В предлагаемом механизме для преобразования вращательного движения В движение по за1М1К«утому контуру, состоящему из прямолинейных отрезков, шестерня сцеплена с замкнутой 1рейжой, имеющей вид вытянутого эллипса, «есущего два пальца.
При вращении шестерни один палец рейки перемещается до круговой направляющей, а второй - по замкнутому многоугольнику, описанН01му вокруг круговой направляющей.
В местах касания сторон многоугольника помещены подпружинекные клинья, автоматически откидываемые проходящим пальцем и выполняющие роль стрелок при переводе пальца из круговой Hainpa-вляющей в прямолинейную. В то время, когда адия из пальцев перемещается по кругу, второй палец совершает прямолинейное движение по заданному контуру.
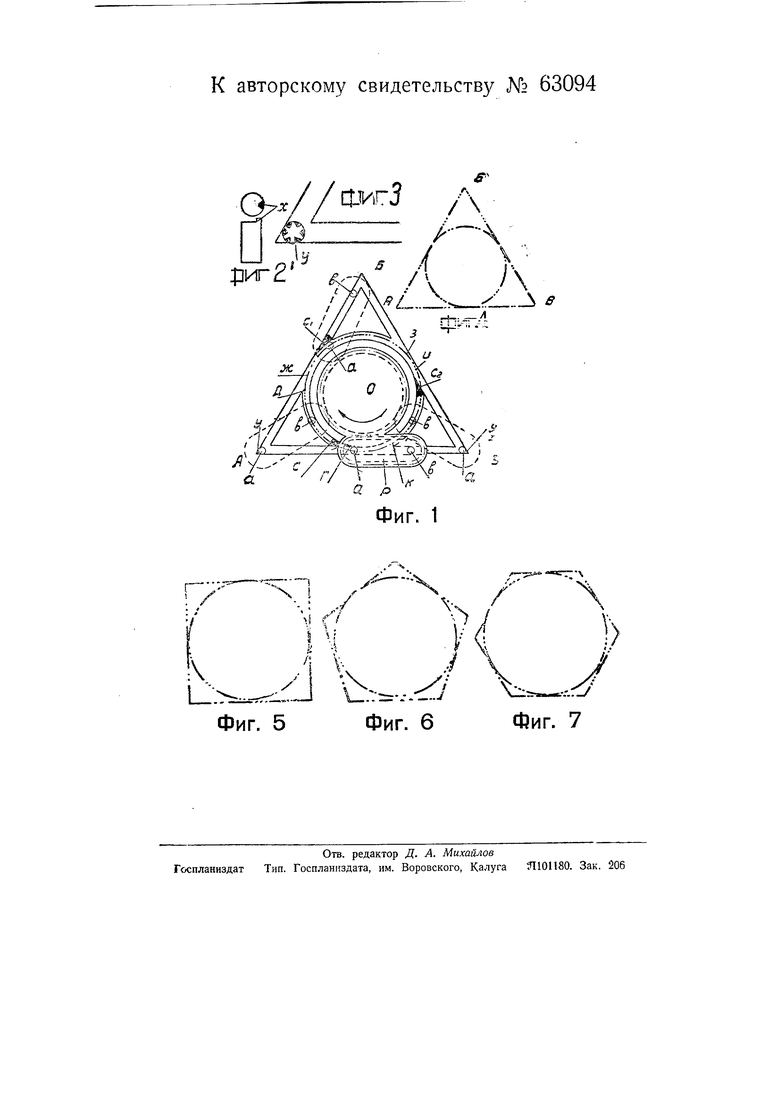
На чертеже фиг. 1 изображает схему механизима, фиг. 2 - вид в двух проекциях пальца замкнутой рейки; фиг. 3 - деталь узла А по фиг. 1; фиг. 4, 5, 6, 7 -различные формы контура механизма.
Механизм заключает в себе шестерню О, сцепленную с замкнутой рейкой Р (фиг. 1).
Пальцы айв, монтированные на рейке Р, при движении последней последовательно перемещаются по замкнутому равностороннему треугольнику АБВ и вписанной в этот треугольник окружности ГДЖЗИК.
Налравление движения пальцев а и б и устранение «мёртвого хода осуществляется при помощи направляющих клиньев С, Сь С2, действующих от опережающего пальца а или в при движении рейки Р, и звёздочек У, установленных по углам треугольника АБВ.
При вращении шестерни О по направлению стрелки, рейка Р от исходного положения, изображённого на чертеже, совершает прямолинейное движение влево по направлению ВА. Как только палец а зайдёт за край клина С, он заставит клин С перекрыть прямолинейную направляющую, вследствие чего до прихода пальца а в точку А, палец в перемещается по дуге ГД.
Под действием пружин, клинья С, Ci €2 всегда прикрывают направляющие, расположенные по окружностя, а поэтому палец в перемещается по прямолинейному участку ЖБ.
До приходл в точку Б палец в воздействует иа клин Ci, в результате чего прямолинейное движение пальца а переходит в круговое по дуговому участку ЖЗ. Таким же образом совершаются дальнейшие движения до приходл пальца а в точку В.
При движении рейки Р по прямолинейному участку iBA опережающим пальцем будет палец в.
В момент нахождения пальца в точках А, Б или В, когда рейка Р обкатывается по шестерне О, движение может прекратиться, так как под действием бокового давления этот палец может получить возвратное движение и заклинить тем самъгм всю систему.
Во избежение этого, по углам треугольника АБВ предусмотрено устройство (фиг. 3), заключающее в себе звёздочку У, взаимодействующую с уступом X пальца и предназначенную для вывода пальца из мёртвого положения.
На фиг. 4, 5, 6 и 7 показаны возможные пути пальцев, соответствующие замкнутому контуру из прямолинейных отрезков iB виде треугольника, квадрата, пятиугольника и щестиугольника. При чётном числе сторон замкнутого многоугольника опережающим пальцем будет один и тот же палец при каждом цикле.
П Р е д 1 е т изобретения
I. Механизм для преобразования вращательного движения в движение по заданному зам Кнуто1М1у контуру из прямолинейных отрезков, отличающийся приименением замкнутой рейки Р, сцепленной с ведущей шестерней О и снабжённой пальцами а, в, взаимодействующими с двумя направляющими, из коих одна - правильный многоугольник, а вторая - вписанный в этот многоугольник круг, причём участки последней направляющей в месте её сопряжения с прямолинейной в нанравлении движения перекрыты клиньями, автоматически управляемыми пальцами рейки при проходе последними клина.
2. Форма выполнения ьмеханиз л по п. 1, отличающаяся тем, что клинья выполнены подпружиненными.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1060468A1 |
| Устройство для обработки наружных и внутренних поверхностей деталей многоугольной формы | 1974 |
|
SU707512A3 |
| Механический интегратор | 1982 |
|
SU1034047A1 |
| Стеклоочиститель автомобиля | 1979 |
|
SU961552A3 |
| Гусеничный движитель с обводом из шарнирно сочлененных металлических траков | 1990 |
|
SU1703538A1 |
| Устройство для подачи заготовок в зону обработки пресса | 1976 |
|
SU622389A3 |
| ОПРЕДЕЛЕНИЯ ТОЧЕК ГРАНИЧНЫХ ЛИНИЙСЕЧЕНИЙ, | 1971 |
|
SU311785A1 |
| Полуавтомат для стачивания деталей по заданному контуру | 1974 |
|
SU506665A1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Замок скважинного фрикциона | 1980 |
|
SU1040115A1 |
-i
,/
1
I
ч
.1 V...;
. ..
Фиг. 5
Фиг. 6
