Изобретение относится к области приборостроения, в частности, к блокам демпфирующих гироскопов, используемых в авиационно-космических пилотажных системах управления, в контурах обратной связи для выработки сигнала, пропорционального скорости изменения угла поворота летательного аппарата [1-3].
Известны блоки демпфирующих гироскопов, в которых использованы одноосные датчики угловых скоростей с быстро вращающимся ротором -ДУСУ-М, выпускаемые серийно ОАО «Арзамасское научно-производственное объединение «Темп-Авиа» [4], в которых выходная информация формируется в виде напряжения постоянного тока. Причем заданной номинальной угловой скорости соответствует определенной величины номинальное выходное напряжение.
Основным недостатком таких приборов является невысокая надежность их работы - технический ресурс ДУСУ-М, не превышает 10.000 летных часов. Кроме того, для обеспечения заданной точности измерений при изменении номинальной угловой скорости, на прежнем значении выходного номинального напряжения, необходимо изменение конструкции гироскопа, в частности, массы ротора или скорости его вращения.
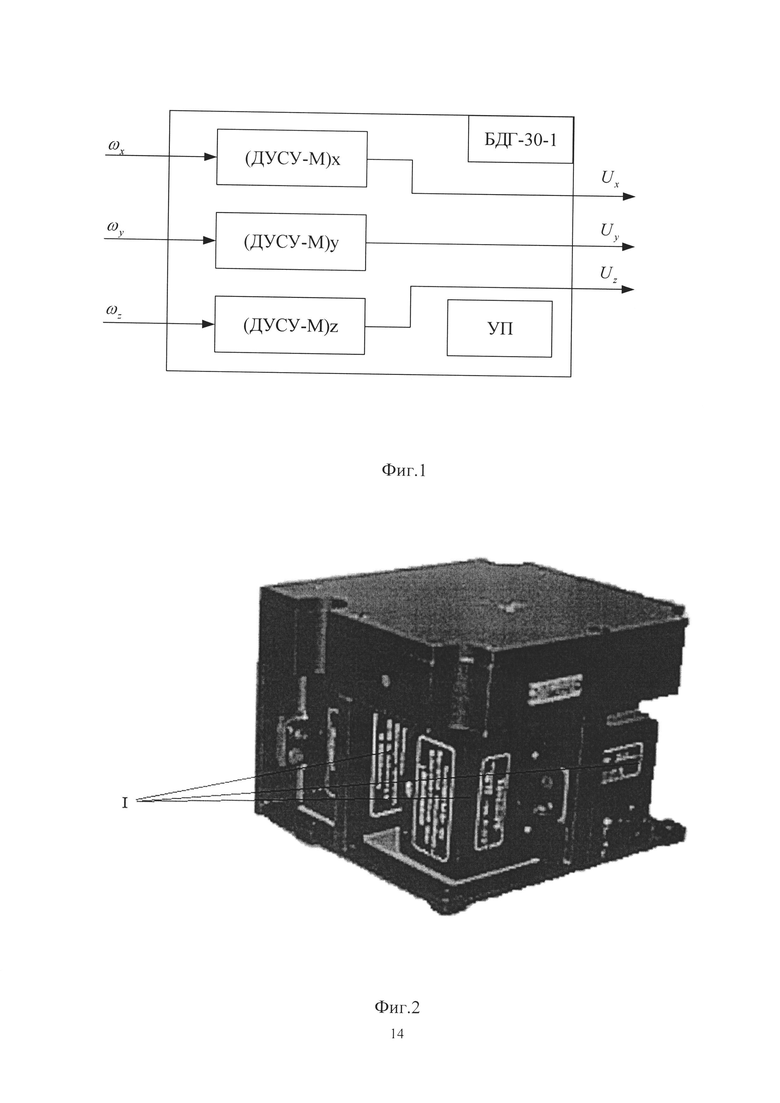
Прототипом предлагаемого изобретения является способ формирования выдачи информации использованный в трехосном блоке демпфирующих гироскопов БДГ-30-1, разработки ОАО «МИЭА» [8], серийно изготавливаемых ОАО «Уральский приборостроительный завод», г. Екатеринбург [9], в котором также использованы ДУСУ-М. Известный способ включает измерение номинальных угловых скоростей по измерительным осям посредством одноосных датчиков угловых скоростей и дальнейшую выдачу измеренных номинальных угловых скоростей в виде одинаковой величины номинальных напряжений по всем измерительным осям (фиг.1 и фиг. 2).
Основным недостатком такого блока демпфирующих гироскопов является отсутствие возможности его унифицированного использования для летательных аппаратов с различной номинальной угловой скоростью по измерительным осям. Использованные в нем одноосные датчики угловых скоростей ДУСУ-М рассчитаны на определенную номинальную угловую скорость. Для каждой номинальной скорости необходимо использовать одноосные датчики угловых скоростей различной конструктивной модификации с измененной массой роторов или измененной скоростью вращения. Следовательно, такие датчики не являются унифицированными, что в значительной мере увеличивает материалоемкость и сложность модернизации летательных аппаратов.
Кроме того, у таких одноосных датчиков угловых скоростей низкий технический ресурс и повышенное энергопотребление, т.к. в их конструкцию входит быстровращающийся массивный ротор, установленный в шарикоподшипниковых опорах, имеющих ограниченный технический ресурс, а для привода во вращение массивного ротора требуется значительное потребление мощности - порядка 12 Вт. Все это отражается на эффективности работы блока гироскопов в целом и величине его межремонтного интервала.
Заявленное изобретение решает задачу создания унифицированного блока гироскопов с аналоговым выходом информации, при этом единовременно достигаются такие технические результаты как повышение надежности и долговечности работы, снижение материалоемкости, энергопотребления и массы трехосного блока демпфирующих гироскопов, и упрощение модернизации летательных аппаратов.
Заявленные технические результаты достигаются способом формирования выходной информации в блоке гироскопов, включающим измерение номинальных угловых скоростей по каждой измерительной оси посредством датчиков угловых скоростей и выдачу полученных параметров в виде аналоговых сигналов, при этом измерение номинальных угловых скоростей осуществляют посредством датчиков угловых скоростей, обеспечивающих формирование выходной информации в оцифрованном виде, затем осуществляют обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости, а затем преобразуют полученные данные в аналоговые сигналы, представляющие собой одинаковые величины номинального напряжения для всех измерительных осей.
Блок гироскопов представляет собой трехосный блок демпфирующих гироскопов.
Обеспечивают электропитание блока гироскопов при кратковременном исчезновении напряжения от источника питания, которым является бортовой источник питания.
Заявленные технические результаты достигаются трехосным блоком демпфирующих гироскопов, состоящим из трех одноосных датчиков угловых скоростей и обеспечивающим выдачу выходных сигналов в аналоговом виде, при этом, датчики угловых скоростей представляют собой микромеханические датчики с цифровыми выходами информации, которые подключены ко входу или входам по меньшей мере одного микроконтроллера, осуществляющего обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости, а выход по меньшей мере одного упомянутого микроконтроллера подключен к трехканальному входу или трехканальным входам по меньшей мере одного цифро-аналогового преобразователя, обеспечивающего получение выходных аналоговых сигналов в виде одинакового номинального напряжения для всех измерительных осей.
Помимо этого, за счет дополнительных элементов конструкции, которые не принципиальны для реализации заявленного способа и трехосного блока демпфирующих гироскопов, в котором реализован заявленный способ, можно получить дополнительные положительные технические эффекты.
Так, для обеспечения необходимого напряжения электропитания элементов блока в блоке демпфирующих гироскопов установлен преобразователь напряжения, который осуществляет необходимые преобразования напряжения источника питания.
Дополнительно можно установить устройство, обеспечивающее электропитание трехосного блока демпфирующих гироскопов при кратковременном исчезновении напряжения от источника питания, представляющее собой, по меньшей мере, один высокоемкостной конденсатор, что позволяет при кратковременном пропадании бортового электропитания в течение 200 мс обеспечить штатную работу трехосного блока демпфирующих гироскопов. Причем, использование высокоемкостного конденсатора дает максимальный эффект с точки зрения надежности и долговечности, но может быть использовано и иное устройство, обеспечивающее электропитание трехосного блока демпфирующих гироскопов при кратковременном исчезновении напряжения от источника питания, например, аккумулятор или иной самостоятельный источник питания или устройство способное сохранять и отдавать заряд.
Объединение элементов блока в одном корпусе, с жестким креплением к нему датчиков угловых скоростей, микроконтроллера, цифро-аналогового преобразователя, преобразователя напряжения от источника питания и устройства, обеспечивающего электропитание трехосного блока демпфирующих гироскопов при кратковременном исчезновении напряжения от источника питания, позволяет обеспечить надежность крепления элементов, за счет заводского контроля, тем самым повысив надежность блока при эксплуатации.
Кроме того, между датчиками угловых скоростей и микроконтроллером, осуществляющим обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости, возможно введение, по меньшей мере, одного дополнительного микроконтроллера, обеспечивающего обработку сигналов от датчиков угловых скоростей и дальнейшую выдачу полученного сигнала на микроконтроллер, осуществляющий обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости. Это позволит повысить надежность блока демпфирующих гироскопов за счет дублирования, причем, целесообразно проводить вышеуказанную обработку посредством разного программного обеспечения для каждого микроконтроллера.
Сущность изобретения поясняется чертежами.
Фиг. 1 - структурно-функциональная схема, демонстрирующая способ формирования выдачи информации в БДГ-30-1 (прототип).
Фиг. 2 - конструкция трехосного блока демпфирующих гироскопов БДГ-30-1 (прототип).
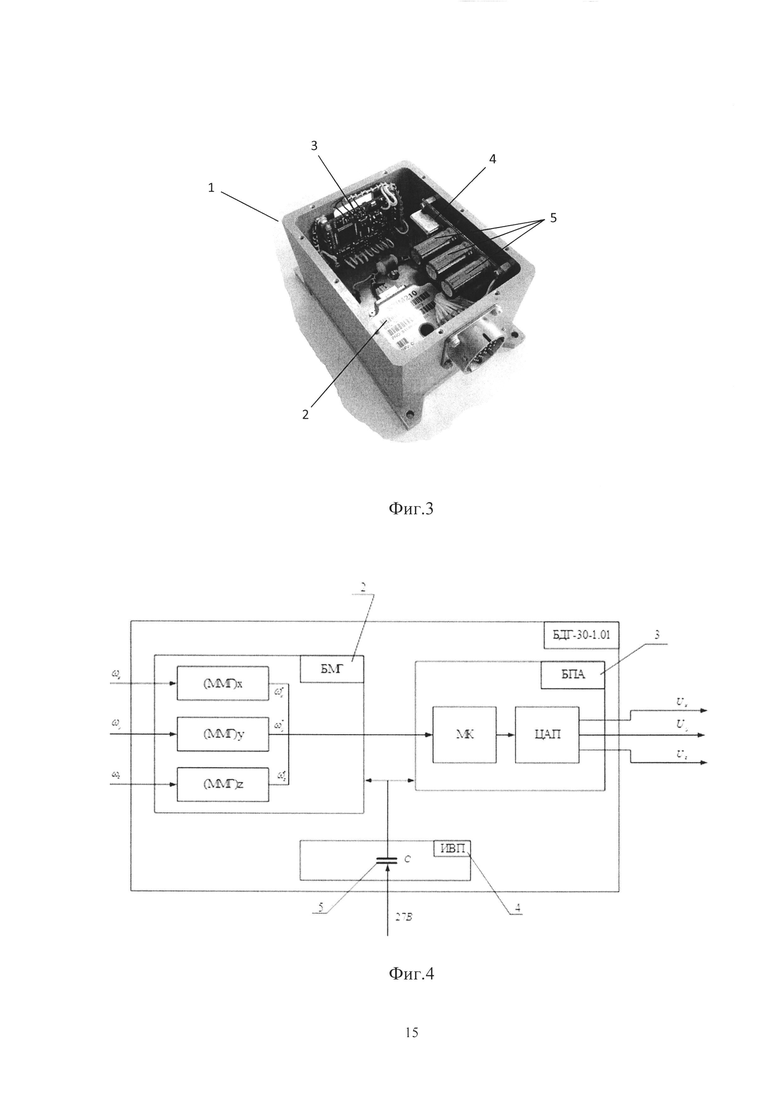
Фиг. 3-конструкция заявленного трехосного блока демпфирующих гироскопов со снятой крышкой.
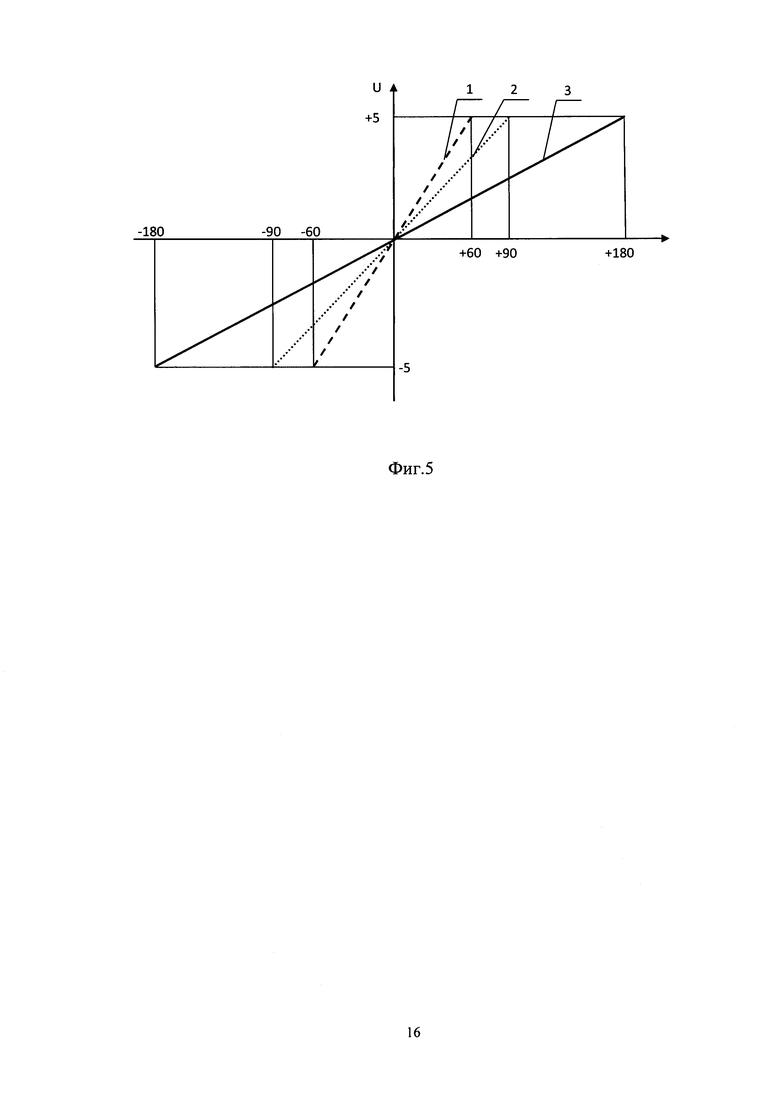
Фиг. 4 - структурно-функциональная схема, демонстрирующая способ формирования выдачи выходной информации заявленного изобретения.
Фиг. 5 - графики выходной информации в заявленном трехосном блоке демпфирующих гироскопов.
Изобретение осуществляют следующим образом.
В предпочтительном варианте исполнения (фиг. 3) заявленный блок гироскопов конструктивно состоит из закрывающегося крышкой корпуса 1, к внутренней поверхности которого жестко прикреплены: блок датчиков угловых скоростей 2, блок преобразования аналоговый 3, включающий микроконтроллер и цифро-аналоговый преобразователь, а также блок 4, содержащий преобразователь напряжения от бортового источника питания с высокоемкостными конденсаторами 5, обеспечивающими электропитание трехосного блока демпфирующих гироскопов при кратковременном исчезновении напряжения от источника питания. Блок датчиков угловых скоростей 2 состоит из трех одноосных датчиков угловых скоростей, представляющих собой ортогонально установленные микромеханические датчики с цифровыми выходами информации (ММГ), которые подключены ко входу или входам по меньшей мере одного микроконтроллера, осуществляющего обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости. Выход, по меньшей мере, одного упомянутого микроконтроллера подключен к трехканальному входу или трехканальным входам по меньшей мере одного цифро-аналогового преобразователя, обеспечивающего получение выходных аналоговых сигналов в виде одинакового номинального напряжения для всех измерительных осей.
Использование датчиков (ММГ) подобного типа, например, датчиков MSG 1100D, STIM 210 или µΙΜU-I [5-7], позволяет обеспечить универсальность блока гироскопов, т.к. не требуется замена датчиков под определенную номинальную угловую скорость летательного аппарата, что необходимо при проведении модернизации, в результате которой улучшаются технические характеристики блока демпфирующих гироскопов. Это обусловлено тем, что такие датчики (ММГ) могут быть использованы на широкий диапазон номинальных угловых скоростей. Однако простая замена известных датчиков (ДУСУ-М) на микромеханические датчики (ММГ) в уже созданной системе не позволяет обеспечить совместимость блока гироскопов с уже существующей системой управления, в которой этот блок используется. В связи с этим, необходимо обеспечить возможность преобразования цифровой информации от датчиков (ММГ) в аналоговый сигнал в виде одинакового номинального напряжения для всех измерительных осей. Для осуществления такого совмещения предлагается использовать заявленный способ, при котором в микроконтроллере осуществляют обработку полученной от датчиков (ММГ) информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости, а затем при помощи цифро-аналогового преобразователя обеспечивают получение выходных аналоговых сигналов в виде одинакового номинального напряжения для всех измерительных осей, после чего полученные аналоговые сигналы поступают потребителю в систему управления самолетом.
Проведенные испытания показали, что заявленная конструкция трехосного блока демпфирующих гироскопов, в котором реализован заявленный способ, позволяет обеспечить универсальность блока для всех существующих типов летательных аппаратов, в которых использованы блоки гироскопов с аналоговым выходом информации, позволяет повысить наработку на отказ с 10.000 часов до 40.000 часов, значительно снизить материалоемкость, на порядок уменьшить потребляемую электроэнергию - с 45 Вт до 4,5 Вт и в 2,5 раза уменьшить массу прибора - с 2,6 кг до 1 кг.
Кроме того, в заявленном трехосном блоке демпфирующих гироскопов могут быть использованы как один микроконтроллер или цифро-аналоговый преобразователь, так и несколько, что позволит увеличить надежность блока гироскопов, например, в случае установки дублирующих микроконтроллеров или цифро-аналоговых преобразователей.
Техническая реализация заявленного изобретения осуществляется следующим образом.
На фиг. 4 показана структурно-функциональная схема заявленного способа формирования выходной информации в аналоговом виде в трехосном блоке демпфирующих гироскопов, где: ωx, ωy, ωz - измеряемые угловые скорости; (ММГ)X, (ΜΜΓ)Y, (ΜΜΓ)Z, - ортогонально установленные по измерительным осям одноосные микромеханические датчики с цифровым выходом информации ( ,
,  ,
,  ), скомпонованные, например, в виде трехосного блока 2; микроконтроллер (МК) и трехканальный цифро-аналоговый преобразователь (ЦАП), скомпонованные, например, в виде блока 3; преобразователь напряжения от источника питания 4 с устройством поддержания электропитания при кратковременном отключении напряжения от бортового источника питания, выполненным, например, в виде высокоемкостного конденсатора 5; Ux, Uy, Uz - выходные напряжения трехосного блока.
), скомпонованные, например, в виде трехосного блока 2; микроконтроллер (МК) и трехканальный цифро-аналоговый преобразователь (ЦАП), скомпонованные, например, в виде блока 3; преобразователь напряжения от источника питания 4 с устройством поддержания электропитания при кратковременном отключении напряжения от бортового источника питания, выполненным, например, в виде высокоемкостного конденсатора 5; Ux, Uy, Uz - выходные напряжения трехосного блока.
Измерение угловых скоростей (ωx, ωy, ωz) осуществляется посредством трех ортогонально установленных друг другу одноосных микромеханических датчиков угловых скоростей (ММГ)X, (ΜΜΓ)Y, (ΜΜΓ)Z, формирующих выходную информацию в цифровом виде , , .
Информация датчиков (ММГ) поступает в микроконтроллер, где она пересчитывается в напряжения Ux, Uy, Uz, используя записанные в памяти микропроцессора масштабные коэффициенты kx, ky; kz. Величины масштабных коэффициентов для каждой измерительной оси kx, ky, kz, которые определяются как отношение заданного номинального выходного напряжения к номинальной угловой скорости для каждой измерительной оси - kx=Uнх/ωнх, ky=Uнy/ωну, kz=Uнz/ωнz, определяются и записываются в память микропроцессора в заводских условиях в процессе отладки трехосного блока демпфирующих гироскопов. Затем преобразуют цифровую информацию в аналоговые сигналы, представляющие собой одинаковой величины номинальные напряжения для разных величин номинальных угловых скоростей по измерительным осям.
На фиг. 5 показаны графики выходной информации в трехосном блоке демпфирующих гироскопов, в котором реализован предложенный способ их формирования. Где: 1 - график выходной характеристики Uy=f(ωy) по измерительной оси Y; 2 - график выходной характеристики Uz=f(ωz) по измерительной оси Z; 3 - график выходной характеристики Ux=f(ωx) по измерительной оси X; ωну=±600/c - номинальная измеряемая угловая скорость по оси Υ; ωнz=±90% - номинальная измеряемая угловая скорость по оси Χ; ωнх=±1800/c - номинальная измеряемая угловая скорость по оси Ζ; Uнx=Uнy=Uнz=±5В - номинальные выходные напряжения по измерительным осям Χ, Y, Z.
Для обеспечения одинаковой величины выходного номинального напряжения при разных измеряемых номинальных угловых скоростях в процессе отладки блока 1, в заводских условиях, определяются необходимые значения масштабных коэффициентов для каждого датчика (ММГ) в виде: для измерительной оси Y-ky=5/60=0,0833 В/0/c; для оси Ζ-kz=5/90=0,055 В/0/c: для оси X-kx=5/180=0,277 В/0/c. Эти значения масштабных коэффициентов записываются в память микроконтроллера, где в процессе штатной работы блока гироскопов осуществляется пересчет угловых скоростей, измеряемых датчиками (ММГ) в цифровом виде, в выходное напряжение в цифровом виде:  ,
,  ,
,  . Полученные в микроконтроллере значения напряжений в цифровом виде передаются в цифро-аналоговый преобразователь, где они преобразуются в аналоговые выходные сигналы Ux, Uy, Uz. При этом при неодинаковых номинальных угловых скоростях по измерительным осям ωнx≠ ωнy≠ ωнz выходные значения номинальных напряжений будут равны друг другу Uнx=Uнy=Uнz=±5В.
. Полученные в микроконтроллере значения напряжений в цифровом виде передаются в цифро-аналоговый преобразователь, где они преобразуются в аналоговые выходные сигналы Ux, Uy, Uz. При этом при неодинаковых номинальных угловых скоростях по измерительным осям ωнx≠ ωнy≠ ωнz выходные значения номинальных напряжений будут равны друг другу Uнx=Uнy=Uнz=±5В.
Заявленный способ легко реализуем с помощью известных конструктивных элементов в конструкции трехосного блока демпфирующих гироскопов.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Гироскопические системы, ч. II Гироскопические системы и приборы, под. редакцией Д.С. Пельпора, М., высшая школа, 1971, 488 с.
2. Браславский Д.А., Логунов С.С., Пельпор Д.С. Авиационные приборы и автоматика, М., Машиностроение, 1978, 427 с.
3. Галкин В.И. Перспективные гироскопы летательных аппаратов, ISBN: 978-3-659-47948-9, LAP LAMBERT Academic Publishing, Saarbrucken, Deutschland, 2013, 146 c.
4. ДУСУ-М - одноосный датчик угловых скоростей, http://www.temp-avia.ru/index-24.htm.
5. Техническое описание одноосного микромеханического датчика угловых скоростей с цифровым выходом информации MSG 1100D китайской фирмы МТ Microsystems, www.cetcmems.com.
6. Техническое описание трехосного микромеханического датчика угловых скоростей STIM 210 норвежской фирмы Sensonor - с цифровым выходом информации, www.sensonor.com.
7. Техническое описание трехосного микромеханического измерителя угловых скоростей и линейных ускорений µIΜU - I фирмы Northrop Grumman, www. northropgrumman.litef.com.
8. Комплексная система управления КСУ-130 для самолета ЯК-130, ОАО «МИЭА», http://aomiea.ru/complexsystemupr.html.
9. Блок демпфирующих гироскопов БДГ-30-1, ОАО «Уральский приборостроительный завод», г. Екатеринбург, http://upz.ru/ru/avia.html#.
10. Блок демпфирующих гироскопов БДГ-30-1, http://snkplus.ru/produktsiya/blok-dempfiruyushchikh-giroskopov-bdg-30-1.html.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения исправной работы гиромоторов блока демпфирующих гироскопов | 2023 |
|
RU2803706C1 |
| Сейсмокардиоблок и способ измерения сейсмокардиоцикла | 2017 |
|
RU2679296C1 |
| Система формирования выходного сигнала блоков демпфирующих гироскопов | 2017 |
|
RU2676049C1 |
| Микромеханический гироскоп | 2019 |
|
RU2714870C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2691551C1 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| Способ определения исправной работы гиромоторов блока демпфирующих гироскопов | 2023 |
|
RU2805375C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2347190C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2400708C1 |
Изобретение относится к области приборостроения. Сущность изобретения заключается в том, что осуществляют измерение номинальных угловых скоростей по каждой измерительной оси посредством датчиков угловых скоростей и выдачу полученных параметров в виде аналоговых сигналов, при этом измерение номинальных угловых скоростей осуществляют посредством датчиков угловых скоростей, обеспечивающих формирование выходной информации в оцифрованном виде, затем осуществляют обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости, а затем преобразуют полученные данные в аналоговые сигналы, представляющие собой одинаковые величины номинального напряжения для всех измерительных осей. Технический результат - повышение надежности и долговечности работы, снижение материалоемкости, энергопотребления и массы трехосного блока демпфирующих гироскопов и упрощение модернизации летательных аппаратов. 2 н. и 11 з.п. ф-лы, 5 ил.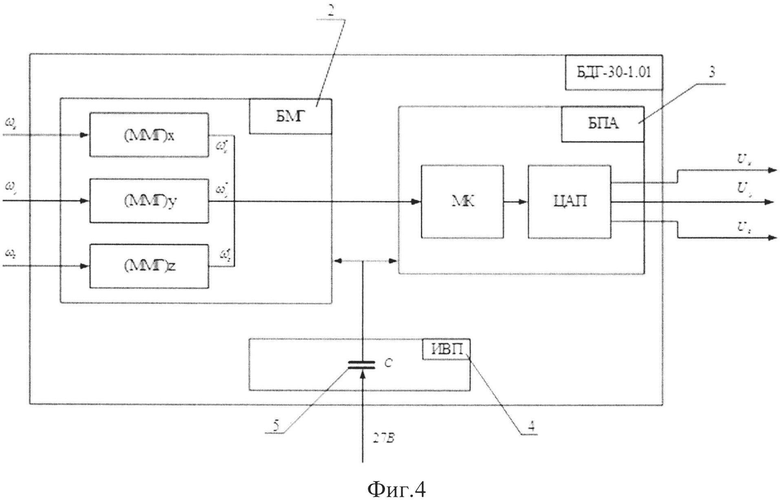
1. Способ формирования выходной информации в блоке гироскопов, включающий измерение номинальных угловых скоростей по каждой измерительной оси посредством датчиков угловых скоростей и выдачу полученных параметров в виде аналоговых сигналов, отличающийся тем, что измерение номинальных угловых скоростей осуществляют посредством датчиков угловых скоростей, обеспечивающих формирование выходной информации в оцифрованном виде, затем осуществляют обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости, а затем преобразуют полученные данные в аналоговые сигналы, представляющие собой одинаковые величины номинального напряжения для всех измерительных осей.
2. Способ по п. 1, отличающийся тем, что блок гироскопов представляет собой трехосный блок демпфирующих гироскопов.
3. Способ по п. 1, отличающийся тем, что обеспечивают электропитание блока гироскопов при кратковременном исчезновении напряжения от источника питания.
4. Способ по п. 3, отличающийся тем, что источник питания является бортовым источником питания.
5. Трехосный блок демпфирующих гироскопов, состоящий из трех одноосных датчиков угловых скоростей и обеспечивающий выдачу выходных сигналов в аналоговом виде, отличающийся тем, что датчики угловых скоростей представляют собой микромеханические датчики с цифровыми выходами информации, которые подключены ко входу или входам по меньшей мере одного микроконтроллера, осуществляющего обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости, а выход по меньшей мере одного упомянутого микроконтроллера подключен к трехканальному входу или трехканальным входам по меньшей мере одного цифро-аналогового преобразователя, обеспечивающего получение выходных аналоговых сигналов в виде одинакового номинального напряжения для всех измерительных осей.
6. Трехосный блок демпфирующих гироскопов по п. 5, отличающийся тем, что электропитание элементов блока осуществляется от источника питания через преобразователь напряжения.
7. Трехосный блок демпфирующих гироскопов по п. 6, отличающийся тем, что преобразователь установлен в блоке демпфирующих гироскопов.
8. Трехосный блок демпфирующих гироскопов по п. 5, отличающийся тем, что дополнительно установлено устройство, обеспечивающее электропитание трехосного блока демпфирующих гироскопов при кратковременном исчезновении напряжения от источника питания.
9. Трехосный блок демпфирующих гироскопов по п. 8, отличающийся тем, что устройство, обеспечивающее электропитание трехосного блока демпфирующих гироскопов при кратковременном исчезновении напряжения от источника питания, представляет собой по меньшей мере один высокоемкостной конденсатор.
10. Трехосный блок демпфирующих гироскопов по п. 5, отличающийся тем, что источник питания является бортовым источником питания.
11. Трехосный блок демпфирующих гироскопов по п. 5, отличающийся тем, что датчики угловых скоростей установлены ортогонально друг другу.
12. Трехосный блок демпфирующих гироскопов по п. 5, отличающийся тем, что блок состоит из закрывающегося крышкой корпуса, к которому жестко прикреплены: блок датчиков угловых скоростей, блок преобразования аналоговый, включающий микроконтроллер и цифро-аналоговый преобразователь, а также блок, включающий преобразователь напряжения от источника питания с высокоемкостными конденсаторами, обеспечивающими электропитание трехосного блока демпфирующих гироскопов при кратковременном исчезновении напряжения от источника питания.
13. Трехосный блок демпфирующих гироскопов по п. 5, отличающийся тем, что между датчиками угловых скоростей и микроконтроллером, осуществляющим обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости, дополнительно установлен по меньшей мере один микроконтроллер, обеспечивающий обработку сигналов от датчиков угловых скоростей и дальнейшую выдачу полученного сигнала на микроконтроллер, осуществляющий обработку полученной информации с использованием заданных коэффициентов для каждой измерительной оси, которые определяются как отношение заданного номинального выходного напряжения к заданной номинальной угловой скорости.
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |

