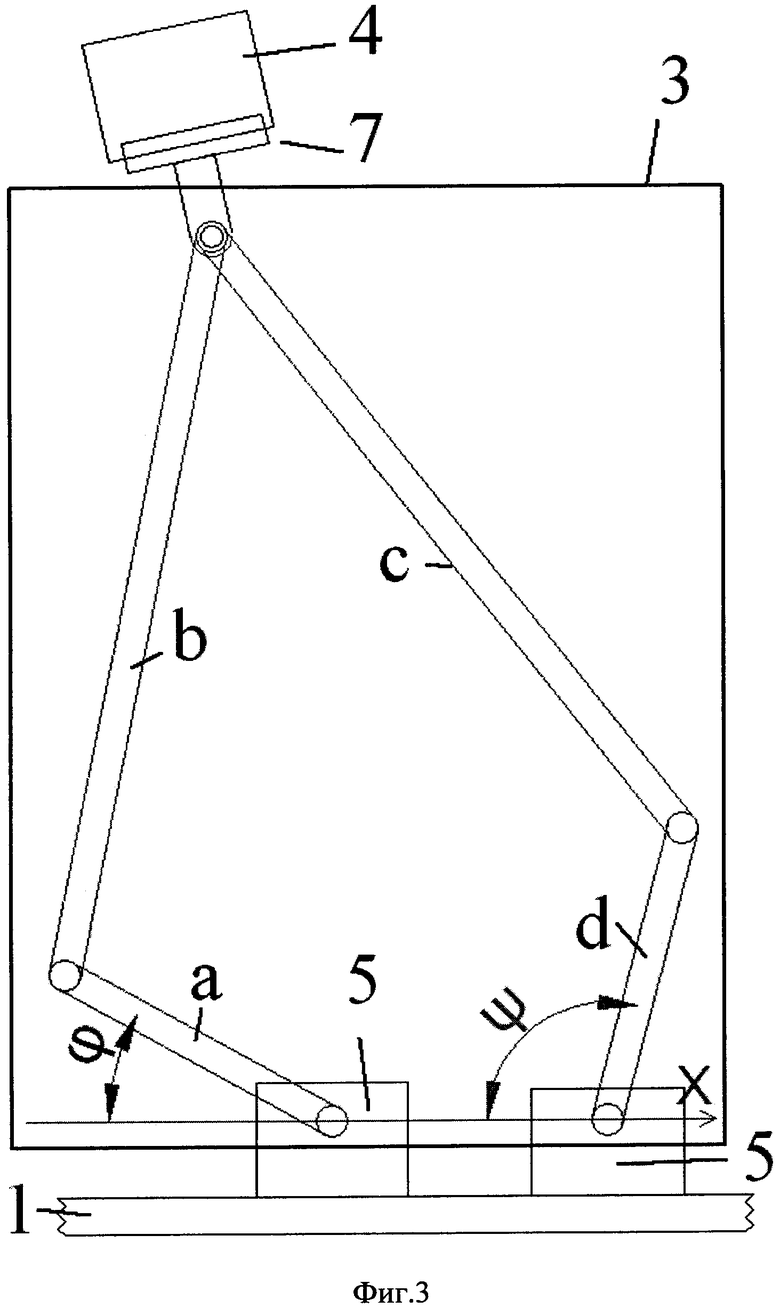
1. Реабилитационно-массажное устройство для кисти и пальцев рук, содержащее основание с блоком фиксации руки и механизм привода пальца в движение, содержащий крепление для кончика пальцев, отличающийся тем, что механизм привода пальца в движение содержит пять плоских пятизвенных шарнирных механизмов, установленных таким образом, что их плоскости совпадают с физиологической плоскостью движения каждого пальца руки, при этом механизм привода одного пальца в движение содержит один плоский пятизвенный шарнирный механизм, в центральном шарнирном узле которого расположено крепление для кончика пальцев, а каждое нижнее звено жестко связано с валом электропривода вращения, закрепленного рядом с ним на основании и независимо соединенного с электронным блоком управления.
2. Устройство по п. 1, отличающееся тем, что для работы как с правой, так и с левой рукой оно дополнительно содержит шестой пятизвенный шарнирный механизм, установленный таким образом, что плоскости крайних пятизвенных шарнирных механизмов совпадают с физиологической плоскостью движения больших пальцев обеих рук.
3. Устройство по п. 1, отличающееся тем, что для безопасной работы реабилитационно-массажного устройства крепление для кончиков пальцев снабжено предохранителем- защелкой.
4. Устройство по п. 1, отличающееся тем, что для работы с заданным усилием реабилитационно-массажное устройство дополнительно содержит датчики тока электроприводов вращения, размещенные в цепи их питания.
5. Устройство по п. 1, отличающееся тем, что для использования его в том числе и как тренажера в качестве электроприводов вращения используют обратимые электроприводы.
6. Устройство по п. 1, отличающееся тем, что для анализа, просмотра и записи параметров сеанса работы реабилитационно-массажного устройства электронный блок управления выполнен с возможностью соединения с индикатором и/или компьютером.
| 0 |
|
SU175324A1 | |
| МЕХАНИЗМ ДЛЯ КОНТРОЛЯ И ПОДАЧИ ШПУЛЬ В ГНЕЗДА ГОРИЗОНТАЛЬНОГО ТРАНСПОРТЕРА УТОЧНО-ПЕРЕМОТОЧНОГО АВТОМАТА | 0 |
|
SU175854A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 5451191 A1, 19.09.1995 | |||
| CN 102579227 A, 18.07.2012. | |||

