Изобретение относится к области радиотехники, навигации и может быть использовано для расчета трехмерных координат летательного аппарата дальномерным методом при расположении станций с известными координатами на равнинной местности.
Известен способ нахождения трехмерных координат целей (см. например, А.В. Бычков А.В., Пелипенко И.И. Алгоритм нахождения трехмерных координат целей в многопозиционной радиолокации без пеленгации. Вестник СибГУТИ. 2015. №2. С. 93-98). Недостатком указанного способа является большой объем вычислений, связанный с многократным использованием последовательных приближений к истинному положению цели, что может привести к возникновению погрешностей в оценке координат.
Известен способ определения трехмерных координат летательного аппарата (см. Патент 2646360 РФ, МПК G01S 5/12. Способ определения координат источника радиоизлучения в трехмерном пространстве / Ю.Н. Гайчук и др. (РФ); Гайчук Юрий Николаевич (РФ). - №2017110185; Заявлено 27.03.2017; Опубл. 01.02.2018, Бюл. 4. - 17 с.: 8 ил). Основой способа является измерение расстояний от летательного аппарата до не менее, чем 4 станций с известными координатами, размещаемых в разных точках трехмерного пространства. Данный способ не позволяет определить координаты летательного аппарата (с учетом высоты) при расположении станций с известными координатами на равнинной поверхности.
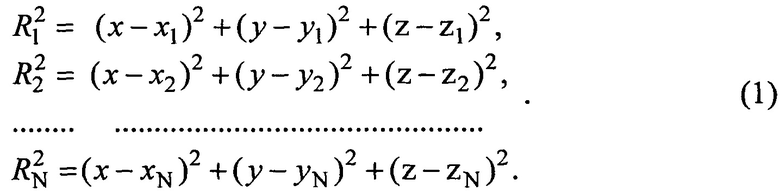
Координаты летательного аппарата определяются из системы нелинейных уравнений, связывающих искомые координаты х, y и z с расстояниями Rn, n=1, 2, …, N от искомого объекта до станций с известными координатами xn, yn, zn, n=1, 2, …, N
Обычно для решения системы нелинейных уравнений (1) используют итерационную процедуру, базирующуюся на разложении нелинейных уравнений в ряд Тейлора и отбрасывании нелинейных членов [1, 2]. Но эта процедура требует знания начального приближения, и полученное решение чувствительно к неточности в его выборе. В [3] предложены прямые, неитерационные методы, базирующиеся на тождественных преобразованиях системы нелинейных уравнений в систему линейных уравнений.
Способ расчета трехмерных координат летательного аппарата дальномерным методом станциями с известными координатами, расположенными на равнинной местности, из всех доступных источников открытой публикации не найден.
Целью предлагаемого способа является измерение координат летательного аппарата при расположении станций (не менее трех) с известными координатами на равнинной местности.
Поставленная задача решается способом, использующим систему нелинейных уравнений, связывающих искомые координаты х, y и высоту h с расстояниями Rn, n=1, 2, …, N от искомого объекта до станций с известными координатами xn, yn, n=1, 2, …, N, расположенных на равнинной местности осуществляется следующим путем
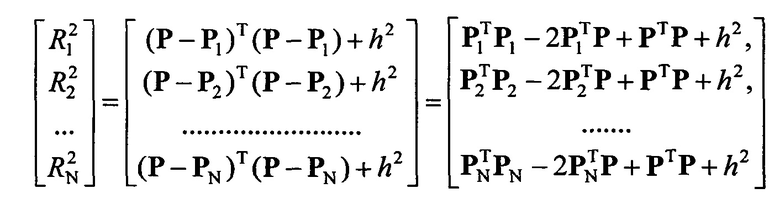
- используется система уравнений
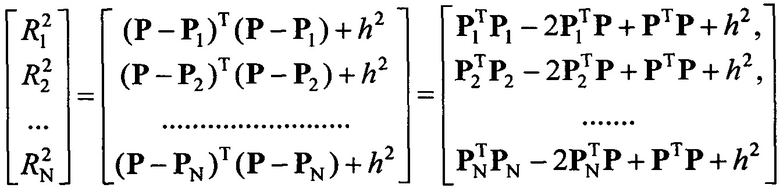
в которой положение n-й станции задается вектором столбцом Pn=[xn, yn]T с координатами xn, yn, n=1, 2, …, N (N≥3), пространственное положение летательного аппарата определяется вектором Р=[х, y]T с координатами х, y и высотой h;
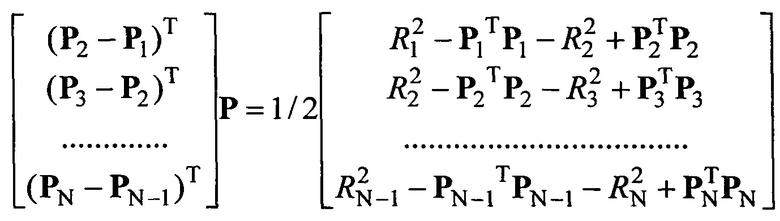
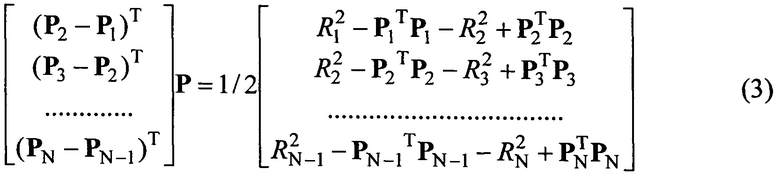
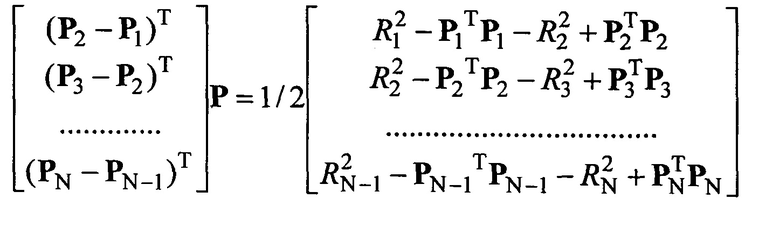
- путем взаимного вычитания соседних строк, исключающего неизвестный квадрат высоты h2, осуществляется переход от системы уравнений с трехмерными координатами к системе с двумерными координатами
или
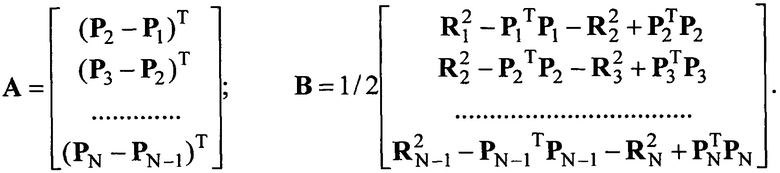
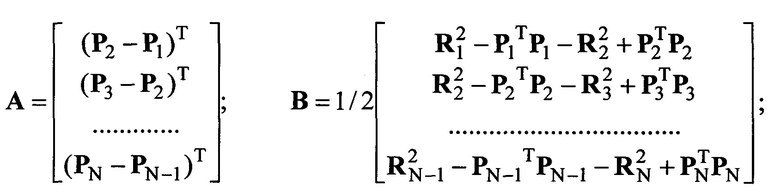
АР=В,
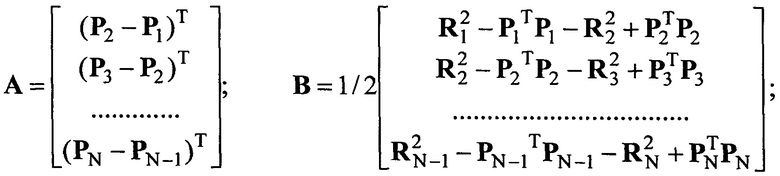
где
- из системы уравнений с двумерными координатами определяется вектор Р=[ATA]-1ATB с искомыми координатами х и y летательного аппарата;
- находится его высота 
Способ расчета трехмерных координат летательного аппарата дальномерным методом станциями с известными координатами на равнинной местности реализуется переходом от системы уравнений с трехмерными координатами к системе с двумерными координатами.
Положение n-й станции задается вектором столбцом Pn=[xn, yn]T с известными координатами xn, yn (n=1, 2, …, N). Пространственное положение летательного аппарата зададим вектором координат Р=[х, y]T и высотой h (искомой). Расстояния от летательного аппарата до станций обозначим Rn (n=1, 2, …, N). Составим систему уравнений, связывающую между собой векторы координат и расстояния от них до станций с известными координатами
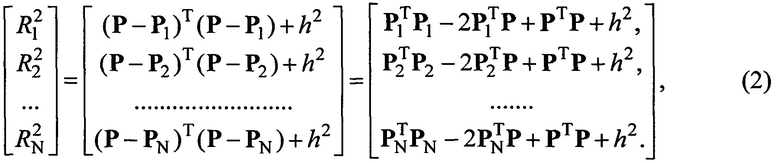
в которой положение n-й станции задается вектором столбцом Pn=[xn, yn]T с координатами xn, yn, n=1, 2, …, N, пространственное положение летательного аппарата определяется вектором Р=[x, y]T с координатами x, y и высотой h.
Путем взаимного вычитания соседних строк, исключающего неизвестный квадрат высоты h2, осуществляется переход от системы с трехмерными координатами к системе двумерными координатами
или

где
Система (3а) содержит вектор Р с двумя неизвестными координатами х и y. То есть предложенный способ позволяет перейти от трехмерной системы координат к двухмерной и найти координаты х и y летательного аппарата с помощью станций с известными координатами, расположенными на равнинной местности. При этом для определения этих координат достаточно трех станций с известными координатами. Открытым пока остается вопрос с высотой объекта, который решим позднее.
Решение системы уравнений (3а) относительно вектора Р найдем следующим образом. Умножив обе части этого уравнения на вектор AT, получим
ATAP=ATB.
Отсюда определяется вектор

Решение (4) представляет собой вектор Р с координатами х и y летательного аппарата, определенный по измеренным расстояниям от него до станций с известными координатами. С помощью предложенного способа для расчета координат летательного аппарата достаточно иметь три станции с известными координатами, не расположенными на одной линии, поскольку решается двумерная задача.
Определяем высоту летательного аппарата, подставив вычисленные координаты х и y в любое из уравнений системы (2). Однако, при наличии погрешностей в измерениях, более справедливой будет оценка

Таким образом, в ситуации расположения станций с известными координатами на равнинной местности, предложенный способ позволяет рассчитать координаты летательного аппарата. При этом с помощью предложенного способа для расчета координат летательного аппарата достаточно иметь три станции с известными координатами. Если в наличии будет более трех станций, предложенный способ позволяет повысить точность расчета координат.
Для расчета координат использован прямой (нерекурсивный) метод расчета, базирующийся на тождественных преобразованиях системы нелинейных уравнений в систему линейных уравнений.
Литература
1. Шебшаевич B.C.. Дмитриев П.П., Иванцевич И.В. и др. Сетевые спутниковые радионавигационные системы / под ред. B.C. Шебшаевича. 2-е изд. М.: Радио и связь. 1993. 408 с.
2. Кононыхина Н.А.. Федоров Ю.П. Эффективный алгоритм и профамма определения местонахождения объектов для системы многопозиционной радионавигации // Теория и техника радиосвязи. 1997. Вып. 1. С. 61-73.
3. Маркин В.Г. Дальномерные методы определения координат наземных объектов // Радиотехника. 2017. №6. С. 228-234/
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат воздушной цели в многопозиционной наземной системе наблюдения Радиопередатчики-воздушная цель-приемник | 2019 |
|
RU2734690C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОТЕХНИЧЕСКОГО ОБЪЕКТА | 2020 |
|
RU2737533C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОТЕХНИЧЕСКОГО ОБЪЕКТА | 2020 |
|
RU2737532C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2020 |
|
RU2732192C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2020 |
|
RU2738641C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ АВИАЦИОННО-КОСМИЧЕСКИХ ОБЪЕКТОВ, НАБЛЮДАЕМЫХ ГРУППИРОВКОЙ СТАНЦИЙ СЛЕЖЕНИЯ | 2004 |
|
RU2279105C2 |
| Способ определения угловой ориентации летательного аппарата | 2024 |
|
RU2821640C1 |
| УСТРОЙСТВО ЛОКАЦИИ И НАВИГАЦИИ | 2012 |
|
RU2525228C2 |
Изобретение относится к области радиотехники, навигации и может быть использовано для определения трехмерных координат летательного аппарата дальномерным методом при расположении станций с известными координатами на равнинной местности. Достигаемый технический результат – повышение точности определения координат летательного аппарата. Указанный результат достигается за счет того, что используют систему нелинейных уравнений, связывающих искомые координаты х, y и высоту h с расстояниями Rn, n=1, 2, …, N, от летательного аппарата до станций с известными координатами xn, yn, n=1, 2, …, N, в используемой системе нелинейных уравнений положение n-й станции задается вектором-столбцом Pn=[xn, yn]Т с координатами xn, yn, n=1, 2, …, N (N≥3), пространственное положение летательного аппарата определяется вектором P=[x, y]T с координатами х, y и высотой h, затем осуществляют переход от системы уравнений с трехмерными координатами к системе с двумерными координатами, из системы уравнений с двумерными координатами определяется высота летательного аппарата.
Способ определения трехмерных координат летательного аппарата, основанный на измерении расстояний между летательным аппаратом и станциями с известными координатами, расположенными на равнинной местности, использующий систему нелинейных уравнений, связывающих искомые координаты х, у и высоту h с измеряемыми расстояниями Rn, n=1, 2, …, N, от летательного аппарата до станций с известными координатами xn, yn, n=1, 2, …, N, расположенных на равнинной местности, осуществляющий:
- использование системы уравнений
 ,
,
в которой положение n-й станции задается вектором-столбцом  с координатами xn, yn, n=1, 2, ..., N (N≥3), пространственное положение летательного аппарата оценивается вектором
с координатами xn, yn, n=1, 2, ..., N (N≥3), пространственное положение летательного аппарата оценивается вектором  с координатами х, у и высотой h;
с координатами х, у и высотой h;
- переход от системы уравнений с трехмерными координатами к системе с двумерными координатами путем взаимного вычитания соседних строк, исключающего неизвестный квадрат высоты h2,
или
АР=В,
где
- определение вектора  с искомыми координатами х и у летательного аппарата;
с искомыми координатами х и у летательного аппарата;
- определение его высоты .
.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2017 |
|
RU2643360C1 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ, ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2547158C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1984 |
|
SU1840490A1 |
| УСТРОЙСТВО И СПОСОБ ТРЕХМЕРНОГО ПОЗИЦИОНИРОВАНИЯ | 2011 |
|
RU2510046C2 |
| US 7409293 B2, 05.08.2008 | |||
| US 6094607 A, 25.07.2000. | |||

