Изобретение относится к области радиолокации, в частности к радиолокационным средствам обзора земной поверхности, и может быть использовано в картографии, геодезии, радиолокационной фотограмметрии, в гражданской авиации, в прибрежном мореплавании и в речном судовождении, в картосличительной навигации.
Известны способ радиолокационного обзора земной поверхности и устройство для его осуществления, реализованные в [1]. Этот способ основан на использовании радиальной разрешающей способности, определяемой шириной спектра зондирующего сигнала, и тангенциальной разрешающей способности, определяемой азимутальной шириной луча диаграммы направленности сканирующей антенной системы.
Устройство для осуществления этого способа реализовано в метеонавигационной РЛС "Гроза-М" ([1], стр. 188, рис. 9.2). Оно состоит из узконаправленной в азимутальной плоскости сканирующей антенной системы, приемно-передающего блока и индикаторного блока.
Недостатком указанных способа и устройства являются низкая разрешающая способность, зависимость линейной угловой разрешающей способности от дальности и от горизонтального размера раскрыва антенной системы, а также отсутствие совместной обработки результатов зондирования с целью повышения разрешающей способности на формируемом радиолокационном изображении зондируемой области.
Наиболее близкими к заявленному техническому решению синтеза радиолокационного изображения зондируемой области, принятыми в качестве прототипа, являются способ и устройство синтеза искусственного раскрыва (апертуры) антенны, реализованные в [2]. Этот способ основан на когерентном накоплении при последовательном зондировании отраженных с фиксированной дальности сигналов, принятых в процессе движения в направлении, не совпадающем с направлением зондирования. Для обеспечения когерентности способ требует вычисления и компенсации набега фазы несущей частоты, обусловленного этим движением, и состоит в том, что 1) для каждой дальности t формируют комплексную опорную функцию  , 2) входной комплексный сигнал
, 2) входной комплексный сигнал  , отраженный с дальности t при n-ом зондировании умножают на сформированную комплексную опорную функцию, 3) для каждой дальности f по всем зондированиям n над произведениями осуществляют быстрое преобразование Фурье (БПФ), 4) полученные компоненты спектра детектируют по амплитуде и результат выдают на выход:
, отраженный с дальности t при n-ом зондировании умножают на сформированную комплексную опорную функцию, 3) для каждой дальности f по всем зондированиям n над произведениями осуществляют быстрое преобразование Фурье (БПФ), 4) полученные компоненты спектра детектируют по амплитуде и результат выдают на выход:
где J(q, t) - выходной сигнал,
q - тангенциальная координата синтезируемой точки растра (спектральный компонент БПФ или азимут),
t - радиальная координата синтезируемой точки растра или дальность,
n -порядковый номер зондирования,
M - количество зондирований, по которым осуществляется синтез, - входной комплексный сигнал,
- входной комплексный сигнал, - комплексная опорная функция,
- комплексная опорная функция,
s(t), s'(t), s"(t) - траектория движения и ее временные производные,
|•| - модуль от выражения, обозначенного точкой.
Устройство для осуществления этого способа представлено на фиг.1 в виде фрагмента, выделенного штриховым прямоугольником. Оно состоит из формирователя опорной функции 1, комплексного умножителя 2, блока быстрого преобразования Фурье (БПФ) 3, амплитудного детектора 4.
Указанные блоки соединены следующим образом: первый вход комплексного умножителя 2 является входом устройства, второй вход его соединен с выходом формирователя опорной функции 1, выход комплексного умножителя 2 соединен с входом блока БПФ 3, а выход блока БПФ 3 соединен с входом амплитудного детектора 4, выход которого является выходом устройства.
Недостатком указанных способа и устройства является узкая область применения, обусловленная обязательным несовпадением направления зондирования с направлением движения, необходимостью движения при зондировании в процессе синтеза, обязательным требованием высокоточного вычисления опорной функции, необходимостью реализации компенсации движения путем учета приращения фазы несущей частоты с ошибкой менее одной восьмой доли длины волны зондирующего сигнала (критерий Релея), обязательной комплексностью опорной функции и входного сигнала, зависимостью опорной функции от траектории и динамических параметров движения. Недостатком указанных способа и устройства являются также зависимость синтезируемого углового (поперечного к направлению зондирования) разрешения от радиальной дальности, от азимутальной ширины луча антенной системы, а также наличие бликов, маскирующих синтезированное изображение, и требование фильтрации их.
Целью настоящего изобретения является расширение области применения путем обеспечения возможности синтеза при зондировании как в неподвижном состоянии, так и в движении, устранения необходимости высокоточной фазовой компенсации движения при синтезе, замены когерентной обработки комплексного входного сигнала с учетом фазы несущей частоты на некогерентную обработку вещественного сигнала, устранения зависимости опорной функции от времени, траектории и параметров движения, упрощения опорной функции до вещественных констант, обеспечения возможности хранения заранее вычисленного образца вещественной опорной функции в цифровом постоянном запоминающем устройстве (ПЗУ) и пригодного для всех реально возможных случаев. Кроме того, целью является обеспечение независимости возможности синтезирования от угла между направлением зондирования и направлением движения, устранение зависимости от дальности угловой (поперечной) разрешающей способности на синтезированном радиолокационном изображении зондируемой области, реализация в двух ортогональных направлениях на радиолокационном синтезированном изображении зондируемой области одинакового разрешения, равного радиальной разрешающей способности зондирующего сигнала, обеспечение независимости синтезированного разрешения от азимутальной ширины луча диаграммы направленности антенны и устранение бликов на синтезированном изображении.
Поставленная цель достигается тем, что в способе область зондируют в направлении, не совпадающем с направлением движения, формируют высокоточную комплексную опорную функцию, зависящую от времени (дальности), траектории и динамических параметров движения, отраженные комплексные входные сигналы одноименных радиальных (дальностных) каналов всех зондирующих посылок умножают на вычисляемую в процессе движения комплексную опорную функцию, результаты обрабатывают совместно с применением дискретного финитного преобразования Фурье, затем детектируют по амплитуде и результат выдают на выход, согласно изобретению входной отраженный сигнал независимо от направления зондирования и направления движения детектируют по амплитуде, далее для каждой зондирующей посылки по всем регистрируемым радиальным каналам вычисляют спектр дискретным финитным преобразованием Фурье, умножают вычисленные комплексные спектральные компоненты на инвариантную ко всем ситуациям вещественную опорную функцию, не зависящую от времени, траектории и динамических параметров движения, обращают произведения обратным дискретным финитным преобразованием Фурье, результат детектируют по амплитуде и образованную в результате выходную последовательность сигналов радиальных каналов трансформируют в двумерный матричный сигнал. Затем каждый элемент матричного сигнала накапливают, суммируя одноименные элементы матричных сигналов всех зондирований.
В импульсной радиолокации с применением временной дискретизации входного сигнала уравнение синтеза может быть представлено в дискретном виде:
где M - число зондирований,
q= q(x, y) - закон подстановки индекса при формировании растровой функции, - дискретное финитное преобразование Фурье функции дискретного аргумента p, обозначенной (•), λ - номер спектрального дискретного компонента, N - число регистрируемых радиальных каналов,
- дискретное финитное преобразование Фурье функции дискретного аргумента p, обозначенной (•), λ - номер спектрального дискретного компонента, N - число регистрируемых радиальных каналов,
F
H(λ) - вещественная опорная функция.
Новым в предложенном способе по сравнению с прототипом является амплитудное детектирование входного сигнала, открывающее некогерентный путь синтеза с применением спектральной обработки радиальных каналов одного зондирования, умножения спектральных компонентов на вещественную опорную функцию, заранее вычисленную и не зависящую от параметров движения, обращения спектра, амплитудного детектирования, формирования парциального радиолокационного изображения зондируемой области в виде матричного сигнала подстановкой q=q(x, y), сопоставляющей каждому радиальному каналу с номером q линии в координатах растра (x, y), и, наконец, накопления элементов матричного сигнала по зондирующим посылкам и выдачи результатов накопления на выход. Вся обработка принятого сигнала как по радиальным каналам, так и по зондирующим посылкам осуществляется некогерентно, опорная функция не зависит от условий синтезирования, а элементы разрешения растра имеют разрешающую способность во всех направлениях равную радиальной.
Поставленная цель достигается также тем, что в устройстве синтеза радиолокационного изображения зондируемой области (в штриховом прямоугольнике фиг. 1), содержащем формирователь опорной функции 1, комплексный умножитель 2, блок быстрого преобразования Фурье (БПФ) 3 и амплитудный детектор 4, причем первый вход комплексного умножителя 2 является входом устройства, второй вход его соединен с выходом формирователя опорной функции 1, выход комплексного умножителя 2 соединен с входом блока БПФ 3, а выход блока БПФ 3 соединен с входом амплитудного детектора 4, выход которого является выходом устройства, согласно изобретению формирователь опорной функции 1 выполнен в виде ПЗУ, дополнительно введен амплитудный детектор 5, блок БПФ 6, формирователь растра 7 и накопитель 8, причем вход амплитудного детектора 5 является входом устройства, выход амплитудного детектора 5 соединен с входом блока БПФ 6, выход его соединен с первым входом комплексного умножителя 2, выход амплитудного детектора 4 соединен с входом блока формирования растра 7, выход формирователя растра соединен с входом накопителя 8, выход которого является выходом устройства.
Новым в предложенном устройстве по сравнению с прототипом является включение на первом входе комплексного умножителя 2 дополнительно амплитудного детектора 5, вход которого является входом устройства, и последовательно соединенного с ним блока БПФ 6, исполнение формирователя опорной функции 1 в виде ПЗУ и включение после амплитудного детектора 4 последовательно соединенных формирователя растра 7 и накопителя 8, выход которого является выходом устройства (фиг.1).
Сущность предлагаемого способа состоит в том, что в известном способе синтеза радиолокационного изображения зондируемой области синтезируют искусственную апертуру антенны, совместно обрабатывая когерентно одноименные радиальные каналы разных зондирующих посылок с учетом траектории и параметров движения, а это сужает луч в плоскости движения, повышая угловую разрешающую способность.
Однако в синтезированном луче сохраняется зависимость линейной угловой разрешающей способности от дальности и на радиолокационном изображении появляются блики, что приводит к маскированию и искажению радиолокационного изображения относительно реального. Кроме того, для когерентного накопления требуется высокоточное вычисление в реальном масштабе времени комплексной опорной функции для каждого радиального канала в каждом зондировании.
В настоящей заявке осуществляют непосредственный синтез элементов разрешения всего растра, обрабатывая некогерентно совместно сигналы радиальных каналов, принадлежащие одному зондированию, и затем усредняя результаты по всем зондированиям.
Сущность предлагаемого устройства состоит в комплексировании вычислительной среды, инвариантной к траектории и параметрам движения, обеспечивающей некогерентный синтез радиолокационного изображения зондируемой области.
Предлагаемый способ синтеза радиолокационного изображения включает следующую последовательность операций: а) детектируют по амплитуде входной сигнал, б) вычисляют спектр продетектированного входного сигнала, в) умножают компоненты вычисленного спектра на универсальную вещественную опорную функцию, г) обращают скорректированный умножением спектр в радиальные каналы, д) детектируют по амплитуде радиальные каналы, е) преобразуют результаты детектирования в двумерный матричный сигнал (растр), ж) накапливают элементы матричного сигнала по зондирующим посылкам и выдают на выход результаты накопления.
Устройство синтеза радиолокационного изображения работает следующим образом: входной комплексный сигнал в виде временной последовательности радиальных (дальностных) каналов детектируют по амплитуде в блоке 5, полученный на выходе блока 5 вещественный сигнал трансформируют в блоке БПФ 6 в спектр по радиальным каналам, спектральные компоненты умножают в блоке 2 на универсальную вещественную опорную функцию, хранящуюся в блоке ПЗУ 1, последовательность скорректированных умножением спектральных компонентов обращают в радиальные каналы в блоке 3 обратного финитного дискретного преобразования Фурье, обращенный в блоке 3 сигнал детектируют по амплитуде в блоке 4, результат детектирования преобразуют в блоке 7 в двумерный матричный сигнал (растр), растровый сигнал накапливают по зондирующим посылкам в блоке 8 и накопленные результаты подают на выход устройства.
На фиг.1 приведена структурная схема заявленного устройства синтеза радиолокационного изображения, на котором устройство, выбранное в качестве прототипа, выделено штриховым прямоугольником.
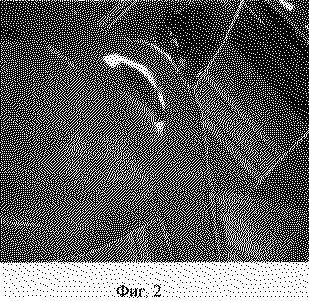
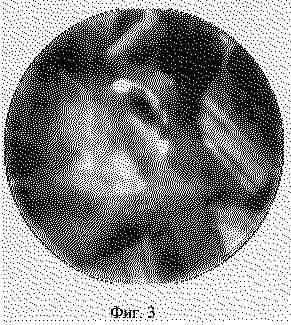
Проверка сущности изобретения была проведена методом математического моделирования устройства и способа на ПЭВМ NEC VERSA М/75, выполненной на процессоре 486. Модель входного сигнала представляла последовательность радиальных (дальностных) каналов, каждый из которых получен суммированием пикселов в выбранной целеуказанием круговой области на оцифрованном аэрофотоснимке. Таким образом, линейная угловая разрешающая способность датчика сигналов предполагалась равной диаметру области. На фиг.2 приведена распечатка экрана монитора, где представлен тестовый аэрофотоснимок местности. При синтезе радиолокационный сигнал реконструировался по этому фотоснимку. Число радиальных каналов, участвующих в синтезе, равнялось 201, число зондирований - 128. Углы визирования при зондировании располагались эквидистантно в диапазоне от 0 до π.. Результат верификации представлен на фиг.3. Один образец сигнала (из 128 участвующих в синтезе радиолокационного изображения) показан на фиг.4, где более гладкая пунктирная кривая представляет собой радиальные каналы имитируемого входного радиолокационного сигнала, а изрезанная - результат обработки до формирования растра.
При реализации предлагаемых способа и устройства синтеза радиолокационного изображения устанавливается блок для цифровой обработки сигналов "Багет-25" [3] в многомашинной конфигурации, состоящий из программируемых процессоров сигналов (ППС) (до 19 штук) и управляющего вычислительного устройства (УВУ), объединенных общей магистралью обмена VME (Virtual Machine Environment). ППС состоит из модуля обработки сигналов БТ55-201А производительностью не менее 50 Mflops или 5 млн "бабочек", модуля буферизации данных БТ55-401А, обеспечивающего прием, буферизацию и коммутацию внутренних (8 разрядов) и внешних (32 разряда) информационных потоков и модуля процессора данных БТ55-202А, предназначенного для управления процессом работы ППС в целом. Функциональный состав конфигурации следующий:
блок 1 - модуль БТ63-201 (БИС Flash-памяти, 48 Мбайт, системная шина VME),
блок 2 - ППС (50 Mflops),
блок 3 - ППС (5 млн "бабочек"),
блок 4 - ППС (50 Mflops),
блок 5 - ППС (5 млн "бабочек"),
блок 6 - ППС (50 MFlops),
блок 7 - ППС (50 MFlops),
блок 8 - ППС (50 Mflops).
Для совместного функционирования модулей в составе устройства синтеза радиолокационного изображения устройство комплексируется УВУ.
Технический результат использования предложенных способа и устройства по сравнению с прототипом состоит в том, что устраняется зависимость возможности синтезирования радиолокационного изображения от угла между направлением зондирования и направлением движения, устраняется требование обязятельности движения во время синтезирования, устраняется зависимость разрешающей способности на синтезированном радиолокационном изображении местности от координат синтезированного растра, обеспечивается равенство продольного и поперечного синтезированных разрешений радиальной разрешающей способности радиолокационного зондирующего сигнала, упрощается аппаратная реализация в силу некогерентной обработки сигнала, вещественности опорной функции и независимости ее от траектории и параметров движения, что может быть использовано в картографии, геодезии, радиолокационной фотограмметрии, в гражданской авиации, в прибрежном мореплавании и в речном судовождении, в картосличительиой навигации.
Литература
1. Радиолокационные системы воздушных судов, под редакцией КТН П.С. Давыдова, М.: Транспорт, 1988.
2. В. Н. Антипов, В.Т. Горяинов и др. (9 соавторов), Радиолокационные станции с цифровым синтезированием апертуры антенны, М.: Радио и связь, 1988.
3. "БАГЕТ" семейство ЭВМ для специальных применений, каталог продукции конструкторского бюро "Корунд-М", издание третье, тел.: 277 27 10, факс: (095) 274 00 77, Москва, 2000 г.
Изобретение относится к радиолокации, в частности к радиолокационным средствам обзора земной поверхности, и может быть использовано в картографии, геодезии, радиолокационной фотограмметрии, в гражданской авиации, в прибрежном мореплавании и речном судовождении, в картосличительной навигации. Достигаемым техническим результатом изобретения является обеспечение независимости процесса синтеза радиолокационного изображения от траектории и параметров движения, фазы входного сигнала, дальности и параметров антенной системы, обеспечение одинаковой во всех направлениях разрешающей способности на синтезированном радиолокационном изображении зондируемой области, равной радиальной разрешающей способности зондирующего сигнала независимо от азимутальной ширины луча диаграммы направленности антенны. Сущность изобретения состоит в комплексировании вычислительной среды, инвариантной к траектории и параметрам движения, обеспечивающей некогерентный синтез радиолокационного изображения зондируемой области. Принимаемый радиолокационный сигнал детектируют по амплитуде, вычисляют спектр по радиальным каналам, взвешивают спектральные компоненты и обращают спектр, формируют растр и накапливают элементы растра. 2 с.п.ф-лы, 4 ил.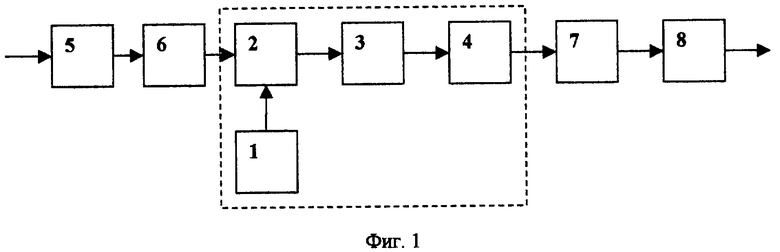
| АНТИПОВ В.Н | |||
| и др | |||
| Радиолокационные станции с цифровым синтезированием апертуры антенны | |||
| - М.: Радио и связь, 1988, с | |||
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
| СПОСОБ КОРРЕКЦИИ НЕКОНТРОЛИРУЕМЫХ ФАЗОВЫХ ИСКАЖЕНИЙ ТРАЕКТОРНОГО СИГНАЛА РАДИОЛОКАЦИОННОЙ СТАНЦИИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 1999 |
|
RU2149423C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| US 6166678 A, 26.12.2000 | |||
| Агрегат для уравновешенного навесного монтажа сборного из блоков пролетного строения моста | 1982 |
|
SU1065518A1 |

