Изобретение относится к машиностроению, в частности, к конструкциям рабочих органов промышленных роботов и манипуляторов, работающих в герметизированном объеме, и может быть использовано во всех отраслях народного хозяйства, в том числе в технологическом процессе изготовления электронных приборов для обработки радиоактивных, токсичных и взрывчатых веществ, осуществляемой в высоком вакууме, а также для проведения ряда дистанционных работ, проводимых в открытом космосе и в медицине.
Известные конструкции захватов (см, А.Т. Александрова «Новые способы передачи и формирования движения в вакууме», М. Высшая школа, 1979 г., с. 25-45), принцип действия которых основан на использовании для перемещения ведомого элемента сил статического трения или упругого деформирования одного или нескольких последовательно соединенных и определенным образом ориентированных друг относительно друга элементов, представляющих собой гибкие трубки «Бурдона». В конструкциях этих захватов полностью исключены люфты, зазоры и кинематические пары трения движения. Они не требуют смазки и хорошо работают в условиях сухого трения в высоком вакууме, при этом сохраняют стерильность вакуумированного объема и стабильность параметров качественных характеристик рабочей среды, определяющей себестоимость, объемы и качество выпускаемой продукции.
Недостатком известных захватов является то, что они требуют применения для их обслуживания сложного оборудования: гидравлических и пневматических систем, контрольно-измерительной аппаратуры, что сказывается на массогабаритных показателях всего манипулятора в целом и на себестоимости выпускаемой продукции. Кроме того, они громоздки и обладают небольшой зоной обслуживания захватом.
Наиболее близким по технической сущности к предполагаемому изобретению (прототипом) является захват манипулятора (а.с. СССР №963849, М. кл. 4 В25j 15/00), содержащий корпус и шарнирно установленные на нем губки. Губки связаны с корпусом посредством разнообразных кинематических пар и соединений, имеющих зазоры, люфты и кинематические пары трения движения.
Недостатком такого захвата является низкая надежность конструкции захвата и невысокая стабильность качественных характеристик рабочей среды, в которой он работает, что приводит к низкому качеству выпускаемой продукции.
Технология изготовления электронных приборов во многих случаях основана на сложных комплексных процессах, выполняемых в высоком вакууме в едином технологическом цикле на автоматических и поточных линиях, а также многопозиционных установках камерного типа. Конструкцией вакуумного автоматического оборудования предусмотрена межоперационная транспортировка изделий и полуфабрикатов в герметичных условиях. Осуществление автоматического цикла работы такого оборудования [ох ни чес к и сложная задача. В тех случаях, когда технологический процесс обработки изделий построен не только на выполнении определенного комплекса физико-химических процессов, но и требует некоторых механических или силовых воздействий на обрабатываемые изделия, а также их относительного перемещения внутри герметизированных технологических объемов, оборудование должно быть оснащено исполнительными механизмами и их рабочими органами, работающими в герметизированном объеме. Однако, при работе введенных в вакуум исполнительных механизмов вместе с их рабочими органами из-за создания дополнительного газового потока и выделения продуктов износа самими же исполнительными механизмами, может быть нарушен состав остаточных газов технологической вакуумной среды в рабочем объеме оборудования, что неблагоприятно воздействует на протекание основного процесса обработки. Нарушается стерильность вакуумной камеры, а вместе с тем и качество параметров стабилизации характеристик рабочей среды технологического процесса.
Кроме того, преобразование движения в рабочем объеме связано с введением в схемы исполнительных механизмов вместе с рабочими органами и их кинематических пар и соединений, работающих в условиях сухого трения. Работа таких кинематических пар в вакууме характеризуется низкой надежностью, снижением точности, потерей числа кинематических подвижностей, появлением добавочных напряжений и деформаций, которые являются следствием сложных процессов разрушения, возникающих в зонах контакта поверхностей трения. Известно также, что высокий вакуум оказывает влияние на материалы. Так, металлы, помещенные в вакуум, испаряются; в вакууме повышается адгезия (сцепление), увеличиваются коэффициенты трения контактирующих поверхностей, ухудшаются условия теплопередачи, изменяются механические (пластичность, усталостная прочность и др.), а также электрические свойства материалов. Такие механизмы захватов манипуляторов, работающих в вакууме, ухудшают качественные характеристики рабочей среды, определяющей объемы, себестоимость и качество выпускаемой продукции. Они не стерильны и выделяют продукты износа из трущихся поверхностей, которые нуждаются в смазке, что в вышеперечисленных технологических процессах категорически запрещено. Например, создается дополнительный газовый поток, в котором могут оказаться продукты износа, выделяемые в виде микрочастиц, присутствие которых в составе остаточных газов вакуумированного объема нежелательно, а иногда недопустимо. Поэтому механизмы рабочих органов манипуляторов, предназначенных для работы в вакууме, должны быть выполнены по схемам, отличающимся от принятых в общем машиностроении.
Цель предполагаемого изобретения - повышение качества выпускаемой продукции за счет повышения надежности конструкции захвата и стабильности качественных характеристик рабочей среды.
Поставленная цель достигается тем, что в захвате манипулятора, содержащем корпус с шарнирно установленными на нем губками, упругие элементы шарниров выполнены в виде пружин, установленных перпендикулярно друг другу, концы которых жестко закреплены последовательно в местах шарнирного соединения губок с корпусом.
Выполнение упругих элементов шарниров в виде пружин, установленных перпендикулярно друг другу и закрепленных жестко в местах шарнирного соединения губок с корпусом, позволит повысить надежность конструкции захвата, так как подобный шарнир не имеет люфтов, зазоров и кинематических пар трения движения, как в прототипе, и позволяет удерживать и перемещать предметы за счет сил статического трения и упругого деформирования (нет сухого трения). Предлагаемый захват, работающий в герметичном вакуумном объеме, не ухудшает качественных характеристик рабочей среды, поскольку нет трущихся поверхностей, нуждающихся в смазке, нет и продуктов износа, образующихся при сухом трении и загрязняющих рабочую среду - вакуум, то есть позволяет стабилизировать качественные характеристики рабочей среды, улучшая качество выпускаемой продукции.
Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями в данной области техники не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию «существенные отличия».
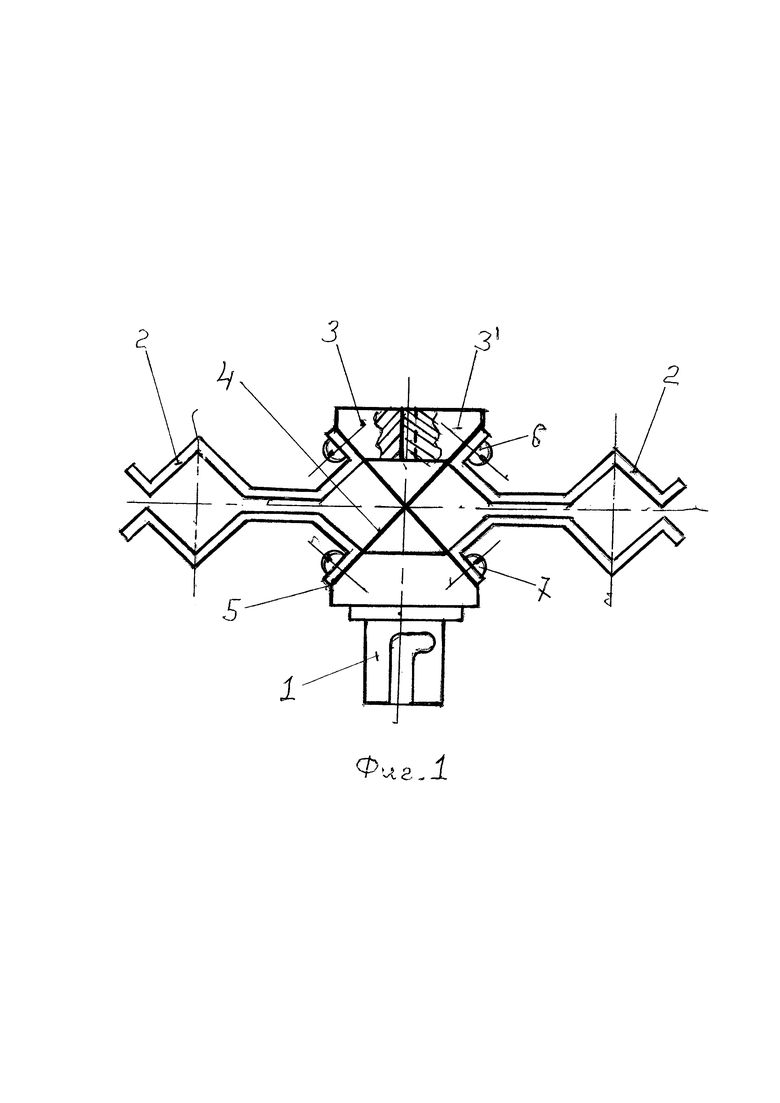
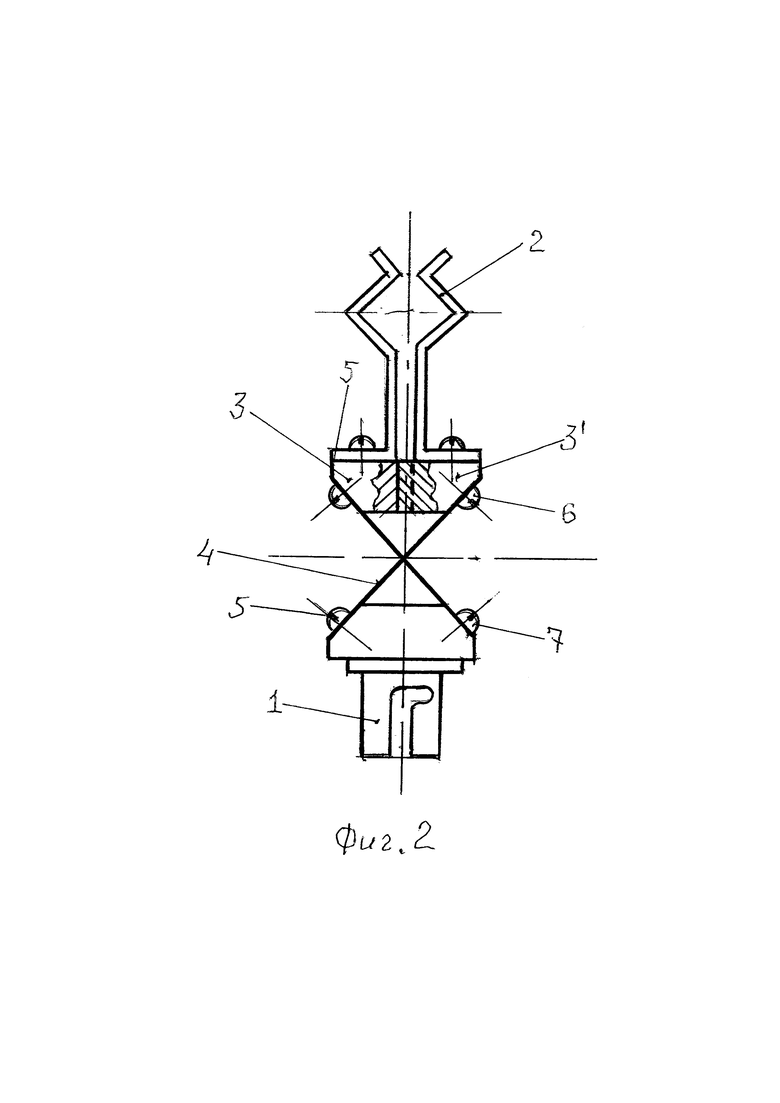
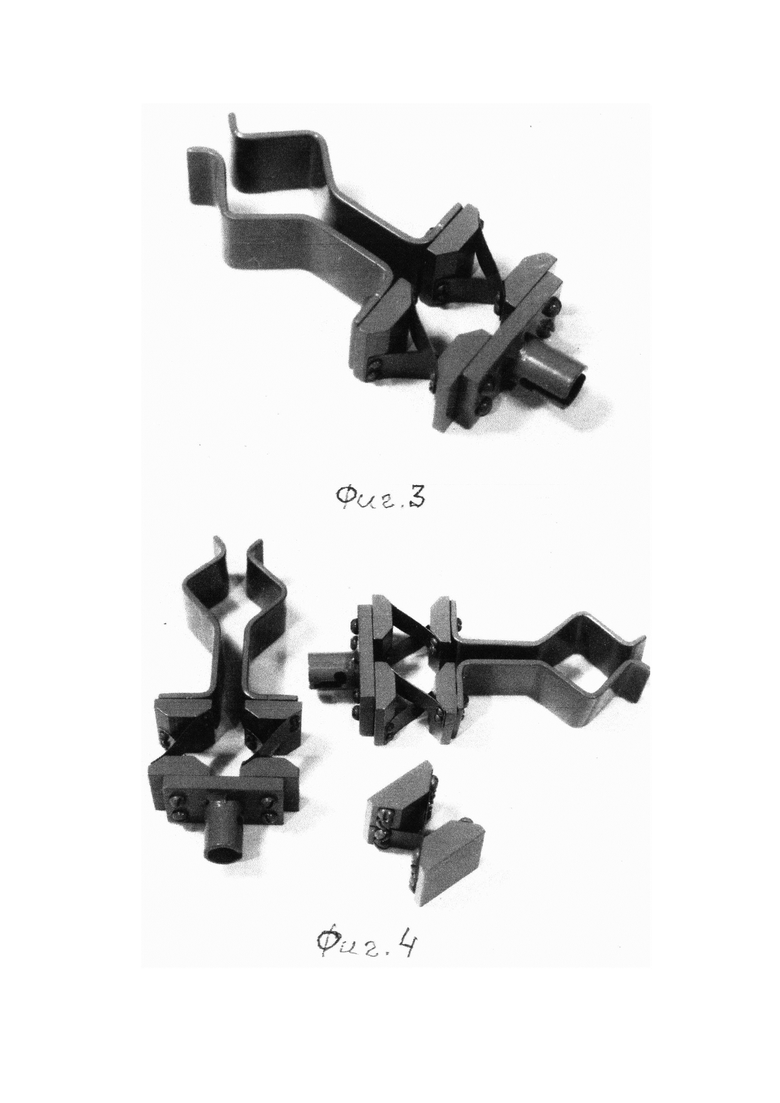
На фиг. 1 изображен общий вид захвата манипулятора. На фиг. 2 изображен вариант выполнения захвата. На фиг. 3 и 4 (фотографии) изображено натуральное исполнение опытных образцов захватов и общий вид образцов безлюфтовых шарниров соответственно.
Захват манипулятора содержит корпус 1 с шарнирно установленными на нем губками 2, безлюфтовые шарниры 3, упругие элементы 4 которых выполнены в виде пружин (плоских или круглых), установленных перпендикулярно друг другу, концы 5 которых жестко закреплены последовательно в местах 6 и 7 шарнирного соединения губок 2 захвата с его корпусом 1.
Захват манипулятора работает следующим образом.
При совершении схвата предмета осуществляется прямолинейное перемещение захвата манипулятора вдоль горизонтальной оси. При этом его шарнирно установленные губки 2, связанные с корпусом 1 посредством безлюфтовых шарниров 3, производят захват предмета и его удержание за счет сил статического трения и упругого деформирования пружин гибких элементов 4 упругих безлюфтовых шарниров 3. Жесткое закрепление концов 5 упругих элементов 4 (пружин) в местах 6 и 7 шарнирного соединения губок 2 с корпусом 1 захвата позволяет ему концентрировать силы статического взаимного расположения.
В качестве упругих элементов 4 используются пружины, выполненные из нитинола, что позволяет работать захвату от температурных, искусственных перепадов памяти, поскольку нитинол обладает температурной памятью.
Технико-экономическое обоснование
Технические преимущества заявляемого объекта по сравнению с прототипом заключаются в повышении надежности конструкции захвата и стабильности качественных характеристик рабочей среды, в которой работает захват, что улучшает качество выпускаемой продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 2018 |
|
RU2697290C2 |
| Захват манипулятора | 2018 |
|
RU2686167C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| МАНИПУЛЯТОР | 2019 |
|
RU2716327C1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| ГИБКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2716293C1 |
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2691169C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2705824C1 |
| МАНИПУЛЯТОР | 2019 |
|
RU2722505C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
Изобретение относится к машиностроению, в частности к конструкциям рабочих органов промышленных роботов и манипуляторов, работающих в герметизированном объеме, и может быть использовано во всех отраслях народного хозяйства, в том числе в технологическом процессе изготовления электронных приборов для обработки радиоактивных, токсичных и взрывчатых веществ, осуществляемой в высоком вакууме, а также для проведения ряда дистанционных работ, проводимых в открытом космосе и в медицине. Захват манипулятора, работающего в герметизированном объеме, содержит корпус, связанный с шарнирно установленными на нем губками посредством шарниров. Шарниры содержат упругие элементы, выполненные в виде пружин, установленных перпендикулярно друг другу, концы которых жестко закреплены последовательно в местах шарнирного соединения губок с корпусом. При этом пружины изготовлены из нитинола. В результате обеспечивается повышение качества выпускаемой продукции за счет повышения надежности конструкции захвата и обеспечения стабильности качественных характеристик рабочей среды. 4 ил.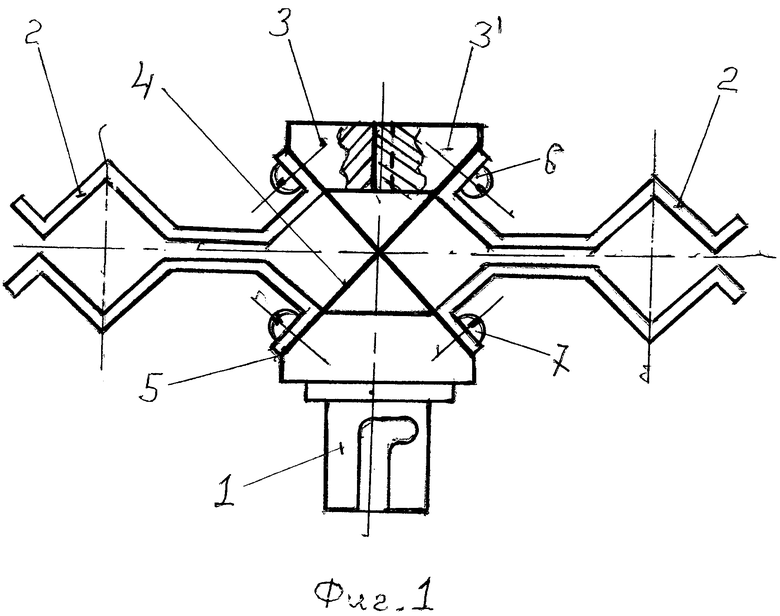
Захват манипулятора, работающего в герметизированном объеме, содержащий корпус, связанный с шарнирно установленными на нем губками посредством шарниров, отличающийся тем, что шарниры содержат упругие элементы, выполненные в виде пружин, установленных перпендикулярно друг другу, концы которых жестко закреплены последовательно в местах шарнирного соединения губок с корпусом, при этом пружины изготовлены из нитинола.
| Захват манипулятора | 1978 |
|
SU963849A1 |
| Захват манипулятора | 1991 |
|
SU1816686A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 1992 |
|
RU2043919C1 |
| Захват манипулятора | 1977 |
|
SU795939A1 |
| Захват манипулятора | 1979 |
|
SU837859A1 |
| KR 1020170101548 A, 06.09.2017. | |||

