1
Изобретение этносится к движителям транспортньк средств высокой проходимости и может быть использовано в качестве движителя планетохода.
Известен к олесн о-шагающий движитель, содержащий систему двух рычагов с опорными колесами на концах, которая поворотно установлена на оси транспортного средства 1 .
При движении транспортное средство
опирается одновременно на два колеса, а при наезде на препятствие вся колесная ситема поворачивается на 180 , что способствует преодолению препятствия.
Недостатком этого движителя является значительный подъем транспортного средства в режиме шагания, что требует больших энергозатрат и создает повышенный перекос корпуса.
Известен также колесно-шагающий движитель, состоящий из трех ходовых колес, расположенных на кондах рычагов, которые жестко соединены друг с другом н могут совместно вращаться вокруг центральной оси. Движитель имеет два раздельных приоод : адин к колесах:; i эбеспечнвзет вра:цэкие р мчагэр ральной D-C;: . J ,Цдь:«ен ; :;э морэт ам ялг; ьерд:-:- :j, нэму грунту DoyjiecTfi HCTcn за счет 1 ::чъшекия кодэзых, колес при блокирэвл1:: i;n;:зоде BpaujeiiHii р1ччагов. Движение по трул-нопро,ход1; ;ыч участкам пути: болота;-.;, глубокой грязи, вэтныл преградам, ivpyiui. - npenHTCTBUvNf прэиовадктсл 1фи;;одоч: ;:тения рь чагоБ вокруг центрально;; Г ,,;гэдаря удсчному сочетанию способю; и по-педвпгаться пп тверд-тм грукты-л, так и по грунтам: с нкзкой Hecxuieii способ ;эстью, этот движитель зарекомендовал себя как двпй-.птель высокой прохидц-мостл.
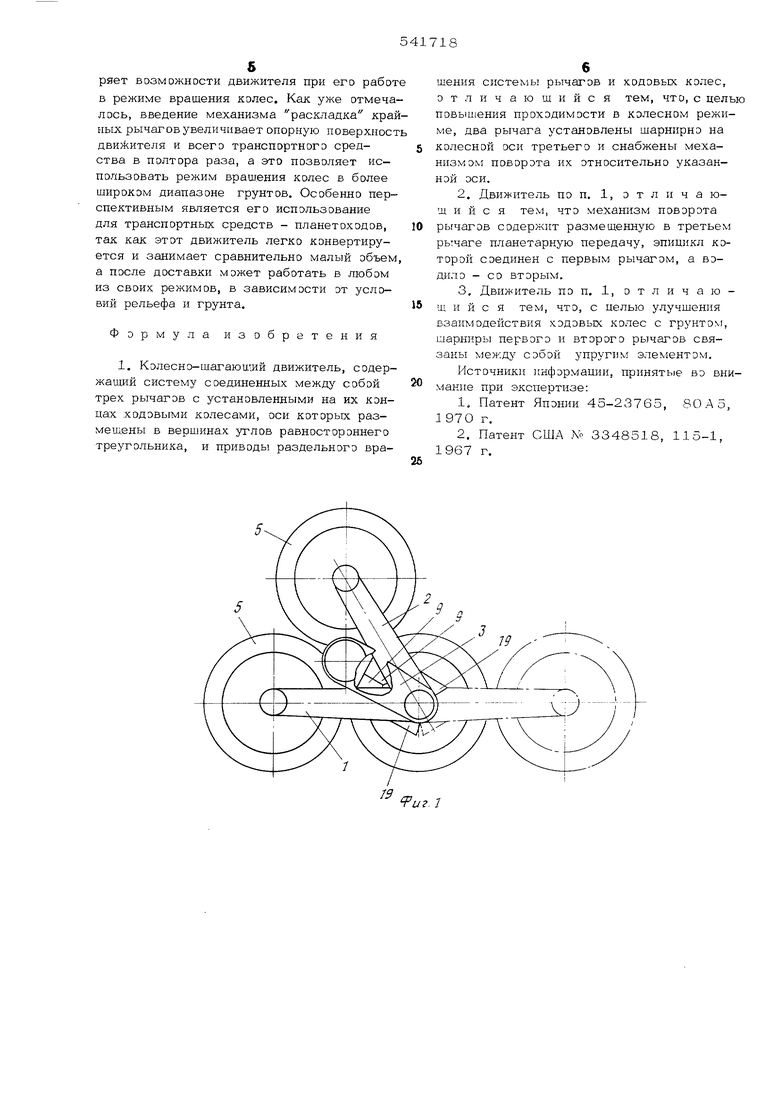
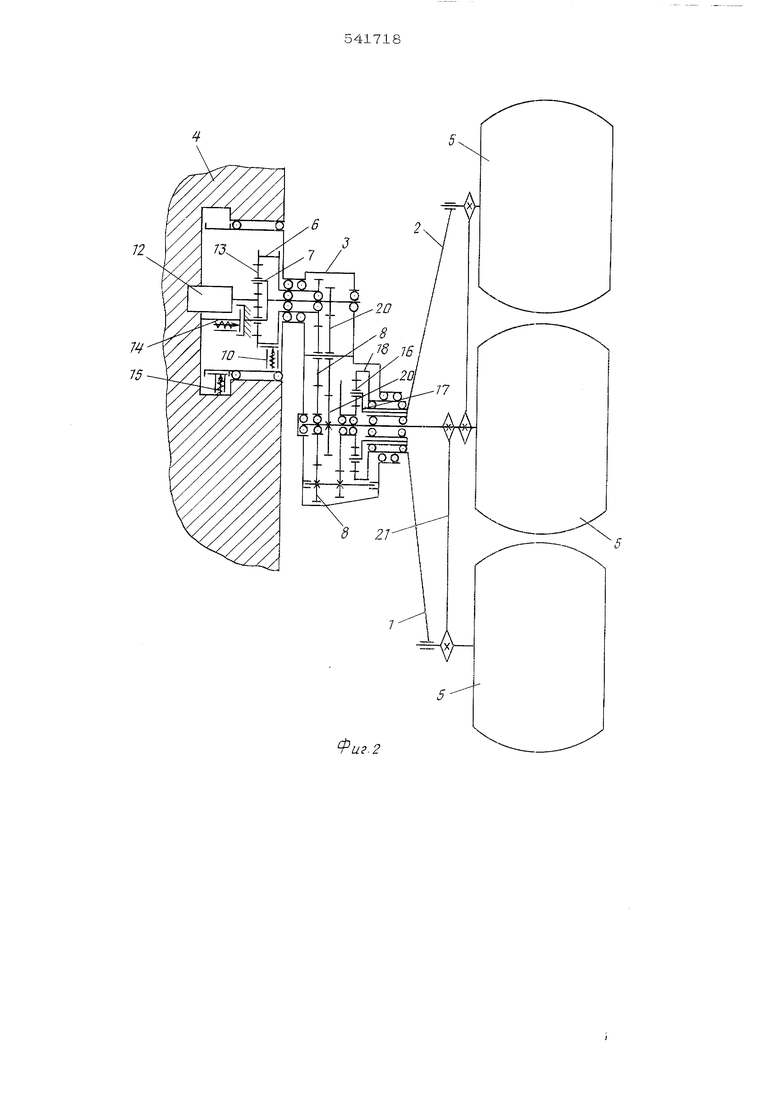
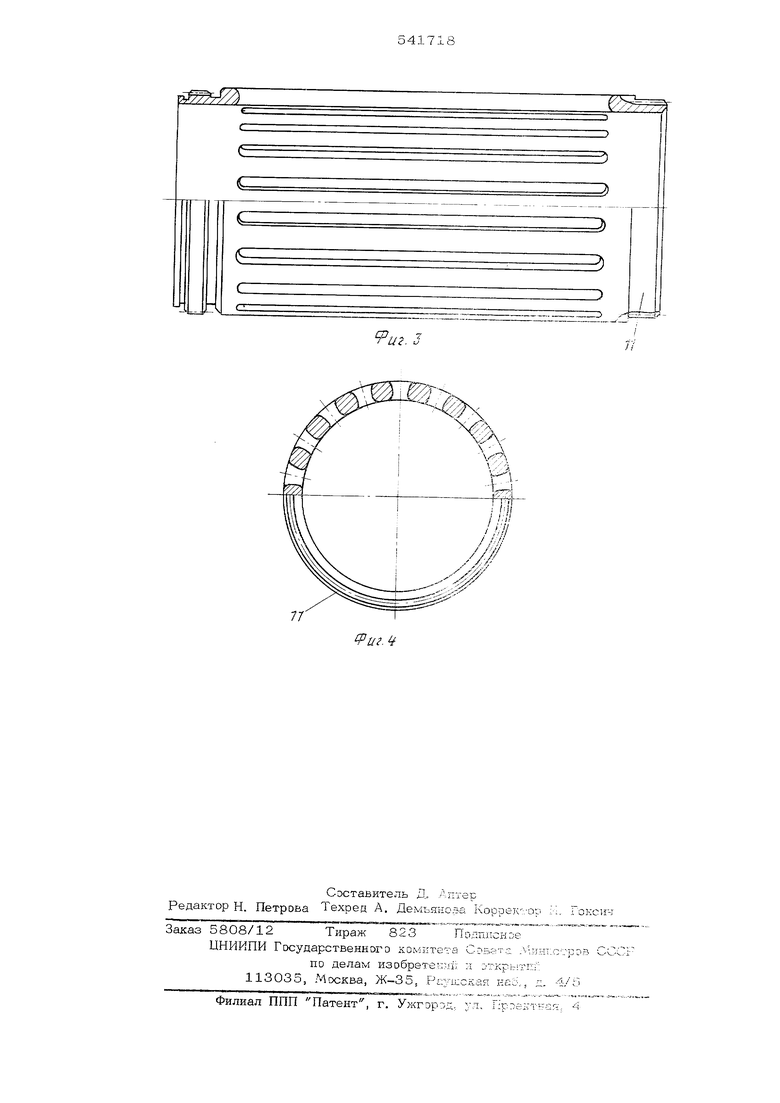
Тем не менее, этот движитель имеет существенный недостаток, заключающийся в том, что при движении его в режиме вра.яения ходовых колес, полезную работу совершают лишь два колеса, н тяговая мощность не реализуется полностью, кроме того, не реализуется опорная поверхность, которук; могло бы создать поднятое колесо, кзхо-дись оно под нагрузкой. Цель изобретения - повышение прэходимости движителя в колесном режиме его работы, Для этого два рычага установлены шарнирно на колесной оси третьего и снабжены к еханизмом поворота их относительно указанной оси. того, механизм поворота рычагов содержит размещеннута в третьем рычаге планетарн -ю передачу, эпицикл которой соединен с нервым рычагotvij а водилосо вторым. Кроме того, с целью улучшения взаимо действия ходовьк колес с грунтом, шарниры первого и второго рычагов связань; ме ду собой упругим эле - ентом. На фиг. 1 схематически изображен движитель, вид спереди; на фиг, 2 - механизм поворота рычагов; на фиг 3 - упругий эле мент, вид спереди; на фиг 4 то же, вид сбоку. Движитель содержит систем трех рыча гов, состоящую из двух крайних рычагов шарнирно соединенных с центральным рычагом 3,, другой конец которого шарнирно установлен в корпусе транспортного средства 4. На концах всех трех рычагов установлены ходовые колеса 3. Движитель м ожет раб отать в двух режим ах : режиме раздельного вра:цения систекГырьг-тагоВ; обес печиваемом эпициклом 6, и врашенкя ходовых колес, осуществляемом водилом 7. Зубчатая передача 8 служит для дистан ционного перевода крайних рычгзгов из положения треугольник в положение раскладки рычагов (на фиг. 1 показано штри пунктирной линией). Фиксация рычагов в положении треугольник производится с помолью упоров 9 и электромагнитного то моза 10. Для улучшения взаимодействия крайних ходовых колес с грунтом при работе движителя в положении раскладка рычагов, шарниры рычагов 1, 2 соединены друге друг ом упруг им элементом 11 (фиг, 3 и 4). Работа движителя в каждом из цвух режимов и изменение положения рычагов производится от электро.г.вигателя 12 и осуществляется при помощи планетар ного ряда 13,, электромагнитных тормозов 14 и 15, планетарного механизма 16, со держащего водило 17 и эпицикл 18, которые связаны друг с другом элементом 11 Для ограничения угла закрутки упругог элемента служат упоры 19, Составными частями привода вращения ходовых колес являются зубчатая передача 2С и цепная передача 21. Работа движителя в режиме раздельного вращения системы рычагов вокруз центральной оси производится следующем образом. Крайние рычаги J. и 2 находятся в положении трезтольник, тормоз 10 включен. Крутящий момент электродвигателя 12 передается через ряд 13, при включенном тормозе 14 удерживающим води/:о 7, па энииикл 8 и через включенный тормоз 10 на рьгчаг 3, тормоз 15 при этом выключен Перевод крайних рычагов 1 и 2 в положение раскладка возможен при контакте колеса, установ.ленного на рычате 3. с грунтом и прокзвопится в след тощем порядке. Включаются тормоза 14 и 15. в результате чего блокируется вращение рычага 3 относительно корпуса транспортного средства и привод вращения хэдовьж колес. Тормоз 10 выключается. ос,обождая при этом эпицикл 6„ Крутящий МО-мент от выходного вала электродвигателя 12. через ряд 13 и (3 передается на передачу В и механизм 16з водило 17 которого связано через элемент 11 с рьтчагом 2, а эпицик-ч 18 - с рычагом 1„ Под воздействием крутящего момента начинает разворачиваться один из крайних рьтчгагов. колесо которого не находите; з контекте с грунтом. В конце разворота рь.гчага, после контакта третьего колеса с грунтам, производится дополнител:ьиь Й взаимный развоюот водила 17 и эпицикла 18, сопровождающийся закруткой э,:1емента 11. Угол закрутки упругого вала ограничен упорами 19 и задается, исходя из условжчя распределения нагрузок по колесам движителя и требований, пресгявляемых к проходимости и плавности хода транспортного средства. В резу.льтате закрутки упругого вала, вошедшее в контакт с грунтом третье колесо воспринимает часть нагрузки, прихо.цяжейся на движитель от веса транспортного средства. После этого включается тормоз 10, который блокирует передачу 8. одновременно производится выключение электродвигателя 12. Таким образом, движитель находится в положении раскладка крайних рьчагов и подготовлен к движению в режиме врашения ходовык колес. Для обеспечения режима вращения ходовьх ДьОлес необходимо выключить тормоз 14, тормоза 10 и 15 остаются включенными. После этого включением электродвигателя 12 осуществляется передача крут,ящего момента на водило 7, передач 20 и далее, через передачу 21, всем трем ходовым .ко.лесам /цвижителя, ,Данное изобретение значительна расширяет возможности движителя при его работ в режиме вращения колес. Как уже отмеча лось, введение механизма раскладка край ных рычагов увеличивает опорную поверхност движителя и всего транспортного средства в полтора раза, а это позволяет использовать режим вращения колес в более широком диапазоне грунтов. Особенно перспективным является его использование для транспортных средств - планетоходов, так как этот движитель легко конвертируется и занимает сравнительно малый объем а после доставки может работать в любом из своих режимов, в зависимости от условий рельефа и грунта. Формула изобретения 1. Колесно-шагающий движитель, содержащий систему соединенных между собой трех рычагов с установленными на их концах ходовыми колесами, оси которых размеш.ены в вершинах углов равностороннего треугольника, и приводы раздельного вращения системы рычагов и ходовых колес, отличающийся тем, что, с целью повьш1ения проходимости в колесном режиме, два рычага установлены шарнирно на колесной оси третьего и снабжены механизмом поворота их относительно указанной оси. 2.Движитель по п. 1, отличающ и и с я тем, что механизм поворота рьгчагов содержит размещенную в третьем рычаге планетарную передачу, эпицикл которой соединен с первым рычагом, а водило - со вторым. 3.Движитель по п. 1, отличающийся тем, что, с целью улучшения взаимодействия ходовых колес с грунтом, шарниры первого и второго рычагов связаны между собой упругим элементом. Источники информации, принятые во внимание при экспертизе: 1,Патент Японии 45-23765, 80.А5, 1 970 г. 2.Патент США Ко 3348518, 115-1, 1967 г.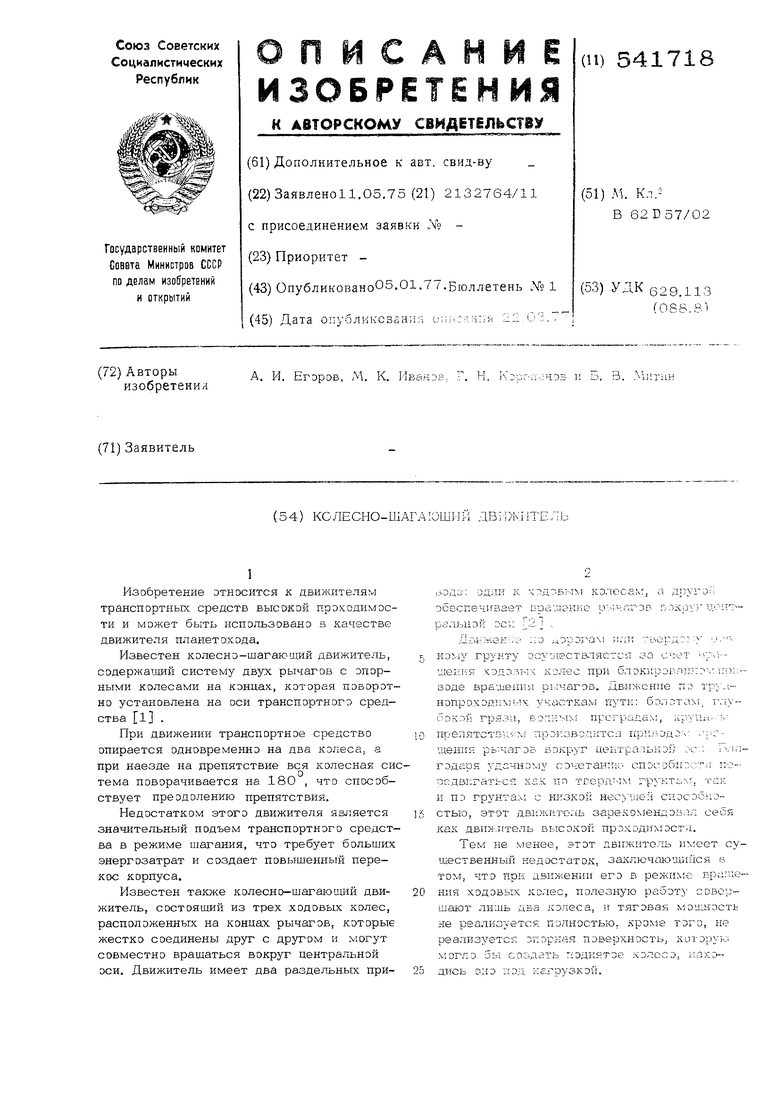

| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель | 1977 |
|
SU686931A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ОПОРНОЙ И ГЕОМЕТРИЧЕСКОЙ ПРОХОДИМОСТИ | 2019 |
|
RU2705869C1 |
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| Колесно-шагающий движитель | 1977 |
|
SU679465A1 |
5
цг.1
Фиг. 2
