Изобретение относится к области неразрушающего ультразвукового контроля рельсов и может использоваться при ультразвуковой дефектоскопии рельсов железнодорожной инфраструктуры и метрополитена.
Одним из актуальных вопросов в области сплошного ультразвукового контроля рельсов является проблема выделения на ультразвуковой дефектограмме полезного сигнала на фоне шумов и помех.
Известные способы ультразвукового контроля рельсов в подавляющем большинстве основаны на измерении амплитуды принятого сигнала от дефекта или искусственного отражателя и последующем измерении уровня шума на бездефектном участке рельса. После набора статистических данных делают вывод о том, что при выявлении отражателя (дефекта или конструктивного элемента) определенных размеров будет обеспечиваться необходимое соотношение сигнал/шум с заданной вероятностью. При этом для задания браковочной чувствительности получают принятый сигнал от контрольного отражателя, а признаком обнаружения дефекта является получение принятого сигнала с амплитудой, превышающей заданный уровень, являющийся браковочным (Межгосударственный стандарт ГОСТ 18576-96. «Контроль неразрушающий. Рельсы железнодорожные. Методы ультразвуковые». Издательство стандартов. М., 2001). Однако диапазон видимых сигналов, находящихся ниже стандартного уровня (половины высоты экрана дефектоскопа), зрительно ограничен, а добавление усиления (повышение чувствительности) в целях обнаружения дефектов на ранней стадии развития (малых размеров) не дает результата, поскольку помимо полезных сигналов возрастает и амплитуда шумовых сигналов, что с большой долей вероятности может привести к ложной браковке.
Известен, например, способ ультразвукового контроля рельсов, при котором размещают в заданной зоне сканирования ультразвуковой преобразователь и проводят операции контроля, включающие зондирование импульсами ультразвуковой частоты, регистрацию принятых сигналов посредством дефектоскопа с обеспечением их визуализации в виде амплитудно-временной развертки, выделение на ней соответствующей заданной зоне сканирования временной зоны (зоны селекции), апертуру которой выбирают из условия невхождения в нее зондирующего импульса, задание критерия полезности сигнала в виде строб-импульса, уровень которого соответствует заданной чувствительности контроля, и анализ зарегистрированных в этой временной зоне принятых сигналов, перемещают ультразвуковой преобразователь в зоне сканирования и повторяют операции контроля (А.А. Марков, Д.А. Шпагин. Ультразвуковая дефектоскопия рельсов. Учебное пособие. «Образование-культура», Санкт-Петербург, 2008, с. 51-53, 88-100). В этом способе для задания критерия полезности сигнала используют строб-импульс в соответствии с заданной чувствительностью контроля, при которой может быть выявлен минимальный дефект. При этом дефектоскоп идентифицирует принятый сигнал как полезный, когда он попадает в выделенную временную зону и его уровень превышает уровень строб-импульса.
Однако такой способ не дает достаточно достоверных результатов, что связано с зависимостью результатов контроля от качества акустического контакта ультразвукового преобразователя с контролируемым объектом и влиянием субъективных факторов, например, некорректной настройки чувствительности. Этот недостаток способа особенно проявляется при сплошном контроле рельсов на больших скоростях. Потеря акустического контакта при этом неизбежна, а существенное падение уровня отраженных сигналов приводит к пропуску дефектов в рельсе. Возможна и иная ситуация, при которой происходит существенное возрастание амплитуд сигналов, приводящее к перебраковке. Поэтому традиционная методика контроля, заключающаяся в принятии решения о браковке «сверху», обладает низким уровнем достоверности результатов контроля.
Известен также способ ультразвукового контроля рельсов, при котором размещают в заданной зоне сканирования ультразвуковой преобразователь и проводят операции контроля, включающие зондирование импульсами ультразвуковой частоты, регистрацию принятых сигналов посредством дефектоскопа с обеспечением их визуализации в виде амплитудно-временной развертки, выделение на ней соответствующей заданной зоне сканирования временной зоны, апертуру которой выбирают из условия невхождения в нее зондирующего импульса, задание критерия полезности сигнала и анализ зарегистрированных в этой временной зоне принятых сигналов, включающий определение их амплитуд через заданный промежуток времени, перемещают ультразвуковой преобразователь в зоне сканирования и повторяют операции контроля, при этом в выделенной временной зоне формируют адаптивный порог на основе скорости нарастания переднего фронта принятого сигнала за заданный промежуток времени и прибавляемого к амплитуде шумового сигнала смещения, величины которых выбирают в зависимости от типа используемого ультразвукового преобразователя, в качестве критерия полезности сигнала выбирают превышение амплитудой сигнала адаптивного порога при заданной скорости нарастания переднего фронта сигнала и если приращение амплитуды за заданный промежуток времени больше заданного значения, адаптивный порог формируют из этого заданного значения, а если это приращение меньше заданного значения или равно ему, адаптивный порог считают полностью повторяющим форму сигнала и, соответственно, сигнал считают шумовым (RU 2662464 С1, 2018).
Однако в этом способ выбранные параметры расчета адаптивного порога существенно зависят от характера анализируемых сигналов (например, с плавным или резким нарастанием/спадом импульса ультразвуковой частоты). Это также снижает достоверность ультразвукового контроля рельсов.
Из известных способов наиболее близким к предложенному является способ ультразвукового контроля рельсов, при котором размещают в заданной зоне сканирования ультразвуковой преобразователь и проводят операции контроля, включающие зондирование импульсами ультразвуковой частоты, регистрацию отраженных сигналов посредством дефектоскопа с обеспечением их визуализации в виде амплитудно-временной развертки, выделение на ней соответствующей заданной зоне сканирования временной зоны, апертуру которой выбирают из условия невхождения в нее зондирующего импульса, задание критерия полезности сигнала и анализ зарегистрированных в этой временной зоне отраженных сигналов, перемещают ультразвуковой преобразователь в зоне сканирования и повторяют операции контроля, в выделенной временной зоне определяют среднеарифметическое значение амплитуд принятых сигналов через задаваемый дефектоскопом шаг, амплитуда N которых находится в диапазоне, удовлетворяющему условию N ≤ N1 - N2, где N1 - динамический диапазон отображаемых на экране дефектоскопа сигналов, N2 - критерий квалификации сигнала как полезного, а в качестве критерия полезности сигнала выбирают превышение его амплитуды этого среднеарифметического значения на величину N2 ≥ 12 дБ (RU 2472143 С1, 2013). Временную зону в этом способе выбирают из временной апертуры исходя из условия, чтобы зондирующий ультразвуковой импульс не входил в эту зону, поскольку вследствие значительной амплитуды он может внести существенную погрешность в расчет среднеарифметического значения амплитуд сигналов в выбранной временной зоне. Для расчета среднеарифметического значения сигналов используют диапазон амплитуд так, что амплитуда N этих сигналов не превышает разницы между динамическим диапазоном N1 отображаемых на экране дефектоскопа сигналов и критерия N2 квалификации сигнала как полезного. Такой подход при определении среднеарифметического значения отраженных сигналов (эхо-сигналов) наиболее оптимален, он позволяет, в частности, устранить неопределенность в принятии решения о полезности сигналов, когда они имеют значительную амплитуду, например, сигналы от отражателей в виде конструктивных элементов в рельсах.
Однако этот способ также не обеспечивает необходимую достоверность ультразвукового контроля рельсов. Это связано со следующими обстоятельствами. На дефектограммах даже вне зоны болтовых или сварных стыков возможно присутствие большого количества шумовых сигналов (шумовых дорожек), связанных с диффузным отражением ультразвуковых волн от различных зон головки рельса и обусловленных качеством отражающих поверхностей (например, загрязнений, сетки термических трещин). Шумовые сигналы могут иметь амплитуду, соизмеримую с амплитудой принятых полезных (основных) сигналов. Поэтому среднеарифметическое значение амплитуд шумовых сигналов в каждом цикле излучения-приема может достигать существенных значений, что в свою очередь может привести лишь к незначительному превышению полезного сигнала уровня шумов, а, следовательно, и к пропуску дефектов. Кроме того, наличие шумовых дорожек и шумового фона в целом значительно затрудняет процесс визуальной оценки дефектограмм.
Техническая проблема, решаемая изобретением, состоит в создании способа ультразвукового контроля, лишенного недостатков прототипа. Технический результат изобретения заключается в повышении достоверности ультразвукового контроля рельсов.
Это достигается тем, что в способе ультразвукового контроля рельсов, при котором размещают в заданной зоне сканирования ультразвуковой преобразователь и проводят операции контроля, включающие зондирование импульсами ультразвуковой частоты, регистрацию отраженных сигналов посредством дефектоскопа с обеспечением их визуализации в виде амплитудно-временной развертки, выделение на ней соответствующей заданной зоне сканирования временной зоны, апертуру которой выбирают из условия невхождения в нее зондирующего импульса, задание критерия полезности сигнала и анализ зарегистрированных в этой временной зоне отраженных сигналов, перемещают ультразвуковой преобразователь в зоне сканирования и повторяют операции контроля, в выделенной временной зоне определяют среднеарифметическое значение амплитуд принятых сигналов через задаваемый дефектоскопом шаг, амплитуда N которых находится в диапазоне, удовлетворяющему условию N ≤ N1 - N2, где - динамический диапазон отображаемых на экране дефектоскопа сигналов, N2 - критерий квалификации сигнала как полезного, а в качестве критерия полезности сигнала выбирают превышение его амплитуды этого среднеарифметического значения на величину N2 ≥ 12 дБ, каждый сигнал, амплитуда которого превышает полученное среднеарифметическое значение на величину N2≥12 дБ, в заданной зоне сканирования формируют в результате накопления за счет дополнительного суммирования сигналов с учетом сдвига по времени сигналов один относительно другого, соответствующего перемещению ультразвукового преобразователя в процессе сканирования, в n циклах сканирования, в которых амплитуда принятых сигналов превышает уровень -6 дБ в границах основного лепестка диаграммы направленности ультразвукового преобразователя, при этом n = m, где m - количество максимумов этих сигналов.
Указанный технический результат обеспечивается всей представленной в формуле изобретения совокупностью существенных признаков, каждый из которых необходим, а вместе они достаточны для решения указанной технической проблемы и для достижения указанного технического результата.
Заявленное изобретение является зависимым по отношению к изобретению, охраняемому патентом РФ №2472143.
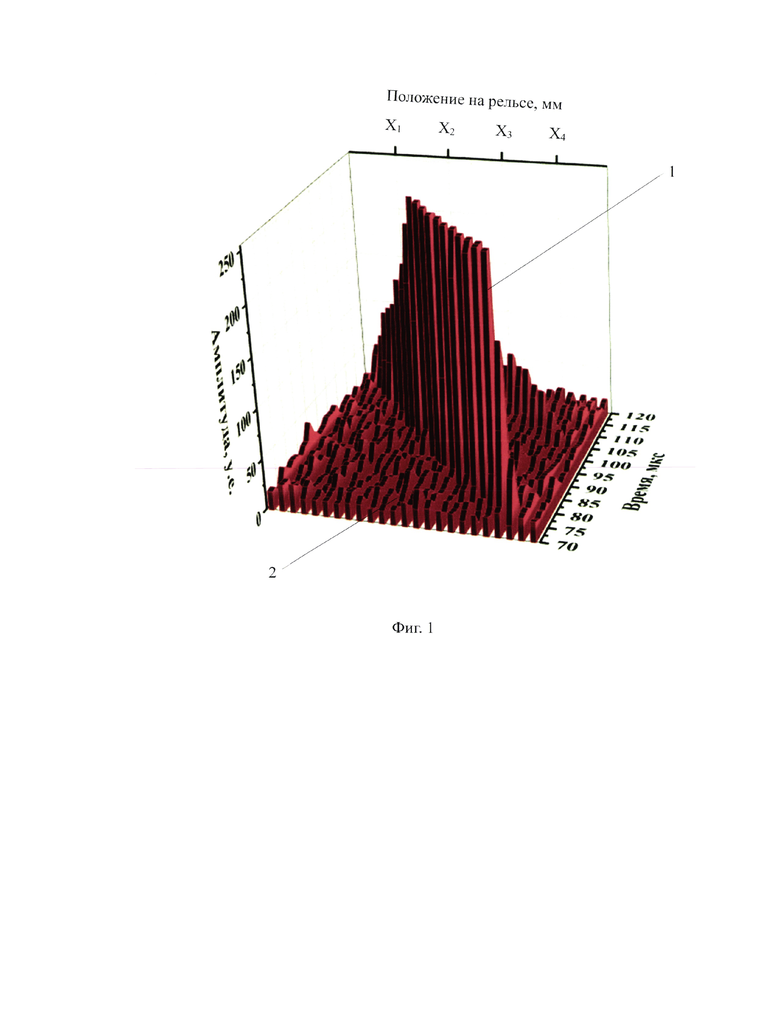
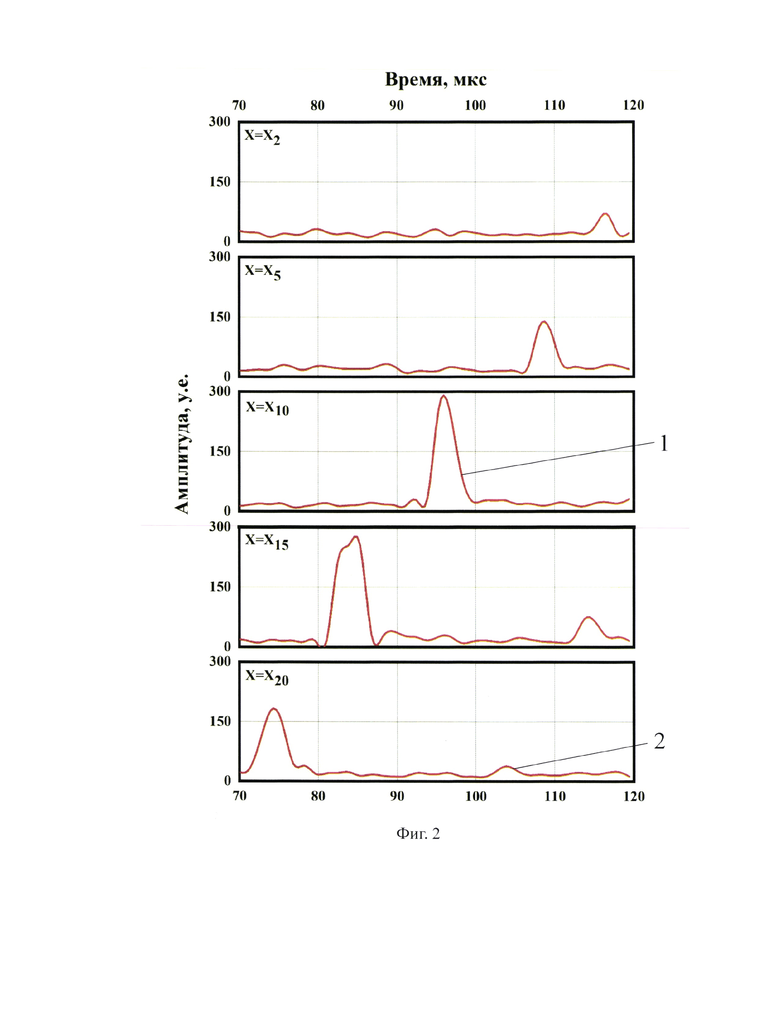
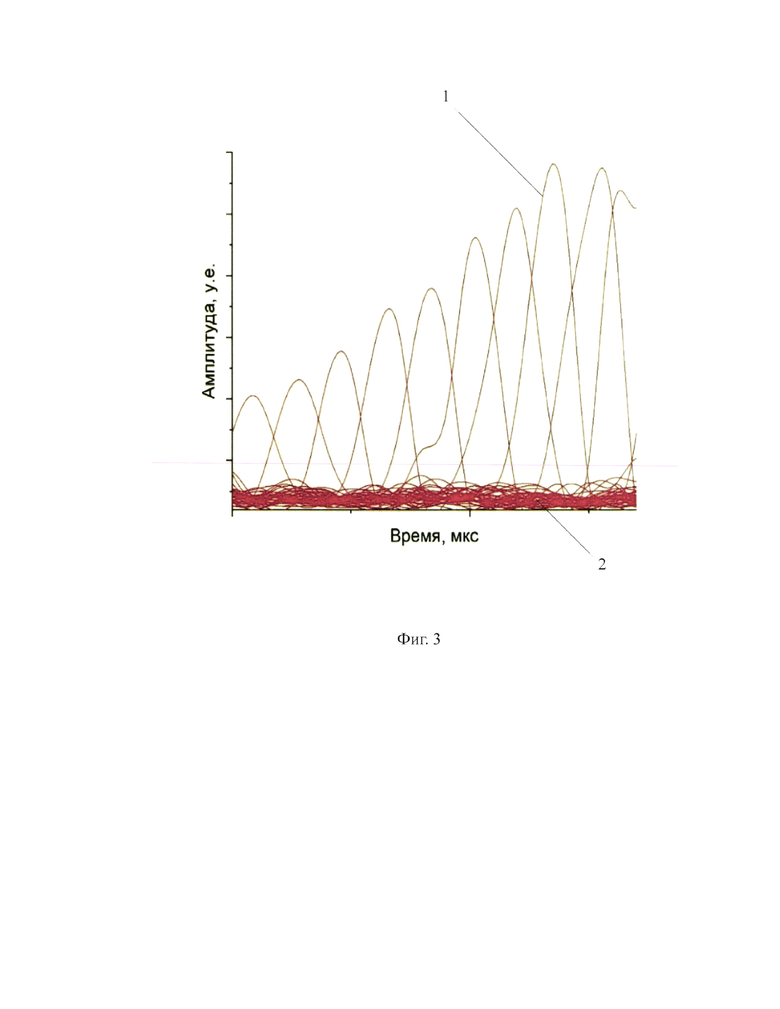
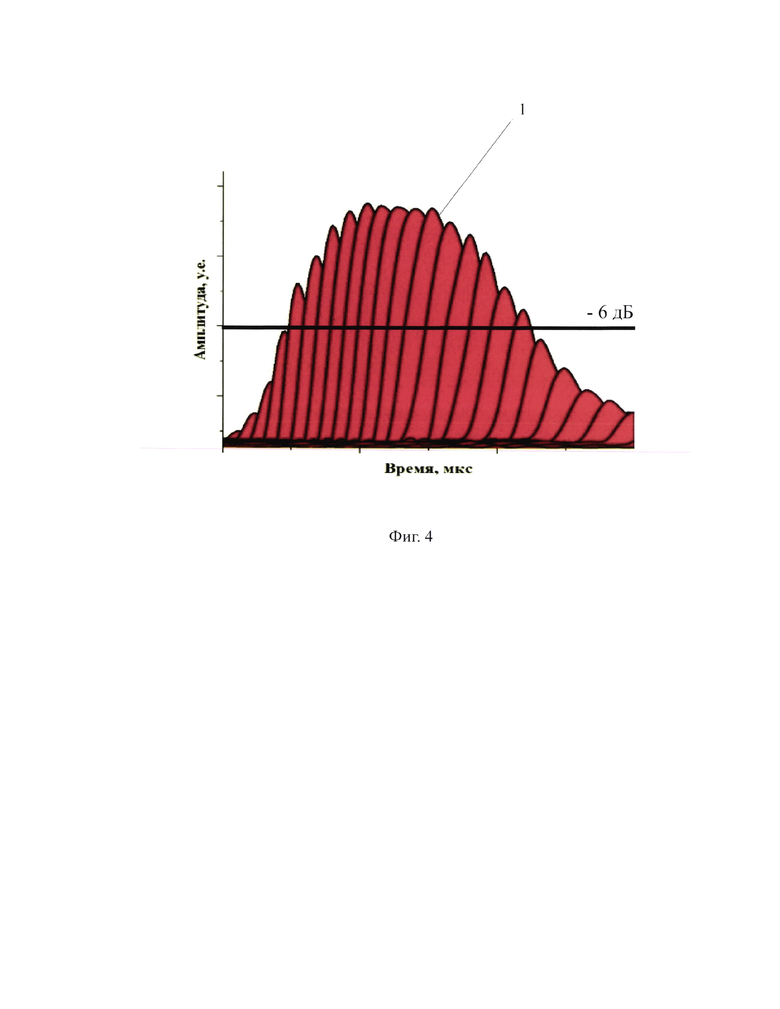
На фиг.1 отображена дефектоскопная информация в виде фрагмента развертки типа В. На фиг.2 показана последовательность отраженных сигналов от одного отражателя при перемещении ультразвукового преобразователя вдоль рельса в виде разверток типа А. Фиг. 3 поясняет сдвиги по времени сигналов при перемещении ультразвукового преобразователя относительно отражателя в рельсе. На фиг.4 показан пример количества циклов, участвующих в суммировании и усреднении при накоплении сигналов. На фиг.5 - фиг.7 отображены результаты осуществления изобретения.
В соответствии с предложенным способом выделяют в одном цикле излучения-приема ультразвукового, преимущественно пьезоэлектрического, преобразователя, установленного на контролируемый рельс, временной зоны для расчета в ней среднеарифметического значения амплитуд принятых сигналов. Временную зону выбирают из временной апертуры исходя из условия, чтобы зондирующий импульс не входил в эту зону, поскольку вследствие значительной амплитуды он может внести существенную погрешность в расчет среднеарифметического значения амплитуд сигналов в выбранной временной зоне. Для расчета среднеарифметического значения сигналов используют диапазон амплитуд так, что амплитуда N этих сигналов не превышает разницы между динамическим диапазоном N1 отображаемых на экране дефектоскопа сигналов и критерия N2 квалификации сигнала как полезного. Критерий полезности в виде превышения величины 12 дБ установлен экспериментальным путем. Этот подход при определении среднеарифметического значения отраженных сигналов позволяет, в частности, устранить неопределенность в принятии решения о полезности сигналов, когда они имеют значительную амплитуду, например, сигналы от конструктивных элементов в рельсах. Такие сигналы вносят существенный вклад в величину среднего уровня сигналов, что чревато повышением этого уровня и соответственно могло бы привести к пропуску дефектов.
Особенностью предложенного способа является накопление сигналов при сплошном ультразвуковом контроле рельсов путем суммирования сигналов с учетом сдвига по времени сигналов один относительно другого. Сдвиг обусловлен разницей во времени прихода ультразвуковых волн от ультразвукового преобразователя до отражателя и обратно при перемещении ультразвукового преобразователя вдоль рельса с установленным шагом сканирования, например, 5 мм. Поскольку при ультразвуковом контроле рельсов, например, посредством мобильного транспортного средства, ультразвуковой преобразователь, т.е. излучатель-приемник, движется относительно отражателя, поэтому сигналы от отражателя принимаются ультразвуковым преобразователем всегда с определенными интервалами друг относительно друга. Трехмерное изображение (развертка типа В) одного из вариантов набора сигналов, которые отображаются на дефектограмме при прохождении ультразвуковым преобразователем нескольких участков (сечений) рельса с расположенными в них отражателями, показано на фиг.1. Приведенные на фиг.1 фрагменты развертки типа В могут быть представлены в виде совокупности разверток типа А этого же сигнала. На фиг. 2 отображено несколько разверток типа А сигналов, поясняющих физику процесса. Как видно из фиг.2, полезный сигнал 1 от одного и того же отражателя при перемещении ультразвукового преобразователя вдоль рельса меняется как по амплитуде, так и по длительности. Такая же ситуация складывается и с шумовым сигналом 2. При накоплении сигналов путем их суммирования при движении ультразвукового преобразователя по рельсу необходимо учитывать их сдвиг по времени (временной сдвиг) Δt один относительно другого в каждом цикле сканирования (фиг.3). При этом одновременно с суммированием полезного сигнала происходит суммирование шумов, которые имеют случайное значение амплитуды. Их суммирование и усреднение снижает их энергетический вес в общей ультразвуковой картине при контроле рельсов, поскольку шумовые сигналы, как правило, не имеют огибающей, а их амплитуда носит случайный характер без выраженных нарастания и спада. К основным параметрам накопления сигналов при ультразвуковом контроле рельсов, помимо величины временного сдвига сигналов при изменении взаимного расположения пары ультразвуковой преобразователь-отражатель в процессе сканирования рельса, относится количество n циклов сканирования (суммирования), участвующих в суммировании и усреднении. Количество n циклов сканирования определяется как количество m максимумов амплитуд принятых сигналов от отражателей в границах основного лепестка диаграммы направленности ультразвукового преобразователя на уровне -6 дБ (n=m). При этом для шумовых сигналов величина n, как правило, существенно меньше, чем для полезных сигналов. Графически этот параметр поясняется фиг.4 для n=13. Выбор величины уровня -6 дБ обусловлен необходимостью исключения возможности пропуска дефектов при их выявлении не основным лепестком диаграммы направленности, что обеспечивается установкой поисковой чувствительности, превышающей контрольную в два раза, т.е. на 6 дБ. Такая обработка сигналов при ультразвуковой дефектоскопии приводит к значительному снижению отображения помех на дефектограмме и повышению четкости выделения полезных сигналов от отражателей в рельсе на фоне помех и шумов. Это повышает качество отображения данных ультразвукового контроля рельсов, например, в виде развертки типа В, и сводит к минимуму количество сторонних (не полезных) сигналов малой амплитуды, что позволяет объективно с достаточной точностью выявлять и идентифицировать дефекты в рельсах и, соответственно, повысить достоверность ультразвукового контроля рельсов.
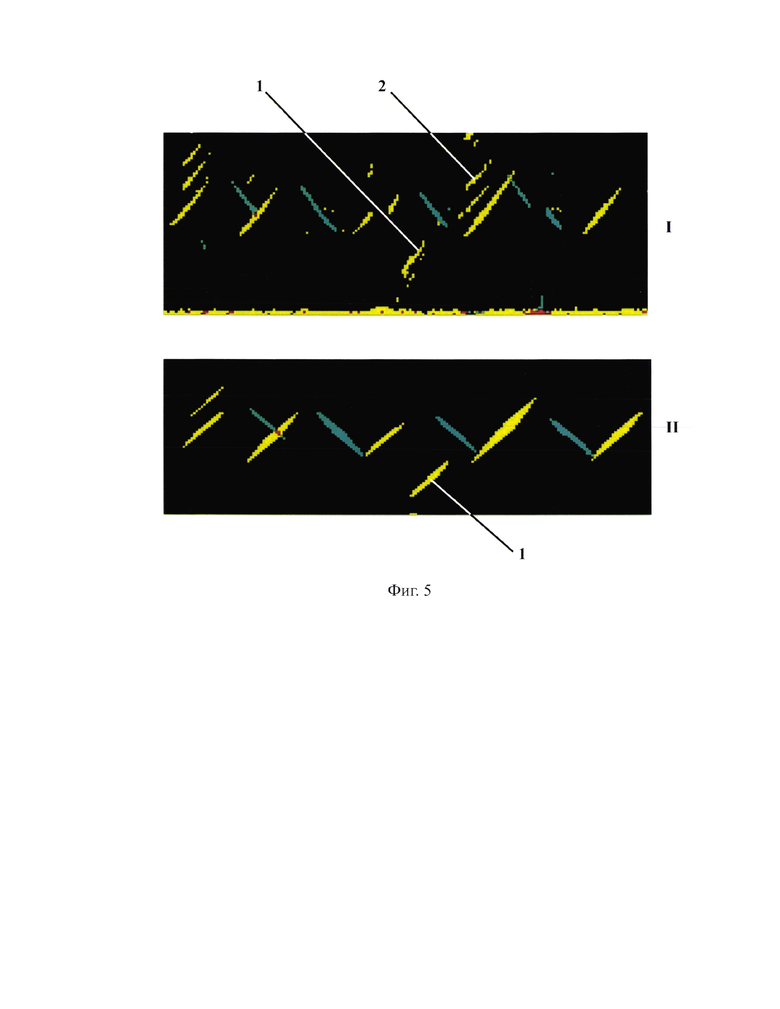
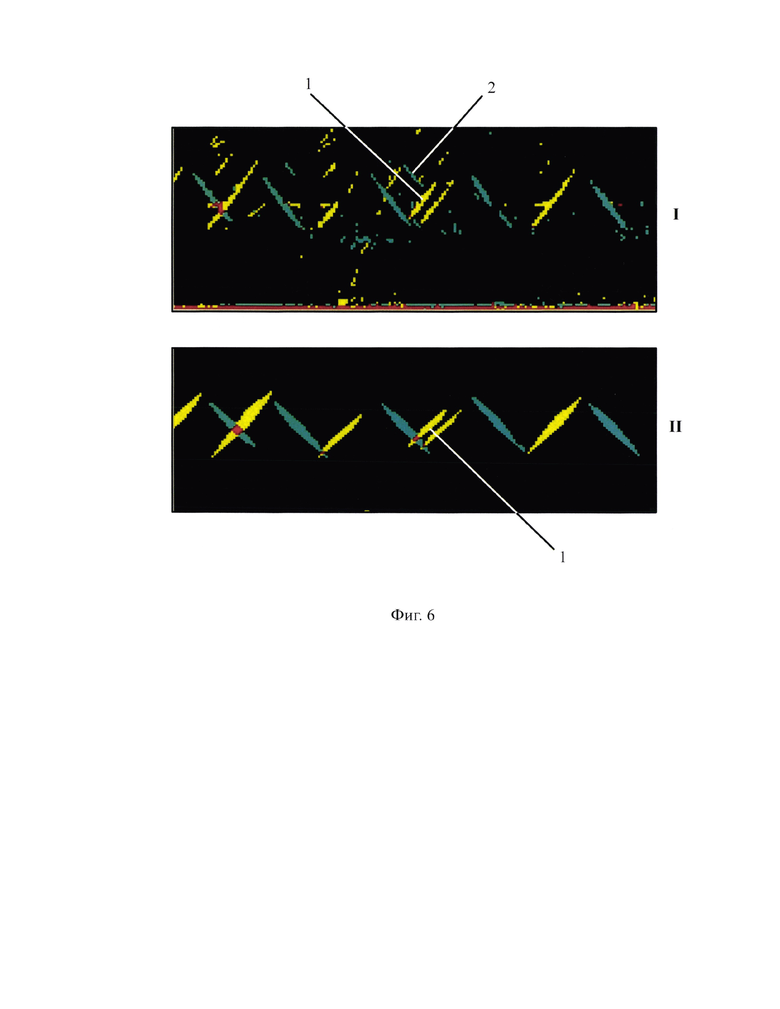
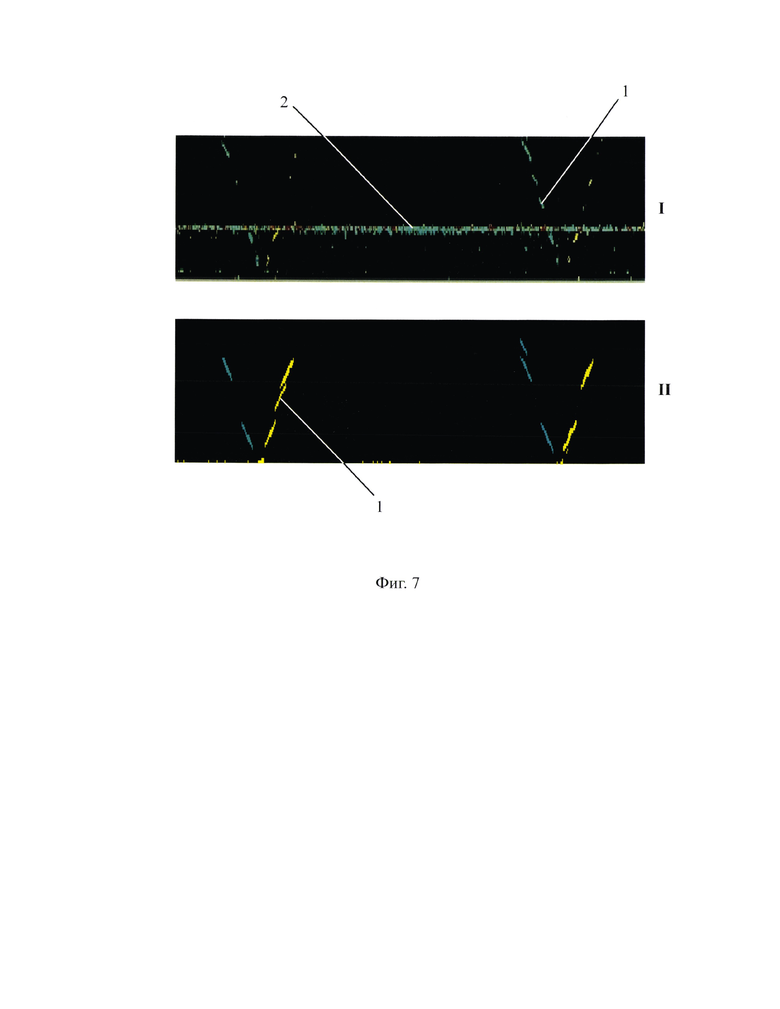
Примеры реализации. Проведены операции сплошного ультразвукового контроля рельсов на испытательном участке Московского центра диагностики и мониторинга устройств Перово-4 с использованием мобильного средства контроля автомотрисы СУПДК «СЕВЕР», оснащенной многоканальным дефектоскопом ЭХО-КОМПЛЕКС-2 (производства АО «Фирма ТВЕМА»). Сравнивались результаты контроля без накопления сигналов в соответствии со способом-прототипом и с накоплением сигналов в соответствии с предложенным способом. Результаты контроля поясняются фрагментами дефектограмм на фиг.5 - фиг.7, где отображены развертки типа В от ряда отражателей в рельсах, полученные способом-прототипом (изображения I) и предложенным способом (изображения II). При этом сигналы, зафиксированные ультразвуковыми преобразователями, излучающими в направлении движения автомотрисы (наезжающие), индицируются на дефектограммах голубым цветом, а сигналы, зафиксированные ультразвуковыми преобразователями, излучающими ультразвуковые волны в направлении, противоположном направлению движения автомотрисы (отъезжающие), индицируются желтым цветом. Один и тот же отражатель на дефектограмме записывается и наезжающим и отъезжающим ультразвуковым преобразователем. Дефектограммы фиг.5 и фиг. 6 получены с использованием в качестве ультразвукового преобразователя пьезоэлектрического преобразователя с углом ввода 42 градуса без разворота. Дефектограммы фиг.7 получены с использованием в качестве ультразвукового преобразователя пьезоэлектрического преобразователя с углом ввода 58 градусов и разворотом относительно продольной оси рельса 34 градуса. На фиг.5 на дефектограммах I и II отображены сигналы от болтовых отверстий болтовых стыков и сигнал от дефекта в виде горизонтальной трещины в галтельном переходе от головки к шейке рельса с выходом на торцевую поверхность рельса. На фиг.6 на дефектограммах I и II отображен ряд сигналов от болтовых отверстий болтовых стыков и один сигнал от дефекта, представляющего собой трещину, развивающуюся от цилиндрической стенки болтового отверстия болтового стыка. На фиг.7 на дефектограммах I и II отображены два сигнала от двух искусственных отражателей, имитирующих поперечные трещины в головке рельса. Из приведенных изображений следует, что предложенный способ обеспечивает по сравнению со способом-прототипом значительно более высокое качество отображения данных ультразвукового контроля рельсов, практически полное устранение шумовых сигналов 2 и увеличение условных размеров отражателей в рельсах. Многократное повторение проездов показало тот же результат, при этом не было зафиксировано случаев пропуска дефектов.
Проведенные испытания подтверждают вывод о повышении достоверности ультразвукового контроля рельсов по сравнению со способом-прототипом.
Способ ультразвукового контроля рельсов, реализуемый в соответствии с изобретением, обеспечивает более высокую достоверность ультразвукового контроля рельсов по сравнению с аналогичными известными способами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2011 |
|
RU2472143C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2017 |
|
RU2662464C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ИЗДЕЛИЙ | 2001 |
|
RU2184373C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЛИНЫ ПАТРУБКА, ВЫСТУПАЮЩЕГО ВНУТРЬ ТРУБЫ ТРОЙНИКОВОГО СОЕДИНЕНИЯ, ЭХО-СИГНАЛОМ | 2014 |
|
RU2556316C1 |
| Способ динамической корректировки чувствительности дефектоскопических средств при высокоскоростном контроле длинномерных объектов | 2021 |
|
RU2774096C1 |
| Способ прогнозирования развитий аномалий в головке рельсов | 2019 |
|
RU2699942C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1999 |
|
RU2149393C1 |
| Способ оценки работоспособности дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2753810C1 |
| Способ внутритрубного ультразвукового контроля сварных швов | 2016 |
|
RU2621216C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2023 |
|
RU2809185C1 |
Использование: для ультразвукового контроля рельсов. Сущность изобретения заключается в том, что размещают в заданной зоне сканирования ультразвуковой преобразователь (УЗП) и проводят операции контроля, включающие зондирование импульсами ультразвуковой частоты, регистрацию отраженных сигналов посредством дефектоскопа с обеспечением их визуализации в виде амплитудно-временной развертки. На развертке выделяют соответствующую заданной зоне сканирования временную зону, апертуру которой выбирают из условия невхождения в нее зондирующего импульса, задают критерий полезности сигнала и проводят анализ зарегистрированных в этой временной зоне отраженных сигналов. Перемещают УЗП в зоне сканирования и повторяют операции контроля. В выделенной временной зоне определяют среднеарифметическое значение амплитуд принятых сигналов через задаваемый дефектоскопом шаг, амплитуда N которых находится в диапазоне, удовлетворяющем условию N ≤ N1 - N2, где N1 - динамический диапазон отображаемых на экране дефектоскопа сигналов, N2 - критерий квалификации сигнала как полезного. В качестве критерия полезности сигнала выбирают превышение его амплитуды этого среднеарифметического значения на величину N2 ≥ 12 дБ. Каждый сигнал, амплитуда которого превышает полученное среднеарифметическое значение на величину N2 ≥ 12 дБ, в заданной зоне сканирования формируют в результате накопления за счет дополнительного суммирования сигналов с учетом сдвига по времени сигналов один относительно другого, соответствующего перемещению УЗП в процессе сканирования, в n циклах сканирования, в которых амплитуда принятых сигналов превышает уровень -6 дБ в границах основного лепестка диаграммы направленности УЗП. При этом n = m, где m - количество максимумов этих сигналов. Технический результат: обеспечение возможности повышения достоверности ультразвукового контроля рельсов. 7 ил.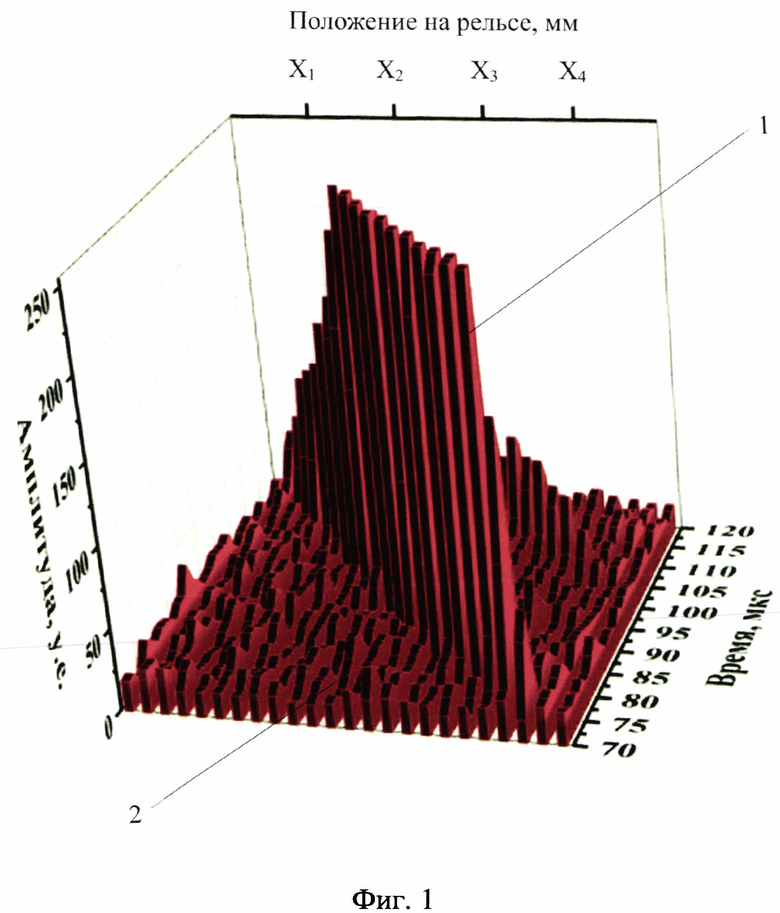
Способ ультразвукового контроля рельсов, при котором размещают в заданной зоне сканирования ультразвуковой преобразователь и проводят операции контроля, включающие зондирование импульсами ультразвуковой частоты, регистрацию отраженных сигналов посредством дефектоскопа с обеспечением их визуализации в виде амплитудно-временной развертки, выделение на ней соответствующей заданной зоне сканирования временной зоны, апертуру которой выбирают из условия невхождения в нее зондирующего импульса, задание критерия полезности сигнала и анализ зарегистрированных в этой временной зоне отраженных сигналов, перемещают ультразвуковой преобразователь в зоне сканирования и повторяют операции контроля, в выделенной временной зоне определяют среднеарифметическое значение амплитуд принятых сигналов через задаваемый дефектоскопом шаг, амплитуда N которых находится в диапазоне, удовлетворяющем условию N ≤ N1 - N2, где N1 - динамический диапазон отображаемых на экране дефектоскопа сигналов, N2 - критерий квалификации сигнала как полезного, а в качестве критерия полезности сигнала выбирают превышение его амплитуды этого среднеарифметического значения на величину N2 ≥ 12 дБ, отличающийся тем, что каждый сигнал, амплитуда которого превышает полученное среднеарифметическое значение на величину N2 ≥ 12 дБ, в заданной зоне сканирования формируют в результате накопления за счет дополнительного суммирования сигналов с учетом сдвига по времени сигналов один относительно другого, соответствующего перемещению ультразвукового преобразователя в процессе сканирования, в n циклах сканирования, в которых амплитуда принятых сигналов превышает уровень -6 дБ в границах основного лепестка диаграммы направленности ультразвукового преобразователя, при этом n = m, где m - количество максимумов этих сигналов.
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2011 |
|
RU2472143C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ЭКВИДИСТАНТНЫМИ ПОВЕРХНОСТЯМИ | 2020 |
|
RU2725705C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В РЕЛЬСАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2723146C1 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |
| Способ определения плотности заряда в диэлектриках | 1987 |
|
SU1471152A1 |
| JP 9274020 A, 21.10.1997. | |||

