Изобретение относится к радиолокационной технике и может быть использовано для пространственной обработки радиотехнических сигналов.
Известно "Устройство пространственной обработки широкополосных сигналов" (патент на изобретение RU №2305854 С1 от 10.09.2007), содержащее кольцевую антенную решетку, блок усилителей, синхронизатор, задающий генератор, коммутатор, антенную решетку, блок приемных усилителей, коммутатор дальности и коммутатор направления, при этом А выходов блока усилителей подключены к А входам кольцевой антенной решетки, первый выход синхронизатора соединен с входом задающего генератора, второй выход синхронизатора соединен с первым входом коммутатора, третий выход синхронизатора соединен с входом коммутатора направления, четвертый выход синхронизатора соединен с входом коммутатора дальности, выход задающего генератора соединен с вторым входом коммутатора, кроме того содержится акустоэлектронный процессор и приемный акустоэлектронный процессор, В входов которого соединены с В выходами коммутатора, а А его выходов соединены с А входами блока усилителей, С выходов приемного акустоэлектронного процессора соединены с соответствующими входами коммутатора направления, a D вторых выходов приемного акустоэлектронного процессора подключены к D входам коммутатора дальности, антенная решетка выполнена в виде вогнутой дуговой антенной решетки, Е приемных элементов антенной решетки через блок приемных усилителей соединены с Е входами приемного акустоэлектронного процессора.
Наиболее близким аналогом к заявляемому изобретению по совокупности признаков является техническое решение "Устройство пространственной обработки сигнала и антенна для его реализации" (патент на изобретение RU №2187128 С2 от 10.08.2002], содержащее антенну с двумя выходами и блок сравнения уровней сигналов и принятия решения, выход которого является выходом устройства, при этом первый и второй выходы антенны выполнены с возможностью обеспечения амплитудных распределений поля в ее раскрыве с весовыми функциями f1(x) и f2(x) и введен блок формирования n результирующих диаграмм направленности, каждый из n выходов которого соединен с соответствующим ему входом блока сравнения уровней сигналов и принятия решения, а входы - с выходами антенны. Недостатком технического решения, рассматриваемого в качестве аналога, является то обстоятельство, что оно обеспечивает исключение ложного обнаружения объекта, находящегося только в области боковых лепестков диаграммы направленности, и отсутствие возможности повышения разрешения по азимуту.
Технической задачей, на решение которой направлено заявляемое изобретения является улучшение функциональных возможностей модуля пространственной обработки радиотехнических сигналов за счет реализации процедуры повышения разрешения по азимуту.
Решение технической задачи достигается тем, что модуль пространственной обработки радиотехнических сигналов, содержит блок принятия решений, в который дополнительно введены блок порогового детектирования, четыре канала, каждый из которых состоит из N скоростных фильтров, где N определяется из условия определения точности радиальной скорости цели, каждый скоростной фильтр содержит М блоков обработки дискрет дальности, где М определяется из условия определения точности пространственных координат, первый, второй и третий выходы каждого канала соединен с соответствующим выходом модуля пространственной обработки радиотехнических сигналов, соответствующий вход которого соединен с входом соответствующего канала, первый, второй и третий выходы каждого скоростного фильтра соединены с соответствующим выходом отдельно каждого соответствующего канала, соответствующий выход которого соединен с соответствующим входом соответствующего скоростного фильтра, первый, второй и третий выходы каждого блока обработки дискрет дальности соединены с соответствующим выходом отдельно каждого соответствующего скоростного фильтра, соответствующий выход которого соединен с соответствующим входом соответствующего блока обработки дискрет дальности, причем каждый блок дискрет дальности содержит блок диаграммообразующей схемы, блок порогового детектирования сигнала и блок пространственного разрешения сигнала, первый вход которого соединен с первым выходом блока диаграммообразующей схемы, второй выход которого соединен с первым выходом блока дискрет дальности, и входом блока порогового детектирования сигнала, выход которого соединен с вторым выходом блока обработки дискрет дальности, третий выход которого соединен с выходом блока пространственного разрешения сигнала, первый и второй входы блока диаграммообразующей схемы соединены с первым и вторым входами блока обработки дискрет дальности, третий вход которого соединен с третьим входом блока диаграммообразующей схемы, причем блок диаграммообразующей схемы содержит блок быстрого преобразования Фурье (БПФ), блок задания опорного, два блока умножения, сумматор и блок вычисления линейного набега фазы, выход сигнала которого соединен с вторым входом второго блока умножения, выход которого соединен с вторым выходом блока диаграммообразующей схемы и входом сумматора, выход которого соединен с первым выходом блока диаграммообразующей схемы, первый и второй входы которого соединены с первым и вторым входами быстрого преобразования Фурье, выход которого соединен с первым входом первого блока умножения, второй вход которого соединен с выходом блока задания опорного сигнала, а выход соединен с первым входом второго блока умножения, вход блока вычисления линейного набега фазы соединен с третьим входом блока диаграммообразующей схемы.
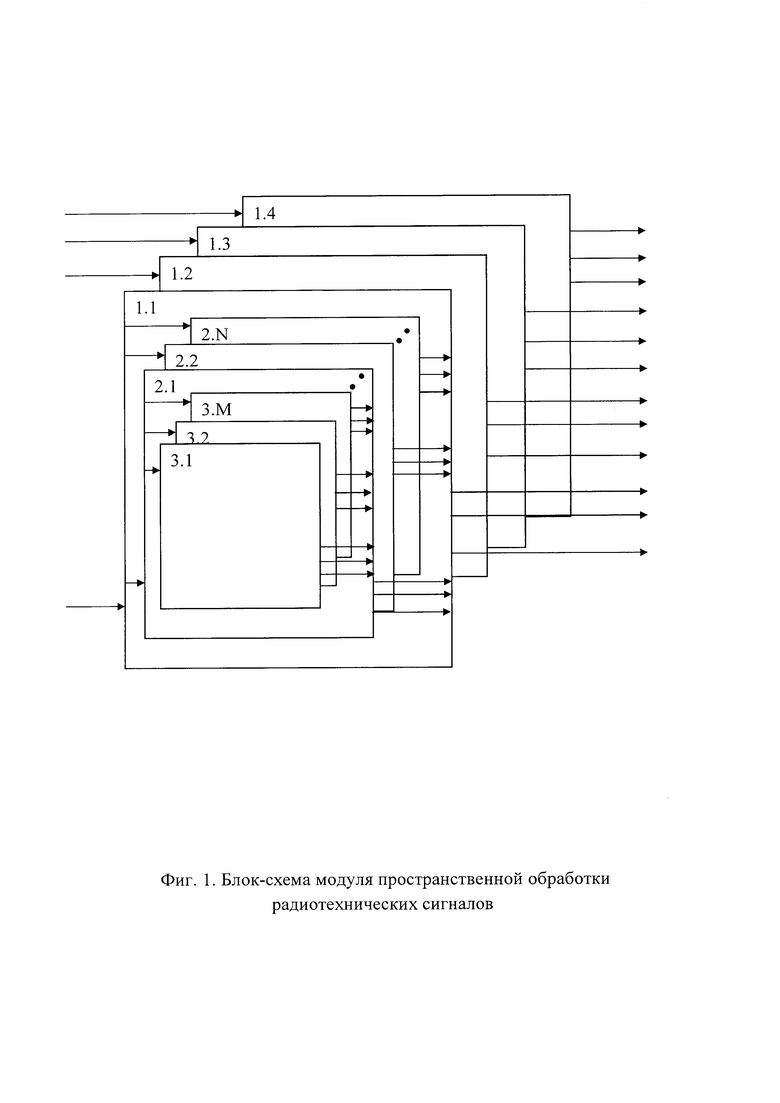
На фиг. 1 представлена блок-схема модуля пространственной обработки радиотехнических сигналов.
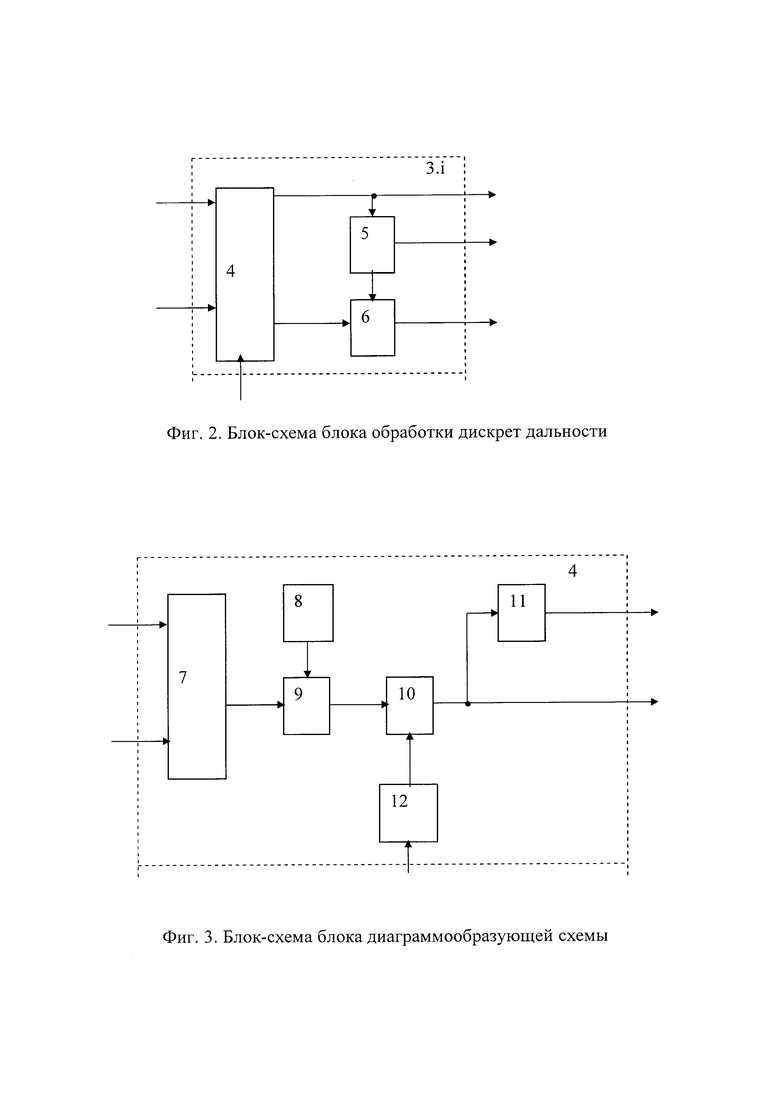
На фиг. 2 представлена блок-схема блока обработки дискрет дальности.
На фиг. 3 представлена блок-схема блока диаграммообразующей схемы.
Модуль пространственной обработки радиотехнических сигналов (фиг. 1) содержит массив каналов (1.1, 1.2, 1.3, 1.4) каждый из которых состоит из N скоростных фильтров (2.1, 2.2, … 2.j, … 2.N), где N определяется из условия определения точности радиальной скорости цели, каждый скоростной фильтр 2.j (где i=1, 2, 3, … 3.i, … 3.N) содержит М блоков обработки дискрет дальности (3.1, 3.2, … 3.М), где М определяется из условия определения точности пространственных координат.
Каждый блок (фиг. 2) обработки дискрет дальности 3.i (где i=1, 2, 3, … М) содержит блок 4 диаграммообразующей схемы, блок 5 порогового детектирования сигнала и блок 6 пространственного разрешения сигнала.
Блок 4 диаграммообразующей схемы (фиг. 3) содержит блок 7 БПФ, блок 8 задания опорного сигнала, два блока умножения 9 и 10, сумматор 11 и блок 12 вычисления линейного набега фазы.
Модуль пространственной обработки радиотехнических сигналов содержит массив каналов (1.1, 1.2, 1.3 и 1.4), каждый из которых состоит из N скоростных фильтров (2.1, 2.2, … 2.j, … 2.N), где N определяется из условия определения точности радиальной скорости цели, каждый скоростной фильтр 2.j (где j=1, 2, 3, … N) содержит М блоков обработки дискрет дальности (3.1, 3.2, … 3.i, … 3.М), где М определяется из условия определения точности пространственных координат, первый, второй и третий выходы каждого канала l.k (где i=1, 2, 3, 4) соединен с соответствующим выходом модуля пространственной обработки радиотехнических сигналов, соответствующий вход которого соединен с входом соответствующего канала 1.k, первый, второй и третий выходы каждого скоростного фильтра 2.j соединены с соответствующим выходом отдельно каждого соответствующего канала l.k, соответствующий выход которого соединен с соответствующим входом соответствующего скоростного фильтра 2.j, первый, второй и третий выходы каждого блока обработки дискрет дальности 3.i соединен с выходом отдельно каждого соответствующего скоростного фильтра 2.j, соответствующий выход которого соединен с соответствующим входом соответствующего блока обработки дискрет дальности 3.i, причем каждый блок обработки дискрет дальности 3.i (где i=1, 2, 3, … М) содержит блок 4 диаграммообразующей схемы, блок 5 порогового детектирования сигнала и блок 6 пространственного разрешения сигнала, первый вход которого соединен с первым выходом блока 4 диаграммообразующей схемы, второй выход которого соединен с первым выходом блока обработки дискрет дальности 3.i, и входом блока 5 порогового детектирования сигнала, выход которого соединен с вторым выходом блока обработки дискрет дальности 3.i, третий выход которого соединен с выходом блока 6 пространственного разрешения сигнала, первый и второй входы блока 4 диаграммообразующей схемы соединены с первым и вторым входами блока обработки дискрет дальности 3.i, третий вход которого соединен с третьим входом блока 4 диаграммообразующей схемы, причем блок 4 диаграммообразующей схемы содержит блок 7 БПФ, блок 8 задания опорного сигнала, два блока умножения 9 и 10, сумматор 11 и блок 12 вычисления линейного набега фазы, выход которого соединен с вторым входом второго блока умножения 10, выход которого соединен с вторым выходом блока 4 диаграммообразующей схемы и входом сумматора 11, выход которого соединен с первым выходом блока 4 диаграммообразующей схемы, первый и второй входы которого соединены с первым и вторым входами блока 7 БПФ, выход которого соединен с первым входом первого блока умножения 9, второй вход которого соединен с выходом блок 8 задания опорного сигнала, а выход соединен с первым входом второго блока умножения 10, вход блока 12 вычисления линейного набега фазы соединен с третьим входом блока 4 диаграммообразующей схемы.
Модуль пространственной обработки радиотехнических сигналов функционирует следующим образом. Выходные данные всех премо-передающих модулей радиотехнических сигналов (ППМ) разделяются по номерам каналов: канал 1.1, канал 1.2, канал 1.3, канал 1.4. Внутри каждого канала из наборов данных выделяются строки, относящиеся к одноименным скоростным фильтрам, и подаются на входы соответствующего скоростного фильтра 2.j. С помощью скоростных фильтров 2.j из строк наборов данных всех ППМ выделяются элементы строк, соответствующие дискрету дальности и подаются на входы соответствующих блоков обработки дискрет дальности 3.i, где объединяются в диаграммообразующей схеме 4 во входной вектор. Комплексные отсчеты принятых сигналов всех ППМ, относящиеся к одному дискрету дальности и одному скоростному фильтру, поступают в блок 7 БПФ, где формируется пространственный спектр распределения поля принятой волны по антенной решетке. Затем полученный пространственный спектр в первом блоке умножения 9 умножается на комплексно сопряженный пространственный спектр опорного сигнала, поступающего с выхода блока 8 задания опорного сигнала. Эта операция устраняет квадратичную составляющую фазового пространственного спектра распределения сигнала, оставляя только линейный набег фазы, характеризующий угол отклонения направления принятого сигнала от опорного (нулевого). Затем в фазовом пространственном спектре устраняется та линейная составляющая набега, которая определяется направлением зондирования сигнала путем умножения пространственного спектра, поступающего с выхода первого блока умножения 9, на вектор линейного набега фазы, поступающего с выхода блок 12 вычисления линейного набега фазы, вычисленного для направления зондирования θК. Выходной сигнал диаграммообразующей схемы формируется в сумматоре 11, складывающий выходные сигналы всех ППМ. В блоке диаграммообразующей схемы из отсчетов сигнала, соответствующих одному дискрету дальности всех ППМ, формируется выходной сигнал пространственного канала для данного дискрета дальности и данного скоростного фильтра, который затем записывается в выходной матрице сигналов канала  в соответствующей строке и столбце. В блоке порогового детектирования 5 выходной сигнал подвергается пороговой обработке, по результатам которой в выходной матрице обнаружения
в соответствующей строке и столбце. В блоке порогового детектирования 5 выходной сигнал подвергается пороговой обработке, по результатам которой в выходной матрице обнаружения  в соответствующей строке и столбце заносится логическая единица, в случае превышения порога, или ноль в случае не превышения.
в соответствующей строке и столбце заносится логическая единица, в случае превышения порога, или ноль в случае не превышения.
Решение об обнаружении цели относится к одному элементу разрешения радиолокационной станции, который имеет три составляющих: дальность, скорость и азимут. Для проведения процедуры повышения разрешающей способности блок диаграммообразующей схемы формирует отсчеты пространственного спектра распределения поля волны по апертуре антенной решетки, которое в виде вектора отсчетов пространственного спектра поступает в блок 6 пространственного разрешения сигнала. Операция реализуется в случае положительного решения о наличии цели, принимаемого в блоке 5 порогового детектирования сигнала. В результате работы блока 6 пространственного разрешения сигнала на его выходе формируется вектор оценок амплитуды сигналов в восьми точках внутри главного лепестка диаграммы направленности пространственного канала. Эти оценки могут быть отображены в системе отображения в виде точек внутри отметки от цели. Все уточненные отметки азимута в дискретах дальности и скоростных фильтрах объединяются в выходную матрицу. Количество строк матрицы определяется количеством обнаруженных целей в данном такте зондирования пространства в данном пространственном канале.
В результате работы модуля пространственной обработки радиотехнических сигналов для каждого пространственного канала l.k формируется три набора выходных данных: матрица обнаружения  размером M×N, содержащая величины булевого типа, характеризующие решение об обнаружении цели в каждом временном стробе и каждом скоростном фильтре; матрица результатов диаграммообразования
размером M×N, содержащая величины булевого типа, характеризующие решение об обнаружении цели в каждом временном стробе и каждом скоростном фильтре; матрица результатов диаграммообразования  , содержащая значения амплитуд сигналов для каждого временного строба и скоростного фильтра и используемая в дальнейшем, как эхо-сигнал; матрица уточнения азимута
, содержащая значения амплитуд сигналов для каждого временного строба и скоростного фильтра и используемая в дальнейшем, как эхо-сигнал; матрица уточнения азимута  размером 8×Nобн, где Nобн - количество элементов разрешения, в которых принято решение об обнаружении цели, характеризующая интенсивность отметок восьми азимутальных точек, расположенных в диапазоне ±2° относительно направления зондирования с дискретностью 0,5°.
размером 8×Nобн, где Nобн - количество элементов разрешения, в которых принято решение об обнаружении цели, характеризующая интенсивность отметок восьми азимутальных точек, расположенных в диапазоне ±2° относительно направления зондирования с дискретностью 0,5°.
Техническим результатом изобретения является улучшение функциональных возможностей модуля пространственной обработки радиотехнических сигналов за счет реализации процедуры повышения разрешения по азимуту.
Описанные элементы заявляемого модуля пространственной обработки радиотехнических сигналов функционально взаимосвязаны и находятся в конструктивном единстве (в едином моно-корпусе; жестко, четко, надежно, соединены; исключение хотя бы одного блока сделает невозможным функционирование модуля), а совокупность его существенных признаков неизвестна из уровня техники.
Заявляемое изобретение представляет собой новое техническое решение, относящееся к радиолокационной технике, и может быть использовано для пространственной обработки радиотехнических сигналов.
Заявляемый модуль пространственной обработки радиотехнических сигналов является промышленно применимым, поскольку может быть реализовано предприятиями (организациями) радиоэлектронной и оборонной промышленности.
Изобретение относится к радиолокационной технике и может быть использовано для пространственной обработки радиотехнических сигналов. Достигаемый технический результат - улучшение функциональных возможностей модуля пространственной обработки радиотехнических сигналов за счет реализации процедуры повышения разрешения по азимуту. Указанный результат достигается тем, что модуль пространственной обработки радиотехнических сигналов содержит блок принятия решений, в который дополнительно введены блок порогового детектирования, четыре канала, каждый из которых состоит из N скоростных фильтров, где N определяется из условия определения точности радиальной скорости цели, каждый скоростной фильтр содержит М блоков обработки дискрет дальности, где М определяется из условия определения точности пространственных координат, первый, второй и третий выходы каждого канала соединены с соответствующим выходом модуля пространственной обработки радиотехнических сигналов, соответствующий вход которого соединен с входом соответствующего канала, первый, второй и третий выходы каждого скоростного фильтра соединены с соответствующим выходом отдельно каждого соответствующего канала, соответствующий выход которого соединен с соответствующим входом соответствующего скоростного фильтра, первый, второй и третий выходы каждого блока обработки дискрет дальности соединены с соответствующим выходом отдельно каждого соответствующего скоростного фильтра, соответствующий выход которого соединен с соответствующим входом соответствующего блока обработки дискрет дальности, причем каждый блок дискрет дальности содержит блок диаграммообразующей схемы, блок порогового детектирования сигнала и блок пространственного разрешения сигнала, первый вход которого соединен с первым выходом блока диаграммообразующей схемы, второй выход которого соединен с первым выходом блока дискрет дальности, и входом блока порогового детектирования сигнала, выход которого соединен со вторым выходом блока обработки дискрет дальности, третий выход которого соединен с выходом блока пространственного разрешения сигнала, первый и второй входы блока диаграммообразующей схемы соединены с первым и вторым входами блока обработки дискрет дальности, третий вход которого соединен с третьим входом блока диаграммообразующей схемы, причем блок диаграммообразующей схемы содержит блок быстрого преобразования Фурье (БПФ), блок задания опорного, два блока умножения, сумматор и блок вычисления линейного набега фазы, выход сигнала которого соединен со вторым входом второго блока умножения, выход которого соединен со вторым выходом блока диаграммообразующей схемы и входом сумматора, выход которого соединен с первым выходом блока диаграммообразующей схемы, первый и второй входы которого соединены с первым и вторым входами быстрого преобразования Фурье, выход которого соединен с первым входом первого блока умножения, второй вход которого соединен с выходом блока задания опорного сигнала, а выход соединен с первым входом второго блока умножения, вход блока вычисления линейного набега фазы соединен с третьим входом блока диаграммообразующей схемы. 3 ил.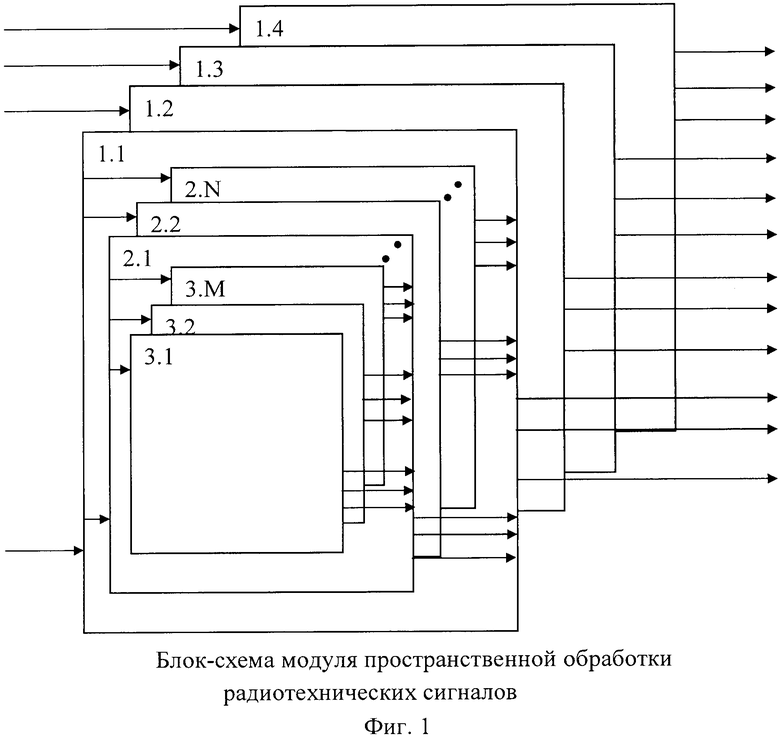
Модуль пространственной обработки радиотехнических сигналов, содержащий блок принятия решения, отличающийся тем, что блок принятия решения содержит четыре канала, каждый из которых состоит из N скоростных фильтров, где N определяется из условия определения точности радиальной скорости цели, при этом каждый скоростной фильтр содержит М блоков обработки дискрет дальности, где М определяется из условия определения точности пространственных координат цели, первый, второй, третий выходы каждого канала являются соответствующими выходами модуля пространственной обработки радиотехнических сигналов, входы первого, второго, третьего и четвертого каналов являются входами модуля пространственной обработки радиотехнических сигналов, первый, второй и третий выходы каждого скоростного фильтра соединены с одноименными выходами каждого из четырех каналов, первый, второй и третий выходы каждого блока обработки дискрет дальности являются выходами соответствующего скоростного фильтра, причем каждый блок обработки дискрет дальности содержит блок диаграммообразующей схемы, блок порогового детектирования сигнала и блок пространственного разрешения сигнала, при этом первый вход блока пространственного разрешения сигнала соединен с первым выходом блока диаграммообразующей схемы, второй выход которого соединен с входом блока порогового детектирования сигнала и является первым выходом блока обработки дискрет дальности, выход блока порогового детектирования сигнала является вторым выходом блока обработки дискрет дальности, третий выход которого является выходом блока пространственного разрешения сигнала, первый, второй и третий выходы блока диаграммообразующей схемы являются первым, вторым и третьим входами блока обработки дискрет дальности, причем блок диаграммообразующей схемы содержит блок быстрого преобразования Фурье (БПФ), блок задания опорного сигнала, два блока умножения, сумматор и блок вычисления линейного набега фазы, при этом выход блока вычисления линейного набега фазы соединен со вторым входом второго блока умножения, выход которого является вторым выходом блока диаграммообразующей схемы, первый и второй входы которого являются первым и вторым входами блока БПФ, выход блока БПФ соединен с первым входом первого блока умножения, второй вход которого соединен с выходом блока задания опорного сигнала, а выход соединен с первым входом второго блока умножения, вход блока вычисления линейного набега фазы является третьим входом блока диаграммообразующей схемы.
| УСТРОЙСТВО ПРОСТРАНСТВЕННОЙ ОБРАБОТКИ СИГНАЛА И АНТЕННА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2187128C2 |
| Приёмо-передающий модуль радиотехнических сигналов | 2017 |
|
RU2661334C1 |
| Приспособление для центровки шпальной тюльки | 1961 |
|
SU139809A1 |
| WO 1997008843 A2, 06.03.1997 | |||
| WO 2016126908 A1, 11.08.2016 | |||
| US 6633251 B1, 14.10.2003 | |||
| US 5003310 A, 26.03.1991. | |||

