Область техники настоящего изобретения
Настоящее изобретение относится к единице оборудования и способу логистики изделий в виде плит.
Предшествующий уровень техники настоящего изобретения
Изделие в виде плиты представляет собой продукт, полученный в результате производственного процесса, и, в частности, представляет собой крупногабаритную плиту.
В конце процесса производства изделия в виде плит обычно перемещают таким образом, чтобы направить их на дальнейшие стадии обработки, такие как, например, измельчение, или на складские площадки, где они ожидают упаковки для продажи.
На стадии хранения изделия в виде плит помещают в соответствующие рамы, которые могут быть горизонтальными или вертикальными в зависимости от положения, принимаемого самими изделиями, а затем перемещаются по отдельности или в виде блока вместе с соответствующей рамой.
Перемещение изделий в виде плит обычно проводится посредством соответствующего оборудования, например, типа с вакуумными присосками, которое может управляться вручную или автоматически.
С учетом часто очень больших размеров изделий в виде плит легко понять, что их перемещение является особенно деликатным, поэтому, чем дальше находятся складские площадки, тем большим является риск разрушения при перемещении на них.
Для преодоления этого недостатка изделия в виде плит часто перемещают вместе с соответствующей рамой.
Однако этот тип перемещения также имеет высокий риск разрушения.
Фактически, в случае горизонтальных рам масса изделий в виде плит, расположенных сверху друг на друге, отягощает нижнее изделие в виде плиты, которое может разрушиться или деформироваться в результате этой механической нагрузки. Присутствие каких-либо чешуек материала определяет нелинейное и неравномерное распределение всей нагрузки, что может вызывать разбалансировку соответствующей стопки и падение изделий в виде плит, которые ее составляют, особенно при операциях перемещения.
В случае вертикальных рам, с другой стороны, изделия в виде плит часто являются нестабильными, так что перемещение самой рамы может вызывать опрокидывание или падение изделий в виде плит.
Таким образом, из этого следует, что перемещение изделий в виде плит на данный момент является особенно деликатным и, в дополнение к вовлечению высокого риска разрушения самих изделий, оно требует значительного количества времени, что, следовательно, снижает выход технологической линии.
Способы хранения изделий в виде плит, используемые на данный момент, в которых складские площадки часто находятся далеко от технологической линии, и рамы, описанные выше, также требуют больших рабочих зон.
Описание настоящего изобретения
Основной целью настоящего изобретения является разработка единицы оборудования для логистики изделий в виде плит, которая обеспечивала бы перемещение изделий в виде плит легко и безопасно, для ограничения риска разрушения или повреждения самих изделий.
В рамках этой цели одним объектом настоящего изобретения является ускорение перемещения изделий в виде плит для повышения производительности соответствующей установки.
Другим объектом настоящего изобретения является разработка единицы оборудования для логистики изделий в виде плит, которая обеспечивает уменьшение рабочих зон и зон, требуемых для выполнения операций перемещения и хранения.
Другим объектом настоящего изобретения является разработка единицы оборудования для логистики изделий в виде плит, которая обеспечивает преодоление вышеуказанных недостатков уровня техники в рамках простого, рационального, легкого, эффективного для применения и недорогого решения.
Вышеуказанные цели обеспечиваются настоящим оборудованием для логистики изделий в виде плит, имеющим характеристики по п. 1.
Вышеуказанные цели также обеспечиваются способом логистики изделий в виде плит согласно п. 33.
Краткое описание фигур
Другие характеристики и преимущества настоящего изобретения будут более очевидными из описания некоторых предпочтительных, но не исключительных вариантов осуществления единицы оборудования для логистики изделий в виде плит, показанных в качестве иллюстративного, но не ограничивающего примера на приложенных фигурах, на которых:
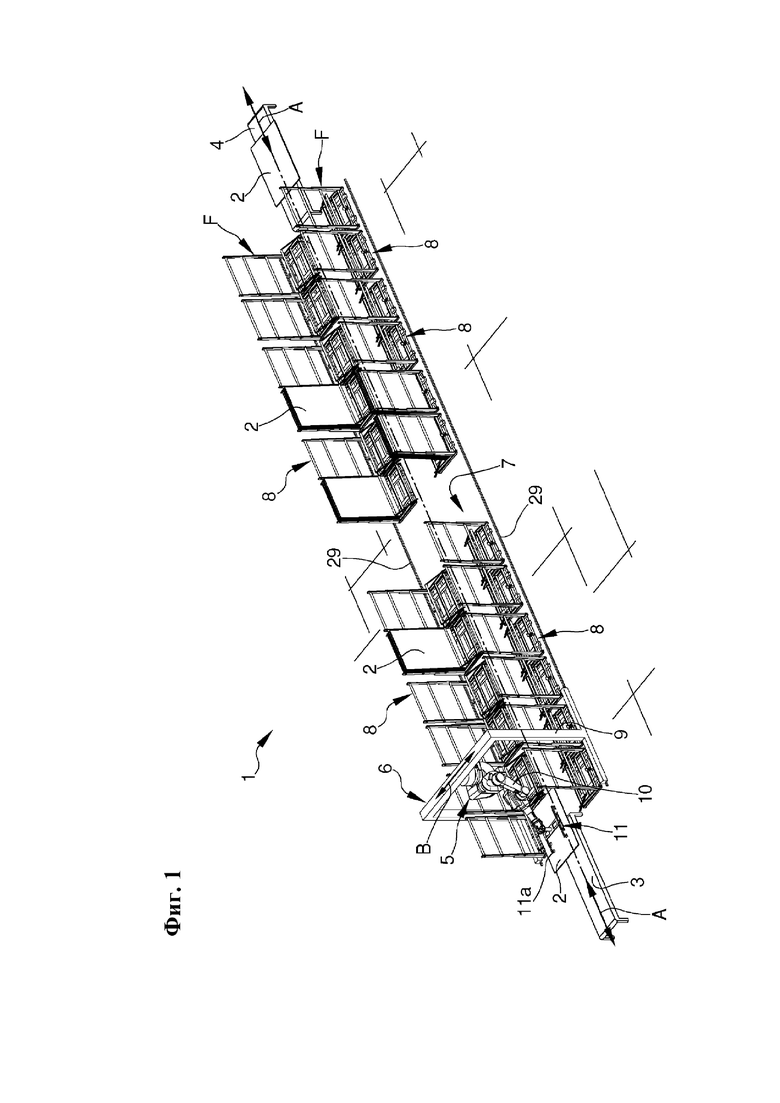
фиг. 1 представляет аксонометрическую проекцию единицы оборудования согласно настоящему изобретению в первом варианте осуществления;
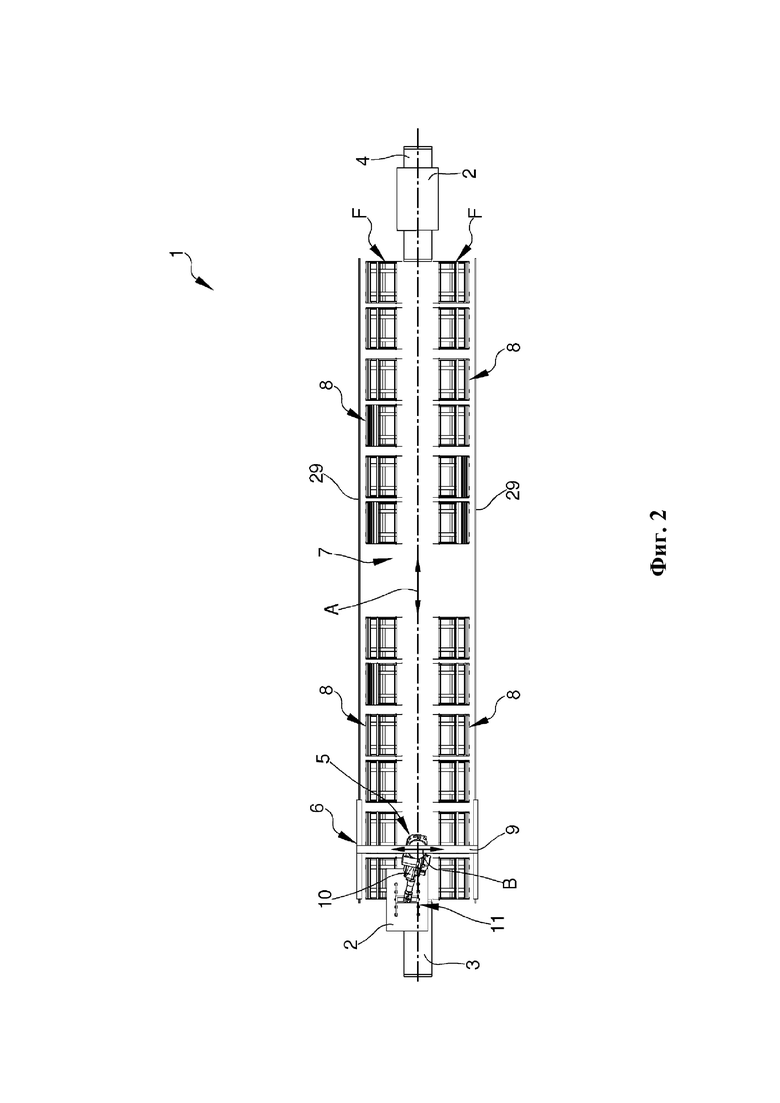
фиг. 2 представляет вид сверху оборудования на фиг. 1;
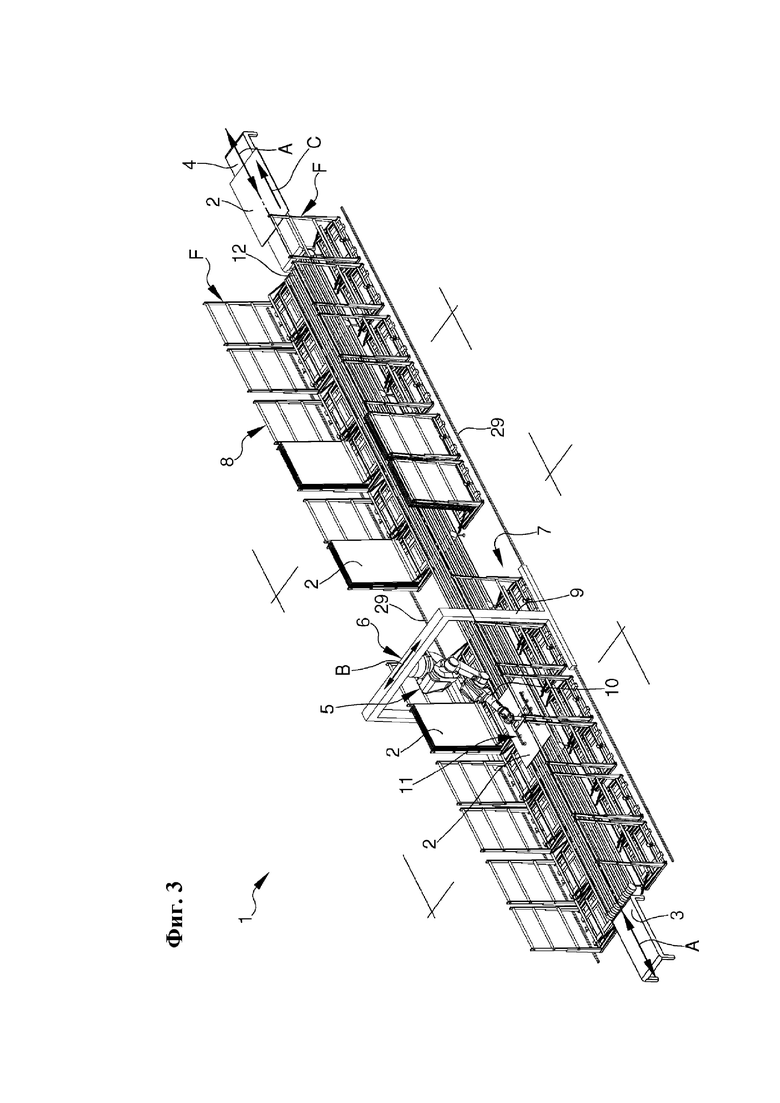
фиг. 3 представляет аксонометрическую проекцию единицы оборудования согласно настоящему изобретению во втором варианте осуществления;
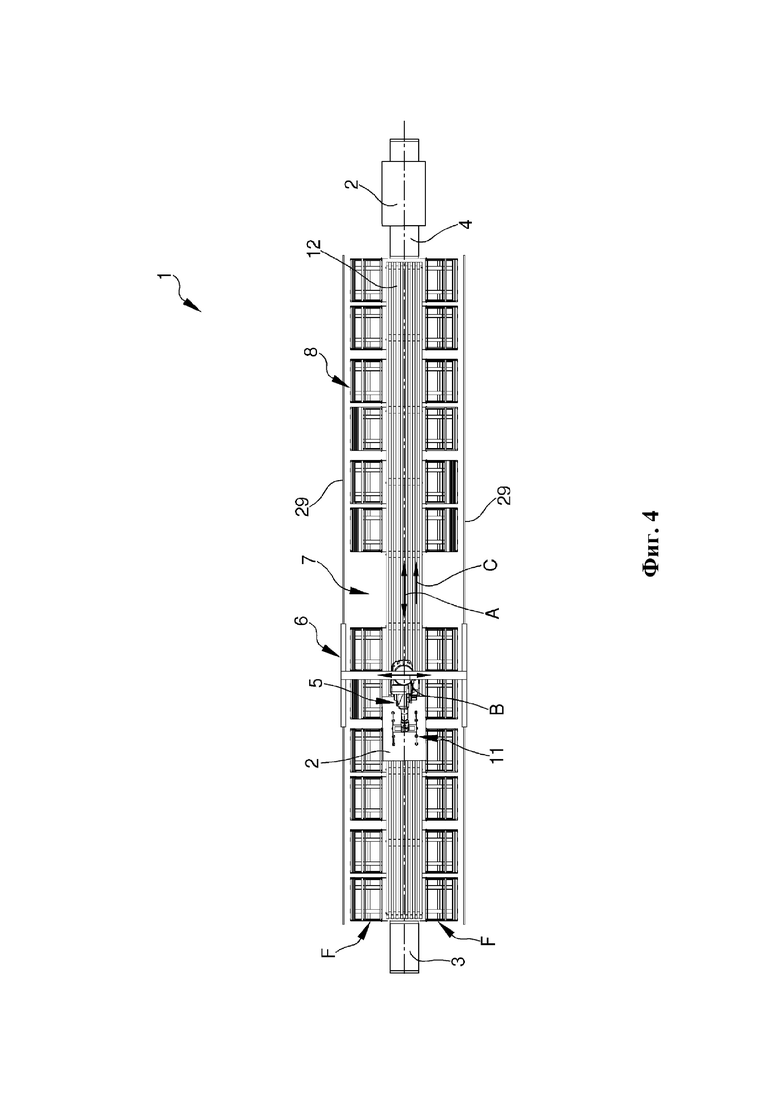
фиг. 4 представляет вид сверху оборудования на фиг. 3;
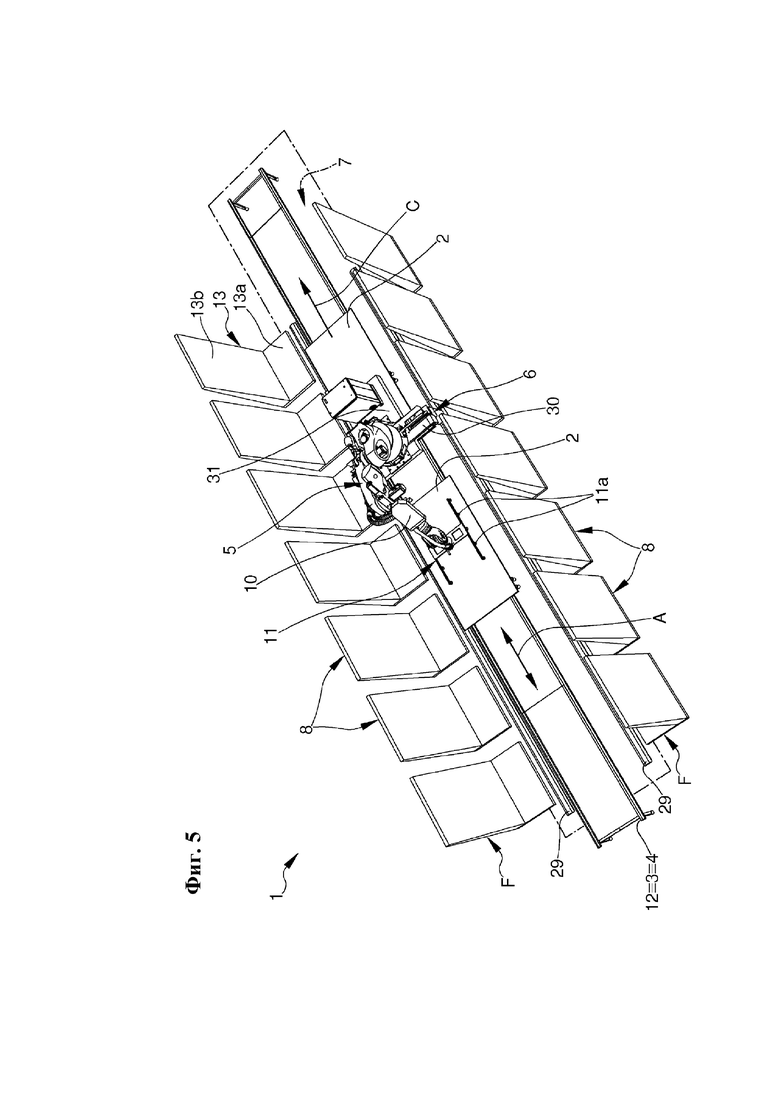
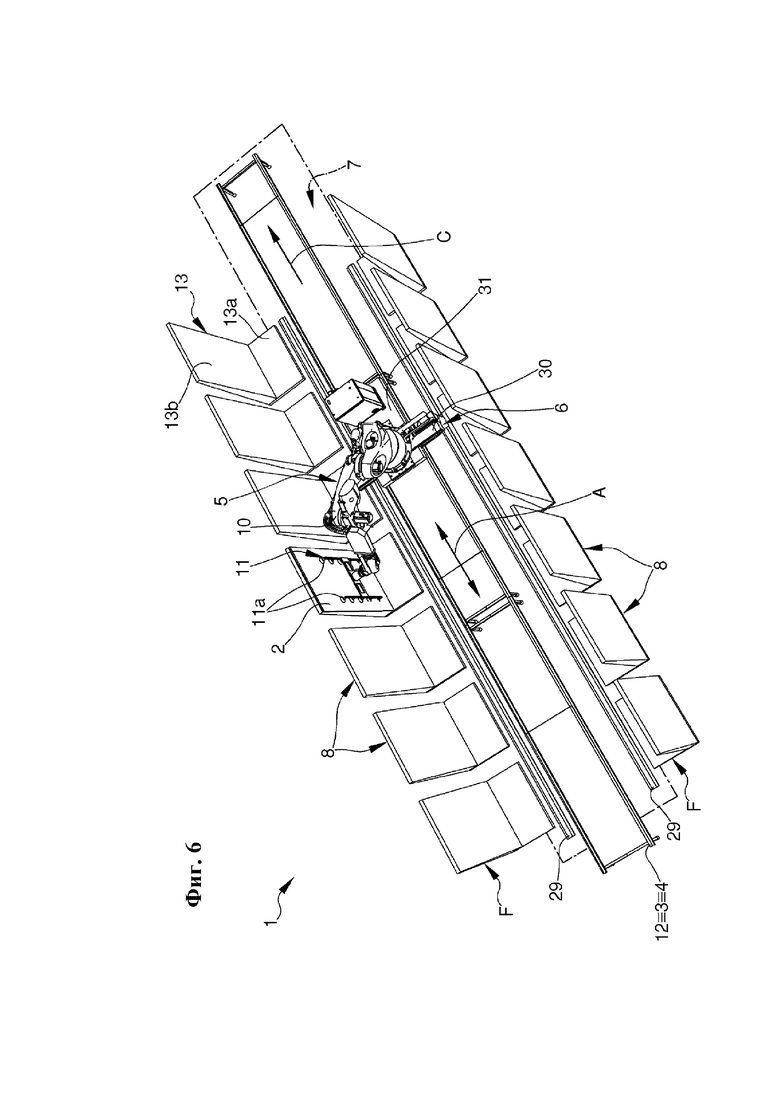
фиг. 5-6 представляют виды в перспективе третьего варианта осуществления оборудования для логистики изделий в виде плит согласно настоящему изобретению на двух различных стадиях работы;
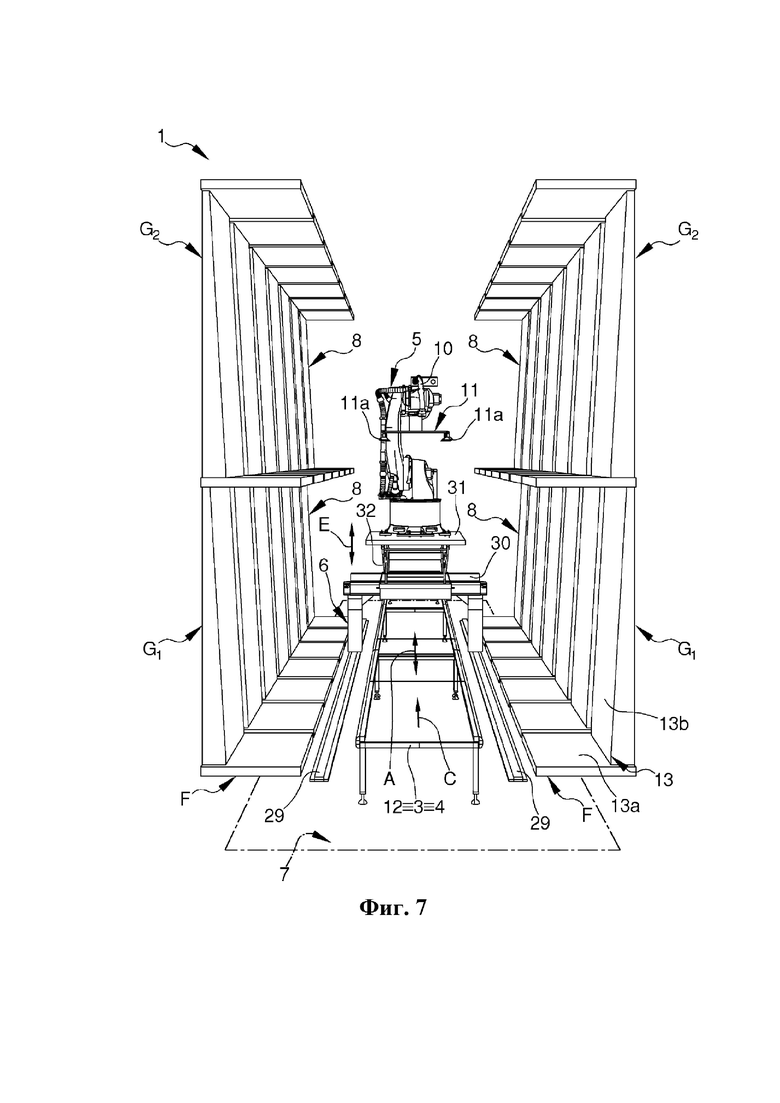
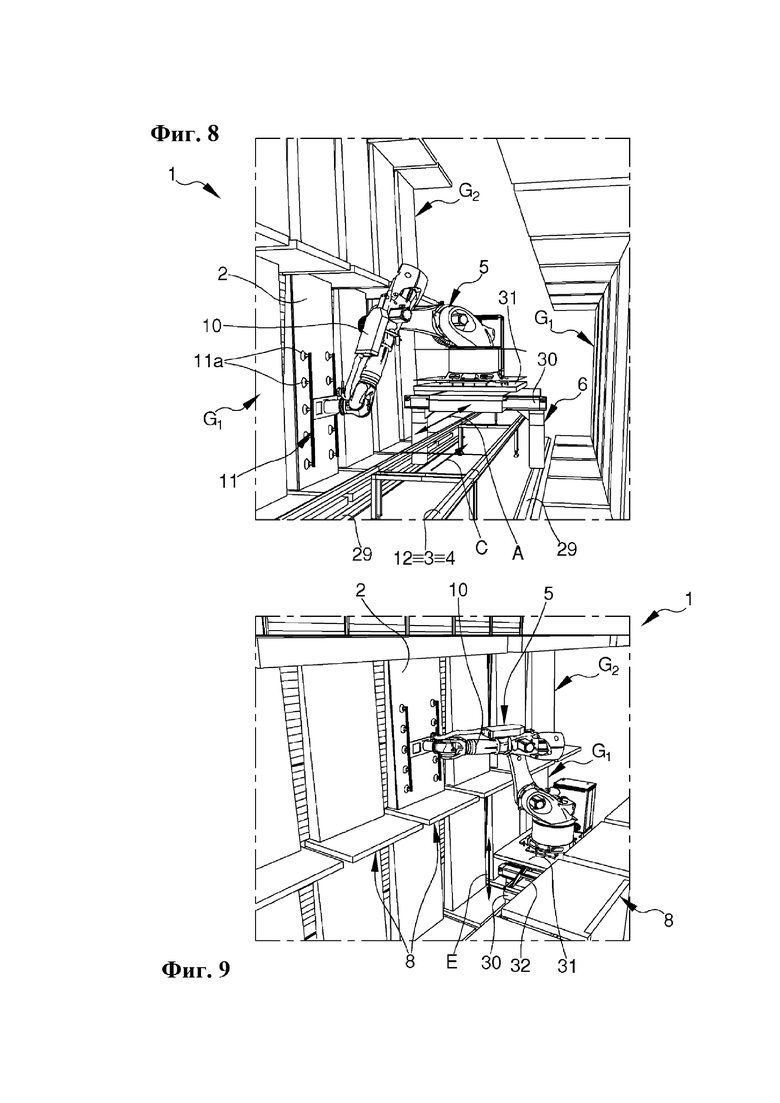
фиг. 7-9 представляют виды в перспективе четвертого варианта осуществления оборудования для логистики изделий в виде плит согласно настоящему изобретению на двух различных стадиях работы;
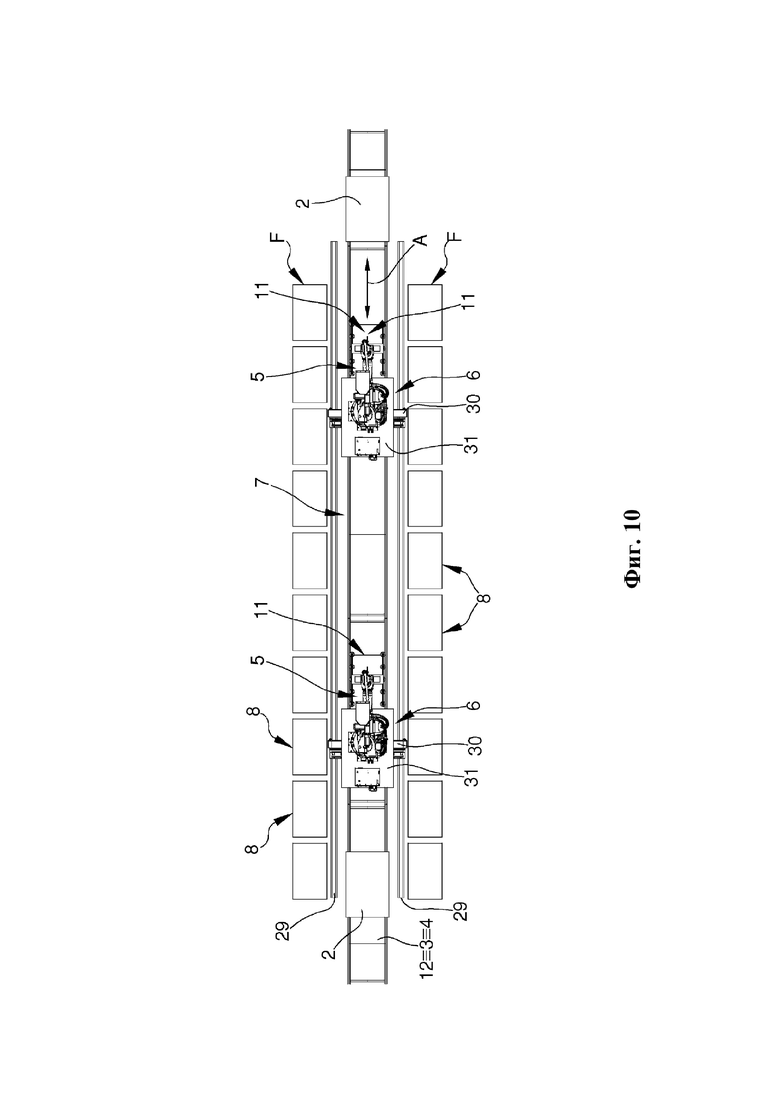
фиг. 10 представляет вид сверху пятого варианта осуществления оборудования согласно варианту осуществления;
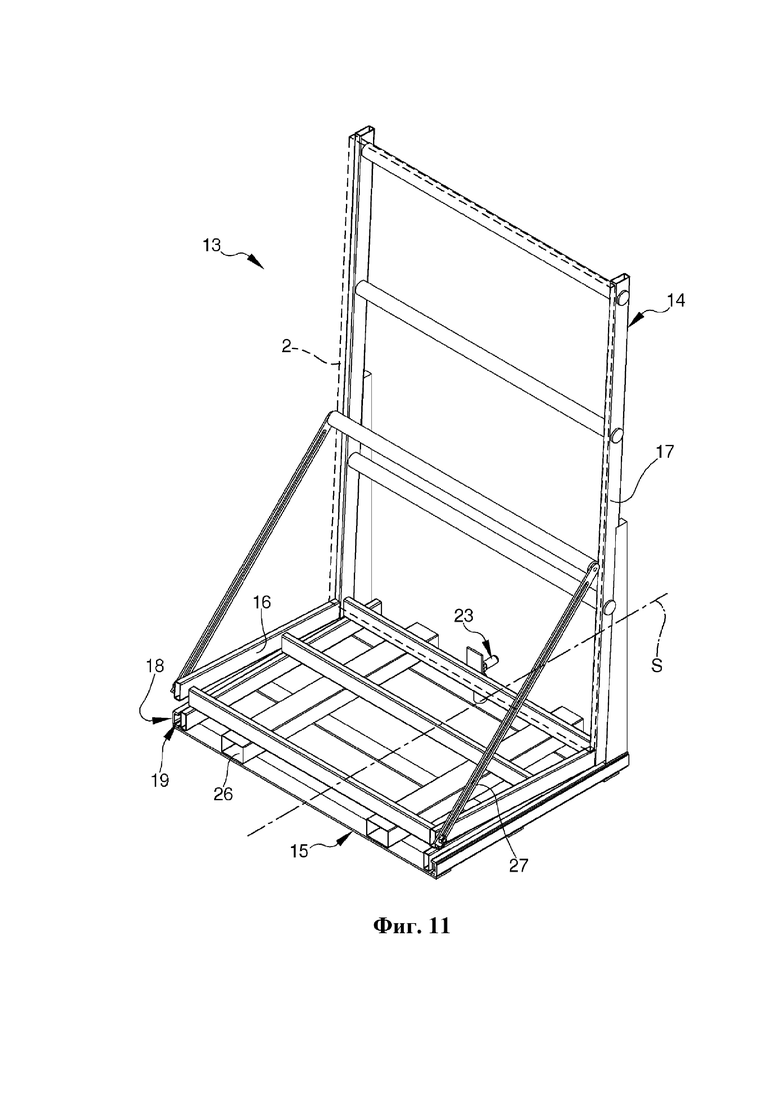
фиг. 11 представляет аксонометрическую проекцию компонента оборудования согласно настоящему изобретению;
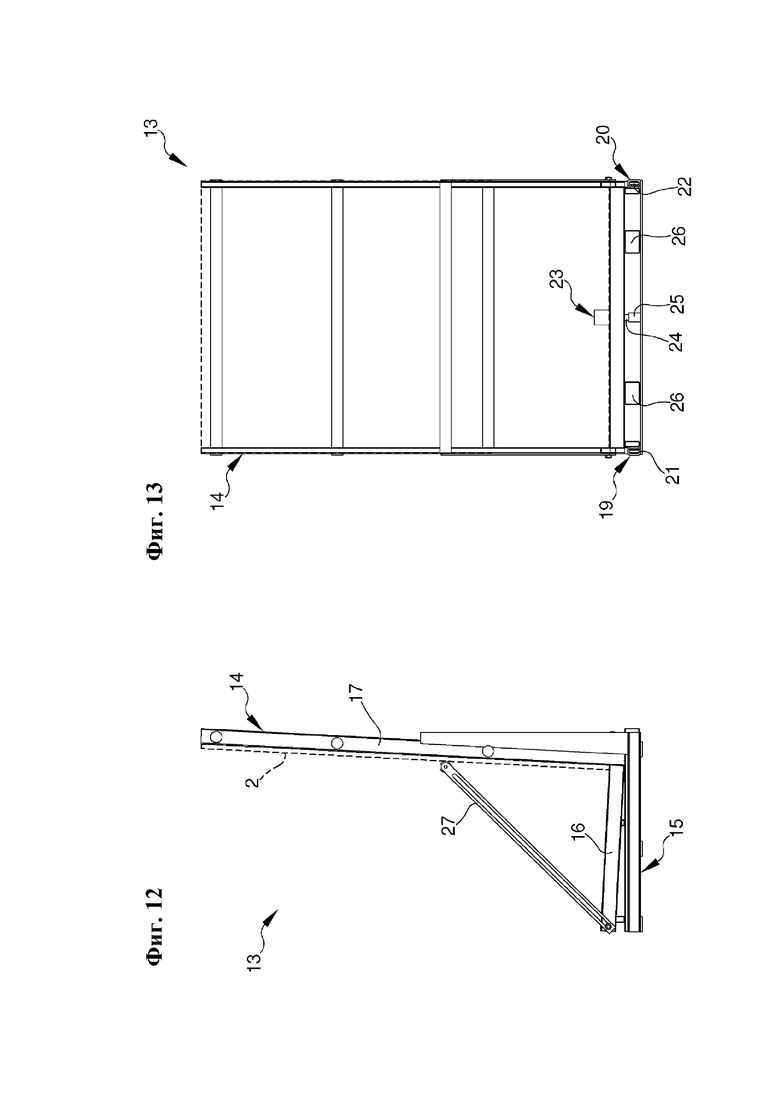
фиг. 12 представляет вертикальный вид сбоку компонента на фиг. 11;
фиг. 13 представляет вертикальный вид сзади компонента на фиг. 11.
Варианты осуществления настоящего изобретения
С конкретной ссылкой на эти фигуры номер позиции 1 показывает, в общем, единицу оборудования для логистики изделий в виде плит, причем термин «логистика» используется для ссылки на все операции перемещения и хранения самих изготовленных изделий.
В других вариантах осуществления, показанных на фигурах, компоненты, выполняющие одинаковые функции, определены одинаковыми номерами позиций.
Оборудование 1 используется для перемещения по меньшей мере одного изделия 2 в виде плиты.
Изделие 2 в виде плиты представляет собой сплошное тело, имеющее два размера, преобладающие над третьим, толщиной, и содержащее две по существу плоские поверхности, противоположные друг другу.
Например, в области керамической промышленности изделия 2 в виде плит могут иметь такие размеры, что одна или более сторон могут иметь длину до трех метров.
Оборудование 1 содержит по меньшей мере одну линию 3 подачи и по меньшей мере одну линию 4 выдачи изделий 2 в виде плит.
В частности, изделия 2 в виде плит, поступающие с линии 3 подачи, должны перемещаться или храниться в зависимости от типа, и затем их выбирают для передачи на линию 4 выдачи, чтобы упаковывать для продажи или дальнейшей обработки, при необходимости.
В конкретных вариантах осуществления, показанных на фигурах, линия 3 подачи и линия 4 выдачи являются типом опорных поверхностей, на которых изделия 2 в виде плит располагаются или с которых поднимаются посредством соответствующих подъемных устройств (не показаны на фигурах), таких как, например, вилочные подъемники, или транспортировочные поддоны, или механические роботы.
Однако нельзя исключать альтернативные варианты осуществления, где линия 3 подачи и линия 4 выдачи имеют другие формы и являются, например, типом роликовых конвейеров или конвейерных лент.
Оборудование 1 содержит:
- по меньшей мере один роботизированный захватный узел 5 изделия 2 в виде плиты, снабженный по меньшей мере тремя степенями свободы и расположенный между линией 3 подачи и линией 4 выдачи;
- первые средства 6 перемещения захватного узла 5 вдоль по меньшей мере одного направления перемещения A.
Направление перемещения A по существу является горизонтальным.
Согласно настоящему изобретению линия 3 подачи и линия 4 выдачи расположены вдоль направления перемещения A. В частности, линия 3 подачи и линия 4 выдачи по существу выровнены друг относительно друга вдоль направления перемещения A.
Захватный узел 5, перемещающийся согласно своим собственным степеням свободы и согласно направлению перемещения A, определяет рабочую зону 7, которая располагается между линией 3 подачи и линией 4 выдачи.
Согласно настоящему изобретению оборудование 1 содержит множество временных станций 8 хранения изделия 2 в виде плиты, расположенных сбоку от захватного узла 5 и по существу (т.е. за исключением каких-либо допусков в их расположении) выровненных друг относительно друга для определения по меньшей мере одного ряда F, по существу параллельного направлению перемещения A.
Захватный узел 5 приспособлен для:
- поднятия изделия 2 в виде плиты, поступающего с линии 3 подачи;
- расположения изделия 2 в виде плиты по меньшей мере на одной из станций 8 хранения и
- поднятия изделия 2 в виде плиты по меньшей мере с одной из станций 8 хранения и доставки его до линии выдачи 4.
В частности, благодаря первым средствам 6 перемещения захватный узел 5 может доводиться ближе к линии 3 подачи, а также обеспечивается тремя степенями свободы, он может перемещаться вдоль по существу вертикального направления и вращаться для обеспечения поднятия поступающего изделия 2 в виде плиты.
Затем захватный узел 5 может доводиться ближе к станции 8 хранения для хранения только что поднятого изделия 2 в виде плиты или для поднятия ранее хранящегося изделия 2 в виде плиты и перемещения его на линию 4 выдачи.
В частности, ряд F расположен на кромке периметра рабочей зоны 7.
Таким образом, захватный узел 5 может легко доставать до станций 8 хранения, которые расположены в пространстве так, что они не препятствуют перемещениям захватного узла 5 вдоль направления перемещения A.
Удобно, что оборудование 1 содержит по меньшей мере два ряда F, расположенных на противоположных сторонах относительно захватного узла 5.
Как можно увидеть на фиг. 1-10, ряды F расположены по существу параллельно и обращенными друг к другу.
Более конкретно, рабочая зона 7 расположена между рядами F.
В вариантах осуществления, показанных на фигурах, есть два ряда F, и захватный узел 5 может легко доставать до станций 8 хранения, расположенных на противоположных сторонах рабочей зоны 7.
А именно, захватный узел 5, как только располагается вблизи станции 8 хранения, расположенной на ряду F, может легко доставать до противоположной станции 8 хранения без дополнительного перемещения вдоль направления перемещения A.
При этом можно улучшать производительность оборудования 1, таким образом экономя время и энергию.
Предпочтительно захватный узел 5 является типом антропоморфного робота 10.
Более конкретно, первые средства перемещения 6 содержат по меньшей мере одну пару направляющих рельсов 29, проходящих параллельно направлению перемещения A, и по меньшей мере одну несущую раму 30, связанную подвижно скользящим образом с парой рельсов 29 и поддерживающую захватный узел 5.
В вариантах осуществления, показанных на фиг. 1-4, несущая рама 30 является типом машины 9 с мостовым краном, и захватный узел 5 связан в подвешенном состоянии с указанной машиной 9 с мостовым краном. Другими словами, машина 9 с мостовым краном имеет перекладину, которая расположена по существу горизонтально и с которой антропоморфный робот 10 связан в подвешенном состоянии.
В этом варианте осуществления рельсы 29 расположены вне рабочей зоны 7. В частности, рельсы 29 расположены на противоположной стороне относительно рабочей зоны 7 относительно по меньшей мере одного ряда F, предпочтительно относительно обоих рядов F.
В вариантах осуществления, показанных на фиг. 5-10, с другой стороны, оборудование 1 содержит опорную поверхность 31 захватного узла 5, которая сцепляется с несущей рамой 30 вдоль направления перемещения A. Другими словами, антропоморфный робот 10 расположен на опорной поверхности 31 и перемещается сцепленным с ней вдоль направления перемещения A.
Удобно, что в этом варианте осуществления по меньшей мере один из рельсов 29 расположен внутри рабочей зоны 7. Более конкретно, в вариантах осуществления, показанных на фиг. 5-10, рельсы 29 расположены внутри рабочей зоны 7 и расположены между рядами F.
Таким образом, захватный узел 5 может легко доставать до станций 8 хранения, которые расположены в пространстве так, что они не препятствуют перемещениям захватного узла 5 вдоль направления перемещения A.
Однако нельзя исключать, что также в вариантах осуществления, показанных на фиг. 1-4, рельсы 29 могут располагаться между рядами F внутри рабочей зоны 7.
В варианте осуществления, показанном на фиг. 7-9, по меньшей мере один из рядов F содержит по меньшей мере две группы G1, G2 станций 8 хранения, расположенных друг над другом.
Другими словами, станции 8 хранения могут располагаться на нескольких уровнях, так что пространство и производительность можно оптимизировать.
Более конкретно, как показано на фиг. 7-9, ряд F состоит из базовой группы G1 станций 8 хранения, закрепленных на земле, и верхней группы G2, причем каждая станция 8 хранения связана сверху со станцией 8 хранения, относящейся к базовой группе G1.
Однако нельзя исключать другие варианты осуществления, где ряд F содержит множество верхних групп G2.
Все еще ссылаясь на фиг. 7-9, группы G1,G2 содержат одинаковое количество станций 8 хранения.
Однако нельзя исключать, что группы G1, G2 содержат различное количество станций 8 хранения.
Удобно, что оборудование 1 содержит подъемные средства 32, расположенные между несущей рамой 30 и захватным узлом 5 и приспособленные для перемещения захватного узла 5 вдоль по меньшей мере одного по существу вертикального направления подъема E для доставки его к каждой из групп G.
Более конкретно, подъемные средства 32 располагаются между опорной поверхностью 31 и несущей рамой 30.
Подъемные средства 32 функционируют для подъема захватного узла 5, чтобы доставать до станций 8 хранения, расположенных на различных уровнях.
В варианте осуществления, показанном на фиг. 7-9, подъемные средства 32 содержат по меньшей мере одну платформу рычажного подъемника.
Однако нельзя исключать, что подъемные средства 32 могут быть другого типа.
Предпочтительно оборудование 1 содержит вторые средства перемещения (подробно не показанные на фигурах) захватного узла 5 вдоль по меньшей мере одного направления регулирования B, перпендикулярного направлению перемещения A.
Направление регулирования B по существу является горизонтальным и перпендикулярным направлению перемещения A.
Вторые средства перемещения работают вместе с первыми средствами 6 перемещения, чтобы облегчить достижение захватным узлом 5 станций 8 хранения, расположенных на кромке периметра рабочей зоны 7, и/или удаление от них.
Предпочтительно захватный узел 5 содержит средства 11 для захвата изделия 2 в виде плиты.
В конкретных вариантах осуществления, показанных на фигурах, средства 11 для захвата являются типом вакуумных присосок.
Более конкретно средства 11 для захвата содержат множество вакуумных присосок 11a и по меньшей мере один контур вакуума, функционально связанный с вакуумными присосками 11a.
Однако нельзя исключать альтернативные варианты осуществления, где средства 11 для захвата имеют другую структуру и, например, могут являться типом зацепляющих элементов или зажима.
Предпочтительно средства 11 для захвата содержат средства безопасности, приспособленные для предотвращения падения изделия 2 в виде плиты.
Предпочтительно средства безопасности содержат средства детектирования для детектирования отсутствия вакуума по меньшей мере в одной из вакуумных присосок 11a.
В частности, если одна из вакуумных присосок 11a не прилипает полностью к изделию 2 в виде плиты, изделие 2 в виде плиты может частично или полностью открепиться от захватного узла 5 и повредиться.
Благодаря наличию средств детектирования для детектирования отсутствия вакуума оборудование 1 может блокироваться, таким образом избегая перемещения изделия 2 в виде плиты, захваченного небезопасным образом.
Альтернативно или в дополнение, средства безопасности могут быть механического типа и содержать, например, зажимной элемент (не показан на фигурах), приспособленный для контакта с изделием 2 в виде плиты, чтобы удерживать его после его захвата.
Таким образом, в случае частичной или полной потери сцепления между средствами 11 для захвата и изделием 2 в виде плиты, зажимной элемент удерживает изделие 2 в виде плиты и предотвращает его разбалансировку или падение при перемещении.
В вариантах осуществления, показанных на фиг. 3-10, оборудование 1 содержит по меньшей мере одну транспортную линию 12 изделия 2 в виде плиты, расположенную внутри рабочей зоны 7 и находящуюся между линией 3 подачи и линией 4 выдачи.
Удобно, что транспортная линия 12 перемещается вдоль по меньшей мере одного направления транспортирования C, ориентированного от линии 3 подачи к линии 4 выдачи, как показано на фигурах, для перемещения вперед изделия 2 в виде плиты в саму линию выдачи.
Более конкретно транспортная линия 12 проходит вдоль направления перемещения A. Другими словами, направление транспортирования C является по существу параллельным направлению перемещения A. Направление транспортирования C может также быть выровнено вертикально с направлением перемещения A, под ним.
В конкретном варианте осуществления, показанном на фигурах 3 и 4, транспортная линия 12, например, является типом конвейерной ленты или подобным.
Удобно, что транспортная линия 12 располагается между рядами F.
Изделие 2 в виде плиты, после размещения сверху на линии 3 подачи, затем перемещается параллельно направлению перемещения A.
Захватный узел 5 приспособлен для поднятия изделия 2 в виде плиты с транспортной линии 12 для помещения его на одну из станций 8 хранения и для поднятия изделия 2 в виде плиты с одной из станций 8 хранения для помещения его на транспортную линию 12.
Изделие 2 в виде плиты, поступающее с линии 3 подачи, переносится автономно, посредством соответствующих средств переноса, на транспортную линию 12, с которой его поднимают посредством захватного узла 5 для помещения на станцию 8 хранения.
Захватный узел 5, следовательно, приспособлен для поднятия изделия 2 в виде плиты со станции 8 хранения и помещения его на транспортную линию 12, чтобы направлять его на линию 4 выдачи.
Более конкретно, когда изделие 2 в виде плиты, перемещающееся вдоль направления транспортирования C на транспортной линии 12, достигает зоны погрузки, расположенной на (т.е. по существу выровненной) станции 8 хранения, на которой его следует размещать, далее называемой предварительно назначенной для загрузки станцией 8 хранения, захватный узел 5 делает первый подъем изделия 2 в виде плиты и помещает его на предварительно назначенную для загрузки станцию 8 хранения; захватный узел 5 затем в зависимости от требований, т.е. в зависимости от типа изделия 2 в виде плиты, которое необходимо поднять, выполняет второе поднятие изделия 2 в виде плиты с одной из станций 8 хранения, далее называемой предварительно назначенной для разгрузки станцией 8 хранения, и помещает его в зону разгрузки транспортной линии 12, расположенной на предварительно назначенной для разгрузки станции 8 хранения.
Таким образом, перемещения захватного узла 5 первыми средствами 6 перемещения на линию 3 подачи и на линию 4 выдачи снижаются благодаря наличию транспортной линии 12.
Транспортная линия 12 фактически перемещает изделие 2 в виде плиты, пока оно не достигнет соответствующей станции 8 хранения, где оно поднимается захватным узлом 5.
Аналогично, изделие 2 в виде плиты, которое необходимо направлять на линию 4 выдачи, поднимается с соответствующей станции 8 хранения посредством захватного узла 5, который высвобождает его на ближайшей секции транспортной линии 12.
В варианте осуществления, показанном на фиг. 3 и 4, транспортная линия 12 отделена от линии 3 подачи и от линии 4 выдачи.
В варианте осуществления, показанном на фиг. 5-10, с другой стороны, транспортная линия 12 совпадает с линией 3 подачи и с линией 4 выдачи. В этом варианте осуществления транспортная линия 12, линия 3 подачи и линия 4 выдачи сделаны в виде одной транспортной линии, перемещающейся вдоль направления перемещения A.
Предпочтительно транспортная линия 12 расположена на более низкой высоте, чем несущая рама 30, так что она проходит под ней. Несущая рама 30 и транспортная линия 12, таким образом, перемещаются друг относительно друга вдоль направления перемещения A и вдоль направления транспортирования C, соответственно.
Более конкретно в вариантах осуществления, показанных на фиг. 5-10, транспортная линия 12 расположена на более низкой высоте, чем опорная поверхность 31.
Таким образом, захватный узел 5 свободно перемещается в направлении перемещения A даже при переносе изделий 2 в виде плит на линию 3 подачи.
Этот вариант осуществления также обеспечивает перенос изделий 2 в виде плит на следующие станции обработки без необходимости в перемещении захватным узлом 5, что дает в результате оптимизацию затрат времени.
В варианте осуществления, показанном на фиг. 10, оборудование 1 содержит множество захватных узлов 5, расположенных последовательно друг относительно друга вдоль направления перемещения A и перемещающихся независимо друг от друга вдоль самого направления перемещения. В этом варианте осуществления каждый захватный узел 5 сконфигурирован как для подъема изделий 2 в виде плит, поступающих с линии 3 подачи, и расположения их на соответствующую станцию 8 хранения, так и для подъема изделий 2 в виде плит со станции 8 хранения и переноса их на линию 4 выдачи. Удобно, что оборудование 1 также содержит электронный блок управления, подробно не показанный на фигурах, функционально связанный с каждым захватным узлом 5 и приспособленный для контроля перемещений и действий поднятия и разгрузки изделий 2 в виде плит каждым захватным узлом 5 в зависимости от типов изделий 2 в виде плит, поступающих с линии 3 подачи, и от типа изделий 2 в виде плит, требуемых линией 4 выдачи, для оптимизации производительности.
Предпочтительно каждая станция 8 хранения содержит по меньшей мере одну раму 13 для логистики изделия 2 в виде плиты.
Для подробного описания рамы 13 смотрите заявку, совместно поданную тем же заявителем и содержащуюся в настоящем документе посредством ссылки.
Рама 13 снабжена:
- по меньшей мере одной удерживающей рамой 14 для одного или более изделий 2 в виде плит;
- по меньшей мере одной фиксированной рамой 15, прикрепленной к земле.
Удерживающая рама 14 снабжена:
- по меньшей мере одним базовым элементом 16, приспособленным для приема для поддержания толщины изделия 2 в виде плиты; и
- по меньшей мере один стопорный элемент 17, проходящий перпендикулярно базовому элементу 16 и приспособленный для приема для поддержания по меньшей мере одной поверхности изделия 2 в виде плиты.
Предпочтительно базовый элемент 16 определяет по существу плоскую базовую поверхность и располагается несколько под наклоном относительно горизонтальной плоскости, а стопорный элемент 17 определяет по существу плоскую стопорную поверхность и располагается несколько под наклоном относительно вертикальной плоскости.
Соответственно, базовый элемент 16 и стопорный элемент 17 расположены таким образом, что базовая поверхность и стопорная поверхность определяют по существу прямой угол между ними.
Эта компоновка базового элемента 16 и стопорного элемента 17 означает, что изделие 2 в виде плиты при расположении на удерживающей раме 14 располагается несколько под наклоном относительно вертикальной оси, чтобы ограничивать риск опрокидывания и соскальзывания вниз.
Удобно, что рама 13 содержит съемные средства 18 зацепления удерживающей рамы 14 с фиксированной рамой 15.
Средства 18 зацепления приспособлены для обеспечения скольжения удерживающей рамы 14 относительно фиксированной рамы 15 вдоль по существу горизонтального направления скольжения S и для предотвращения поднятия удерживающей рамы 14 относительно фиксированной рамы 15.
А именно, удерживающая рама 14 может альтернативно располагаться в первой конфигурации, где она связана скользящим образом с фиксированной рамой 15, и во второй конфигурации, где она выходит из зацепления с фиксированной рамой 15.
Удобно, что при расположении изделия 2 в виде плиты на удерживающей раме 14 захватным узлом 5 удерживающая рама 14 зацепляется с фиксированной рамой 15.
Удерживающая рама 14, с другой стороны, выходит из зацепления с фиксированной рамой 15, когда, например, ее необходимо отвести из рабочей зоны 7.
Предпочтительно средства 18 зацепления включают:
- направляющие механизмы 19, связанные с одной из фиксированной рамы 15 и удерживающей рамы 14; и
- средства 20 для скольжения, связанные с другой из фиксированной рамы 15 и удерживающей рамы 14, причем средства 20 для скольжения имеют возможность зацепления съемным образом с направляющими механизмами 19.
В конкретных вариантах осуществления, показанных на фигурах, направляющие механизмы 19 связаны с фиксированной рамой 15, а средства 20 для скольжения связаны с удерживающей рамой 14.
А именно, направляющие механизмы 19 содержат по меньшей мере одну пару направляющих элементов 21, которые по существу имеют C-образую форму, чтобы определять соответствующее посадочное место, проходящее вдоль направления скольжения S и расположенное на одной линии.
Средства 20 для скольжения содержат по меньшей мере одну пару роликов 22, например, колес, каждый из которых вставляется внутрь соответствующего посадочного места.
А именно, ролики 22 скользят внутри посадочного места вдоль направления скольжения S в результате зацепления удерживающей рамы 14 с фиксированной рамой 15.
В то же время верхняя часть посадочного места предотвращает выскальзывание роликов 22 из направляющих элементов 21 из-за движения вверх.
Таким образом, удерживающая рама 14 может скользить относительно фиксированной рамы 15 без поднятия вверх.
Ролики 22 скользят внутри соответствующих посадочных мест, пока они не войдут в контакт с конечным стопорным элементом, расположенным на одной крайней части каждого направляющего элемента 21.
Удобно, что рама 13 содержит запорные средства 23 для запирания удерживающей рамы 14 относительно фиксированной рамы 15 вдоль направления скольжения S.
Более подробно, запорные средства 23 содержат запорный элемент 24, связанный с удерживающей рамой 14, и могут вставляться внутрь опорного седла 25, связанного с фиксированной рамой 15.
Удобно, что запорный элемент 24 и опорное седло 25 выровнены относительно друг друга, когда удерживающая рама 14 достигает концевого стопорного положения, определенного концевым стопорным элементом.
Запорный элемент 24 перемещается между запорным положением, где он вставляется внутрь опорного седла 25, и положением высвобождения, где он выходит из зацепления из опорного седла 25.
Рама 13 содержит зажимающие средства 26, образованные на удерживающей раме 14 и имеющие возможность зацепления для обеспечения поднятия и перемещения удерживающей рамы 14, когда она отцепляется от фиксированной рамы 15.
Удобно, что рама 13 содержит средства 27 удерживания изделия 2 в виде плиты, хранящегося на удерживающей раме 14.
Средства 27 удерживания связаны с удерживающей рамой 14 и имеют возможность перемещения между:
- по меньшей мере одной удерживающей конфигурацией, где они обращены к стопорному элементу 17;
- по меньшей мере одной высвобождающей конфигурацией, где они отведены от стопорного элемента 17 относительно удерживающей конфигурации, чтобы обеспечить размещение/поднятие изделия 2 в виде плиты.
Перемещение средств 27 удерживания может проводиться вручную оператором или может проводиться автоматически.
А именно, когда захватный узел 5 кладет или поднимает изделие 2 в виде плиты на раму 13 или с ней, средства 27 удерживания располагаются в высвобождающей конфигурации, чтобы не препятствовать операциям перемещения изделия 2 в виде плиты.
Аналогично, в результате расположения изделия 2 в виде плиты на раме 13 средства 27 удерживания располагаются в удерживающей конфигурации и располагаются вблизи изделия в виде плиты 2 или на нем.
Таким образом, средства 27 удерживания способны препятствовать случайному падению изделия 2 в виде плиты с рамы 13.
Работа оборудования согласно настоящему изобретению по существу является следующей.
Первые средства 6 перемещения перемещают захватный узел 5 вдоль направления перемещения A и располагают его поочередно вблизи линии 3 подачи, линии 4 выдачи и станций 8 хранения.
В частности, захватный узел 5 проводит первый подъем изделия 2 в виде плиты, поступающего с линии 3 подачи, размещение изделия 2 в виде плиты на одной из станций 8 хранения и второй подъем изделия 2 в виде плиты, который может быть таким же, как и первый подъем, или другим, с одной из станций 8 хранения для передачи его на линию 4 выдачи.
В варианте осуществления, показанном на фиг. 1 и 2, захватный узел 5 поднимает изделия 2 в виде плит непосредственно с линии 3 подачи и помещает их на соответствующие станции 8 хранения.
Захватный узел 5, при необходимости, поднимает изделия 2 в виде плит со станций 8 хранения и помещает их непосредственно на линию 4 выдачи.
Для этого средства удерживания рамы 13 хранения приводятся в высвобождающую конфигурацию для обеспечения расположения изделия 2 в виде плиты и затем перемещаются в высвобождающую конфигурацию для закрепления самого изделия в виде плиты на раме 13 хранения.
В вариантах осуществления, показанных на фиг. 3-10, транспортная линия 12 перемещает изделия 2 в виде плит, поступающие с линии 3 подачи, на станцию 8 хранения, где они поднимаются захватным узлом 5.
При необходимости, захватный узел 5 поднимает изделие 2 в виде плиты, которое необходимо направлять на линию 4 выдачи, со станции 8 хранения и помещает его на транспортную линию 12, которая перемещает его к линии 4 выдачи.
В этих вариантах осуществления, таким образом, перед первым поднятием происходит стадия перемещения изделий 2 в виде плит на транспортную линию 12 вдоль направления транспортирования C.
Это перемещение проводят, пока не будет достигнута зона погрузки, которая располагается на предварительно назначенной для загрузки станции 8 хранения, после чего захватный узел 5 располагает изделие 2 в виде плиты на предварительно назначенной для загрузки станции 8 хранения.
Второе поднятие выполняется захватным узлом 5 путем поднятия изделия 2 в виде плиты с предварительно назначенной для разгрузки станции 8 хранения, что соответствует станции 8 хранения, на которой расположено изделие 2 в виде плиты, которое необходимо перенести на линию 4 выдачи, и путем расположения самого изделия в виде плиты в зоне разгрузки транспортной линии 12, расположенной на предварительно назначенной для разгрузки станции 8 хранения.
В варианте осуществления, показанном на фиг. 7-9, подъемные средства 32 перемещают захватный узел 5 вертикально вдоль направления подъема E для доведения его до желаемой группы G1,G2 станций 8 хранения.
На практике было установлено, что описанное изобретение достигает предполагаемых целей.
В частности, подчеркивается тот факт, что оборудование обеспечивает легкое перемещение изделий в виде плит путем их хранения временно на станциях хранения на стороне захватного узла и подъема время от времени со станций хранения только тех изделий, которые требуются и должны, таким образом, быть упакованы или отгружены для продажи.
Наличие линии подачи и линии выдачи, расположенных вдоль направления перемещения захватного узла, обеспечивает перемещение изделий в виде плит согласно логике, описанной выше, очень быстрым и безопасным образом, таким образом ограничивая до минимума количество необходимых перемещений и, следовательно, также риск разрушения или повреждения.
Фактически, изделия в виде плит располагаются на станциях хранения, что обеспечивает хранение изделий в виде плит на рамах, которые могут фиксироваться к земле, при необходимости, таким образом ограничивая какую-либо разбалансировку хранящихся изделий в виде плит.
Кроме того, конкретная компоновка станций хранения вдоль рядов, расположенных вне рабочей зоны захватного узла, обеспечивает перемещение изделий в виде плит быстро и функционально, без наличия препятствий в самой рабочей зоне. Последнее, но тем не менее важное, конкретная компоновка станций хранения в группах, расположенных на нескольких уровнях, обеспечивает оптимизацию пространств и производительности логистики.
Изобретение относится к единице оборудования и способу логистики изделий в виде плит. Оборудование (1) для логистики изделий в виде плит содержит линию (3) подачи изделия (2) в виде плиты и линию (4) выдачи изделия (2) в виде плиты; роботизированный захватный узел (5) изделия (2) в виде плиты, снабженный по меньшей мере тремя степенями свободы и расположенный между линией (3) подачи и линией (4) выдачи; первые средства (6) перемещения захватного узла (5) вдоль направления перемещения (A), чтобы определять рабочую зону (7) захватного узла (5). Линия (3) подачи и указанная линия (4) выдачи по существу выровнены относительно друг друга вдоль направления перемещения (A). Оборудование также содержит множество временных станций (8) хранения изделия (2) в виде плиты, расположенных сбоку от захватного узла (5) и по существу выровненных друг относительно друга для определения по меньшей мере одного ряда (F), по существу параллельного направлению перемещения (A). Захватный узел (5) поднимает изделие (2) в виде плиты, поступающего с линии (3) подачи; располагает изделие (2) в виде плиты на одной из станций (8) хранения и поднимает изделие (2) в виде плиты с одной из станций (8) хранения и доставляет его до линии (4) выдачи. Обеспечивается легкое, безопасное и быстрое перемещение изделий в виде плит. 14 з.п. ф-лы, 13 ил.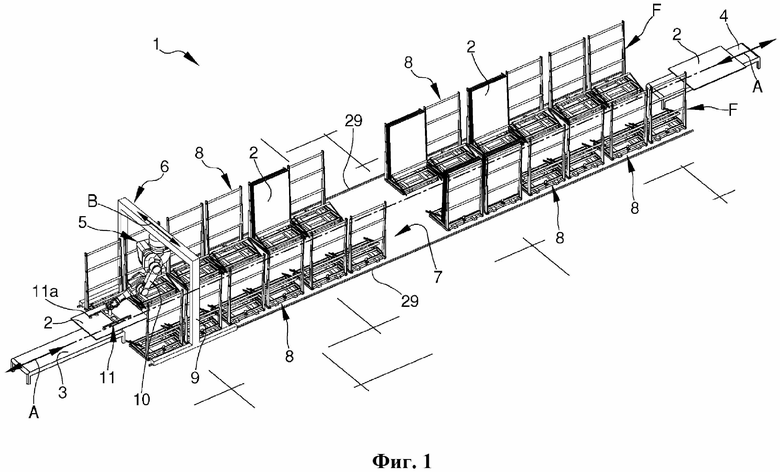
1. Оборудование (1) для логистики изделий в виде плит, содержащее:
- по меньшей мере одну линию (3) подачи по меньшей мере одного изделия (2) в виде плиты и по меньшей мере одну линию (4) выдачи указанного изделия (2) в виде плиты;
- по меньшей мере один роботизированный захватный узел (5) указанного изделия (2) в виде плиты, снабженный по меньшей мере тремя степенями свободы и расположенный между указанной линией (3) подачи и указанной линией (4) выдачи;
- первые средства (6) перемещения указанного захватного узла (5) вдоль по меньшей мере одного направления перемещения (А), чтобы определять по меньшей мере одну рабочую зону (7) указанного захватного узла (5);
в котором
указанная линия (3) подачи и указанная линия (4) выдачи по существу выровнены относительно друг друга вдоль указанного направления перемещения (А);
в котором указанное оборудование (1) содержит
- множество временных станций (8) хранения указанного изделия (2) в виде плиты, расположенных сбоку от указанного захватного узла (5) и по существу выровненных друг относительно друга для определения по меньшей мере одного ряда (F), по существу параллельного указанному направлению перемещения (А), причем указанный захватный узел (5):
- поднимает указанное изделие (2) в виде плиты, поступающее с указанной линии (3) подачи;
- размещает указанное изделие (2) в виде плиты по меньшей мере на одной из указанных станций (8) хранения и
- поднимает указанное изделие (2) в виде плиты по меньшей мере с одной из указанных станций (8) хранения и доставляет его до указанной линии (4) выдачи,
характеризуется тем, что указанные первые средства (6) перемещения включают в себя по меньшей мере одну пару направляющих рельсов (29), простирающихся параллельно указанному направлению перемещения (А), и по меньшей мере одну несущую раму (30), связанную подвижно с указанной парой направляющих рельсов (29) и поддерживающую указанный захватный узел (5),
тем, что она включает в себя по меньшей мере одну транспортную линию (12) указанного изделия (2) в виде плиты, расположенную внутри указанной рабочей зоны (7) и находящуюся между указанной линией (3) подачи и указанной линией (4) выдачи,
и тем, что указанная транспортная линия (12) расположена на меньшей высоте, чем указанная несущая рама (30), так что она проходит под ней, причем указанная несущая рама (30) и указанная транспортная линия (12) являются подвижными относительно друг друга вдоль указанного направления транспортирования (С) и вдоль указанного направления перемещения (А) соответственно.
2. Оборудование (1) по п. 1, отличающееся тем, что указанный ряд (F) расположен на кромке периметра указанной рабочей зоны (7).
3. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что указанные рельсы (29) расположены на противоположной стороне относительно указанной рабочей зоны (7) относительно указанного по меньшей мере одного ряда (F).
4. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что включает в себя по меньшей мере два указанных ряда (F), расположенных напротив друг друга относительно захватного узла (5), причем рабочая зона (7) расположена между указанными рядами (F), и что указанные рельсы (29) расположены внутри указанной рабочей зоны (7) и располагаются между указанными рядами (F).
5. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что включает в себя по меньшей мере два указанных ряда (F), расположенных напротив друг друга относительно указанного захватного узла (5), причем указанная рабочая зона (7) расположена между указанными рядами (F), а также благодаря тому, что по меньшей мере один из указанных рядов (F) содержит по меньшей мере две группы (G1, G2) указанных станций (8) хранения, расположенных друг над другом.
6. Оборудование (1) по п. 5, отличающееся тем, что оно содержит подъемные средства (32), расположенные между указанной несущей рамой (30) и указанным захватным узлом (5) и приспособленные для перемещения указанного захватного узла (5) вдоль по меньшей мере одного по существу вертикального направления подъема (Е) для доставки его к каждой из указанных групп (G1, G2).
7. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что указанная транспортная линия (12) перемещается вдоль направления транспортирования (С), по существу параллельного указанному направлению перемещения (А), причем указанный захватный узел (5) поднимает указанное изделие (2) в виде плиты с указанной транспортной линии (12) в ходе ее перемещения вперед вдоль указанного направления транспортирования (С) на одной из указанных станций (8) хранения, помещает указанное изделие (2) в виде плиты на указанные станции (8) хранения и поднимает изделие (2) в виде плиты с одной из указанных станций (8) хранения и высвобождает его на указанную транспортную линию (12) на станции (8) хранения, с которой его поднимали.
8. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что указанная транспортная линия (12) по существу выровнена с указанной линией (3) подачи и с указанной линией (4) выдачи.
9. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что указанная транспортная линия (12) совпадает с указанной линией (3) подачи и с указанной линией (4) выдачи.
10. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что включает в себя по меньшей мере одну опорную поверхность (31) указанного захватного узла (5), которая фиксируется вместе с указанной несущей рамой (30) по меньшей мере вдоль указанного направления перемещения (А) и благодаря тому, что указанная транспортная линия (12) располагается на более низкой высоте, чем указанная опорная поверхность (31).
11. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что указанные рельсы (29) располагаются между по меньшей мере одним из указанных рядов (F) и указанной транспортной линией (12).
12. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что оно содержит вторые средства перемещения указанного захватного узла (5) вдоль по меньшей мере одного направления регулирования (В), перпендикулярного указанному направлению перемещения (А).
13. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что оно содержит множество указанных захватных узлов (5), расположенных последовательно друг за другом вдоль указанного направления перемещения (А) и имеющих возможность перемещения вдоль самого направления перемещения независимо друг от друга.
14. Оборудование (1) по любому одному или более из предыдущих пунктов, отличающееся тем, что указанный захватный узел (5) содержит средства (11) для захвата указанного изделия (2) в виде плиты.
15. Оборудование (1) по п. 14, отличающееся тем, что указанные средства (11) для захвата содержат средства безопасности, приспособленные для предотвращения падения указанного изделия (2) в виде плиты.
| EA 201590541 A1, 31.08.2015 | |||
| US 6059092 A, 09.05.2000 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| DE 19945338 A1, 12.04.2001 | |||
| Кормовой стол | 1980 |
|
SU1021448A1 |

