/
4
4 СП СО ел
Изобретение относится к робототехиике, в частности к захватам роботов и манипуляторов.
Целью изобретения является расширение технологических возможностей.
На чертеже показано захватное устройство.
Захватное устройство содержит корпус 1 с жестко смонтированным на нем приводом 2 сжатия зажимных губок 3. Последние соечом 22 и сферическим упором 11 в зажатом положении детали остается некоторый зазор 5, необходимый для гарантированного заклинивания клином ролика.
При движении захватного устройства вместе с зажатой деталью и возникновении при этом инерционных сил, воздействующих на губки 3, рычаг 5 и ролик 15, последний, передавая эти усилия клину 18, еще силь„.. ., -„нее заклинивается им, таким образом, преддинены с приводом 2 с помощью шарнирных отвращая передачу нагрузки от инерцион- параллелограммов, включающих пары рыча- ных сил непосредственно на поршень приво- гов 4-6, через траверсы 7 и 8, подвижно ус- да, вызывает его дополнительное перемеще- тановленные на штоке-поршне 9 между его ние и раскрытие губок, упорами 10, 11 и 12, 13 соответственно. НаПосле переноса детали в заданную пози20
оси 14 шарниров губок 3 закреплены ролики 15 15, которые перемещаются в пазу 16, выполненном в корпусе 1. В этом же пазу размешен подпружиненный пружиной 17 клин 18, своей клиновой частью обращенный к ролику 15. Таких клинов может быть два, по одному в каждом пазу 16. Внутри клина смонтирована кулиса 19, подвижно соединенная с плечом 20 дополнительного двуплечего рычага, шарнирно установленного на корпусе 1 на оси 21. Второе его плечо 22 установлено с возможностью взаимодейст- 25 ВИЯ с одним из упоров штока 9, например с упором 11, который для обеспечения хорошего контакта с рычагом имеет сферическую поверхность.
Устройство работает следующим образом
цию сжатый воздух подается в поршневую полость привода и его шток 9 перемещается вправо. Процесс раскрытия губок осуществляется в обратном порядке, а клин 18 возвращается в исходное положение под действием на кулису 19 плеча 20 рычага, который поворачивается вокруг оси 21 при давлении на плечо 22 упора И. Клин 18 освобождает ролик 15, приводя захватное устройство в исходное положение.
Захватное устройство позволяет без увеличения объема и мощности привода сжатия обеспечить надежное зажатие деталей большой массы и удержание их при переносе с .большой скоростью. Кроме того, гарантированная надежность захвата позволяет уни-,J.-„J...- , фицировать зажимные губки, т.е. не измеВ штоковую полость привода 2 подается няя их формы, обеспечить захват деталей воздух, шток 9 перемещается влево, упоры
10и 12 отходят от торцов соответствующих траверс 7 и 8, которые некоторое время остаются еще неподвижными. Далее после взаимодействия траверс с другой парой упоров , Захватное устройство, содержащее за11и 12 начинается передача усилия от при- жимные губки, связанные со щтоком приво- вода через рычаги 4-6 шарнирных парал- да посредством шарнирных параллелограм- лелограммов к губкам 3, которые зажимают
деталь требуемым усилием. При ходе штока
влево ролик 15, перемещаясь под действием
рычагов 4 и 6 по пазу 16, освобождает клин 40
18, который под действием пружины 17 и
в результате отвода упора 11 от двуплечего
рычага начинает также двигаться по пазу
16 до контакта с роликом 15. Одновременно
клин 18 через кулису 19 воздействует на пле- д штоком привода, а другим - с дополнитель40 20 двуплечего рычага, который поворачи- но введенным клином, размещенным в пазу
вается вокруг оси 21. Клин 18, встретившись и имеюшим возможность взаимодействия с
с роликом 15, заклинивает его. Между пле- роликом.
различных конфигураций.
Формула изобретения
мов и с корпусом через ролики, размешенные в пазах, выполненных параллельно заданной траектории движения, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено подпружиненными двуплечими рычагами, шарнирно установленными на корпусе, имеющими возможность взаимодействия одним плечом со
цию сжатый воздух подается в поршневую полость привода и его шток 9 перемещается вправо. Процесс раскрытия губок осуществляется в обратном порядке, а клин 18 возвращается в исходное положение под действием на кулису 19 плеча 20 рычага, который поворачивается вокруг оси 21 при давлении на плечо 22 упора И. Клин 18 освобождает ролик 15, приводя захватное устройство в исходное положение.
Захватное устройство позволяет без увеличения объема и мощности привода сжатия обеспечить надежное зажатие деталей большой массы и удержание их при переносе с .большой скоростью. Кроме того, гарантированная надежность захвата позволяет уни няя их формы, обеспечить захва
Захватное устройство, содерж
различных конфигураций.
Формула изобретения
жимные губки, связанные со щтоком приво- да посредством шарнирных параллелограм-
мов и с корпусом через ролики, размешенные в пазах, выполненных параллельно заданной траектории движения, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено подпружиненными двуплечими рычагами, шарнирно установленными на корпусе, имеющими возможность взаимодействия одним плечом со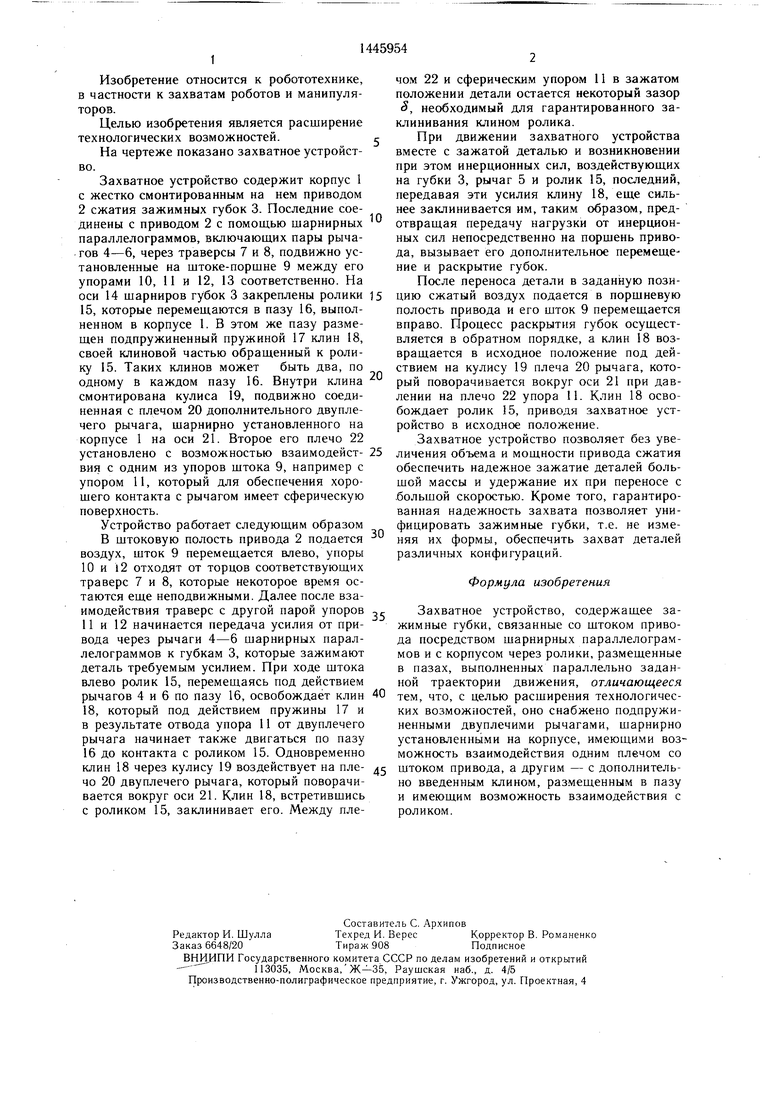
| название | год | авторы | номер документа |
|---|---|---|---|
| Перекладыватель заготовок к прессу | 1979 |
|
SU863427A1 |
| Загрузочное устройство транспортного ротора | 1990 |
|
SU1717310A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
| Захват | 1977 |
|
SU667396A1 |
| Схват манипулятора | 1982 |
|
SU1068281A1 |
| Захватное устройство | 1987 |
|
SU1473944A1 |
| Захват | 1981 |
|
SU984862A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| Ткацкий станок | 1964 |
|
SU472177A1 |
Изобретение относится к робототехнике, в частности к захватам роботов и манипуляторов. Целью изобретения является повышение надежности работы захватного устройства путем предотвращения воздействия на привод инерциальных сил. При перемещении щтока 9 влево упоры 10 и 12 отходят от торцов соответствующих траверс 7 и 8, которые некоторое время остаются еще неподвижными. Далее носите взаимодействия траверс с другой парой упоров 11 и 12 начинается передача усилия от привода через рычаги 4, 5, 6 к губкам 3, которые зажимают деталь требуемым усилием. При ходе штока влево ролик 15, перемещаясь под действием рычагов 4 и 6 по пазу 16, освобождает клин 18, который под действием рычагов 4 и 6 по пазу 16, освобождает к/тин 18, который под действием пружины 17 начинает двигаться по пазу 16 до контакта с роликом 15. Одновременно клин 18 через кулису 19 воздействует на плечо 20 двуплечего рычага, который поворачивается вокруг оси 21. Клин 20, встретившись с роликом 15, заклинивает его. Процесс раскрытия губок осуществляется в обратном порядке. 1 ил. р СЛ
| Захват манипулятора | 1981 |
|
SU988548A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
