Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения однопозиционного радиоволнового средства обнаружения (СО) для сигнализационного прикрытия двух лежащих рядом дорог.
Как правило, маршрут своего движения нарушитель строит с учетом существующей на местности сети дорог. Во многом успех задержания нарушителя зависит от знания силами реагирования направления его движения, поэтому сигнализационному прикрытию дорог уделяется значительное внимание [1, 2]. На местности часто встречается такой элемент дорожной сети, как участок с двумя лежащими рядом дорогами [3]. Движение нарушителя на этом элементе дорожной сети возможно в четырех направлениях: АС, СА, BD, DB (фиг. 1). Для охранного мониторинга дорог могут применяться однопозиционные радиоволновые средства обнаружения (СО). Как правило, такие СО имеют зону обнаружения (ЗО) протяженностью до 80 метров [4].
Известен способ охранного мониторинга двух лежащих рядом дорог, заключающийся в развертывании одного СО на участке местности, где расстояние между дорогами не превышает 80% от максимальной длины ЗО СО, таким образом, чтобы его ЗО пересекала обе дороги; выдачи сигнала тревоги СО в случае пересечения нарушителем его ЗО; анализе знака доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов СО в течение всего времени нахождения нарушителя в его ЗО; последующем применении алгоритма определения направления движения нарушителя по наличию положительной или отрицательной доплеровской добавки частоты отраженного от нарушителя сигнала с учетом схемы развертывания СО [2]. Так, если нарушитель движется в направлении СА или DB, доплеровская добавка частоты отраженного от нарушителя сигнала будет положительная, если в направлении СА или BD - доплеровская добавка частоты будет отрицательная (фиг. 2).
Известен другой способ охранного мониторинга двух лежащих рядом дорог, заключающийся в развертывании двух СО таким образом, чтобы каждое СО своей ЗО пересекало только одну дорогу; выдаче сигнала тревоги одним из СО в случае пересечения нарушителем его ЗО; анализе знака доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов СО в течение всего времени нахождения нарушителя в его ЗО; последующем применении алгоритма определения направления движения нарушителя по наличию положительной или отрицательной доплеровской добавки частоты отраженного от нарушителя сигнала с учетом схемы развертывания СО и номера СО, выдавшего сигнал тревоги (фиг. 3).
Недостатком первого указанного способа является низкая точность, он определяет только сторону, в которую движется нарушитель, без указания дороги (четыре возможных направления движения нарушителя определяются попарно) (фиг. 4).
Второй указанный способ имеет высокую точность указания направления движения обнаруженного нарушителя, он позволяет определить раздельно все четыре возможных направления движения нарушителя, однако для его реализации требуется два СО (фиг. 4).
В рассмотренных способах при развертывании СО его ориентируют к дороге таким образом, чтобы ось его ЗО пересекалась с дорогой под острым углом, так как это условие обеспечивает высокую радиальную скорость нарушителя, фиксируемую СО, а следовательно, и вероятность его обнаружения (фиг. 2, 3). Радиальная скорость нарушителя зависит от его фактической скорости движения по дороге и от угла пересечения оси ЗО СО с дорогой (фиг. 5).

где Vr - радиальная скорость нарушителя, м/с;
Vн - фактическая скорость нарушителя, м/с;
α - угол пересечения оси ЗО СО с дорогой, град.
Выполнение этого условия связано с тем, что применяемые СО, построенные на устаревшей элементной базе, имеют невысокий показатель отношения сигнал/шум, в значительной степени зависящий от радиальной скорости движения нарушителя [2].
В то же время современные СО позволяют обнаруживать нарушителей, двигающихся с незначительной радиальной скоростью (фиг. 6). Поэтому выполнение этого условия для современных СО не обязательно [4].
Целью изобретения является повышение точности указания направления движения обнаруженного нарушителя с применением только одного однопозиционного радиоволнового средства обнаружения.
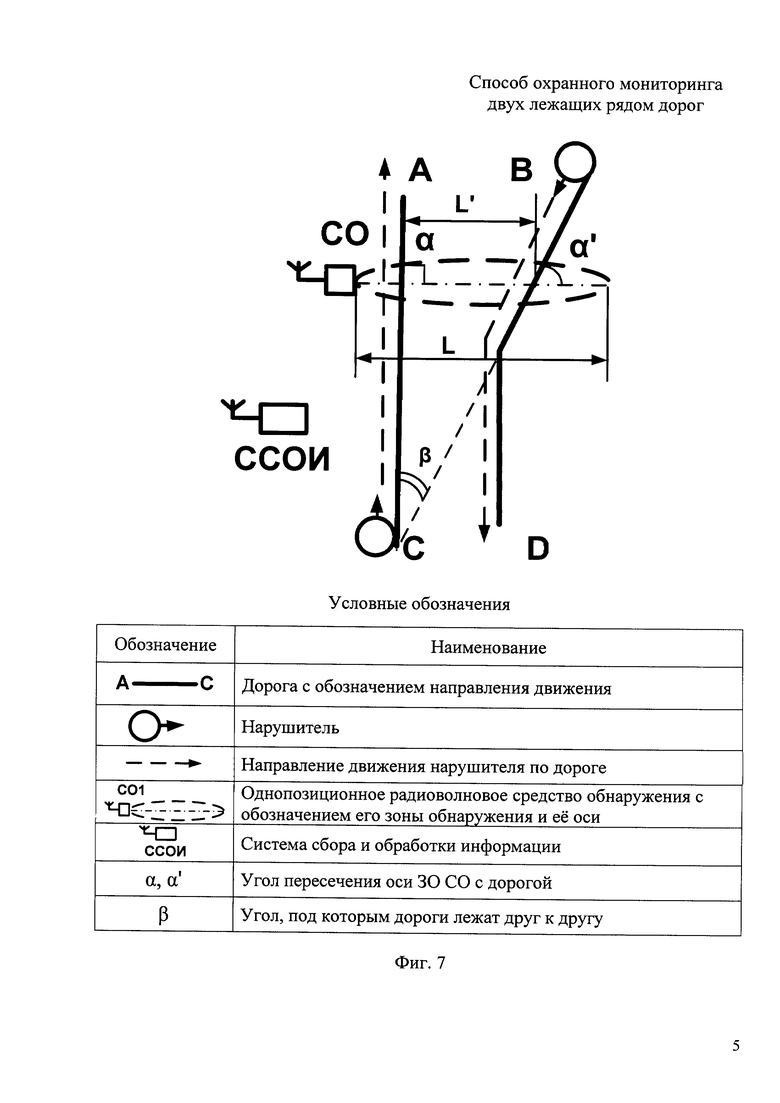
Для достижения поставленной цели разработан способ охранного мониторинга двух лежащих рядом дорог, заключающийся в развертывании СО на участке дорог, где они лежат к друг другу под углом 20 градусов и более и на расстоянии, не превышающем 80% от максимально возможной длины ЗО СО так, чтобы его ЗО пересекала обе дороги; в ориентировании оси ЗО к одной дороге под прямым углом, к другой дороге - под углом, отличным от прямого; выдаче сигнала тревоги СО в случае пересечения нарушителем его ЗО; анализе доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов СО в течение всего времени нахождения нарушителя в его ЗО; последующем применении алгоритма определения направления движения нарушителя по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала с учетом схемы развертывания средства обнаружения, только по дороге, к которой ось зоны обнаружения ориентируется под углом, отличным от прямого; определении направлений движения по дороге, к которой ось зоны обнаружения ориентирована под прямым углом, попарно, по наличию знакопеременной доплеровской добавки частоты отраженного сигнала (фиг. 7).
Известно, что частота отраженного сигнала от движущейся цели (нарушителя) отличается от частоты зондирующего сигнала и зависит от направления радиальной скорости нарушителя относительно СО [5].
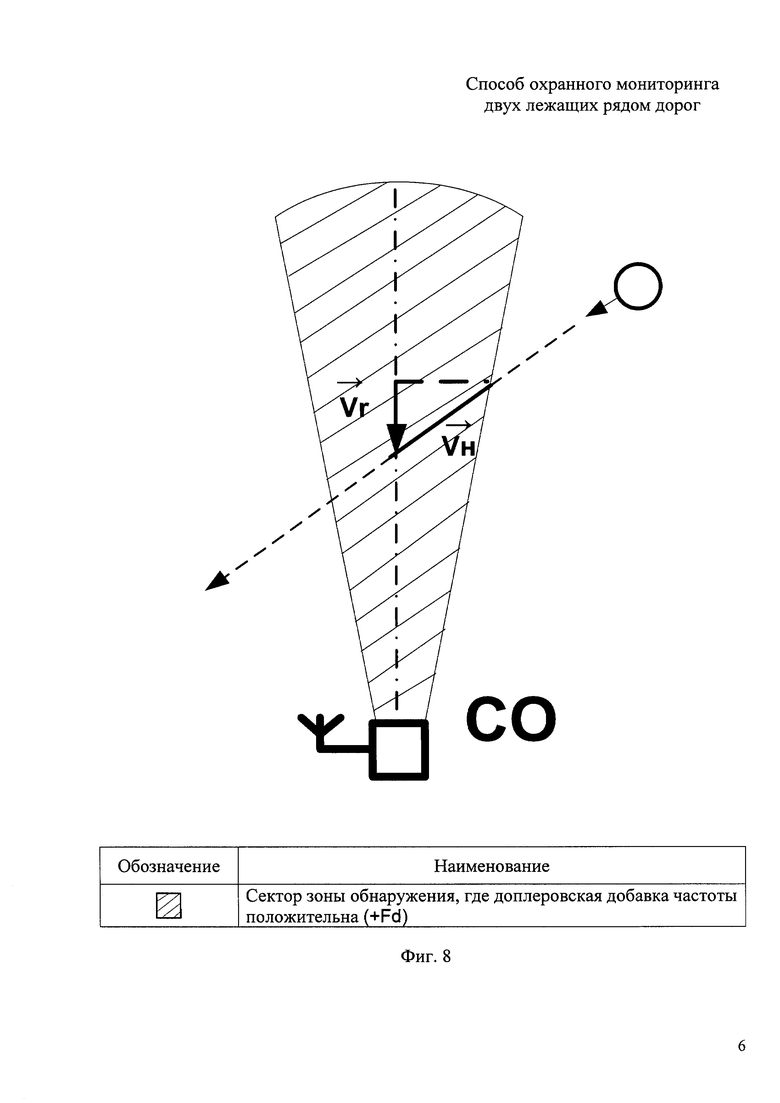
При приближении нарушителя к СО вектор радиальной скорости нарушителя направлен к СО и поэтому доплеровская добавка частоты в отраженном сигнале - положительна (фиг. 8):

где fc - частота отраженного сигнала от цели, Гц;
fo - частота зондирующего сигнала, Гц;
Fd - доплеровская добавка частоты, Гц.
Этому случаю соответствует движение нарушителя в направлении BD (фиг. 7).
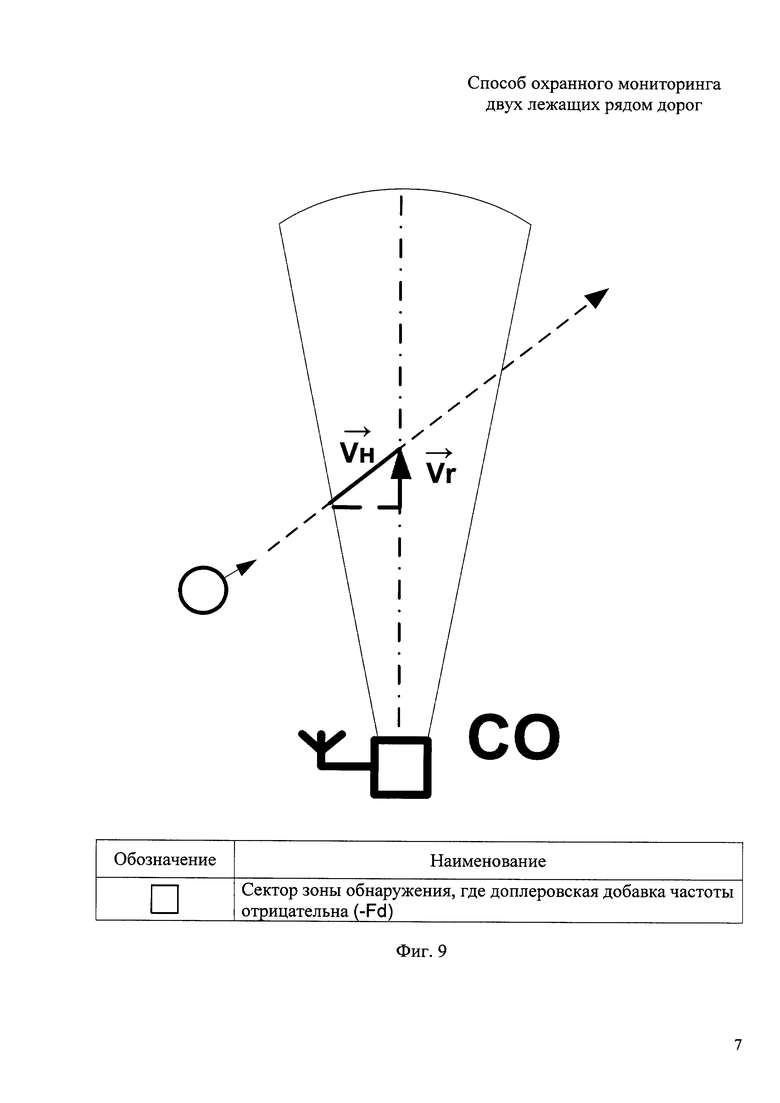
При удалении нарушителя от СО вектор радиальной скорости нарушителя направлен от СО и поэтому доплеровская добавка частоты в отраженном сигнале - отрицательная (фиг. 9):

Этому случаю соответствует движение нарушителя в направлении DB (фиг. 7).
Очевидно, что имея такой набор признаков (положительная и отрицательная доплеровская добавки частоты отраженного сигнала), можно определить только два направления движения нарушителя.
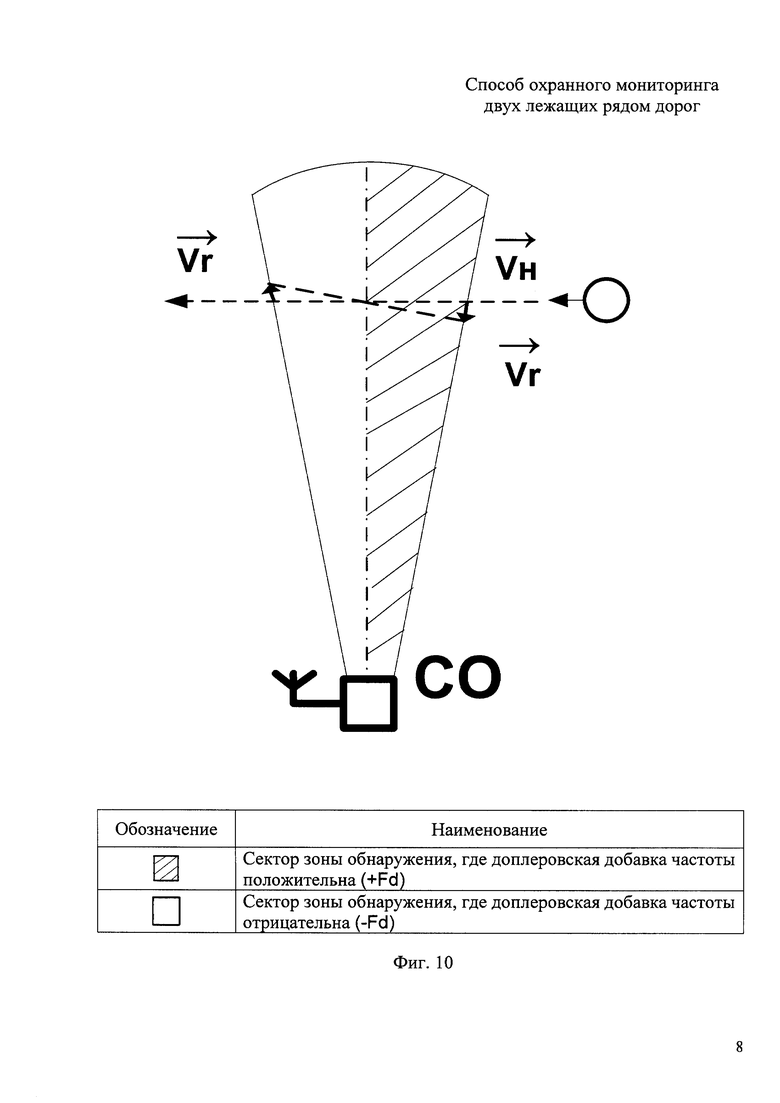
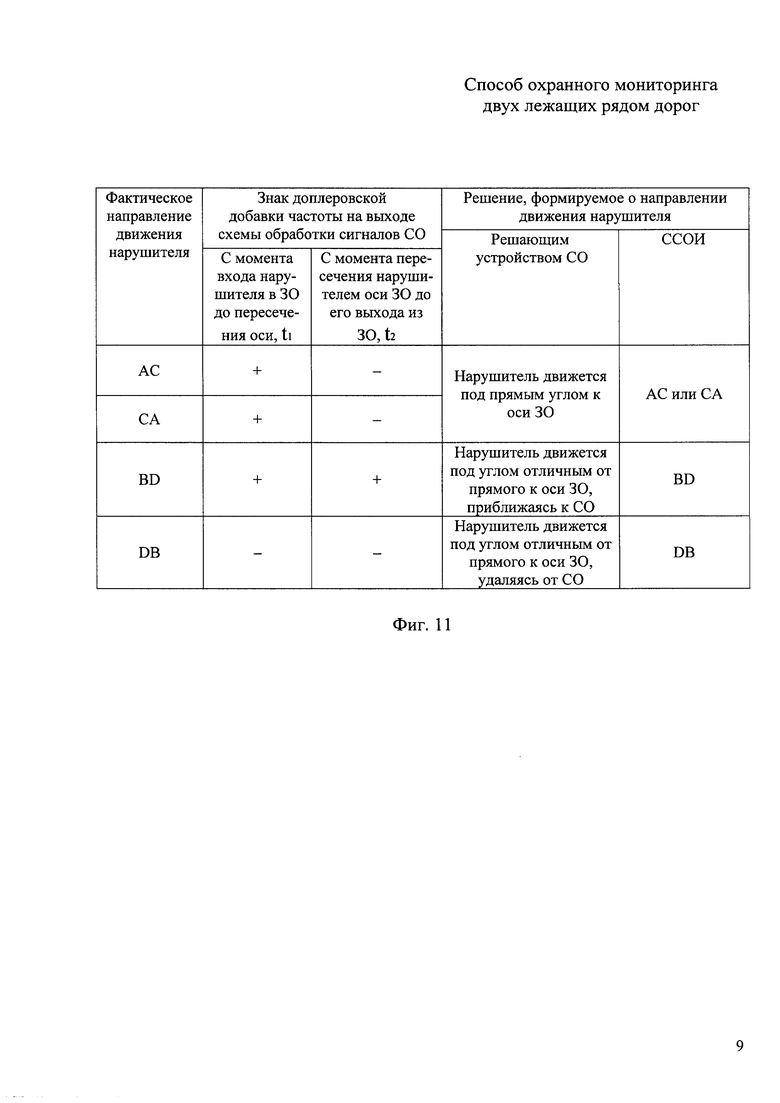
В то же время, если сориентировать СО таким образом, чтобы ось его ЗО пересекала одну из двух дорог под прямым углом, то при движении нарушителя через ЗО доплеровская добавка частоты отраженного сигнала будет знакопеременной. Сначала она будет положительной, так как вектор радиальной скорости нарушителя направлен к СО, затем после пересечения им оси ЗО доплеровская добавка частоты отраженного сигнала будет отрицательной, так как вектор радиальной скорости нарушителя направлен от СО (фиг. 10, 11).
Цель в предлагаемом способе достигается за счет выделения и анализа расширенного признакового пространства, указывающего на направление движения нарушителя. Признаковое пространство включает в себя помимо ранее используемых (в известных способах определения направления движения нарушителя) положительной и отрицательной доплеровской добавки частоты отраженного от нарушителя сигнала еще и знакопеременную. Так, в предлагаемом способе движение нарушителя в направлении АС и СА определяется попарно по наличию знакопеременной доплеровской добавки частоты (фиг. 11):

где t1 - время с момента входа нарушителя в ЗО до пересечения оси, с;
t2 - время с момента пересечения нарушителем оси ЗО до его выхода из ЗО, с;
Как в известном способе с применением одного СО в предлагаемом способе выбирается участок местности, на котором расстояние между дорогами не превышает 80% от максимально возможной длины ЗО СО.
Это делается по двум причинам: СО развертывается на некотором удалении от дороги в целях соблюдения маскировки; вторую дорогу ЗО СО должна пересекать с некоторым запасом по длине, так как границы ЗО могут быть определены неточно (фиг. 7):

где L' - расстояние по оси ЗО СО между дорогами, м;
L - длина зоны обнаружения СО, м.
С учетом фактической длины ЗО современных СО расстояние между дорогами при применении способа не должно превышает 60 метров (фиг. 6).
Выделение указанного расширенного пространства признаков возможно на участке дорог, где они лежат под углом друг к другу. При применении способа на практике выбирается тот участок дорог, на котором они лежат друг к другу под углом β, равным 20 градусов и более (фиг. 7).
При этих значениях угла β угол пересечения оси ЗО СО с дорогой α' имеет значение 80 градусов и менее:

где β - угол, под которым дороги лежат друг к другу, град;
α' - угол пересечения оси ЗО СО с дорогой, град.
Выполнение этого условия исключает знакопеременную доплеровскую составляющую в отраженном от нарушителя сигнале, при его движении в направлении BD и DB.
Принятие решения о направлении движения нарушителя автоматизировано: в СО анализируется знак доплеровской добавки частоты, принимается решение о движении нарушителя относительно самого средства, эта информация передает на систему сбора и обработки информации (ССОИ). В ССОИ полученная информация анализируется в контексте известной схемы развертывания СО на местности, на основе чего принимается окончательное решение о направлении движения обнаруженного нарушителя (фиг. 11).
В условиях рассматриваемой территориальной конкретики (две дороги) трех признаков недостаточно, чтобы раздельно определить все четыре возможных направления движения нарушителя.
Два из них могут быть определены раздельно по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала (BD и DB), два могут быть определены парно по знакопеременной доплеровской добавке частоты отраженного сигнала (АС и СА). В то же время в сравнении с известным способом, в котором также применяется только одно СО, точность определения направления движения нарушителя в предлагаемом способе выше. Так, как в известном способе все четыре направления движения определяются попарно (фиг. 4).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
1. Выбор участка местности, на котором располагаются дороги относительно друг друга под углом (β) от 20 градусов и более и расстоянии (L'), не превышающем 80% от максимально возможной длины ЗО СО (фиг. 7).
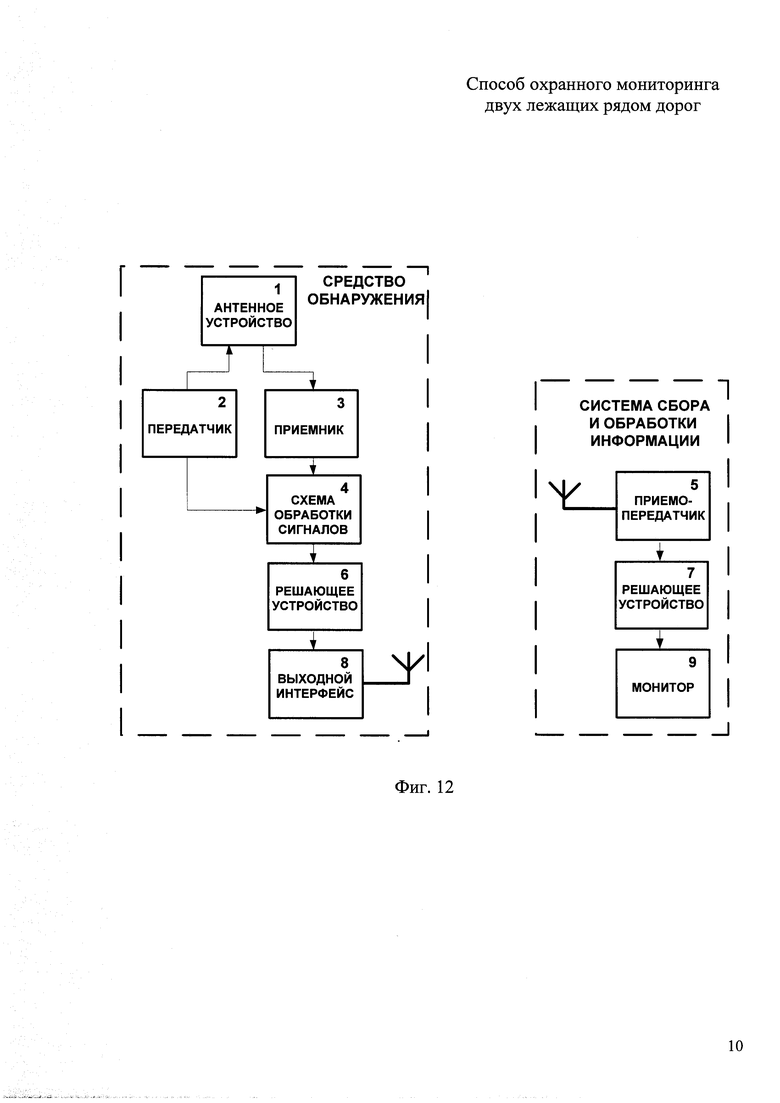
2. Развертывание СО с антенным устройством 1, передатчиком 2, приемником 3, схемой 4 обработки сигналов, решающим устройством 6 и выходным интерфейсом 8 по разработанной схеме (фиг. 7).
3. Развертывание на местности системы сбора и обработки информации (ССОИ), включающей в себя приемопередатчик сигналов 6, решающее устройство 7 и монитор 9 (фиг. 12).
4. Запись алгоритма определения направления движения нарушителя в решающее устройство 7 ССОИ (фиг. 11).
5. Начало работы СО и ССОИ.
Основной этап начинается попаданием нарушителя в зону обнаружения СО, он включает:
1. Излучение зондирующего сигнала передатчиком 2 через антенное устройство 1 и прием отраженного от нарушителя сигнала приемником 3 (фиг. 12).
2. Регистрацию СО факта начала появления нарушителя в его зоне обнаружения схемой 4 обработки сигналов (фиг. 12).
3. Началом анализа знака доплеровской добавки частоты отраженного от нарушителя сигнала решающим устройством 6 (фиг. 12).
4. Регистрацию СО факта выхода нарушителя из ЗО схемой 4 обработки сигналов, окончание анализа решающим устройством 6 (фиг. 11).
5. Принятие решения решающим устройством 6 о направлении движения нарушителя относительно СО (фиг. 11).
6. Передача через выходной интерфейс 8 сигнала о наличии нарушителя и направлении его движения относительно СО на приемопередатчик 5 ССОИ (фиг. 12).
7. Получение сигнала от СО приемопередатчиком 5 (фиг. 12).
8. Анализ решающим устройством 7 полученного сигнала с учетом известного ориентирования СО относительно дорог и формирование решения о направлении движения нарушителя (фиг. 11).
9. Выведение результата на монитор 9 (фиг. 12).
Сущность изобретения поясняется графическими материалами, где представлены:
- фиг. 1 - схема возможных направлений движения нарушителя по двум лежащим рядом дорогам;
- фиг. 2 - схема развертывания одного средства обнаружения в известном способе;
- фиг. 3 - схема развертывания двух средств обнаружений в известном способе;
- фиг. 4 - таблица сравнения характеристик известных и предлагаемого способов охранного мониторинга двух лежащих рядом дорог;
- фиг. 5 - таблица соответствия радиальной скорости нарушителя (Vr) в зависимости от фактической скорости нарушителя (Vн) и угла пересечения оси ЗО СО с дорогой (α);
- фиг. 6 - таблица основных характеристик современных однопозиционных радиоволновых средств обнаружений, выпускаемых российской промышленностью;
- фиг. 7 - схема развертывания однопозиционного радиоволнового средства обнаружения в предлагаемом способе;
- фиг. 8 - схема, показывающая направление вектора радиальной скорости нарушителя при движении его в направлении к СО;
- фиг. 9 - схема, показывающая направление вектора радиальной скорости нарушителя при движении его в направлении от СО;
- фиг. 10 - схема, показывающая изменение направления вектора радиальной скорости нарушителя при пересечении оси ЗО СО под прямым углом;
- фиг. 11 - алгоритм (таблица) определения направления движения нарушителя;
- фиг. 12 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат состоит в повышении точности указания направления движения обнаруженного нарушителя (из четырех возможных направлений движения два определяются раздельно, два - попарно) с применением только одного однопозиционного радиоволнового средства обнаружения (фиг. 4).
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
3. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
4. Р78.36.026-2012. Рекомендации по использованию технических средств обнаружения, основанных на различных физических принципах, для охраны огражденных территорий и открытых площадок (код: К.5.И.02.2012, шифр: «Территория»), 2012. - 358 с.
5. Финкельштейн М.И. Основы радиолокации: Учебник. - М.: Советское радио, 1973. - 495 с.
Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения однопозиционного радиоволнового средства обнаружения (СО) для сигнализационного прикрытия двух лежащих рядом дорог. Способ заключается в развертывании СО на участке дорог, где они лежат к друг другу под углом 20 градусов и более и на расстоянии, не превышающем 80% от максимально возможной длины ЗО СО, так, чтобы его ЗО пересекала обе дороги; в ориентировании оси ЗО к одной дороге под прямым углом, к другой дороге - под углом, отличным от прямого; выдаче сигнала тревоги СО в случае пересечения нарушителем его ЗО; анализе доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов СО в течение всего времени нахождения нарушителя в его ЗО; последующем применении алгоритма определения направления движения нарушителя по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала с учетом схемы развертывания средства обнаружения только по дороге, к которой ось зоны обнаружения ориентируется под углом, отличным от прямого; определении направлений движения по дороге, к которой ось зоны обнаружения ориентирована под прямым углом, попарно, по наличию знакопеременной доплеровской добавки частоты отраженного сигнала. Способ включает подготовительный этап с развертыванием по разработанной схеме СО и основной этап, который начинается с момента попадания нарушителя в ЗО СО, в течение которого он обнаруживается и определяется направление его движения. Технический результат состоит в повышении точности указания направления движения обнаруженного нарушителя (из четырех возможных направлений движения два определяются раздельно, два - попарно) с применением только одного однопозиционного радиоволнового средства обнаружения. 12 ил.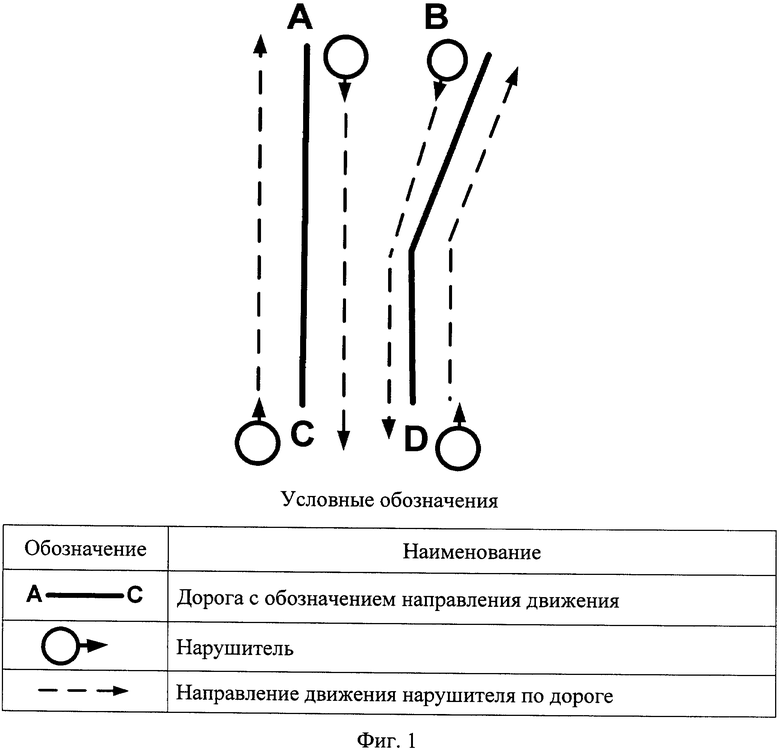
Способ охранного мониторинга двух лежащих рядом дорог, заключающийся в развертывании однопозиционного радиоволнового средства обнаружения на участке местности, где расстояние между дорогами не превышает 80% от максимально возможной длины зоны обнаружения однопозиционного радиоволнового средства обнаружения, так, чтобы его зона обнаружения пересекала обе дороги; выдаче сигнала тревоги средством обнаружения в случае пересечения нарушителем его зоны обнаружения; анализе знака доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов средства обнаружения в течение всего времени нахождения нарушителя в его зоне обнаружения; последующем применении алгоритма определения направления движения нарушителя по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала с учетом схемы развертывания средства обнаружения, отличающийся тем, что средство обнаружения развертывается на участке дорог, где они лежат к друг другу под углом 20 градусов и более; в ориентировании оси зоны обнаружения к одной из дорог под прямым углом, ко второй дороге - под углом, отличным от прямого; определении направления движения по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала с учетом схемы развертывания средства обнаружения только по дороге, к которой ось зоны обнаружения ориентируется под углом, отличным от прямого; определении направлений движения по дороге, к которой ось зоны обнаружения ориентирована под прямым углом, попарно, по наличию знакопеременной доплеровской добавки частоты отраженного сигнала.
| RU 2011124585 A, 10.01.2013 | |||
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
| EP 1998304 A1,03.12.2008 | |||
| RU 2013146646 A, 27.04.2015. | |||

