Изобретение относится к устройствам для полунатурного моделирования системы управления (СУ) с головками самонаведения (ГСН) воздушных и космических летательных аппаратов (ЛА), проведения испытаний и исследований работоспособности и управляемости головок самонаведения ЛА, а также для отладки программно-алгоритмического обеспечения бортовых цифровых вычислительных машин (БЦВМ), входящих в состав СУ ЛА и ГСН ЛА.
Устройство для полунатурного моделирования систем управления и самонаведения ЛА позволяет проводить отработку взаимодействия всех бортовых систем ЛА, участвующих в работе систем управления и самонаведения ЛА, отладку программно-алгоритмического обеспечения БЦВМ пассивных, полуактивных, активных ГСН в реальном масштабе времени во всем диапазоне угловых скоростей линии визирования «ЛА-цель» и углов поворота ГСН без искажения динамики контура системы самонаведения ЛА, с имитацией радиошумовой обстановки, в том числе, с имитацией ретрансляционных помех.
Аналогом устройства может служить изобретение RU 2263869, F41G 3/26, G09В 9/08. 2005.
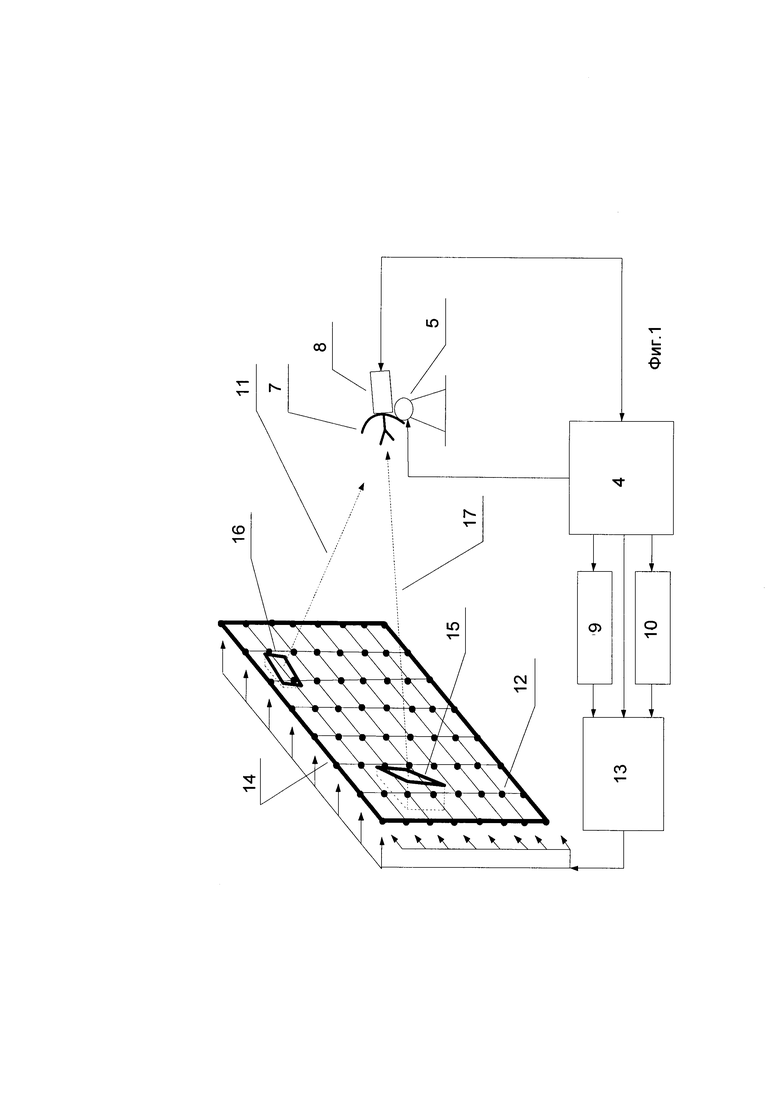
В качестве прототипа устройства рассмотрена заявка на изобретение №2015137623 от 04.03.2015 г «Способ полунатурного моделирования системы самонаведения летательного аппарата и устройство для его реализации», содержащий (фиг. 1) плоскую активную фазированную антенную решетку (АФАР) 14, представляющую набор излучающих элементов 12, имеющих квадратную или треугольную форму расположения на плоскости решетки, из которых формируются сегменты: один сегмент 15 - формирующий полезный сигнал и другие сегменты, формирующие сигналы радиошумовой обстановки. На фиг. 1 показан один из таких сегментов 16. Излучения 17 и 11 каждого из сегментов направлены всегда в сторону ГСН 7, которая совместно с инерциальной системой управления 8 установлена на динамическом поворотном стенде 5, вход которого соединен с первым выходом вычислительно-моделирующего блока 4, на вход которого поступают сигналы с инерциальной системы управления 8. Второй и третий выходы вычислительно-моделирующего блока 4 соединены со входами имитации цели 9 и блока имитации шумовых помех 10, с выходов которых сигналы передаются на первый и второй входы блока переключения излучающих элементов 13, который под управлением вычислительно-моделирующего блока 4, четвертый выход которого подсоединен к третьему входу устройства переключения излучающих элементов 13, распределяет сигналы на излучающие элементы 12, что показано условно.
В моделирующем комплексе прототипа ГСН принимает полезные сигналы излучаемые сегментом, сформированным из излучающих элементов АФАР размером n×m элементов, который перемещается по плоскости решетки, имитируя тем самым взаимное положение ЛА и цели, излучающий сигналы в направлении ГСН, а дополнительно на плоскости АФАР другие сегменты, перемещающиеся вдоль плоскости АФАР, излучают сигналы также в направлении ГСН и имитируют: помехи прикрытия, самоприкрытия, уводящие помехи, доплеровский шум и др., что позволяет воспроизвести радиошумовую обстановку для ГСН близкую к реальной практически во всем диапазоне углового перемещения антенны ГСН ЛА. При этом ГСН работает только в режиме приема сигналов, а радиошумовая обстановка имитируются исходя из априорных знаний о параметрах принимаемых ГСН сигналов.
Таким образом, устройство прототипа не позволяет проводить отладку, испытания, исследования, полунатурное моделирование систем управления и самонаведения ЛА с ГСН активного типа (АГСН), и не имитирует ретрансляционные помехи.
Технический результат и сущность изобретения заключаются в обеспечении возможности проводить работы по отладке, испытаниям, исследованиям, полунатурному моделированию систем управления и самонаведения ЛА с АГСН, а также дополнительно имитировать ретрансляционные помехи.
Технический результат достигается тем, что устройство, содержащее плоскую активную фазированную антенную решетку (АФАР), представляющую набор излучающих элементов, имеющих квадратную или треугольную форму расположения на плоскости решетки, из которых формируются сегменты: первый сегмент, имитирующий отраженные сигналы от цели, второй сегмент, имитирующий сигналы шумовых помех и третий сегмент, имитирующий сигналы ретрансляционных помех, излучения каждого из которых направлены всегда в сторону активной головки самонаведения (АГСН), которая совместно с инерциальной системой управления установлена на динамическом поворотном стенде, вход которого соединен с первым выходом вычислительно-моделирующего блока, на вход которого поступают сигналы с инерциальной системы управления, второй, третий и пятый выходы вычислительно-моделирующего блока соединены со вторым входом блока имитации цели, со входом блока имитации шумовых помех и со вторым входом блока имитации ретрансляционных помех, с выходов которых сигналы передаются на первый, второй и третий входы блока переключения излучающих элементов, выход которого соединен с излучающими элементами, а четвертый и шестой выходы вычислительно-моделирующего блока соединены с четвертым входом блока переключения излучающих элементов и со вторым входом блока приема и обработки сигналов, первый вход которого соединен с выходом АГСН, а выход соединен со вторым входом блока имитации ретрансляционных помех и со вторым входом блока имитации целей, отличающееся тем, что устройство содержит два блока: блок приема и обработки сигналов, в состав которого входят: узел измерителя мощности входных сигналов, узел аттенюатора, и блок имитации ретрансляционных помех, в состав которого входят: узел приема импульсных или непрерывных сигналов, узел модулятора сигналов по амплитуде, фазе, частоте, узел задержки сигналов, узел управления излучением, узел передачи ретрансляционных сигналов, при этом первый вход блока приема и обработки сигналов соединен с выходом АГСН, второй вход соединен с шестым выходом вычислительно-моделирующего блока, выход соединен с первым входом блока имитации цели и с первым входом блока имитации ретрансляционных помех, а первый вход блока имитации ретрансляционных помех соединен с выходом блока приема и обработки сигналов, второй вход соединен с пятым выходом вычислительно-моделирующего блока, выход соединен с третьим входом блока переключения излучающих элементов.
Указанный технический результат достигается тем, что в состав известного устройства (заявка на изобретение №2015137623 от 04.03.2015 г «Способ полунатурного моделирования системы самонаведения летательного аппарата и устройство для его реализации») вводятся дополнительно два новых блока: блок приема и обработки сигналов, в состав которого входят: узел измерителя мощности входных сигналов, узел аттенюатора, и блок имитации ретрансляционных помех, в состав которого входят: узел приема импульсных или непрерывных сигналов, узел модулятора сигналов по амплитуде, фазе, частоте, узел задержки сигналов, узел управления излучением, узел передачи ретрансляционных сигналов и блок имитации ретрансляционных помех.
На фиг. 1 и фиг. 2 представлены чертежи, поясняющие заявленное техническое решение. Фиг. 1 дается для пояснения прототипа. На фиг. 2 для удобства использована оцифровка прототипа.
На фиг. 1 и фиг. 2:
1. Излучающий элемент.
2. Излучающий элемент.
3. Излучающий элемент.
4. Вычислительно-моделирующий блок.
5. Динамический поворотный стенд.
6. Излучающий элемент.
7. Активная головка самонаведения.
8. Инерциальная система управления.
9. Блок имитации цели.
10. Блок имитации шумовых помех.
11. Сигналы, имитирующие шумовые помехи.
12. Излучающий элемент.
13. Блок переключения излучающих элементов.
14. Активная фазированная антенная решетка.
15. Сегмент, имитирующий отраженные сигналы от цели.
16. Сегмент, имитирующий помехи прикрытия, самоприкрытия, уводящие и др.
17. Сигналы, имитирующие отражение от цели.
18. Сегмент, имитирующий ретрансляционные помехи.
19. Сигналы, имитирующие ретрансляционные помехи.
20. Блок приема и обработки сигналов.
20.1. Узел измерителя мощности входных сигналов.
20.2. Узел аттенюатора.
21. Блок имитации ретрансляционных помех.
21.1 Узел приема импульсных или непрерывных сигналов.
21.2. Узел модулятора сигналов по амплитуде, фазе, частоте.
21.3. Узел задержки сигналов.
21.4. Узел управления излучением.
21.4 Узел передачи ретрансляционных сигналов.
Техническая новизна предлагаемого изобретения заключается в том, что за счет включения в структурную схему устройства двух новых блоков: блока приема и обработки сигналов 20 и блока имитации ретрансляционных помех 21, стенд приобретает новое качество - возможность проведения работ по отладке, испытаниям, исследованиям, полунатурному моделированию систем самонаведения ЛА не только с пассивной и полуактивной ГСН но и с активной ГСН, и с имитацией, при этом, ретрансляционных помех.
Устройство для полунатурного моделирования системы управления летательного аппарата с активными головками самонаведения (фиг. 2) содержит плоскую активную фазированную антенную решетку (АФАР) 14, представляющую набор излучающих элементов 1, 2, 3, 6, 12 и др., имеющих квадратную или треугольную форму расположения на плоскости решетки, из которых формируются сегменты: первый сегмент 15, имитирующий отраженные сигналы 17 от цели, второй сегмент 16, имитирующий сигналы шумовых помех 11 и третий сегмент 18, имитирующий сигналы ретрансляционных помех 19, излучения каждого из которых направлены всегда в сторону активной головки самонаведения (АГСН) 7, которая совместно с инерциальной системой управления 8 установлена на динамическом поворотном стенде 5, вход которого соединен с первым выходом вычислительно-моделирующего блока 4, на вход которого поступают сигналы с инерциальной системы управления 8, второй, третий и пятый выходы вычислительно-моделирующего блока 4 соединены со вторым входом блока имитации цели 9, со входом блока имитации шумовых помех 10 и со вторым входом блока имитации ретрансляционных помех 21, с выходов которых сигналы передаются на первый, второй и третий входы блока переключения излучающих элементов 13, выход которого соединен с излучающими элементами 1, 2, 3, 6, 12 и др., а четвертый и шестой выходы вычислительно-моделирующего блока 4 соединены с четвертым входом блока переключения излучающих элементов 13 и со вторым входом блока приема и обработки сигналов 20, первый вход которого соединен с выходом АГСН 7, а выход соединен со вторым входом блока имитации ретрансляционных помех 21 и со вторым входом блока имитации целей 9, отличающееся тем, что устройство содержит два блока: блок приема и обработки сигналов 20, в состав которого входят: узел измерителя мощности входных сигналов 20.1, узел аттенюатора 20.2, и блок имитации ретрансляционных помех 21, в состав которого входят: узел приема импульсных или непрерывных сигналов 21.1, узел модулятора сигналов по амплитуде, фазе, частоте 21.2, узел задержки сигналов 21.3, узел управления излучением 21.4, узел передачи ретрансляционных сигналов 21.5. При этом первый вход блока приема и обработки сигналов 20 соединен с выходом АГСН 7, второй вход соединен с шестым выходом вычислительно-моделирующего блока 4, выход соединен с первым входом блока имитации цели 9 и с первым входом блока имитации ретрансляционных помех 21, а первый вход блока имитации ретрансляционных помех 21 соединен с выходом блока приема и обработки сигналов 20, второй вход соединен с пятым выходом вычислительно-моделирующего блока 4, выход соединен с третьим входом блока переключения излучающих элементов 13.
Устройство для полунатурного моделирования системы управления летательного аппарата работает следующим образом.
Вычислительно-моделирующий блок 4 в общем виде решает уравнения динамики ЛА и пространственного движения ЛА, движения цели и взаимного движения ЛА и цели, и как следствие, формирует сигналы пропорциональные угловым скоростям движения ЛА вокруг центра масс ЛА  и углам ориентации ЛА в пространстве ϕiЛА, которые поступают на динамический поворотный стенд 5, на котором установлена исследуемая ГСН 7 совместно с инерциальной системой управления 8. Одновременно вычислительно-моделирующий блок 4, решая уравнения движения цели относительно ЛА, определяет данные:
и углам ориентации ЛА в пространстве ϕiЛА, которые поступают на динамический поворотный стенд 5, на котором установлена исследуемая ГСН 7 совместно с инерциальной системой управления 8. Одновременно вычислительно-моделирующий блок 4, решая уравнения движения цели относительно ЛА, определяет данные:
- положение цели в пространстве относительно ЛА и соответствующее положение излучающего полезные сигналы сегмента 15 (так, чтобы он был направлен в сторону ГСН) на плоскости АФАР 14, который формируется из излучающих элементов 1, 2, 3, 6, 12 и др. АФАР 14 и имеет размер n×m элементов;
- положение источника ретрансляционных помех в пространстве относительно ЛА и соответствующее положение излучающего сигналы сегмента (в частности, как показано на фиг. 2, сегмента 18, так, чтобы он был направлен в сторону ГСН) на плоскости АФАР 14, который формируется из излучающих элементов 1, 2, 3, 6, 12 и др. АФАР 14 и имеет размер n1×m1 элементов;
- положение источников шумовых помех в пространстве относительно ЛА и соответствующее положение излучающих сигналы сегментов (в частности, как показано на фиг. 2, сегмента 16, так, чтобы он был направлен в сторону ГСН 7) на плоскости АФАР 14, который формируется из излучающих элементов 1, 2, 3, 6, 12 и др. АФАР 14 и имеет размер n2×m2 элементов;
- задержку по фазе излучения каждого излучающего элемента 1, 2, 3, 6, 12 и др. сегментов 15, 18, 15 АФАР 14, которая определяет положение фазового фронта сегментов таким образом, чтобы перпендикуляр к фазовому фронту соответствующих сегментов был направлен на ГСН 7;
- изменение частоты сигналов в функции вычисленной взаимной скорости ЛА и цели, что необходимо для имитации эффекта Доплера;
- мощность сигналов в функции вычисленного расстояния между ЛА и целью с учетом расстояния между АФАР 14 и ГСН 7;
- характеристики цели (ЭПР цели, ракурс цели, расстояние до цели и др.);
- характеристики радиошумовой обстановки и, в том числе, ретрансляционных помех: уровень модуляции сигналов АГСН по амплитуде, фазе, частоте, величина задержки сигналов АГСН;
- флюктуации сигналов, включая изменение поляризации отраженных сигналов для имитации отраженных сигналов от цели.
Эти данные (фиг. 2) из вычислительно-моделирующего блока 4 поступают на блок переключения излучающих элементов 13 АФАР 14, а также на блок приема и обработки сигналов 20, на блок имитации цели 9, блок имитации ретрансляционных помех 21, блок имитации шумовых помех 10 для установки характеристик цели, радиошумовой обстановки и, в том числе, ретрансляционных помех. Сигналы с блоков 21, 9, 10 через блок переключения излучающих элементов 13, который предварительно настроил по командам вычислительно-моделирующего блока 4 излучающие элементы 1, 2, 3, 6, 12 и др. сегментов 15, 16 и 18 на режим передачи, поступают на излучающие элементы 1, 2, 3, 6, 12 и др., совокупность которых, определенная в вычислительно-моделирующем блоке 4 формирует соответствующие сегменты 15, 16, 18, их пространственное положение на АФАР 14, положение фазового фронта каждого сегмента, обусловленное задержкой по фазе излучения каждого излучающего элемента сегмента, выходную мощность излучения и воспроизводит параметры сигналов шумовых помех и ретрансляционых помех, что создает условия для имитации целевой, радиошумовой обстановки и, в том числе, ретрансляционных помех при полунатурном моделировании реального полета ЛА к цели. Сигналы с выхода АГСН 7, поступают на вход блока приема и обработки сигналов 20 по высокочастотному кабелю и после приема и обработки с помощью узлов 20.1 и 20.2 по информации от вычислительно-моделирующего блока 4 подаются на блок имитации цели 9 для имитации сигналов, отраженных от цели 17 и блок имитаци ретрансляционных помех 21, где по информации от вычислительно-моделирующего блока 4 с помощью узлов 21.1 - 21.5 используются для имитации сигналов ретрансляционных помех 19.
При этом в блоках 1-21 используются элементы широкого применения.
Изобретение поясняется чертежом, на котором представлена структурная схема устройства - стенда для полунатурного моделирования системы управления ЛА с головками самонаведения (фиг. 2). На фиг. 2 показаны три типа сегментов, количество которых может быть различным.
Применение устройства для полунатурного моделирования системы управления ЛА позволяют проводить отработку взаимодействия всех бортовых систем ЛА, участвующих в работе систем управления и самонаведения ЛА, отладку программно-алгоритмического обеспечения БЦВМ ГСН в реальном масштабе времени во всем диапазоне угловых скоростей линии визирования «ЛА-цель» без искажения динамики контура системы самонаведения ЛА, с ГСН пассивного, полуактивного и активного типа (АГСН) и имитировать при этом радиошумовую обстановку и, в том числе, ретрансляционные помехи.
Предложенное устройство для полунатурного моделирования системы управления летательного аппарата с активными головками самонаведения позволяет в отдельных случаях осуществлять замену натурных испытаний полунатурным моделированием, что обеспечивает значительное снижение затрат на натурные испытания систем управления ЛА.
Список использованных источников
1. RU 2263869, F41G 3/26, G09В 9/08. 2005.
2. Заявка на изобретение №2015137623 от 04.03.2015 г «Способ полунатурного моделирования системы самонаведения летательного аппарата и устройство для его реализации».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ полунатурного моделирования системы управления летательного аппарата с пассивной или полуактивной или активной головкой самонаведения и устройство для его реализации | 2020 |
|
RU2767956C2 |
| СПОСОБ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610877C1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338992C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2637096C2 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕЛЕВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2751144C1 |
| Способ формирования помехи типа "антипод" | 2021 |
|
RU2777922C1 |
| ДВУХСТЕПЕННОЙ ДИНАМИЧЕСКИЙ ИМИТАТОР ЦЕЛЕЙ | 2005 |
|
RU2273890C1 |
| КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕПЛОВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2740434C1 |

Изобретение относится к устройствам для полунатурного моделирования системы управления (СУ) с головками самонаведения (ГСН) воздушных и космических летательных аппаратов (ЛА), проведения испытаний и исследований работоспособности и управляемости головок самонаведения ЛА, а также для отладки программно-алгоритмического обеспечения бортовых цифровых вычислительных машин (БЦВМ), входящих в состав СУ ЛА и ГСН ЛА. Устройство содержит плоскую активную фазированную антенную решетку - АФАР (14), представляющую набор излучающих элементов (1), (2), (3), (6), (12), имеющих квадратную или треугольную форму расположения на плоскости решетки (14), из которых формируются сегменты, имитирующий отраженные сигналы от цели (15), сигналы шумовых помех (16) и сигналы ретрансляционных помех (18). Излучения каждого из сегментов (15), (16), (18) направлены всегда в сторону активной головки самонаведения -АГСН (7), которая совместно с инерциальной системой управления (8) установлена на динамическом поворотном стенде (5), вход которого соединен с первым выходом вычислительно-моделирующего блока (4), на вход которого поступают сигналы с инерциальной системы управления (8). Второй, третий и пятый выходы вычислительно-моделирующего блока (4) соединены со вторым входом блока имитации цели (9), с входом блока имитации шумовых помех (10) и со вторым входом блока имитации ретрансляционных помех (21), с выходов которых сигналы передаются на первый, второй и третий входы блока переключения излучающих элементов (13), выход которого соединен с излучающими элементами (1), (2), (3), (6), (12). Четвертый и шестой выходы вычислительно-моделирующего блока (4) соединены с четвертым входом блока переключения излучающих элементов (13) и со вторым входом блока приема и обработки сигналов (20), первый вход которого соединен с выходом АГСН (7), а выход соединен со вторым входом блока имитации ретрансляционных помех (21) и со вторым входом блока имитации целей (9). При этом устройство содержит блок приема и обработки сигналов (20), с узлом измерителя мощности входных сигналов, узлом аттенюатора, а также блок имитации ретрансляционных помех (21) с узлом приема импульсных или непрерывных сигналов, узлом модулятора сигналов по амплитуде, фазе, частоте, узлом задержки сигналов, узлом управления излучением, узлом передачи ретрансляционных сигналов. Первый вход блока приема и обработки сигналов соединен с выходом АГСН (7), второй вход соединен с шестым выходом вычислительно-моделирующего блока (4), выход соединен с первым входом блока имитации цели (9) и с первым входом блока имитации ретрансляционных помех (21). Первый вход блока имитации ретрансляционных помех (21) соединен с выходом блока приема и обработки сигналов (20). Второй вход соединен с пятым выходом вычислительно-моделирующего блока (4). Выход соединен с третьим входом блока переключения излучающих элементов (13). Обеспечивается возможности проводить работы по отладке, испытаниям, исследованиям, полунатурному моделированию систем управления и самонаведения ЛА с АГСН, а также дополнительно имитировать ретрансляционные помехи. 2 ил.
Устройство для полунатурного моделирования системы управления летательного аппарата с активными головками самонаведения, содержащее плоскую активную фазированную антенную решетку - АФАР, представляющую набор излучающих элементов, имеющих квадратную или треугольную форму расположения на плоскости решетки, из которых формируются сегменты: первый сегмент, имитирующий отраженные сигналы от цели, второй сегмент, имитирующий сигналы шумовых помех и третий сегмент, имитирующий сигналы ретрансляционных помех, излучения каждого из которых направлены всегда в сторону активной головки самонаведения - АГСН, которая совместно с инерциальной системой управления установлена на динамическом поворотном стенде, вход которого соединен с первым выходом вычислительно-моделирующего блока, на вход которого поступают сигналы с инерциальной системы управления, второй, третий и пятый выходы вычислительно-моделирующего блока соединены со вторым входом блока имитации цели, с входом блока имитации шумовых помех и со вторым входом блока имитации ретрансляционных помех, с выходов которых сигналы передаются на первый, второй и третий входы блока переключения излучающих элементов, выход которого соединен с излучающими элементами, а четвертый и шестой выходы вычислительно-моделирующего блока соединены с четвертым входом блока переключения излучающих элементов и со вторым входом блока приема и обработки сигналов, первый вход которого соединен с выходом АГСН, а выход соединен со вторым входом блока имитации ретрансляционных помех и со вторым входом блока имитации целей, отличающееся тем, что устройство содержит два блока: блок приема и обработки сигналов, в состав которого входят: узел измерителя мощности входных сигналов, узел аттенюатора, и блок имитации ретрансляционных помех, в состав которого входят: узел приема импульсных или непрерывных сигналов, узел модулятора сигналов по амплитуде, фазе, частоте, узел задержки сигналов, узел управления излучением, узел передачи ретрансляционных сигналов, при этом первый вход блока приема и обработки сигналов соединен с выходом АГСН, второй вход соединен с шестым выходом вычислительно-моделирующего блока, выход соединен с первым входом блока имитации цели и с первым входом блока имитации ретрансляционных помех, а первый вход блока имитации ретрансляционных помех соединен с выходом блока приема и обработки сигналов, второй вход соединен с пятым выходом вычислительно-моделирующего блока, выход соединен с третьим входом блока переключения излучающих элементов.
| СПОСОБ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610877C1 |
| US 4660041 A, 21.04.1987 | |||
| 0 |
|
SU269843A1 | |
| EP 3282279 A1, 14.02.2018 | |||
| US 4467327 A | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |

