(54) ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1977 |
|
SU663577A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| Устройство для автоматической сборки нецоколеванных миниатюрных ламп накаливания | 1958 |
|
SU121512A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Вакуумный манипулятор | 1985 |
|
SU1315293A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ИЗДЕЛИЙ | 1978 |
|
SU713367A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ДЕТАЛИ | 1991 |
|
RU2016370C1 |
Изобретение относится к области машиностроения, а именно к манипуляторам для механизации и автоматизации производственных процессов.
Известен захват манипулятора, предназначенный для механизации и автоматизации производственных процессов, в котором содержится привод линейного перемещения, например, силовой цилиндр, на штоке которого закреплен клин 1.
Недостатком этого захвата является низкое быстродействие при захвате длинномерных деталей вследствие необходимости осевого перемещения захвата от дополнительного привода.
Наиболее близким к изобретению по технической сущности является за хват, в котором содержатся зажимные губки, связанные параллелограммными механизмами с корпусом и с приводом линейного перемещения, например, силовым цилиндром, на штоке которого закреплен клин, а на передаточных механизмах губок расположены связанные с ним ролики (2.
Недостаток изв.естного захвата заключается,в том, что он сложен изза необходимости осевого перемешения от дополнительного привода при захватывании длин неядерных деталей.
Целью изобретения является smpoщение конструкции и повышение быстродействия.
Цель достигается тем, что передаточный механизм каждой губки снабжен передачей и подпружиненной по корпусу кулисой с пазом, ось ролика
0 смонтирована на конце передаточного механизма, расположена в пазу кулисы и подпружинена в сторону кЛина, при этом одна из них жестко связана с кулисой, а другая - со штоком при5вода.
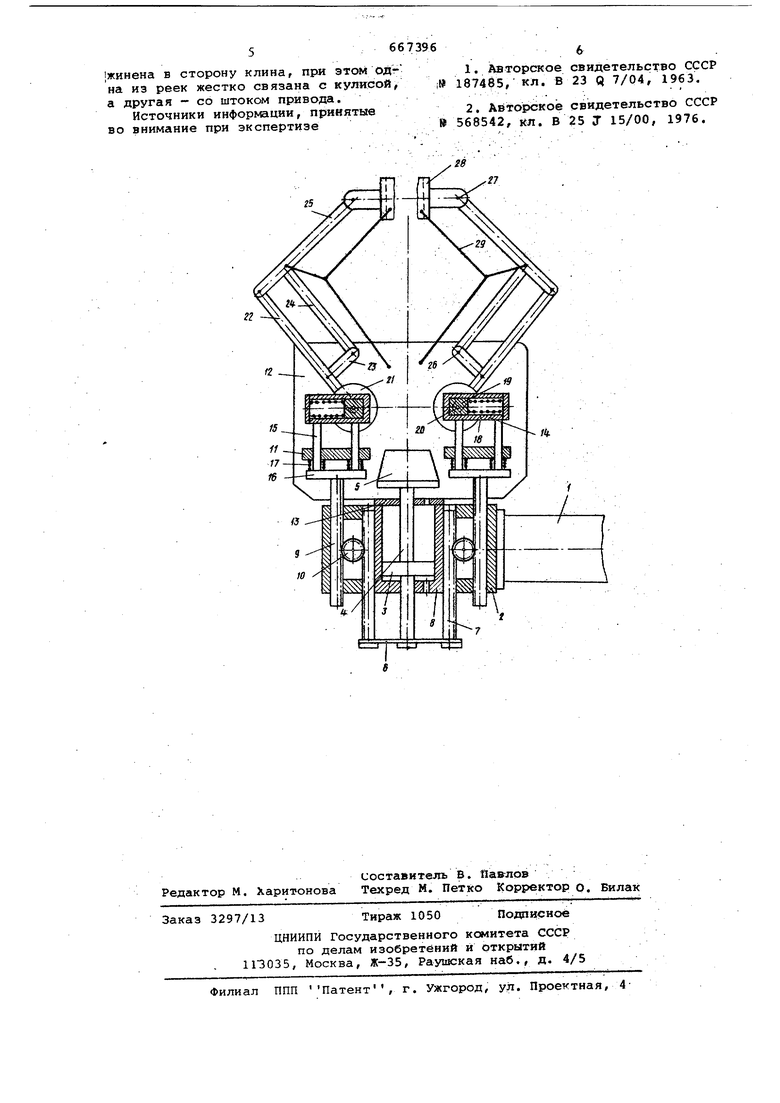
На чертеже схематично изображен предлагаемый захват.
На руке 1 манипулятора установлен
0 корпус 2 захвата с силовым цилиндром например гидроцилиндром 3. На одном конце щтрка 4 гидроцилиндра 3 установлен .клин 5, на другом конце штока 4 укреплена планка 6, к которой закреп5лены концы зубчатых реек 7. Рейки 7 установлены подвижно в корпусе 8 гйдроцилиндра, параллельно штоку 4. Параиплельно рейкам 7 в том же корпусе установлены рейки 9. Каждая пара реёк 7 и 9 зацепляется с установленной на корпусе шестерней 10.
На полках 11, соеаинявмзшх две шеки 12 кронштейна 13, который закреплён неподвижно относительно корпуса 8, установлены кулнсы 14. Кулисы 14 штангами 15, установленнЕами подвижно относительно полки 11 и параллельно штоку 4, связаны с планками 16. Планки 16 отжимаются пружинами 17, что способствует прижатию кулис к полкам 11.
В кулисы 14 вставлены поджатые пружинами 18 в направлении оси руки 1 сухари 19, на осях 20 котбрых могут свободно вращаться ролики 21. Ролики 21 установлены на концах рычагов 22 параллелограммных передаточных механизмов, в состав которых входят рычаги 23-25, шарнирно связанные между собой. Рычаги 23 и 24 связаны с щеками 12 через шарниры 26. шарнира 26, ролика 21 и шарнира 27 соединения рычага 25с губкой 28 расположены на одной прямой. Системы параллельных рычагов 29 между губками 28 и кронштейном 13 удерживают губки в заданнсяй положении. Жесткость пружин 17 и 18, и угол клина 5 подобраны таким образ да1, что продольное перемещение кулисы 14 при .давлении Клина 5 на ролик 21 возможно только после запирания сухарей 19 в кулисе 14.
Предлагаемый захват работает следугашим образом.
В исходном положении шток 4 сдвинут до упора назад, при этом рейки 7 сдвинуты также назад, а рейки 9 сдвинуты вперед, их торцы упираются в планки 16. Планки 16 под действием реек вместе с кулисами 14 и роликами 21 сдвинуТы вперед. Сухари 19 под действием пружин 18 сдвинуты к центру. Так как оси 20 роликов 21 сдвинуты вперед и к центру, то оси 20 губок 28 сдвинуты назад и от центра .
Таким образом, в исходном положении губки 28 захвата втянуты и раскрыты.
При движении штока 4 гидроцилиндра вперед в том же направлении движутся рейки 7, вследствие чего рейки 9 Движутся в 1:ротивоположном. При движении реек 9 назад под действием пружин 17 также движутся кулисы 14 вместе с роликами 21. Из-за движения назад по прямой линии-вместе.с кулисой 14 оси 20 ролика 21, установленной на рычаге 22, также по прямолинейной траектории, но вперед, движется точка рычага 25, лежащая на одной прямой с осью 20 и центром шарнира 26(вперед движутся Шарниры 27 вместе с раскрытыми губками 28).
Движение губок 28 вперед происходит пока ролики 21, которые смещаются назад, не упрутся в движущийся вперед вместе со штокрм 4 клин 5. Движение губок 28 вперед прекращается, и при дальнейшем движении штока 4 вперед ролики 21 под действием клина 5 смещают оси 20 в пазах кулис 14 в поперечном направлении от центра. При этом шарниры 27 вместе с губками 28 смещаются в поперечном направлении к центру. Такое движение губок прекращается при зажатии ими детали и невозможности дальнейшего движения роликов 21 в поперечном направлении от центра.
При дальнейшем движении штока 4 вперед вместе с клином 5, не имея возможности двигаться в попере 1нс 4 направлении,вперед смещаются роли|ки 21, уалекая са собой кулисы 14. При движении осей 20 вперед, назад смещаются шарниры 27 вместе с губками 28 и зажатой в них деталью.
Таким образом, при движении штока 4 из крайнего задне го положения .в крайнее переднее положение раскрытые губки 28 захвата перемещаются по прямолинейной траектории вперед к захватываемой детали, поперечным движением по -направлению к центру зажимают деталь и вместе с деталью по прямолинейной траектории возвращаютс назад. При включении только одного привода захвата губки захвата входят в рабочую зону, зажимают деталь и выдвигают ее из рабочей зоны.
При движении штока 4 из крайнего переднего положения назад клин 5 смещается назад, и под действием пружин 17 смещаются назад до упора кулисы 14 с рпиками 21. При этом впере смещаются губки 28 с зажатой деталью При наезде кулис 14 на полки 11,они Останавливаются и при дальнейшем движении клина 5 со штоком 4 назад под действием пружин 18 к центру смещаются оси 20 роликов 21.При этом в поперечном направлении от центра смещаются губки 28,отпуская деталь.При дальнейшем движении штока 4 назад движущиеся при этом вперед рейки 9 упираются в планки 16,смещая вперед кулисы 14 вместе с осями 20.При этомразведенные губки смещаются назад.
Формула изобретения Захват манипулятора, содержащий зажимные губки, связанные.передаточными механизмг1ми с корпусом, и с приводом линейного перилещения, например, силовым цилиндром, на штоке которого закреплен клин, а на передаточных механизмах губок расположены ролики, отличающийся тем, что, с целью упрсздения конструкции и повышения быстродействия, передаточный механизм каждой губки снабжен зубчато-реечной передачей и подпружиненной относительно корпуса кулисой с пазом, ось ролика смонтирована на конце передаточного механизма расположена в. пазу кулисы и подпру жинена в сторону клина, при этом одг на из реек жестко связана с кулисой, а другая - со штоком привода.
Источники информации, принятые во внимание при экспертизе
га
f7
