Изобретение относится к области радиотехники, навигации и может быть использовано для расчета трехмерных координат воздушной цели дальномерным методом при расположении радиопередатчиков навигационных сигналов и приемника с известными координатами на равнинной местности.
Известен способ нахождения трехмерных координат целей [1], который может быть реализован в многопозиционных радиолокационных станциях и системах для формирования вектора состояния целей, дающий наибольшую точность при многократном повторении, последовательно приближаясь к истинному положению цели. Недостатком указанного способа является большой объем вычислений, связанный с многократным использованием последовательных приближений к истинному положению цели, что может привести к возникновению погрешностей в оценке координат.
Известен способ определения координат источника радиоизлучения в трехмерном пространстве [2]. Основой способа является измерение расстояний от источника радиоизлучения до не менее, чем 4 станций с известными координатами, размещаемых в разных точках трехмерного пространства. Данный способ не позволяет определить координаты источника (с учетом высоты) при расположении станций с известными координатами на равнинной поверхности.
Наиболее близким по технической сущности к заявляемому способу является способ [3]. Согласно этому способу определение местоположения воздушной цели осуществляется с помощью N наземных моностатических радиолокационных станций с известными координатами xn, yn, zn, n=1, 2, … ,N, которые излучают навигационные сигналы и принимают сигналы, отраженные от воздушной цели, измеряют расстояния Rn, n=1, 2, …, N до воздушной цели. С использованием измеренных расстояний формируется система нелинейных уравнений, позволяющая определить координаты воздушной цели.
Недостатками этого способа являются потребности в:
- наличии центра сбора измеряемых расстояний и расчета координат,
- организации дополнительных каналов связи между станциями с известными координатами и центром сбора измеряемых расстояний.
Целью изобретения является устранение указанных недостатков и изыскание последовательности операций, обеспечивающих определение координат воздушной цели по результатам измерений расстояний.
Технический результат достигается применением многопозиционной наземной системы наблюдения Радиопередатчики-воздушная цель-приемник, содержащей N радиопередатчиков навигационных сигналов при N≥4, воздушную цель и приемник, синхронизированный с радиопередатчиками, принимающий отраженные от воздушной цели сигналы, оценивающий расстояния Радиопередатчики-воздушная цель-приемник и определяющий координаты воздушной цели х, у и расстояния r0 между целью и приемником
где 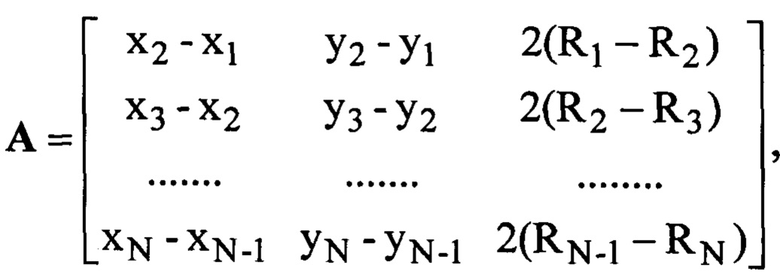
Rn - расстояние вдоль пути распространения n-й радиопередатчик - воздушная цель - приемник; xn, yn, n=1, 2, …, N - координаты радиопередатчиков
при количестве радиопередатчиков N=4 координаты х, у и расстояние r0 определяются в виде
где А-1 - обратная матрица.
при количестве радиопередатчиков N>4 координаты х, у и расстояние r0 определяются в виде
где  - псевдообратная матрица,
- псевдообратная матрица,  - индекс транспонирования.
- индекс транспонирования.
Координата z воздушной цели определяется в виде

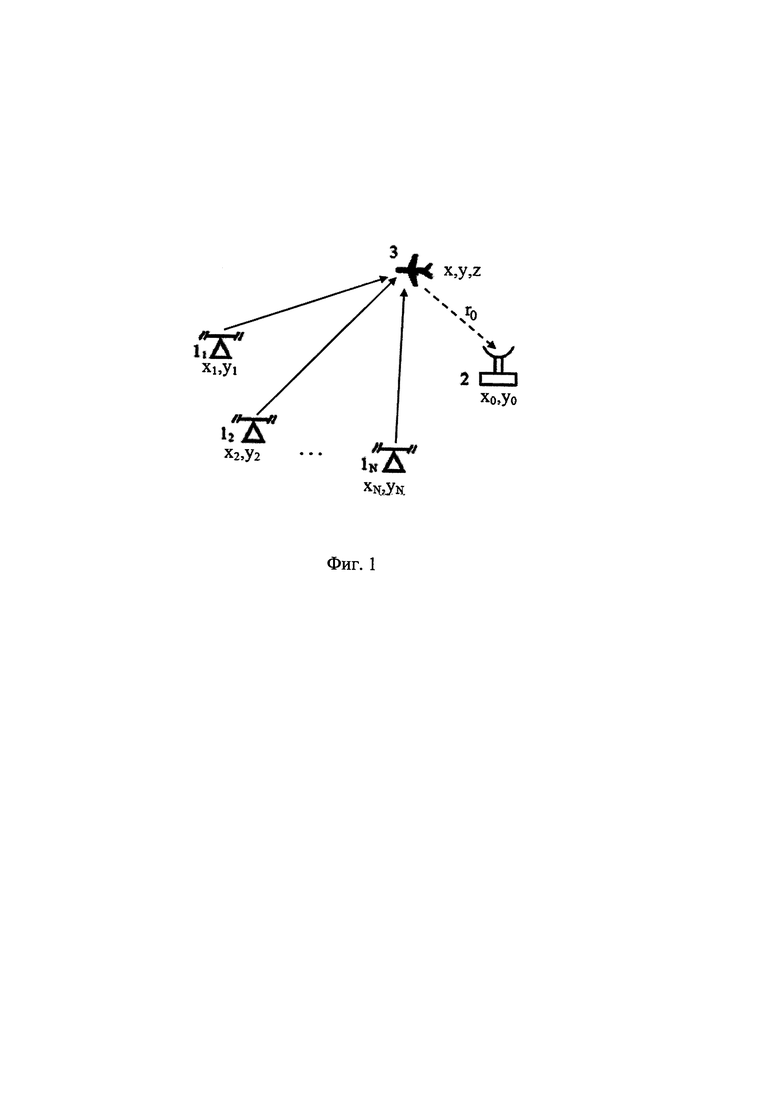
На Фиг. 1 приведена функциональная схема многопозиционной наземной системы наблюдения. Она содержит расположенные на равнинной местности N радиопередатчиков 11, 12, …, 1N, приемник 2, синхронизированный с радиопередатчиками 11, 12, …, 1N, и воздушную цель 3 с искомыми координатами х, у, z.
Способ определения координат воздушной цели 3 состоит в следующем.
Радиопередатчики 11, 12, …, 1N, излучают радионавигационные сигналы, приемник 2, синхронизированный с радиопередатчиками 11, 12, …, 1N, принимает сигналы, отраженные от воздушной цели 3, определяет расстояния вдоль траектории Радиопередатчики-воздушная цель-приемник и рассчитывает координаты воздушной цели 3. Координаты воздушной цели 3 определяются из системы уравнений, связывающих расстояния R1, R2, …, RN Радиопередатчики-воздушная цель-приемник с искомыми координатами х, у и z воздушной цели 3, известными координатами xn, yn, 0, n=1, 2, …, N радиопередатчиков 11, 12, …, 1 и координатами х0, y0, 0 приемника 2
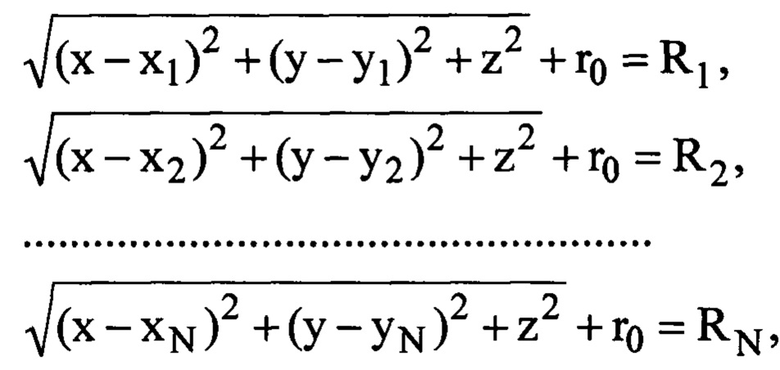
где  - расстояние Воздушная цель-приемник.
- расстояние Воздушная цель-приемник.
После избавления от квадратных корней эта система принимает вид
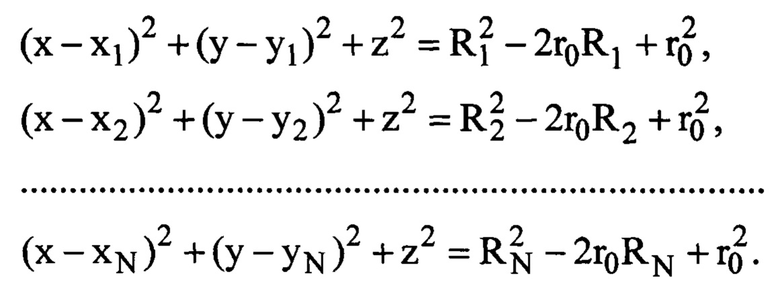
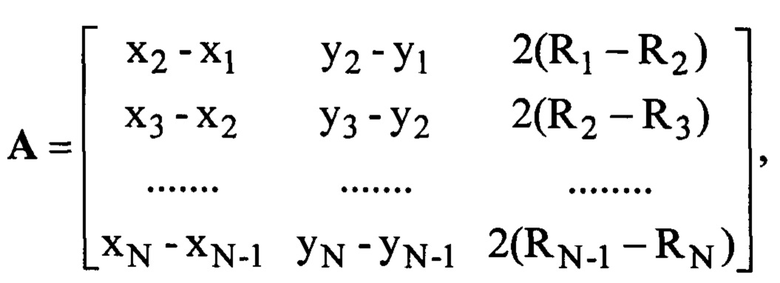
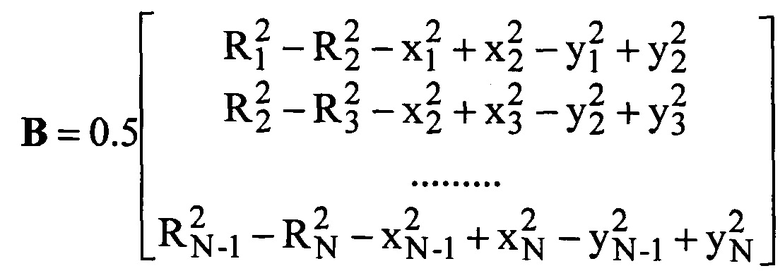
Эта система является нелинейной. Она содержит искомые координаты х, у, z, а также неизвестное расстояние r0 в степени два. Проводится линеаризация этой системы. Вычитая из каждого i-го уравнения уравнение с номером i+1 (i=1, …, N-1) и приводя подобные члены, получается система из N-1 линейных уравнений относительно координат х, у и расстояния r0

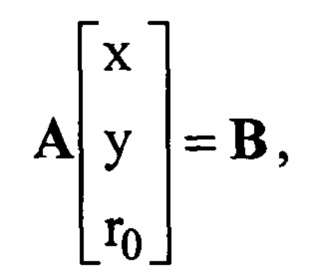
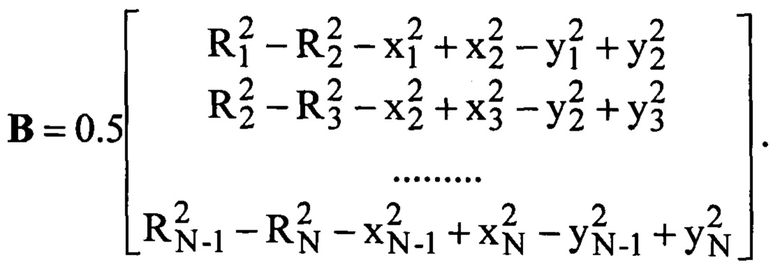
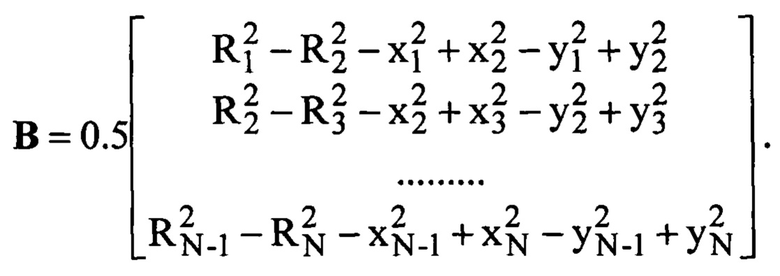
Матричная форма этих уравнений имеет вид
где
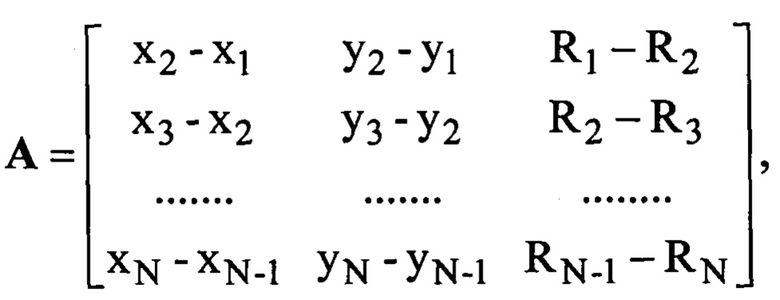
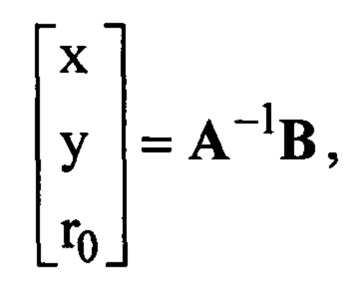
При количестве передатчиков N=4 матрица А имеет размер 3×3, а координаты воздушной цели 3 х, у и расстояние r0 определяются в виде
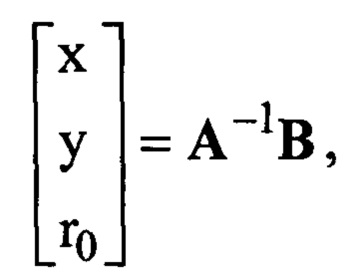
где А-1 - обратная матрица.
При количестве передатчиков N>4 матрица А - прямоугольная размером (N-1)×3. В этом случае координаты воздушной цели 3 х, у и расстояние r0 определяются в виде
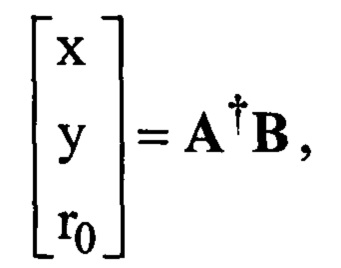
где  - псевдообратная матрица,
- псевдообратная матрица,  - индекс транспонирования.
- индекс транспонирования.
Координата z воздушной цели 3 определяется из равенства

Откуда 
Таким образом, предложенный способ позволяет определить пространственные координаты воздушной цели в многопозиционной наземной системе наблюдения Радиопередатчики-воздушная цель-приемник путем прямого решения системы уравнений, связывающей искомые координаты с расстояниями вдоль путей распространения Радиопередатчики-воздушная цель - приемник.
При этом измерения всех расстояний Радиопередатчики-воздушная цель-приемник и расчет координат цели осуществляются в одном приемнике, что не требует организации дополнительных каналов связи и дополнительного центра сбора и обработки измерительной информации.
В подтверждении работоспособности способа ниже приведен пример расчета неизвестных координат воздушной цели 3 с применением предлагаемого способа.
Исходные данные для расчета:
Координаты воздушной цели:
х=3000 м, у=3500 м, z=450 м.
Координаты приемника:
х0=3000 м, у0=3500 м.
Координаты передатчиков:
x1=1000 м, у1=1000 м;
х2=2000 м, у2=1500 м;
х3=1000 м, у3=2500 м;
x4=2000 м, у4=3000 м;
х5=2300 м, у5=3200 м;
x6=1300 м, у6=2700 м.
Измеренные расстояния:
R1=3683 м;
R2=2730,9 м;
R3=2730,9 м;
R4=1655,2 м;
R5=l334,6 м;
R6=2382 м.
Результаты расчета
Расчет матрицы А
Расчет вектора В
Расчет матрицы [АТА]-1АТ

Рассчитанные координаты воздушной цели х=3000 м, у=3500 м.
Рассчитанное расстояние r0=450 м.
Рассчитанная координата воздушной цели z=450 м.
Таким образом, рассчитанные координаты воздушной цели 3 совпадают с ее исходными координатами.
Источники информации.
1. А.В. Бычков А.В., Пелипенко И.И. Алгоритм нахождения трехмерных координат целей в многопозиционной радиолокации без пеленгации. Вестник СибГУТИ. 2015. №2. С. 93-98.
2. Патент 2643360 РФ, МПК G01S 5/12. Способ определения координат источника радиоизлучения в трехмерном пространстве / Ю.Н. Гайчук и др. (РФ); Гайчук Юрий Николаевич (РФ). - №2017110185; Заявлено 27.03.2017; Опубл. 01.02.2018, Бюл. 4. - 17 с.: 8 ил.
3. Патент 2686847. Российская Федерация, Способ расчета трехмерных координат летательного аппарата дальномерным методом при расположении станций с известными координатами на равнинной местности/ Маркин В.Г., Шуваев В.А. Красов Е.М., опубл. 0.6.05.2019. Бюл. №13.
Изобретение относится к области радиотехники, навигации и может быть использовано для расчета трехмерных координат воздушной цели дальномерным методом при расположении радиопередатчиков навигационных сигналов и приемника с известными координатами на равнинной местности. Техническим результатом изобретения является обеспечение определения координат воздушной цели по результатам измерений расстояний. В способе применяют многопозиционную наземную систему наблюдений радиопередатчики-воздушная цель-приемник, содержащую N радиопередатчиков навигационных сигналов при N≥4, воздушную цель и приемник, синхронизированный с радиопередатчиками, принимающий отраженные от воздушной цели сигналы, оценивающий расстояния Радиопередатчики-воздушная цель-приемник и определяющий координаты воздушной цели х, у и расстояния r0 между целью и приемником. Измерения всех расстояний радиопередатчики-воздушная цель-приемник и расчет координат цели осуществляются в одном приемнике, что не требует организации дополнительных каналов связи и дополнительного центра сбора и обработки измерительной информации. 1 ил.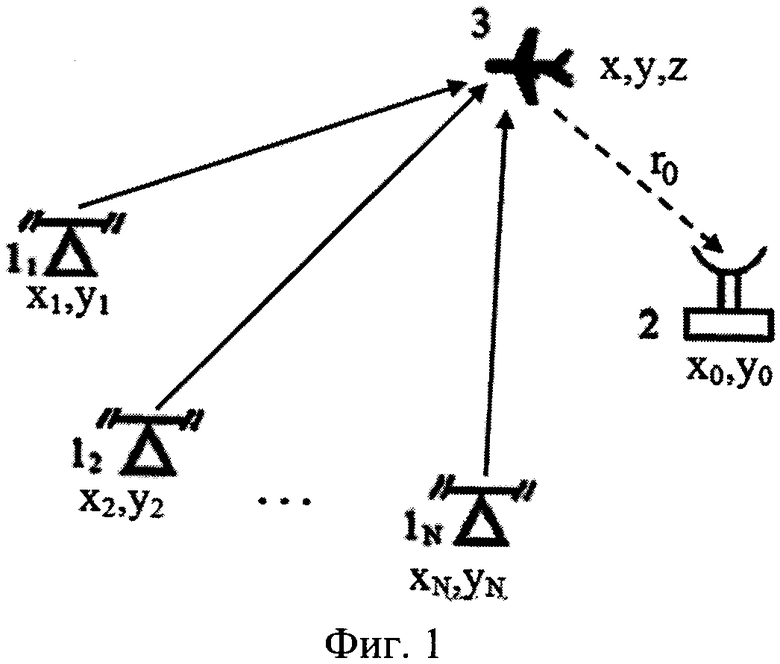
Способ определения координат воздушной цели в многопозиционной наземной системе наблюдения Радиопередатчики-воздушная цель-приемник, содержащей N радиопередатчиков навигационных сигналов при N≥4, воздушную цель и приемник, синхронизированный с радиопередатчиками, принимающий отраженные от воздушной цели сигналы, оценивающий расстояния Радиопередатчики-воздушная цель-приемник и определяющий координаты воздушной цели х, у и расстояния r0 между целью и приемником
где
Rn - расстояние вдоль пути распространения n-й радиопередатчик-воздушная цель-приемник; xn, yn, n=1, 2, …, N - координаты радиопередатчиков,
при количестве радиопередатчиков N=4 координаты х, у и расстояние r0 определяются в виде
где А-1 - обратная матрица,
при количестве радиопередатчиков N>4 координаты х, у и расстояние r0 определяются в виде
где  - псевдообратная матрица,
- псевдообратная матрица,  - индекс транспонирования,
- индекс транспонирования,
при этом координата z воздушной цели определяется в виде

| Способ определения координат воздушных целей в многопозиционной системе наблюдения "навигационные спутники - воздушные цели - приемник" | 2018 |
|
RU2692701C1 |
| Способ расчета трехмерных координат летательного аппарата дальномерным методом при расположении станций с известными координатами на равнинной местности | 2018 |
|
RU2686847C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ НАВИГАЦИОННЫХ ИЗМЕРЕНИЯХ | 2012 |
|
RU2529016C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |
| RU 2018137889 A, 27.04.2020 | |||
| КИРЮШКИН В.В., ЧЕРЕПАНОВ Д.А | |||
| Оценка координат воздушной цели в многопозиционной системе наблюдения "навигационные спутники - воздушная цель - наземный приемник" // Журнал сибирского федерального университета | |||

