Изобретение относится к способам дистанционного охранного мониторинга маршрутов движения на местности и может быть использовано в случае совместного применения телевизионной камеры (ТВ-камеры) и пассивного оптико-электронного средства обнаружения (СО), управляющего режимами ее работы, когда непрерывная передача видеоизображения ТВ-камерой, питающейся от автономного источника, является технически нецелесообразной.
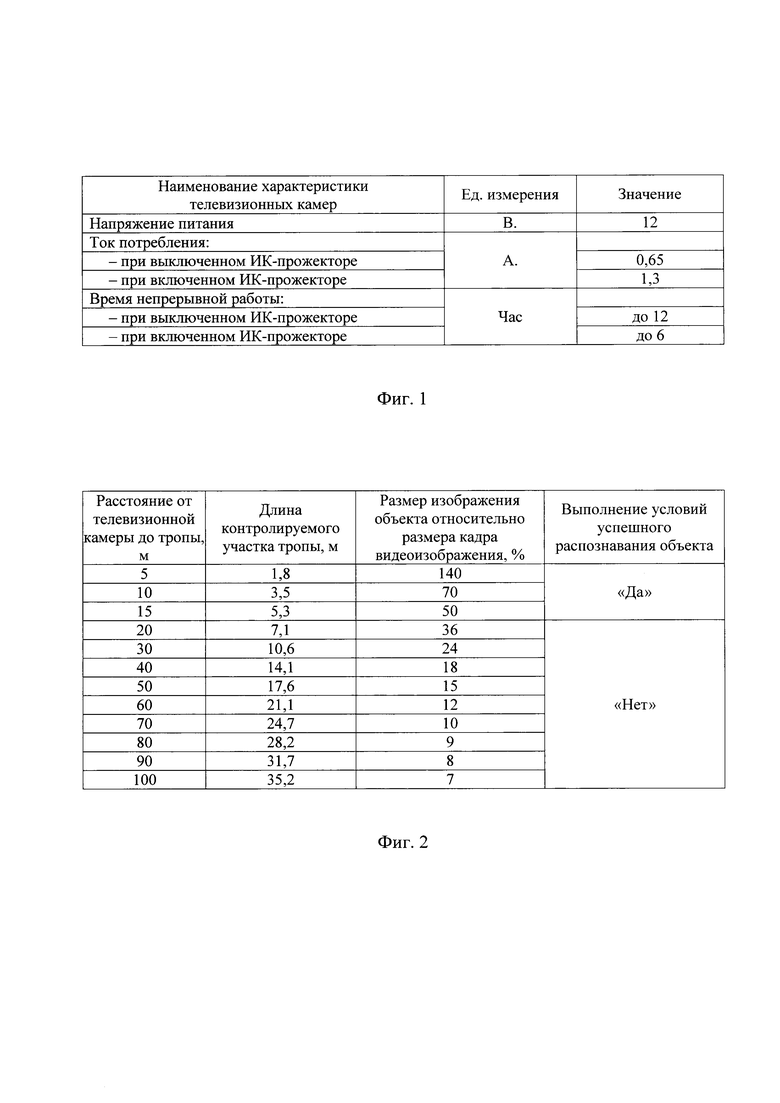
Одной из задач дистанционного охранного мониторинга маршрутов движения на местности является распознавание объектов, обнаруживаемых СО, заключающееся в определении класса таких объектов [1]. Как правило, эта задача решается с помощью ТВ-камер. На практике для охранного мониторинга маршрутов движения нарушителей на местности широко применяются разведывательно-сигнализационные комплексы (РСК) с передачей информации о состоянии СО и видеоизображения от ТВ-камер по радиоканалу [2, 3]. Характеристики ТВ-камер, применяемых для распознавания объектов в составе РСК, известны (фиг. 1). С учетом высокого энергопотребления ТВ-камер в режиме передачи видеоизображения и ограниченной емкости применяемых автономных источников питания, время их непрерывной работы составляет не более 12 часов, а при включенном инфракрасном прожекторе не более 6 часов (фиг. 1). В тоже время, тактика применения средств, входящих в состав РСК, подразумевает работу этих средств без замены источника питания до нескольких месяцев, поэтому большую часть времени ТВ-камера работает в ждущем режиме, ее включение в режим передачи видеоизображения происходит по команде управления от СО, при обнаружении им объекта [2, 3].
ТВ-камеры устанавливаются на наиболее вероятных маршрутах движения нарушителей - дорогах (тропах) [4]. Емкость радиосети РСК ограничена несколькими десятками средств, поэтому лицо, принимающее решение на развертывание РСК, вынуждено рационально использовать СО, и как правило, для управления ТВ-камерой может использовать не более одного СО [1, 2].
РСК развертываются на неподготовленной в инженерном отношении местности, на которой не применяется искусственного освещения в темное время суток, а также не возводятся заграждения для сдерживания действий объектов [2, 3]. Поэтому к снижению вероятности успешного распознавания объектов на местности приводят следующие условия:
- низкая освещенность в зоне наблюдения ТВ-камер, особенно в темное время суток и в условиях ограниченной видимости (дождь, снег, туман);
- свободное, без задержек перемещение объекта на местности, а следовательно короткое по времени пребывание его в зоне видимости ТВ-камер.
Согласно широко распространенной методике оценки эффективности охранного телевидения, для успешного распознавания оператором обнаруженного на местности объекта по его видеоизображению, необходимо одновременное выполнение следующих требований к видеоизображению:
- размер изображения объекта должен составлять не менее 50% относительно размера всего кадра [5, 6];
- видеоизображение должно передаваться в течение всего времени нахождения объекта в зоне наблюдения (t, с).
Требуемый размер изображения объекта на экране монитора обеспечивается расстоянием между ТВ-камерой до участка тропы, по которому движется объект. Для ТВ-камер из состава РСК (формат матрицы 1/2'' и фокусное расстояние 20 мм) это расстояние составляет не более 10-15 м (фиг. 2). Значение расстояния между ТВ-камерой до участка тропы, по которому движется объект, особенно важно в темное время суток, когда условия видимости ограничены дальностью действия встроенной ИК-подсветки (не более 20 м).
Передача видеоизображения в течение всего времени нахождения объекта в зоне наблюдения может быть обеспечена или непрерывной работой ТВ-камеры (что не приемлемо для ТВ-камер в составе РСК) или ее своевременным включением от управляющей команды от СО.
С учетом характеристик ТВ-камер, применяемых в составе РСК, и нахождения их в ждущем режиме до подачи команды на включение от СО, для создания условий успешного распознавания оператором объекта на местности по его видеоизображению, необходимо обеспечить:
- расстояние от ТВ-камеры до участка тропы, по которому движется объект не более 10-15 м (фиг. 2);
- своевременное включение ТВ-камеры (до захода объекта в зону наблюдения).
Известно несколько способов обнаружения и распознавания объекта, отличающихся друг от друга степенью соответствия требуемым условиям и затратами на их достижение [1].
Известен способ, заключающийся в ориентировании ТВ-камеры перпендикулярно контролируемому прямому участку тропы на удалении 80 м и работе ТВ-камеры основное время в ждущем режиме; установке одного СО вне зоны наблюдения ТВ-камеры вблизи ее границы, так что бы зона обнаружения (ЗО) пересекала середину участка тропы ограниченного зоной наблюдения; обнаружении СО движущегося по тропе объекта при пересечении им ЗО и передаче на ТВ-камеру команды управления на ее включение в режим передачи видеоизображения; передаче видеоизображения ТВ-камерой в течение предварительно заданного интервала времени на систему сбора и обработки информации; распознавании оператором объекта по видеоизображению на мониторе системы сбора и обработки информации (фиг. 3).
Другой известный способ, заключается в ориентировании ТВ-камеры перпендикулярно контролируемому прямому участку тропы на удалении 15 м и работе ТВ-камеры основное время в ждущем режиме; установке двух СО вне зоны наблюдения ТВ-камеры так что бы объект, движущийся по тропе в любом направлении обнаруживался одним из СО до захода в зону наблюдения на расстоянии, которое пройдет нарушитель за время задержки включения ТВ-камеры; обнаружении одним из СО движущегося по тропе объекта при пересечении им ЗО и передаче на ТВ-камеру команды управления на ее включение в режим передачи видеоизображения; передаче видеоизображения ТВ-камерой в течение предварительно заданного интервала времени на систему сбора и обработки информации; распознавании оператором объекта по видеоизображению на мониторе системы сбора и обработки информации (фиг. 4).
В первом указанном способе необходимые условия успешного распознавания оператором обнаруженного объекта по его видеоизображению не выполняются (фиг. 3, 5):
- расстояние от ТВ-камеры до участка тропы, по которому движется объект (S) в несколько раз превышает требуемое (не более 10-15 м) и составляет до 80 м (фиг. 2);
- ТВ-камера включается только после прохождения объекта до середины ее зоны наблюдения.
Второй указанный способ обеспечивает необходимые условия успешного распознавания оператором обнаруженного объекта по его видеоизображению:
- расстояние от ТВ-камеры до участка тропы, по которому движется объект (S) не превышает требуемое (не более 10-15 м);
- ТВ-камера включается до появления объекта в ее зоне наблюдения. Однако, для управления режимами работы ТВ-камеры применяются
два СО (фиг. 4, 5).
Также, в обоих способах перед развертыванием СО требуется инженерная подготовка участка местности, включающая работы по очистке сектора, в котором будет находиться его ЗО, от растительности: вырубку деревьев и кустарника, выкашивание высокой травы. Данные работы являются трудозатратными, например, на спиливание твердолиственного дерева диаметром до 40 см заподлицо с землей требуется до 0,41 чел*час, свыше 40 см - до 0,511 чел*час.[7]
Целью изобретения является обеспечение условий успешного распознавания оператором объекта по его видеоизображению за счет установки ТВ-камеры напротив участка тропы, по которому движется объект, на расстоянии не более 10-15 м, своевременного (до захода объекта в зону наблюдения) включения ТВ-камеры с применением только одного средства обнаружения для управления ТВ-камерой и снижение трудозатрат на инженерную подготовку участка местности.
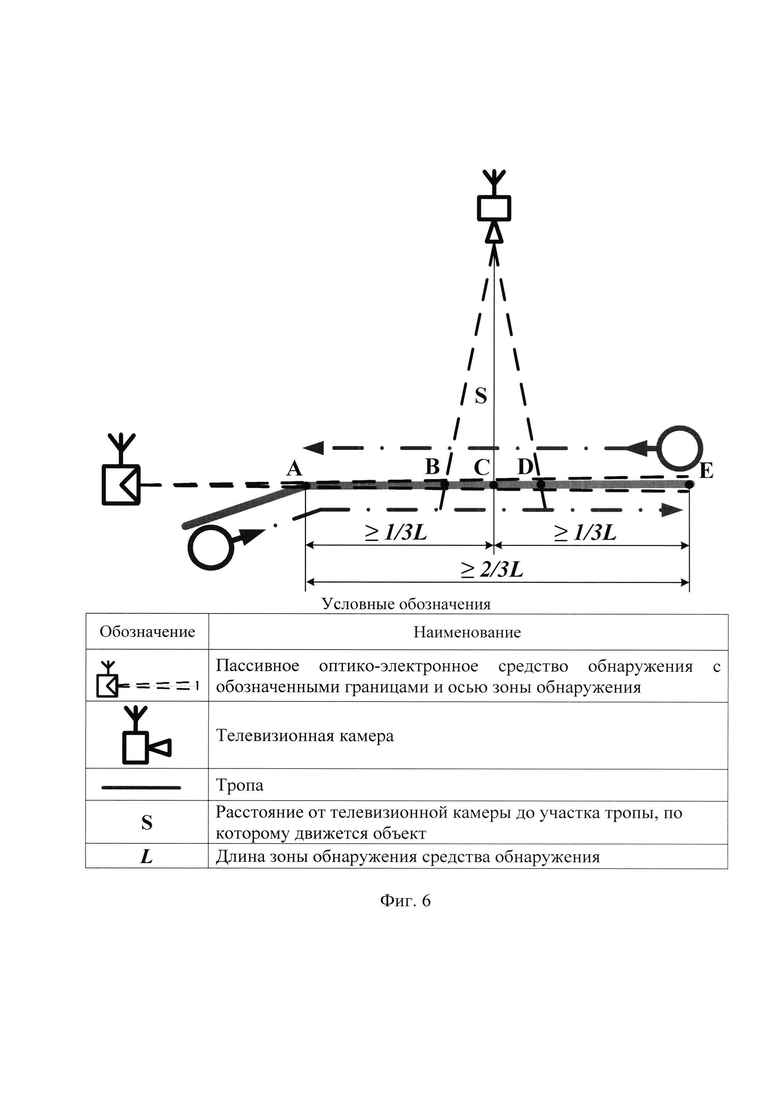
Для достижения поставленной цели разработан способ обнаружения и распознавания объекта, заключающийся в развертывании СО с внешней стороны изгиба тропы таким образом, чтобы ось его ЗО лежала на прямом участке тропы и не менее 2/3 длинны ЗО закрывало участок тропы; установке ТВ-камеры напротив прямого участка тропы на расстоянии, обеспечивающем размер изображения объекта относительно размера всего кадра не менее 50%; пересечении оптической осью ТВ-камеры середины участка тропы, закрытого ЗО СО; работе ТВ-камеры основное время в ждущем режиме; обнаружении СО движущегося по тропе объекта при пересечении им ЗО и передаче на ТВ-камеру команды управления на ее включение в режим передачи видеоизображения; передаче видеоизображения ТВ-камерой в течение предварительно заданного интервала времени на систему сбора и обработки информации; распознавании оператором объекта по видеоизображению на мониторе системы сбора и обработки информации (фиг. 5, 6).
Как правило, тропа, проходящая по участку местности, не является абсолютно прямой, одним из наиболее часто встречаемых элементов дорожной сети является изгиб дороги либо тропы (дугообразный поворот, искривление - состоящее из двух смежных прямых соединенных круговой кривой) [8].
СО развертывается с внешней стороны изгиба тропы таким образом, чтобы ось его ЗО лежала на прямом участке тропы, и не менее 2/3 длины ЗО закрывало участок тропы. Отсутствие растительности на тропе снижает трудозатраты инженерной подготовки участка местности при развертывании СО.
ТВ-камера устанавливается напротив прямого участка тропы на удалении 10-15 м, обеспечивающим размер изображения объекта относительно кадра не менее 50%.
Оптическая ось зоны наблюдения ТВ-камеры проходит посередине участка тропы, закрытого ЗО СО. Благодаря предложенной схеме развертывания СО и ТВ-камеры при любом из двух направлений движения по тропе объект сначала обнаруживается СО, а затем уже попадает в зону наблюдения ТВ-камеры. После пересечения ЗО объект проходит расстояние АВ либо ED в зависимости от направления движения, которое составляет не менее (фиг. 6):

где АВ (ED) - расстояние, которое проходит объект с момента пересечения ЗО СО до захода его в зону наблюдения ТВ-камеры, м;
АС (ЕС) - расстояние от точки пересечения ЗО объектом до точки пересечения оптической оси ТВ-камеры с тропой, м;
BD - ширина зоны наблюдения ТВ-камеры на расстоянии 10-15 м, м.
С учетом того, что ширина зоны наблюдения ТВ-камеры (BD) на расстоянии 10-15 м составляет 5 м (фиг. 2, 6), расстояние от точки пересечения ЗО объектом до точки пересечения оптической оси ТВ-камеры с тропой АС(ЕС) - не менее 17 м (при длине ЗО - 50 м), численное значение расстояния, которое проходит объект с момента пересечения ЗО СО до захода его в зону наблюдения ТВ-камеры составит:

Время, с момента обнаружения объекта СО до захода в зону наблюдения ТВ-камеры составит:

где Т - время, с момента обнаружения объекта СО до его захода в зону наблюдения ТВ-камеры, с;
VMAX - максимально возможная скорость движения нарушителя для данного участка тропы, м/с.
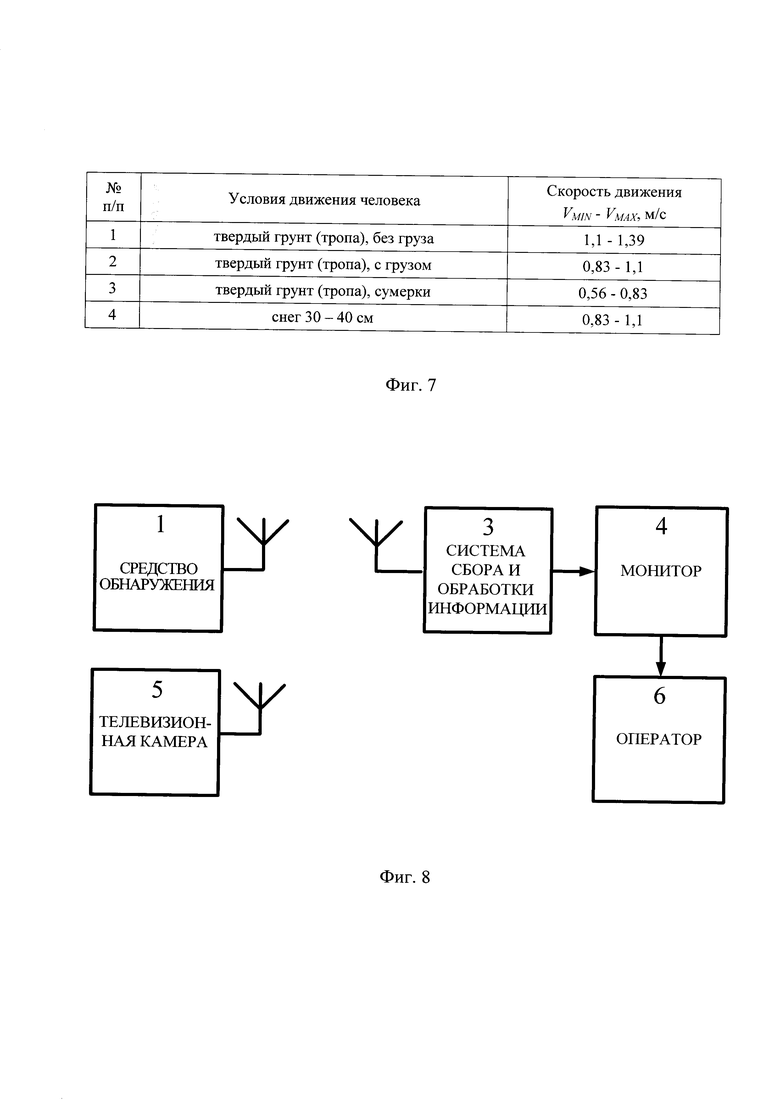
Зависимость скорости движения человека от условий местности определена практически, известна и подтверждена на основе экспериментальных данных (фиг. 7) [9]. Максимальная скорость нарушителя может составлять 1,39 м/с. Тогда численное значение времени, с момента обнаружения объекта СО до захода в зону наблюдения ТВ-камеры составит:

В РСК включение ТВ-камеры в режим передачи видеоизображения по команде СО происходит с задержкой по времени до 5 секунд с момента обнаружения СО объекта (tЗ), с учетом формулы 4:

где tЗ - возможное время задержки перехода ТВ-камеры в режим передачи видеоизображения, с.
Т.е., согласно формуле 5 ТВ-камера включается своевременно - до захода объекта в зону наблюдения.
Предварительно задаваемый интервал времени работы ТВ-камеры в режиме передачи видеоизображения берется с коэффициентом запаса 1,2 и рассчитывается по выражению:

где tР - интервал времени работы ТВ-камеры в режиме передачи видеоизображения, с;
АЕ - длина участка тропы, закрываемого ЗО, м;
VMIN - минимальная скорость движения нарушителя для данного участка тропы, м/с.
Разработанный способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
1. Установку средства 1 обнаружения и телевизионной камеры 5 на изгибе тропы согласно разработанной схеме (фиг. 6).
2. Развертывание системы 3 сбора и обработки информации (фиг. 8).
3. Задание интервала времени работы телевизионной камеры 5 в режиме передачи видеоизображения (формула 6).
Основной этап начинается при движении объекта через выбранный изгиб тропы и пересечении ЗО СО. Он включает:
1. Обнаружение средством 1 обнаружения объекта, пересекающего его ЗО, передачу средством 1 обнаружения команды управления на включение телевизионной камеры 5 в режим передачи видеоизображения.
2. Переход телевизионной камеры 5 в режим передачи видеоизображения на систему 3 сбора и обработки информации.
3. Прием видеоизображения системой 3 сбора и обработки информации и вывод его на монитор 4.
4. Анализ видеоизображения и распознавание объекта, движущегося по тропе, оператором 6.
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - основные характеристики телевизионных камер, входящих в состав разведывательно-сигнализационного комплекса;
- фиг. 2 - таблица зависимости размера изображения объекта от дальности до телевизионной камеры;
- фиг. 3 - схема развертывания одного средства обнаружения и телевизионной камеры в известном способе;
- фиг. 4 - схема развертывания двух средств обнаружения и телевизионной камеры в известном способе;
- фиг. 5 - таблица сравнения характеристик известных и предлагаемого способов;
- фиг. 6 - схема развертывания средства обнаружения и телевизионной камеры в предлагаемом способе;
- фиг. 7 - таблица зависимости скорости движения человека от условий местности;
- фиг. 8 - структурная схема взаимосвязи применяемых устройств, при реализации способа обнаружения и распознавания объекта.
Технический результат заключается в обеспечении условий успешного распознавания оператором объекта по его видеоизображению за счет установки ТВ-камеры напротив участка тропы, по которому движется объект, на расстоянии не более 10-15 м, своевременного (до захода объекта в зону наблюдения) включения ТВ-камеры с применением только одного средства обнаружения для управления ТВ-камерой и снижении трудозатрат на инженерную подготовку участка местности.
Источники информации
1. Маршалов, Т.А. Технические средства охраны границы: учебник/ Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
2. Радиосигнализатор телевизионный PC-ТВ. Руководство по эксплуатации ПМЕК. 424242. 9000 РЭ - М.: «Полюс-СТ», 2016. - 28 с.
3. Электронный ресурс - www.radiobarier.ru
4. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
5. Гедзберг, Ю.М. Охранное телевидение. - М.: Горячая линия - Телеком, 2005. - 312 с.
6. Гонта, А. Практическое пособие по CCTV / А. Гонта. - М.: Спецкнига, 2006. - 80 с.
7. Типовые нормы вырубки, нормы времени на рубку ухода за лесом в равнинных условиях. - М.: 1999. - 83 с.
8. Псарев, А. А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
9. Баленко, СВ. Школа выживания. - М.: 1994. - 140 с.



Изобретение относится к способам дистанционного охранного мониторинга маршрутов движения на местности и может быть использовано в случае совместного применения телевизионной камеры (ТВ-камеры) и пассивного оптико-электронного средства обнаружения (СО), управляющего режимами ее работы. Технический результат заключается в обеспечении условий успешного распознавания оператором объекта по его видеоизображению с применением только одного средства обнаружения для управления ТВ-камерой. Способ заключается в развертывании ТВ-камеры и СО на участке местности с изгибом тропы; развертывании СО с внешней стороны изгиба тропы так, чтобы ось его ЗО лежала на прямом участке тропы, и не менее 2/3 длины ЗО закрывало участок тропы; установке ТВ-камеры напротив прямого участка тропы на расстоянии, обеспечивающем размер изображения объекта относительно размера всего кадра не менее 50%; пересечении оптической осью ТВ-камеры середины участка тропы, закрытого ЗО СО; обнаружении СО объекта, движущегося через изгиб тропы, и передаче на ТВ-камеру команды управления на включение ее в режим передачи видеоизображения в течение предварительно заданного интервала времени на систему сбора и обработки информации (ССОИ); распознавании оператором объекта по видеоизображению на мониторе ССОИ. 8 ил.
Способ обнаружения и распознавания объекта, заключающийся в ориентировании телевизионной камеры на контролируемый участок тропы, работе телевизионной камеры в основное время в ждущем режиме; обнаружении средством обнаружения движущегося по тропе объекта при пересечении им зоны обнаружения и передаче на телевизионную камеру команды управления на ее включение в режим передачи видеоизображения; передаче видеоизображения телевизионной камерой в течение предварительно заданного интервала времени на систему сбора и обработки информации; распознавании оператором объекта по видеоизображению на мониторе системы сбора и обработки информации, отличающийся тем, что средство обнаружения разворачивается с внешней стороны изгиба тропы таким образом, чтобы ось его зоны обнаружения лежала на прямом участке тропы и не менее 2/3 длины зоны обнаружения закрывало участок тропы; телевизионная камера устанавливается напротив прямого участка тропы на расстоянии 10-15 м, обеспечивающем размер изображения объекта, движущегося по тропе, относительно размера всего кадра не менее 50%; оптическая ось телевизионной камеры проходит посередине участка тропы, закрытого зоной обнаружения средства обнаружения.
| МАЛОКАДРОВАЯ МОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2012 |
|
RU2504015C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ДВУХСТОРОННЕЙ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2605509C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДВУХ ЛЕЖАЩИХ РЯДОМ ДОРОГ | 2016 |
|
RU2621597C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ДОРОГОЙ | 2015 |
|
RU2605507C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

