Группа изобретений относится к области радиотехники и может быть использована в фискальных системах контроля местоположения судов, в качестве альтернативного способа определения местоположения судна, в частности, для детектирования локальной подмены сигналов глобальных навигационных спутниковых систем ГЛОНАСС, GPS, Galileo, BeiDou, при выходе из строя судового приемника глобальных навигационных спутниковых сигналов, а также для определения местоположения судна при отключении судового транспондера автоматической идентификационной системы (АИС).
Из уровня техники известны способы определения местоположения судна на основе сигналов автоматической идентификационной системы (АИС), из которых наиболее близким аналогом заявленного способа является автономная навигационная система позиционирования для судна с автоматической идентификационной системой (см. CN102305936, опубл. 04.01.2012) (1). Система включает в себя систему береговых опорных станций автоматической идентификационной системы (АИС) с высокоточной синхронизацией времени, судовое навигационное терминальное оборудование автоматической идентификационной системы (АИС) и синхронизацию по атомным часами с множественной точностью; система опорных береговых станций АИС с множеством опорных источников, совместно использующие самоорганизацию, исключительно высокоточную синхронизацию по атомным часам, и используемую для отправки навигационного сообщения и измерения несущей волны путем совместного использования и исключительно использования беспроводного канала автоматической идентификационной системы (АИС); навигационное терминальное оборудование судна автоматической идентификационной системы (АИС) содержит беспроводной приемный модуль, модуль обработки измерения сигнала и основной модуль управления; беспроводной приемный модуль используется для приема различных навигационных сообщений и измерения вариаций сигнала несущей волны; модуль обработки измерения сигнала используется для измерения несущей волны, извлечения сообщений, разрешения позиционирования и представления результата позиционирования в основной модуль управления; и основной модуль управления используется для вывода и применения результата позиционирования.
Недостатками ближайшего аналога (1) является привязка к береговой инфраструктуре АИС, необходимость модернизации как береговых станций, так и судового оборудования. Аналог использует метод определения координат, основанный на определении времени задержки сигнала берег - судно.
Наиболее близким аналогом заявленного устройства для определения местоположения судна на основе сигналов автоматической идентификационной системы является радиолокационная вспомогательная система, основанная на системе автоматической идентификации судна (см. CN201548689, опубл. 11.08.2010)(2). Радиолокационная вспомогательная система включает в себя систему автоматической идентификации судна (АИС), хост-машину для обработки радиолокационных данных и приемник радиолокационной станции, в которой система автоматической идентификации судна (АИС) используется для получения информации о судне, передаваемой судами, и передачи полученной информации судна в обработку радиолокационных данных хост-машины, система автоматической идентификации судна (АИС) и радиолокационный приемник соответственно электрически соединены с хост-машиной обработки радиолокационных данных, а система автоматической идентификации судна (АИС) электрически соединена с хост-машиной обработки принимающей радары через последовательный интерфейс.
Недостатком близкого аналога (2) является отсутствие функции автономного определения местоположения по сигналам системы АИС. Аналог (2) предназначен, прежде всего, для информационной подсветки объектов, обнаруженных судовым радаром, а также определения судов, не излучающих сигналов АИС.
Техническим результатом заявленной группы изобретений является определение местоположения судна только на основе анализа характеристик сигналов АИС, излучаемых объектами в зоне радиовидимости устройства, без использования аппаратуры спутниковой навигации данного судна.
Заявленный технический результат достигается посредством создания способа определения собственного местоположения судна на основе сигналов автоматической идентификационной системы, включающего определение углов прихода сигналов автоматической идентификационной системы от одного или более независимых источников сигнала автоматической идентификационной системы, в качестве которых могут быть использованы суда, буи или береговые станции автоматической идентификационной системы, методом радиопеленгации с использованием двух или более разнесенных антенн, установленных на объекте с искомыми координатами, определение географических координат этих источников путем декодирования и анализа информации, содержащийся в сигналах автоматической идентификационной системы от этих источников, и последующее вычисление собственного местоположения объекта на основе определенных координат источников сигнала автоматической идентификационной системы и углов между ними одним из следующих методов: при наличии данных о курсе и скорости судна с искомыми координатами разновременных измерений углов прихода сигналов от одного источника сигнала автоматической идентификационной системы применяется используемый в навигации метод крюйс-пеленга, при наличии данных о курсе объекта с искомыми координатами и данных об углах прихода сигналов автоматической идентификационной системы от двух источников используется применяемый в навигации метод пеленга двух ориентиров, а при наличии данных об углах прихода сигналов от трех или более источников сигналов автоматической идентификационной системы, используется применяемый в геодезии метод однократной или многократной обратной засечки соответственно.
Заявленный технический результат достигается также посредством создания устройства для определения собственного местоположения судна на основе характеристик сигналов автоматической идентификационной системы, содержащего не менее двух штыревых антенн с круговой диаграммой направленности, размещенных на расстоянии не менее λ/2 друг от друга, где  - длина волны сигналов автоматической идентификационной системы, при этом каждая антенна соединена с полосовым фильтром, который соединен с аналого-цифровым преобразователем, каждый из которых соединен с приемным устройством, содержащим фазовый пеленгатор, обеспечивающий вычисление углов прихода радиосигналов, путем обработки сигналов с каждой антенны, содержащих одно и то же сообщение автоматической идентификационной системы, а также процессор, обеспечивающий демодуляцию сообщений, выделение из них координатной информации, и расчет на основе этой информации и опциональной информации собственного местоположения.
- длина волны сигналов автоматической идентификационной системы, при этом каждая антенна соединена с полосовым фильтром, который соединен с аналого-цифровым преобразователем, каждый из которых соединен с приемным устройством, содержащим фазовый пеленгатор, обеспечивающий вычисление углов прихода радиосигналов, путем обработки сигналов с каждой антенны, содержащих одно и то же сообщение автоматической идентификационной системы, а также процессор, обеспечивающий демодуляцию сообщений, выделение из них координатной информации, и расчет на основе этой информации и опциональной информации собственного местоположения.
Заявленное изобретение проиллюстрировано следующими схемами:
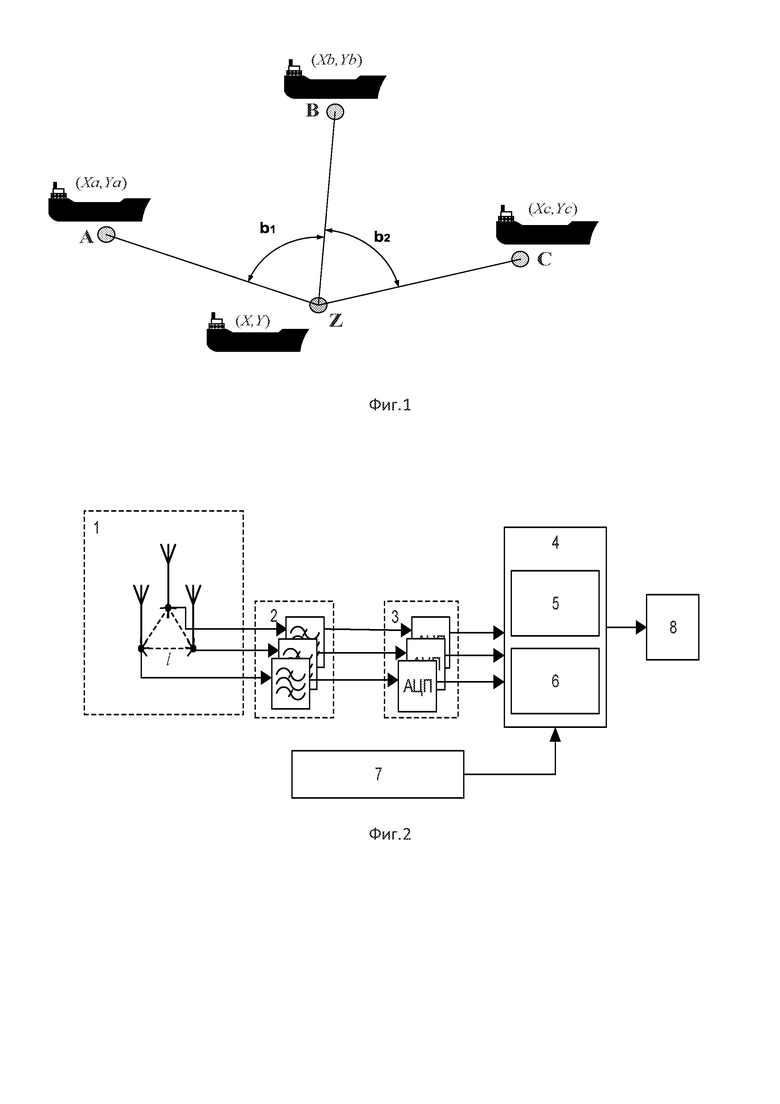
Фиг.1 – схема определения местоположения судна;
Фиг.2 – схема детектора характеристик сигналов автоматической идентификационной системы с функцией определения угла прихода сигнала автоматической идентификационной системы.
На фиг.2 позиции обозначают следующее:
1 – антенны;
2 – полосовые фильтры;
3 – аналого-цифровые преобразователи;
4 – приемное устройство, содержащее фазовый пеленгатор и процессор;
5 – фазовый пеленгатор;
6 – процессор;
7 – источник информации о собственном курсе и скорости судна;
8 – технические средства контроля.
Заявленная группа изобретений представляет собой способ определения координат судна с использованием специальной приемной аппаратуры сигналов автоматической идентификационной системы (АИС), которую предлагается включить в состав технических средства контроля (ТСК) рыболовных судов. Основным отличием данной аппаратуры от обычного приемника сигналов АИС является антенная система, позволяющая определить углы прихода сигналов путем применения алгоритмов анализа задержки фазы, а также использование этой информации в комплексе с данными о расположении источников этих сигналов для определения собственного местоположения.
Предлагаемый подход к определению координат основывается на следующих положениях:
1) Знание координат источников сигнала и направления прихода этих сигналов позволяет определить положение приемника, и, соответственно, судна.
2) Вокруг судна в зоне радиовидимости приемника АИС (до 70 км) с ненулевой вероятностью есть более одного источника сигнала АИС (судно, буй, береговая станция), передающие свои координаты в сообщениях АИС типов 1, 2, 3, 4, 11, 18, 21, 27, и не подверженных возможному воздействию средств локальной подмены спутниковых навигационных сигналов на судне с искомыми координатами.
3) Известен ряд методов радиопеленгации, позволяющих определить направления прихода сигналов от каждого из судов.
Исходными данными для выбора метода определения местоположения целевого судна могут быть: информация о скорости, курс судна и количество судов в зоне радиовидимости. В зависимости от набора доступных исходных данных, для определения местоположения судна могут быть использованы следующие известные методы вычисления:
1) при наличии данных о скорости и курсе данного судна, и регистрации углов прихода сигналов АИС от 1 источника, можно определить местоположение данного судна методом крюйс-пеленга, путем обработки разновременных измерений;
2) при наличии данных о курсе и углах прихода АИС сигналов от 2-х источников можно использовать метод пеленга двух ориентиров;
3) при регистрации углов прихода сигналов АИС от 3-х источников можно определить место методом обратной однократной засечки;
4) при регистрации углов прихода сигналов АИС от 4-х источников и более, используется метод обратной многократной засечки.
Для реализации описанного способа определения местоположения судна, предлагается следующая схема приемника АИС, совмещенного с системой радиопеленгации. Сигналы с двух или более антенн (1), находящихся на расстоянии  , где λ - длина волны на частотах автоматической идентификационной системы, каждая из которых имеет круговую диаграмму направленности и представляет собой
, где λ - длина волны на частотах автоматической идентификационной системы, каждая из которых имеет круговую диаграмму направленности и представляет собой  штырь, передаются в высокочастотный тракт приемника, где сигнал от каждой антенны независимо фильтруется полосовым фильтром (2), полученный аналоговый сигнал на частоте АИС оцифровывается аналого-цифровым преобразователем (3), после этого оцифрованный сигнал АИС передается в приемное устройство (4). Один из сигналов обрабатывается, так же как и в обычном приемнике АИС, при этом определяется начало и конец каждого сообщения АИС. Эта информация передается в модуль приемного устройства, содержащий фазовый пеленгатор (5). Этот модуль совместно обрабатывает все сигналы, содержащие одно и то же сообщение АИС, и выдает искомый угол. Навигационная задача решается процессором устройства (6) с привлечением при необходимости информации о собственном курсе и скорости судна.
штырь, передаются в высокочастотный тракт приемника, где сигнал от каждой антенны независимо фильтруется полосовым фильтром (2), полученный аналоговый сигнал на частоте АИС оцифровывается аналого-цифровым преобразователем (3), после этого оцифрованный сигнал АИС передается в приемное устройство (4). Один из сигналов обрабатывается, так же как и в обычном приемнике АИС, при этом определяется начало и конец каждого сообщения АИС. Эта информация передается в модуль приемного устройства, содержащий фазовый пеленгатор (5). Этот модуль совместно обрабатывает все сигналы, содержащие одно и то же сообщение АИС, и выдает искомый угол. Навигационная задача решается процессором устройства (6) с привлечением при необходимости информации о собственном курсе и скорости судна.
Заявленная группа изобретений решает проблему возможных искажений реальных перемещений судна путем локальной подмены навигационных сигналов ГЛОНАСС, GPS, Galileo, BeiDou за счет вычисления положения судна альтернативным способом. Проблема таких детектирования таких искажений надзорными органами является актуальной, поскольку оборудование для подмены сигналов глобальных навигационных спутниковых систем становится все более доступным, и может стать распространенным инструментом для сокрытия истинного местонахождения судна при браконьерстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ СУДОВ, ИСПОЛЬЗУЮЩАЯ ОБЩЕЕ МОРСКОЕ ИНФОРМАЦИОННОЕ ПРОСТРАНСТВО | 2013 |
|
RU2548646C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| Способ автоматического определения местоположения транспортного средства по радиолокационным ориентирам | 2017 |
|
RU2658679C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2023 |
|
RU2827103C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СУДНА И ХАРАКТЕРИСТИК ЕГО ДВИЖЕНИЯ | 2013 |
|
RU2546846C2 |
| Способ определения собственного местоположения объекта в пространстве | 2023 |
|
RU2815168C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
Группа изобретений относится к области радиотехники и может быть использована в фискальных системах контроля местоположения судов в качестве альтернативного способа определения координат, в частности, для детектирования локальной подмены сигналов глобальных навигационных спутниковых систем (ГЛОНАСС, GPS, Galileo, BeiDou). Достигаемый технический результат – определение местоположения судна на основе анализа характеристик сигналов автоматической идентификационной системы (АИС), излучаемых объектами в зоне радиовидимости устройства, без использования аппаратуры спутниковой навигации. Определение местоположения судна производится путем детектирования направлений прихода сигналов АИС от одного или более источников (судов, буев, береговых станций АИС), выделения из этих сигналов информации о местоположении этих источников и последующего решения задачи определения собственных координат, для чего используется радиотехническое устройство, позволяющее определять необходимые характеристики сигналов АИС и реализующее алгоритмы расчета собственных координат. 2 н.п. ф-лы, 2 ил.
1. Способ определения собственного местоположения судна на основе сигналов автоматической идентификационной системы, включающий определение углов прихода сигналов автоматической идентификационной системы от одного или более независимых источников сигнала автоматической идентификационной системы, в качестве которых используют суда, буи или береговые станции автоматической идентификационной системы, методом радиопеленгации с использованием двух или более разнесенных антенн, установленных на объекте с искомыми координатами, определение географических координат этих источников путем декодирования и анализа информации, содержащейся в сигналах автоматической идентификационной системы от этих источников, и последующее вычисление собственного местоположения объекта на основе определенных координат источников сигнала автоматической идентификационной системы и углов между ними одним из следующих методов: при наличии данных о курсе и скорости судна с искомыми координатами разновременных измерений углов прихода сигналов от одного источника сигнала автоматической идентификационной системы применяется используемый в навигации метод крюйс-пеленга, при наличии данных о курсе объекта с искомыми координатами и данных об углах прихода сигналов автоматической идентификационной системы от двух источников используется применяемый в навигации метод пеленга двух ориентиров, а при наличии данных об углах прихода сигналов от трех или более источников сигналов автоматической идентификационной системы используется применяемый в геодезии метод однократной или многократной обратной засечки соответственно.
2. Устройство для определения собственного местоположения судна на основе характеристик сигналов автоматической идентификационной системы, содержащее не менее двух штыревых антенн с круговой диаграммой направленности, размещенных на расстоянии не менее  друг от друга, где λ - длина волны сигналов автоматической идентификационной системы, при этом каждая антенна соединена с полосовым фильтром, который соединен с аналого-цифровым преобразователем, каждый из которых соединен с приемным устройством, содержащим фазовый пеленгатор, обеспечивающий вычисление углов прихода радиосигналов путем обработки сигналов с каждой антенны, содержащих одно и то же сообщение автоматической идентификационной системы, а также процессор, обеспечивающий демодуляцию сообщений, выделение из них координатной информации и расчет на основе этой информации и опциональной информации собственного местоположения.
друг от друга, где λ - длина волны сигналов автоматической идентификационной системы, при этом каждая антенна соединена с полосовым фильтром, который соединен с аналого-цифровым преобразователем, каждый из которых соединен с приемным устройством, содержащим фазовый пеленгатор, обеспечивающий вычисление углов прихода радиосигналов путем обработки сигналов с каждой антенны, содержащих одно и то же сообщение автоматической идентификационной системы, а также процессор, обеспечивающий демодуляцию сообщений, выделение из них координатной информации и расчет на основе этой информации и опциональной информации собственного местоположения.
| CN 201548689 U, 11.08.2010 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СУДНА И ХАРАКТЕРИСТИК ЕГО ДВИЖЕНИЯ | 2013 |
|
RU2546846C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| US 5579285 A, 26.11.1996 | |||
| JP 2004191125 A, 08.07.2004 | |||
| CN 105654133 A, 08.06.2016. | |||

