«
Л
Oi
О5
СА:
СП
NJ
тпрованные на осях 3 корпуса 1, и яривод перемещения губок 2. Привод ci CioHT из штока 4, неподвижно установленного в корпусе 1, и из цилиндра 5, подвижного относительно штока А. Между крышками 6 циj индpa 5 установ- подвижные клин 7 и стакан 8, ,иружиненные относительно друг друга пружиной 9. На губках 2 выполнены выступы 10, имеющие возможность взаимодействия с внутренней конической поверхностью стакана 8. Конусная поверхность стакана 8 параллельна поверхности выступов 10 и клина 7. При 1еремеще ии цилиндра 5 вверх стакан 8, взаимодействуя с выступами 10, сводит губки 2 и происходит захват детали за наружную поверхность 1или освобождение детали, взятой за внутреннюю поверхность. При леремещении цилиндра 5 вниз клин 7, взаимодействуя с клиновой поверхностью губок 2, разводит губки 2 и происходит освобождение детали, взятой за наружную поверхность, или взятие детали за внутреннюю поверхность. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1987 |
|
SU1445952A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ЗАГОТОВОК | 1990 |
|
RU2006330C1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
Изобретение относится к машиностроению. Цель изобретения - расширение технологических возможностей за счет обеспечения захвата деталей как за внутреннюю, так и за наружную поверхности. Захват манипулятора содержит корпус 1, зажимные губки 2, смонтированные на осях 3 корпуса 1, и привод перемещения губок 2. Привод состоит из штока 4, неподвижно установленного в корпусе 1, и из цилиндра 5, подвижного относительно штока 4. Между крышками 6 цилиндра 5 установлены подвижные клин 7 и стакан 8, подпружиненные относительно друг друга пружиной 9. На губках 2 выполнены выступы 10, имеющие возможность взаимодействия с внутренней конической поверхностью стакана 8. Конусная поверхность стакана 8 параллельна поверхности выступов 10 и клина 7. При перемещении цилиндра 5 вверх стакан 8, взаимодействуя с выступами 10, сводит губки 2 и происходит захват детали за наружную поверхность или освобождение детали, взятой за внутреннюю поверхность. При перемещении цилиндра 5 вниз клин 7, взаимодействуя с клиновой поверхностью губок 2, разводит губки 2 и происходит освобождение детали, взятой за наружную поверхность, или взятие детали за внутреннюю поверхность. 2 ил.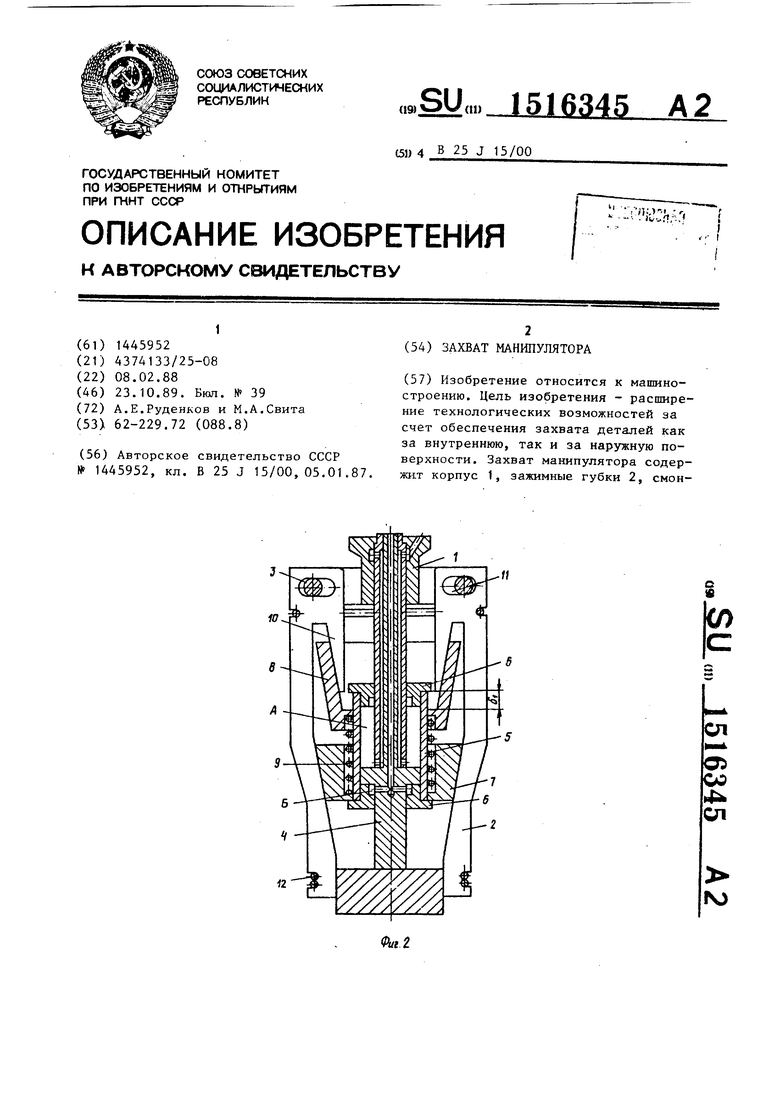
Изобретение относится к машиностроению, может быть использовано при создании работотехнических комплексов и является усовершенствованием изоб1)етения по авт. св. № 1445952.
Цель изобретения - расширение тexнoлoгичecкиk возможностей за счет обеспечения захвата деталей как за внутреннюю, так и за наружную поверхность.
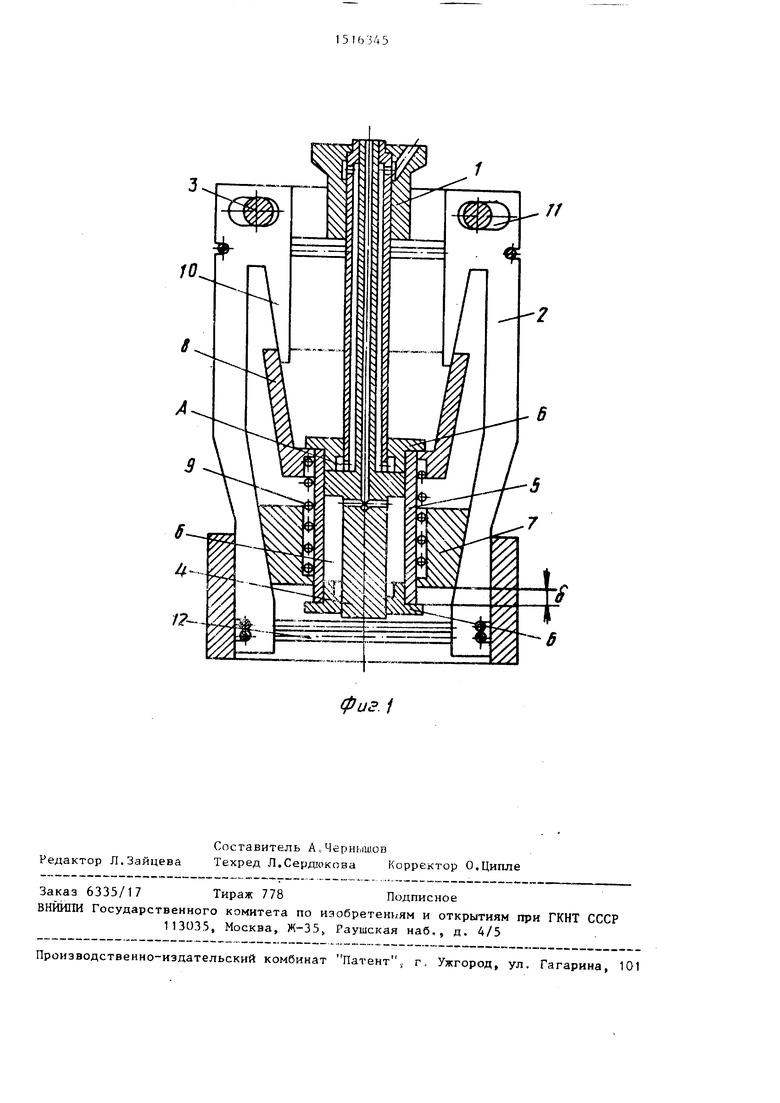
На фиг.1 изображен захват манипулятора с захваченной деталью за внутреннюю поверхность; на фиг.2 - то же, с захваченной деталью за наружную поверхность.
Захват манипулятора содержит корпус 1, зажим;1ые губки 2, смонтированные на осях 3 корпуса 1, и привод перемещения губок 2. Привод состоит из штока 4, неподвижно установленного в корпусе 1, и из цилиндров 5, под- .го относительно штока 4. Между крышками 6 цилиндра 5 установлены подвижные клин 7 и стакан 8, которые гюдпружинены относительно друг друга пружино 9. На губках 2 выполнены выступы 10, имеющие возможность взаимодействия с внутренней конической поверхностью стакана 8, Соприкасающиеся поверхности выступов 10 и стакана 8 пар аллельны поверхности KjH-fHa7c Каждая из полостей цилиндра А и Б ограничена внутренней поверхнс)стью цилиндра 5, наружной поверхностью штока 4 и крьш1кой 6 и соединена с источником давления (не показан). В губках 2 в местах их соединенна с корпусом 1 выполнены пазы 11. Губки 2 охвачены кольцевыми пружинами 12. li.ixBaT манипулятора работает слеДУЮШД1М ОбрсЧЗОМ.
В исходном положении перед захватыванием объекта за внутреннюю по- верхност) давление, поданное в полость А, удерживает в верхнем положении цилиндр 5. Губки 2 сведены кольцевыми пружинами 12, Для взятия дета5 ли захват вводится в ее отверстие, давление подается в полость Б, а полость А цилиндра 5 соединяется со сливом. Цилиндр 5 с подпружинечным KjuiHOM 7 перемещаете вниз, (таздвиц гая губки 2 по пазам 11 парал,1ельно плоскости отверстия захватываемой детали до касания с ее поверхно стью. Деталь оказывается захваченной раз- я:атьл- и губками, причем удерживание цетапп происходит по плоскости. При дальнейшем движении цилиндра 5 пру- ;кииа 9 поджимает клин 7, в конце хода образуется fj клином 7 и крышкой 6. В случае внезапного падения давления в пол-ОСти Б цилиндра 5 усилие захвата остается доста- T04Hbiivi для удержания детали за счет поджатия клина 7 пружиной 9, При ос- робождении объекта давление подает- , с.ч а полость А, а полость Б цилиндра 5 соединяется со сливом. Цилиндр 5 и клин 7 перемещаются Вверх, губки 2 сводятся и освобождают деталь.
0
Для захвата детали за наружную
порерхность в исходном положении давление, поданное в полость Б, удерживает р нижнем положении цилиндр 5. Губки 2 разведены клином 7. Для взятия детали захват опускают на деталь до соприкосновения ее со штоком 4, давление подается в полость А,, а полость Б цилиндра 5 соединяется со сливом. Цилиндр 5 с подпружиненным
513
стаканом 8 перемещается вверх, взаимодействуя с выступами 10, сдвигая губки 2 до касания их с поверхностью детали. Деталь оказывается захваченной сжАтыми губками. При дальнейшем движении цилиндра 5 пружина 9 поджимает стакан 8, в конце хода образуется зазор между стаканом 8 и крышкой 6. В случае внезапного падения давления в полости А цилиндра 5 при захваченном объекте усилие захвата остается достаточным для удержания детали за счет поджатия стакана 8 пружиной 9. При освобождении объекта давление подается в полость Б, а полость А цилиндра соединяется со сливом. Цилиндр 5 и стакан 8 пере163456
мещаются вниз, губки 2 разводятся и освобождают деталь.
Формула изобретения gЗахват манипулятора по авт. св.
№ 1445952, отличающийся
гических возможностей, захват снабжен подпружиненным относительно клина стаканом, установленным на цилиндре с возможностью возвратно-поступательного перемещения, а внутренняя поверхность стакана выполнена конической с возможностью взаимодействия
с выполненными в верхней части губок выступами, при этом коническая поверхность стакана конгруентна поверхности клина.
fO
//
иг. i
| Захват манипулятора | 1987 |
|
SU1445952A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
