Уровень техники
Известны различные функции обучения, регулирования и коррекции, контролирующие в механических транспортных средствах работу систем и компонентов во время движения и оказывающие корректирующее воздействие в случае какого-либо отклонения. Так, например, из публикации DE 4319677 известны способ и устройство для регулирования плавности работы двигателя внутреннего сгорания. В известном устройстве с каждым цилиндром двигателя внутреннего сгорания связан блок регулирования, который в зависимости от величины отклонения сопоставленного ему регулируемого параметра от заданного значения образует управляющий параметр для соответствующего регулятора. Отклонение регулируемого параметра от заданного значения определяется из фактического и заданного значений, относящихся к конкретному отдельному цилиндру.
Подобный метод позволяет компенсировать производственные допуски и изменения времени прохождения сигналов в транспортном средстве. Тем самым обеспечивается удержание на низком уровне производственных издержек и повышение комфортабельности езды. Указанные функции представляют собой, как правило, одну из составных частей системного программного обеспечения и поэтому встраиваются производителями транспортных средств в блоки управления последних до начала процесса производства этих транспортных средств. В случае сервисного обслуживания значения коррекции можно использовать для функций обучения, регулирования и коррекции с целью проведения диагностики систем или компонентов транспортного средства в условиях станций технического обслуживания.
Наряду с этим, известны применения в области телематики, обеспечивающие возможность непрерывной или периодической передачи данных между транспортным средством и его изготовителем или сервисной организацией либо третьим лицом.
Если значения коррекции, получаемые в случае известных функций обучения, регулирования и коррекции, превышают определенное значение, то инициируются соответствующие мероприятия. Известные функции обычно реагируют лишь в том случае, если происходит превышение предельно допустимой токсичности выхлопа или выход за пределы регулирования. При этом речь идет о реактивной диагностике, то есть водитель транспортного средства замечает симптом по загоранию предупредительного индикатора или сталкивается с "замещающей" реакцией транспортного средства, такой как переключение на движение в аварийном режиме, либо даже с полным выходом транспортного средства из строя, что, как правило, застает водителя врасплох.
В промышленной сфере подобный выход транспортных средств из строя очень часто приводит к высоким прямым и косвенным затратам. Это относится, например, к транспортным средствам, используемым в строительной или горнорудной промышленности.
Раскрытие изобретения
Предлагаемые в изобретении устройство и способ с признаками, указанными в независимых пунктах формулы, обладают по сравнению с описанным выше уровнем техники тем преимуществом, что позволяют избежать неожиданного выхода транспортного средства из строя благодаря своевременному предупреждению. В частности, поступает своевременное предупреждение водителю или эксплуатанту транспортного средства, что позволяет им своевременно принять соответствующие меры.
В соответствии с изобретением осуществляется определение значений коррекции посредством функции коррекции. Выполняется построение (запись) кривой значений коррекции и ее экстраполяция. Исходя из экстраполированных значений коррекции, прогнозируют возникновение ошибки, или неисправности. Для экстраполяции может использоваться любой метод. Предпочтительной является линейная экстраполяция.
Существенным с точки зрения настоящего изобретения является по меньшей мере частичное осуществление способа вне транспортного средства, в центральном устройстве, в частности в "облаке". Это особенно выгодно в случае осуществления контроля нескольких транспортных средств. Такая ситуация возможна, например, в парке транспортных средств автобусного предприятия или транспортно-экспедиционного агентства. Это также предпочтительно при осуществлении контроля нескольких транспортных средств одного предприятия, эксплуатируемых на каменном карьере или руднике. В этих случаях индикация будущей ошибки осуществляется не для водителя или не только для водителя, но и для эксплуатанта данного транспортного средства. Тем самым обеспечивается возможность предотвращения неожиданного выхода транспортного средства из строя и своевременной его подачи на техническое обслуживание.
При этом особенно предпочтительно определять момент времени, в который предположительно возникнет ошибка. Это означает, что водитель или эксплуатант получает сигнал, информирующий о предполагаемом моменте возникновения ошибки. Здесь может быть предусмотрена индикация отрезка пути и/или времени, оставшегося до возникновения ошибки.
Особенно предпочтительно сигнализировать о том, когда экстраполированные значения коррекции превысят пороговое значение. Превышение порогового значения проверяется блоком управления в соответствии с известным уровнем техники. При превышении порогового значения водителю поступает сигнал об ошибке, и инициируются соответствующие мероприятия. Благодаря такому контролю момента превышения экстраполированным значением коррекции порогового значения можно заблаговременно получить информацию о предполагаемом моменте возникновения ошибки.
Об этом целесообразно сообщать за определенное время до достижения порогового значения. Это означает, что за определенный промежуток времени А до превышения порогового значения водитель или эксплуатант получает соответствующее сообщение. Этот промежуток времени А предпочтительно выбирать таким образом, чтобы он был более длительным, чем интервал технического обслуживания. Кроме того, этот промежуток времени А может выбираться таким образом, чтобы можно было доехать еще до одной станции технического обслуживания. В частности, в случае транспортных средств, регулярно проезжающих одно и то же расстояние, это время выбирается таким образом, чтобы эти транспортные средства могли доехать до станции технического обслуживания. Это выгодно, в частности, в случае маршрутных автобусов, транспортных средств, принадлежащих транспортно-экспедиционным агентствам, или транспортных средств, используемых на рудниках или каменных карьерах.
Если известно среднее расстояние, проходимое транспортным средством за определенное время, то это расстояние можно использовать вместо промежутка времени. Это целесообразно, в частности, в случае транспортных средств, которые всегда преодолевают одни и те же или сравнимые расстояния либо движутся в пределах определенного маршрута вокруг станции технического обслуживания.
Благодаря тому, что экстраполяция кривой значений коррекции выполняется лишь в случае, если значения коррекции находятся за пределами допустимого диапазона, можно снизить сложность операций, выполняемых в блоке управления. Кроме того, точность экстраполяции повышается при значительном повышении значений коррекции.
Еще одним объектом изобретения является программный код вместе с командами обработки для составления компьютерной программы, выполняемой в блоке управления, в частности исходный код с командами компиляции и/или компоновки, причем программный код при его преобразовании в выполняемую компьютерную программу в соответствии с командами обработки приводит к получению компьютерной программы для осуществления всех шагов описанного способа. Этот программный код может быть, в частности, задан исходным кодом, который можно, например, загрузить с сервера в Интернете.
Краткое описание чертежей
Примеры осуществления настоящего изобретения представлены на чертежах и более подробно описаны ниже. На чертежах показано:
на фиг. 1 - схематическое изображение,
на фиг. 2 - график зависимости критериев от времени,
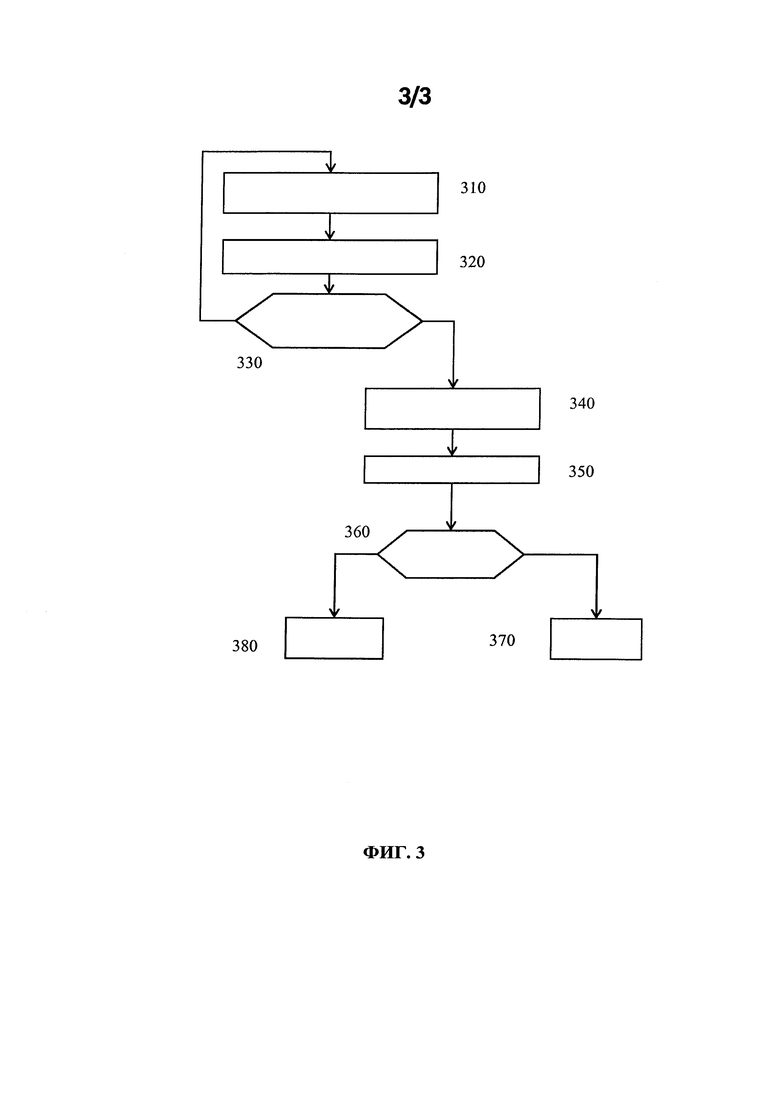
на фиг. 3 - блок-схема.
Описание примеров осуществления изобретения
На фиг. 1 показано устройство для контроля управляющего устройства транспортного средства. Первое транспортное средство обозначено номером 100. Это транспортное средство может, как правило, содержать блок 110 управления. Кроме того, показано другое транспортное средство 120, которое тоже может содержать блок 130 управления. Это транспортное средство 120, или блок 130 управления, передает данные в центральное устройство 140. Последнее выполняет различные вычисления и обменивается данными со средством 150 индикации.
Это центральное устройство можно также назвать ''облаком''. В данном случае речь идет о различных запоминающих и вычислительных устройствах с децентрализованным или централизованным расположением. Так, например, может быть предусмотрено, что запоминающие устройства и вычислительные мощности предоставляются поставщиком услуг, который и обеспечивает проведение вычислений. Средства 150 индикации предпочтительно находятся у владельца или эксплуатанта транспортного средства. Например, может быть предусмотрено, что в транспортно-экспедиционном агентстве эти данные можно скачать из центрального вычислительного устройства и что соответствующие лица имеют доступ к этим данным.
В процессе управления транспортным средством происходит поступление различных данных коррекции. Так, например, из уровня техники известно определение значений коррекции для так называемого регулирования плавности хода. Далее, современные электронные системы управления двигателем оснащены устройством так называемой калибровки нулевого объема. Это устройство калибровки нулевого объема устанавливает продолжительность коррекции регулирования с момента эффективного впрыска топлива. Способ, предлагаемый в настоящем изобретении, может использоваться во всех этих и других устройствах, применяемых в механизме газораспределения или в других системах регулирования двигателей внутреннего сгорания.
На фиг. 2 представлен график зависимости значений коррекции K от времени t. На этом графике через S обозначено пороговое значение. Вплоть до момента времени t0 коррекция K принимает почти постоянное значение. Колебания значений коррекции происходят лишь от измерения к измерению в пределах известной полосы допуска. Видно, что начиная с момента времени t0 происходит медленный рост значений коррекции. Через эти возрастающие значения можно провести прямую линию или, согласно другому методу, экстраполирующую кривую. Эта экстраполирующая кривая пересекает линию порогового значения S в момент времени t2. Из этого момента времени t2 определяется момент времени t1, опережающий момент времени t2 на величину временного промежутка А. Вывод предупреждения происходит к моменту времени t1. Длительность промежутка времени А предпочтительно выбирают таким образом, чтобы она соответствовала периоду, в течение которого обычно выполняется техническое обслуживание данного транспортного средства. Это означает, что промежуток времени А соответствует интервалу технического обслуживания транспортного средства.
Предлагаемый в изобретении способ описан ниже на примере, представленном на фиг. 3. На первом шаге 310 определяются значения коррекции. На втором шаге 320 значения коррекции сохраняются в запоминающем устройстве. На шаге 330 проверяется наличие разброса значений коррекции в пределах некоторого диапазона. Если это имеет место, то программа переходит к шагу 310 и определяются новые значения коррекции. Если разброс значений коррекции превышает ширину диапазона, то на шаге 340 выполняется динамическое вычисление экстраполированных значений. В простейшем случае это осуществляется посредством линейной экстраполяции. Можно, однако, также использовать и любой другой математический алгоритм экстраполяции. На шаге 350 вычисляется точка пересечения экстраполирующей кривой с линией, определяющей предельно-допустимое значение S. В качестве предельно-допустимого значения S могут выступать введенные предельные значения диагностических параметров, предельные значения физических регулировочных параметров функции коррекции или другие предельные значения. На шаге 360 выполняется запрос о времени достижения точки пересечения. В зависимости от результата запроса 360, на шаге 370 выводится сообщение об ошибке или на шаге 380 выводится предупреждение, что данное транспортное средство выйдет из строя через определенное время или определенную длину пробега.
Особенно предпочтительной является по меньшей мере частичная реализация описанного способа в так называемом ''облаке''. Определение значений коррекции на шаге 310 выполняется в блоке 110 управления транспортного средства 100. Затем эти значения коррекции передаются через блок телематики. При этом в качестве блока телематики может использоваться уже имеющийся соответствующий блок грузового транспортного средства, блок Connectivity Control Unit с собственной логической схемой или GSM-модуль в блоке управления. Значения коррекции могут предварительно обрабатываться в транспортном средстве и/или сохраняться в его промежуточном запоминающем устройстве. В центральном устройстве 140 значения коррекции передаются на сервер и предпочтительно сохраняются в банке данных. Оттуда данные поступают в любые аппаратные средства, с помощью которых реализуются шаги способа, описанные выше. После этого полученные результаты подходящим образом отображаются у пользователя или эксплуатанта транспортного средства.
В альтернативном варианте может быть также предусмотрено, что экстраполяция осуществляется также в блоке 110 управления, а передача данных в центральное устройство происходит только в случае превышения порогового значения.
В другом варианте осуществления изобретения весь способ может быть реализован в блоке управления.
Существенное значение для применения принципов, заложенных в изобретение, имеют функции обучения, регулирования и коррекции. Если эти функции не реализованы и/или не активированы в блоке 130 управления, то в одном из вариантов осуществления изобретения предусматривается возможность их реализации (в условиях контроля, выполняемого нерегулируемым образом и только через определенные интервалы) также и в центральном устройстве 140, то есть в ''облаке''. Это выполняется лишь путем передачи в центральное устройство 140 всех входных сигналов, необходимых для реализации функций обучения, регулирования и коррекции.


Изобретение относится к области техники управления транспортным средством. Техническим результатом является снижение неожиданного выхода из строя транспортного средства на основе своевременного предупреждения водителя. Предложен способ контроля управляющего устройства транспортного средства, в котором определяют значения коррекции посредством функции коррекции, строят кривую значений коррекции и экстраполируют ее и на основании экстраполированных значений коррекции прогнозируют ошибку или неисправность. 3 н. и 4 з.п. ф-лы, 3 ил. 
1. Способ контроля управляющего устройства транспортного средства, характеризующийся тем, что определяют значения коррекции посредством функции коррекции, строят кривую значений коррекции, экстраполируют кривую значений коррекции и на основании экстраполированных значений коррекции прогнозируют ошибку, причем способ осуществляют, по меньшей мере частично, вне транспортного средства в центральном устройстве (140).
2. Способ по п. 1, отличающийся тем, что определяют момент времени, в который предположительно возникнет ошибка.
3. Способ по п. 2, отличающийся тем, что сигнализируют о том, когда экстраполированные значения коррекции превысят пороговое значение.
4. Способ по п. 3, отличающийся тем, что об этом сообщают за определенное время до достижения порогового значения.
5. Способ по п. 1, отличающийся тем, что экстраполяцию кривой значений коррекции выполняют при нахождении значений коррекции за пределами допустимого диапазона.
6. Машиночитаемый носитель информации, в котором записана компьютерная программа, обеспечивающая при ее выполнении осуществление всех шагов способа по одному из пп. 1-5.
7. Блок управления, выполненный с возможностью осуществления всех шагов способа по одному из пп. 1-5.
| US 2006155511 A1, 2006-07-13 | |||
| US 2013261939 A1, 2013-10-03 | |||
| DE 3115404 A1, 1982-11-11 | |||
| Способ получения суспензии углеводородных парафинистых смесей для транспортировки | 1975 |
|
SU612643A3 |
| US 2009138141 A1, 2009-05-28 | |||
| RU 2012116647 A, 2013-11-10 | |||
| FOLLOWELL D | |||
| et al, Implications of an open system approach to vehicle health management, AEROSPACE CONFERENCE, 2004 | |||
| PROCEEDINGS, IEEE, Piscataway, p | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ОЧИСТКИ ОТ НАГАРА ФОРСУНОК В БЕСКОМПРЕССОРНЫХ ДВИГАТЕЛЯХ ВНУТРЕННЕГО ГОРЕНИЯ | 1925 |
|
SU3717A1 |

