Устройство относится к области радионавигации и может быть использовано в бортовой аппаратуре спутниковых навигационных систем второго поколения.
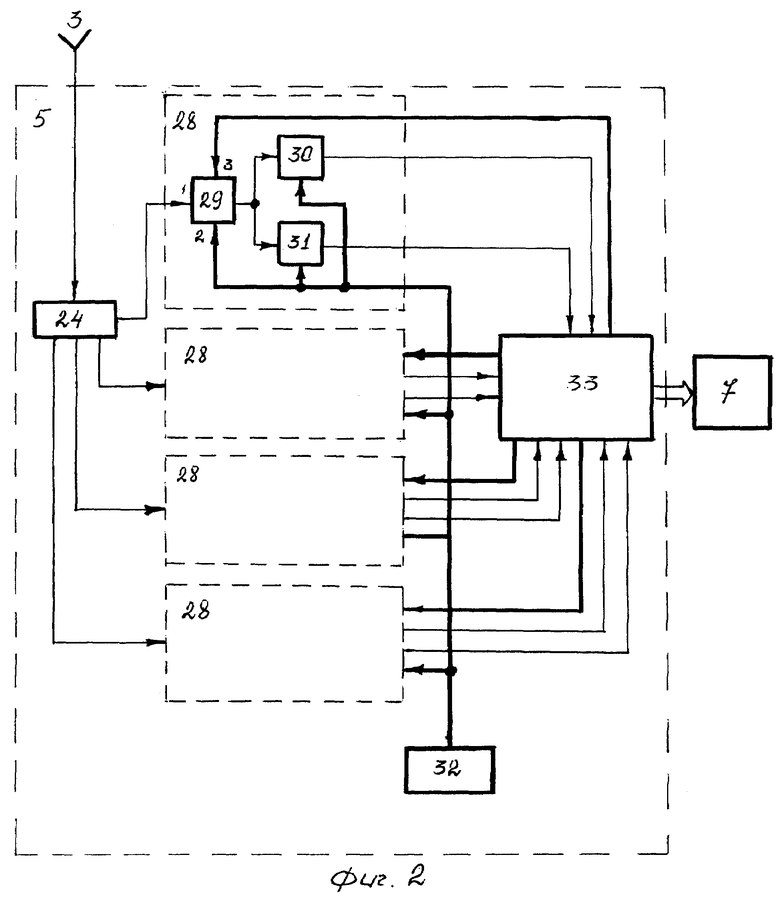
Известна самолетная аппаратура потребителей американской спутниковой радионавигационной системы ″Navstar″ (Navigation, 1978, V.25. №2. р.193), состоящая из слабонаправленной антенны, ориентированной в верхнюю полусферу, навигационной аппаратуры потребителей и индикатора текущих координат (фиг.2).
Однако точность местоопределения, обеспечиваемая с помощью этой аппаратуры, недостаточна при заходе на посадку над местностью, непривязанной с должной точностью к центру масс Земли, так же как и для полета по непривязанным трассам.
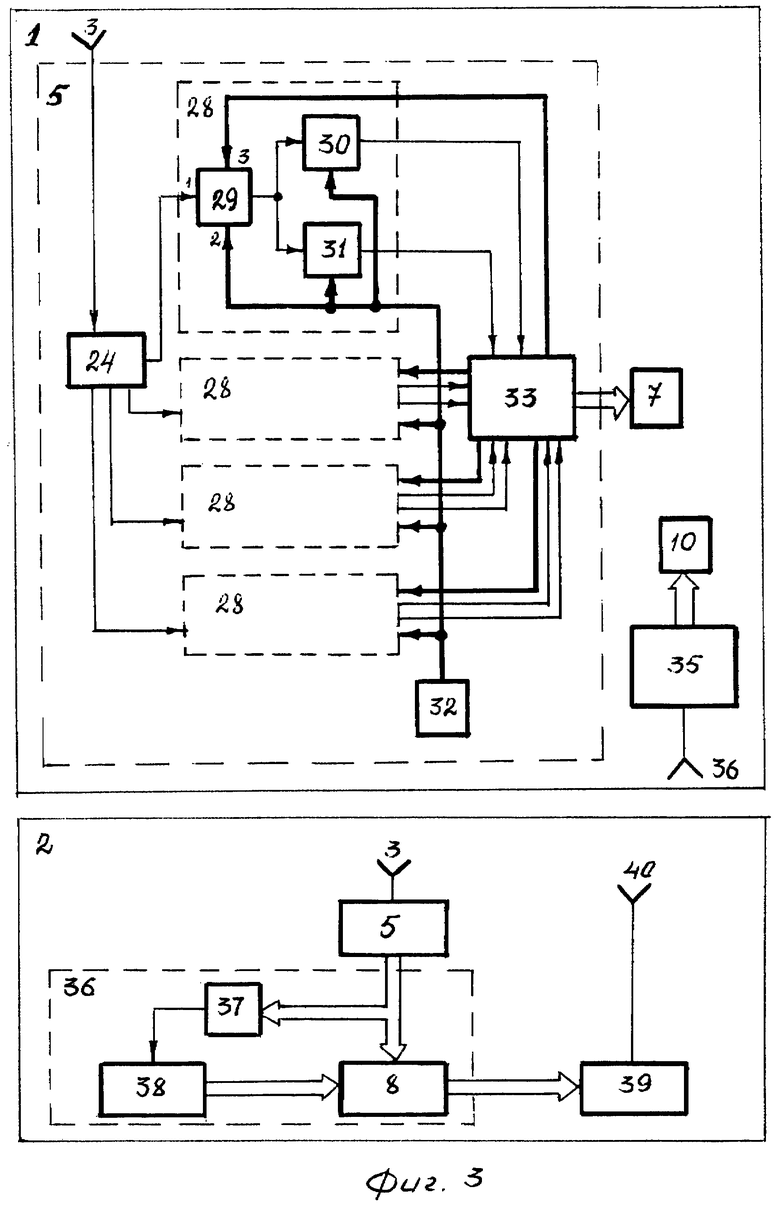
Известна аппаратура, основанная на дифференциальном методе навигационных определений, принятая за прототип (PLANS′80 S.P.Teasley ″Differential GPS Navigation″, pp.9-16).
Функциональная схема представлена на фиг.3.
Она включает в себя бортовую аппаратуру и наземную контрольной станции.
Бортовая аппаратура состоит из последовательно соединенной слабонаправленной антенны, ориентированной в верхнюю полусферу, навигационной аппаратуры потребителей и индикатора текущих координат, а также из последовательно соединенных слабонаправленной антенны, ориентированной в нижнюю полусферу, радиоприемника и индикатора дифференциальных поправок.
Навигационная аппаратура потребителей в свою очередь состоит из приемника, четырех каналов обработки, каждый из которых состоит из блока поиска и слежения, демодулятора эфемеридной и служебной информации, измерителя разности времени, бортовой цифровой вычислительной машины, эталона частоты и времени.
На наземной контрольной станции устанавливается аппаратура определения дифференциальных поправок, состоящая из блока определения дифференциальных поправок, антенн и навигационной аппаратуры потребителей, а также передатчик, соединенный с антенной.
Недостатки этого устройства следующие.
1. Недостаточная точность определения местоположения, обусловленная значительной систематической погрешностью (˜2 м), вносимой в измеряемые координаты неидентичностью измерительных трактов на борту летательного аппарата и на наземной контрольной станции, так как аппаратурная погрешность каждого отдельного измерительного тракта может составлять 1,5 м.
2. Вероятна возможность несанкционированного использования высокоточной информации и данных о точности геодезической привязки наземных пунктов по сигналам, излучаемым контрольной станцией и содержащим дифференциальные поправки.
Целью изобретения является повышение точности определения местоположения летательного аппарата и исключение несанкционированного доступа к высокоточной информации.
Для достижения этой цели в устройство для определения местоположения летательного аппарата, содержащее бортовую аппаратуру, в состав которой входят последовательно соединенные антенна, ориентированная в верхнюю полусферу, антенный переключатель, навигационная аппаратура потребителей, а также индикатор текущих координат, антенна, ориентированная в нижнюю полусферу и подключенная ко второму входу антенного переключателя, индикатор дифференциальных поправок, а также наземную аппаратуру контрольных станций, дополнительно введены в бортовую аппаратуру последовательно соединенные переключатель, блок вычитания и первый блок памяти, последовательно соединенные дешифратор, элемент ИЛИ и синхронизатор, а также дифференцирующая цепь, элемент задержки и второй блок памяти, при этом выход навигационной аппаратуры потребителей соединен с информационными входами дешифратора и переключателя, первый информационный выход переключателя соединен с входом индикатора текущих координат, вход индикатора дифференциальных поправок соединен с выходом первого блока памяти, второй информационный вход блока вычитания соединен с выходом второго блока памяти, сигнальные входы которого соединены с сигнальными выходами дешифратора, входы синхронизации первого и второго блоков памяти и блока вычитания подключены к выходу элемента задержки, вход которого объединен с управляющими входами переключателей и с входом дифференцирующей цепи и подключен к выходу синхронизатора, выход дифференцирующей цепи соединен с входом обнуления первого блока памяти, кроме того, наземная аппаратура контрольных станций выполнена в виде последовательно соединенных приемной антенны, приемника, блока задержки, передатчика и передающей антенны.
На фиг.1 приведена структурная схема устройства для определения местоположения летательного аппарата.
Устройство состоит из бортовой аппаратуры потребителей 1 и наземной аппаратуры 2, установленной на контрольной станции.
Бортовая аппаратура потребителей 1 состоит из приемной антенны 3, ориентированной в верхнюю полусферу, подключенной к первому сигнальному входу антенного переключателя 4, выход которого подключен к входу навигационной аппаратуры потребителей 5, информационный выход навигационной аппаратуры потребителей 5 соединен с входом переключателя 6, первый выход которого соединен с индикатором текущих координат 7, второй выход соединен с первым информационным входом блока вычитания 8, выход которого соединен с информационным входом первого блока памяти 9, выход которого соединен с индикатором дифференциальных поправок 10, а также дешифратора 11, вход которого также подсоединен к информационному выходу навигационной аппаратуры потребителей 3, а выходы соединены со входами элемента ИЛИ 12, выход которого соединен со входом синхронизатора 13, при этом вход синхронизатора 13 является входом дифференцирующей цепи 14, выход которой подключен к первому входу элемента ИЛИ 15, выход которого подсоединен ко входу генератора импульсов заданной длительности 16, выход которого является выходом синхронизатора 13, кроме того, выход генератора 16 соединен через элемент задержки 17 с входом элемента И 18, другой вход которого соединен с входом дифференцирующей цепи 14, кроме того, в состав синхронизатора 13 входит вторая дифференцирующая цепь 19, подсоединенная к выходу элемента И 18, при этом ее выход соединен со вторым входом элемента ИЛИ 15. Кроме того, бортовая аппаратура потребителей 1 включает дифференцирующую цепь 20, элемент задержки 21, второй блок памяти 22 и приемную антенну 23, ориентированную в нижнюю полусферу, при этом выход синхронизатора 13 соединен с управляющими входами переключателей 4 и 6 и через дифференцирующую цепь 20 со входом обнуления блока памяти 9, а через элемент задержки 21 со входами синхронизации блока вычитания 8 и блоков памяти 9 и 22, сигнальные входы последнего соединены с выходами дешифратора 11, выход - со вторым информационным входом блока вычитания 9, а выход антенны 23 соединен с вторым сигнальным входом переключателя 4, наземная аппаратура 2 представляет собой ретранслятор сигналов навигационных искусственных спутников Земли и состоит из слабонаправленной приемной антенны 3, ориентированной в верхнюю полусферу, подключенной ко входу приемника 24, выход которого через блок задержки 25 соединен со входом усилителя сигналов 26, и передающей антенны 27, ориентированной в верхнюю полусферу.
Предлагаемое устройство функционирует следующим образом.
Излучаемые навигационным искусственным спутником Земли сигналы принимаются на борту летательного аппарата приемной антенной 3, которая через нормально замкнутые контакты переключателя 4 подсоединена ко входу навигационной антенны потребителя 5, при этом сигналы всех искусственных спутников находящихся в зоне видимости летательного аппарата поступают на вход приемника 24, бортовая вычислительная машина на основании априорных данных определяет наиболее информативные из них для проведения навигационных определений и дает сигнал в каналы обработки для поиска и слежения за требуемыми сигналами с помощью блоков поиска и слежения за сигналом, затем производится с помощью измерителя разности времени определений момента прихода сигнала относительно бортовой шкалы времени, формируемой эталоном частоты и времени.
Демодулятор эфемеридной и служебной информации расшифровывает данные о моменте излучения сигнала, положении навигационного искусственного спутника Земли в этот момент и его векторе скорости.
Полученные данные поступают в вычислительную машину для вычисления координат места летательного аппарата. Вычисленные значения координат выдаются с выхода 5 на входы индикатора текущих координат 7 (через нормально замкнутые контакты переключателя 6) и дешифратора 11. В дешифраторе 11 полученные измеренные значения координат идентифицируются с координатами рабочей зоны той контрольной станции, в зоне действия которой находится летательный аппарат. Точные значения координат всех функционирующих контрольных станции хранятся в блоке памяти 22. После определения номера контрольной станции на соответствующем выходе дешифратора 11 появляется сигнал, который поступает на соответствующую ячейку блока памяти 22, в которой хранятся точные значения координат данной контрольной станции. Одновременно сигнал с выхода дешифратора 11 подается через элемент ИЛИ 12 на вход синхронизатора 13, при этом по переднему фронту сигнала дифференцирующей цепью 14 формируется импульс, который через элемент ИЛИ 15 поступает на генератор импульсов заданной длительности 16. При подаче импульса на вход генератора 16, он формирует импульс, длительность которого равна времени определения дифференциальной поправки на борту летательного аппарата. Импульс с выхода генератора 16 через элемент задержки 17, элемент И 18 (при наличии на другом его входе сигнала с выхода элемента ИЛИ 12), и дифференцирующую цепь 19 подается на второй вход элемента ИЛИ 15 и запускает генератор 16. Таким образом, на выходе генератора 16, который является выходом синхронизатора 13, формируется последовательность импульсов, длительность которых определяет время определения дифференциальных поправок, а интервал времени между импульсами (задаваемый временем задержки элемента задержки 17) определяет время работы навигационной аппаратуры потребителя 5 в штатном режиме. Последовательность импульсов с выхода синхронизатора 13 по управляющим цепям подается на входы переключателей 4 и 6 через дифференцирующую цепь 20 на вход обнуления блока памяти 9, а через элемент задержки 21 на входы синхронизации блока памяти 22, вычитателя 8 и блока памяти 9.
При этом происходит переключение контактов переключателей 4 и 6 на время действия импульса, в результате чего антенна 3 отключается от входа навигационной аппаратуры потребителя 5, а антенна 23 подключается ко входу 5, информационный выход навигационной аппаратуры потребителей 5 переключается на вход вычитателя 8, а сформированный дифференцирующей цепью 20 импульс обнуляет содержимое блока памяти 9. Кроме того, по импульсу с выхода синхронизатора 13, сдвинутому элементом задержки 21 на время, необходимое для обработки сигналов в навигационной аппаратуре потребителя, 5 осуществляется выдача точных координат контрольной станции, хранящихся в блоке памяти 22, в вычитатель 8, который включается этим же задержанным сигналом, и происходит запись результата, полученного в вычитателе 8, в блок памяти 9.
Одновременно с приемом сигналов навигационного искусственного спутника Земли на борту летательного аппарата осуществляется прием сигналов на антенну 3 контрольной станции, выход которой соединен со входом наземного приемника 24, с выхода которого сигналы поступают на вход элемента задержки 25, который осуществляет задержку сигналов на время, равное времени обработки сигнала в бортовой навигационной аппаратуре потребителя 5. Задержанные таким образом сигналы с выхода элемента задержки 25 поступают на вход усилителя сигналов 26, где усиливаются и поступают затем в антенну 27. Сигналы, излучаемые контрольной станцией, принимаются антенной 23, через переключатель 4 поступают в аппаратуру 5, где по результатам измерений принятых сигналов решается навигационная задача определения координат контрольной станции. Результаты вычислений с выхода аппаратуры 5 выдаются на первый вход вычитателя 8, где сравниваются с точными значениями координат станций, которые поступают с блока памяти 22, результат сравнения в виде дифференциальной поправки выдается на первый вход блока памяти 9, а с выхода блока памяти 9 поступает на индикатор дифференциальных поправок 10. По окончании действия импульса с выхода синхронизатора 13 переключатели 4 и 6 возвращаются в исходное положение, при этом антенна 23 отключается, а антенна 3 подключается ко входу аппаратуры 5, переключается информационный выход аппаратуры 5 с вычитателя 8 на индикатор текущих координат 7, с задержкой, определяемой элементом задержки 21, отключается вычитатель 8 и блок памяти 22. С этого момента бортовая аппаратура 5 снова принимает сигналы искусственного спутника Земли и решает навигационную задачу определения своих координат (т.е. работает в штатном режиме), текущие значения координат летательного аппарата высвечиваются на индикаторе текущих координат 7. Периодичность переключения из штатной работы в режим определения дифференциальной поправки определяется временем, в течение которого значение этой поправки остается справедливым.
При срабатывании реле времени, которое является элементом задержки 17 в схеме синхронизатора 13 и определяет время работы аппаратуры 5 в штатном режиме, осуществляется запуск генератора 16, на выходе которого формируется следующий импульс, по которому снова повторяется весь цикл работы описываемого устройства. Работа устройства в режиме с периодическим определением дифференциальных поправок будет осуществляться в течение времени нахождения летательного аппарата в зоне действия данной станции летательного аппарата. При выходе из зоны действия контрольной станции бортовая аппаратура потребителя 5 работает только в штатном режиме, так как сигнал на выходе дешифратора 11 отсутствует и, следовательно, не работает генератор синхронизатора 13. При вхождении летательного аппарата в зону действия следующей контрольной станции весь цикл работы устройства с периодическим определением дифференциальных поправок повторяется. Оператор, имея перед собой текущие значения координат и дифференциальную поправку измерений, может оперативно корректировать данные местоположения летательного аппарата. В предлагаемом устройстве определение координат контрольной станции происходит с помощью бортовой навигационной аппаратуры потребителя, которая используется при определении собственных координат летательного аппарата, в результате чего погрешность местоопределения за счет неидентичности измерительных каналов исключается. Таким образом, предлагаемое устройство позволяет повысить точность навигационных определений в 2 раза.
Кроме того, предлагаемое устройство исключает возможность несанкционированного доступа к высокочастотной навигационной информации за счет использования на станции ретранслятора сигналов искусственного спутника Земли, т.к. при этом излучаемый им сигнал не несет дополнительной информации и, следовательно, не может быть использован для получения информации о геодезической привязке наземный пунктов.
Таким образом, использование изобретения обеспечивает высокоточное решение навигационной задачи на борту ЛА с учетом дифференциальных поправок и гарантирует систему от несанкционированного использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК К ИЗМЕРЯЕМЫМ КООРДИНАТАМ ПОДВИЖНОГО ОБЪЕКТА | 1986 |
|
SU1840575A1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2007 |
|
RU2331901C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2008 |
|
RU2371737C1 |
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
Изобретение относится к области радионавигации и может быть использовано в бортовой аппаратуре спутниковых навигационных систем. Техническим результатом является повышение точности определения местоположения летательного аппарата за счет исключения систематической погрешности измерения радионавигационных параметров, обусловленных неидентичностью измерительных трактов. Устройство содержит бортовую аппаратуру и наземную аппаратуру контрольных станций. Бортовая аппаратура содержит последовательно соединенные антенну, антенный переключатель, навигационную аппаратуру потребителей, индикатор текущих координат и индикатор дифференциальных поправок. Выход навигационной аппаратуры потребителей соединен с информационными входами дешифратора и переключателя, первый информационный вход которого соединен с входом индикатора текущих координат. Вход индикатора дифференциальных поправок соединен с выходом первого блока памяти, второй информационный вход блока вычитания соединен с выходом второго блока памяти, сигнальные входы которого соединены с сигнальными выходами дешифратора. Входы синхронизации первого и второго блоков памяти и блока вычитания подключены к выходу элемента задержки, вход которого объединен с управляющими входами переключателей и с входом дифференцирующей цепи и подключен к выходу синхронизатора. Выход дифференцирующей цепи соединен с входом обнуления первого блока памяти. Наземная аппаратура контрольных станций выполнена в виде последовательно соединенных приемной антенны, приемника, блока задержки, передатчика и передающей антенны. 1 з.п. ф-лы, 3 ил.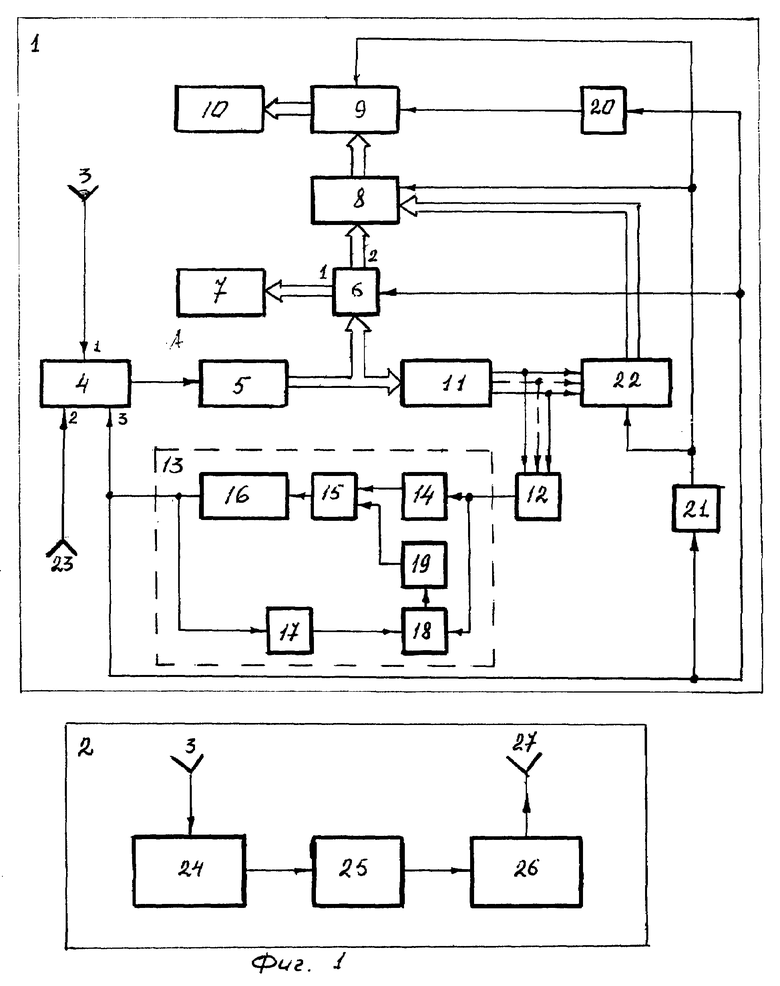
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Navigation, 1978, v.25, №2, p.193. | |||

